segmentation
1.[230707] A Sim2Real Deep Learning Approach for the Transformation of Images from Multiple Vehicle-Mounted Cameras to a Semantically Segmented Image in Bird’s Eye View
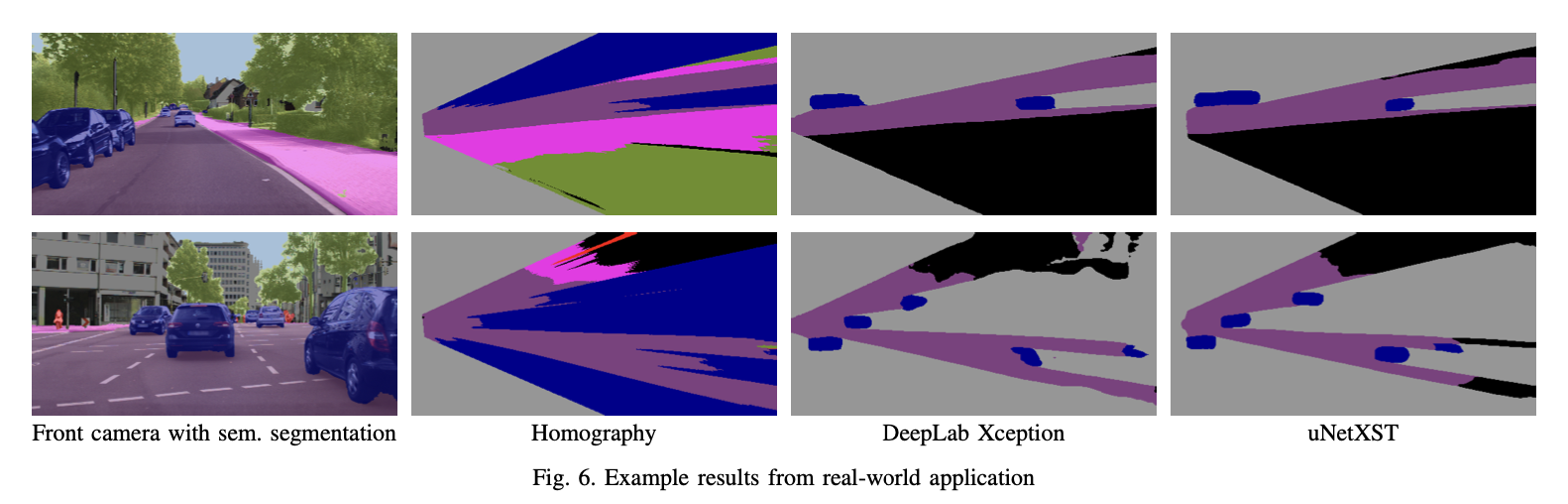
Distances can be more easily estimated when the camera perspective is transformed to a bird’s eye view (BEV). For flat surfaces, Inverse Perspective M
2.[230721] PIDNet
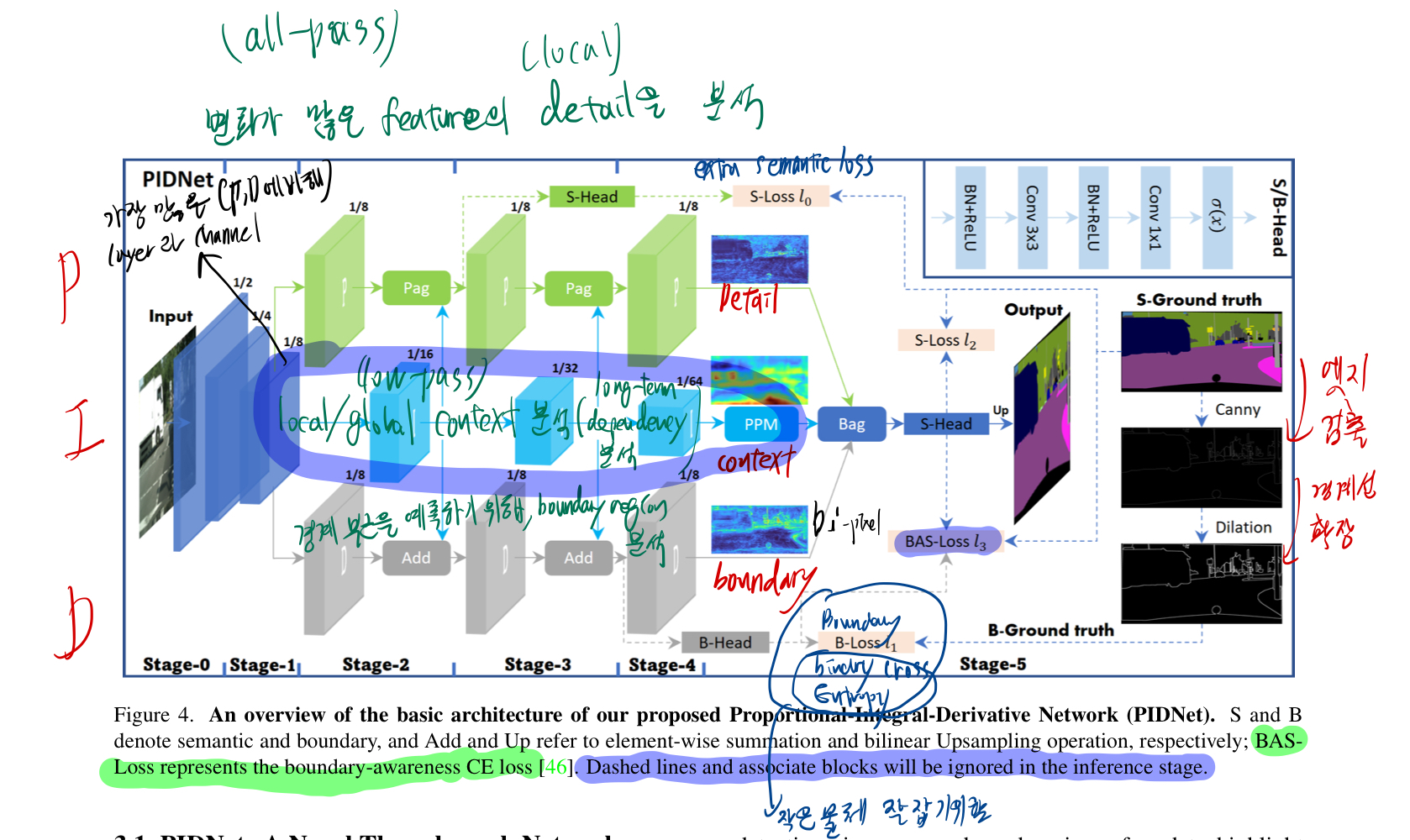
Two branch network architecutrePI 제어기와 같다. (overshoot issue가 있다.)Pcurrentall pass filterdetail을 잡는다.Iall previouslow pass (잘 안바뀌는걸 잡음)context(문맥)을 잡는다
3.ADE20K dataset
오리지널 데이터셋: https://groups.csail.mit.edu/vision/datasets/ADE20K/ADE20K scene parsing dataset: http://sceneparsing.csail.mit.edu
4.CityScapes dataset

test
5.[230804]segment anything
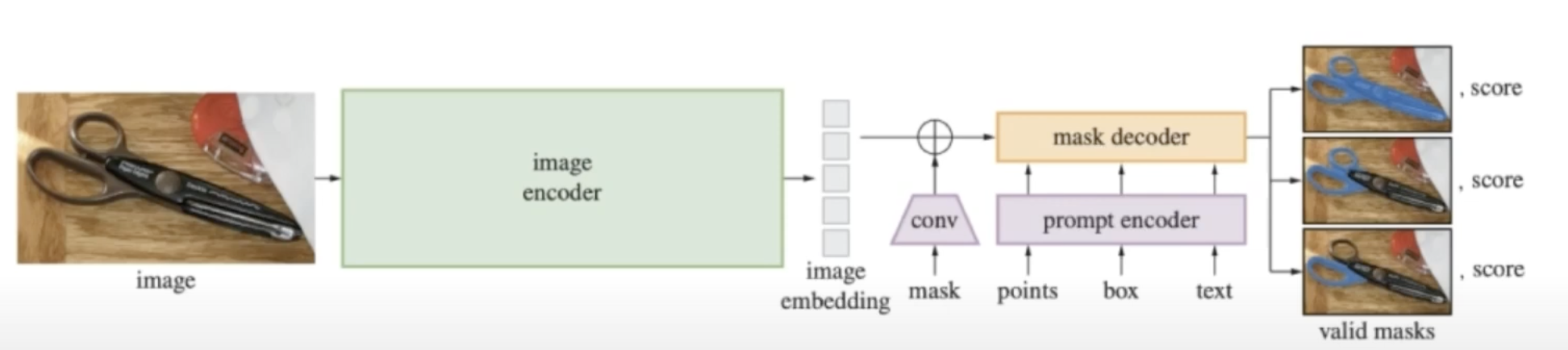
test
6.[230804]Grounded-SAM
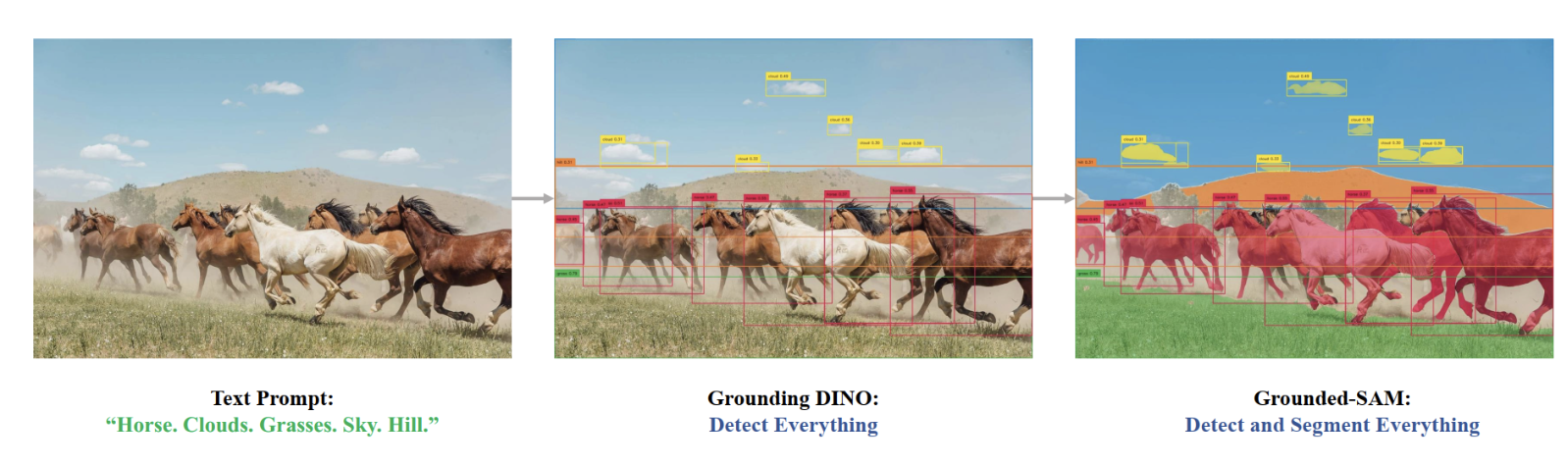
test
7.[230825]masked autoencoder are scalable visual learners
https://arxiv.org/pdf/2111.06377.pdf
8.isaac sim
Isaac Sim aac Sim is available through a platform called Omniverse, created by NVIDIA. Elavator Simulator Step 1. Overwrite all .so files inside the
9.Semantic Segmentation / Instance Segmentation / Panoptic segmentation
요약하자면, 시맨틱 세그멘테이션은 클래스별로 픽셀을 구분하고, 인스턴스 세그멘테이션은 동일한 클래스 내의 개별 개체를 구분하며, 파노프틱 세그멘테이션은 두 방법을 결합하여 이미지 내의 모든 픽셀에 대한 완벽한 세그멘테이션을 제공정의이미지 내의 픽셀마다 레이블을 할당하여
10.spatial inconsistency
"Spatial inconsistency"는 공간적 불일치 또는 불연속성을 의미이미지 또는 시퀀스 내의 픽셀 또는 영역 간의 예상되는 일관성이나 연속성이 없음처리 오류: 알고리즘이나 처리 과정 중에 발생하는 오류로 인해 이미지의 일부분이 다른 부분과 일관성이 없게 보일
11.RTMDet
Real-time instance segmentation에서 좋은 성능https://arxiv.org/pdf/2212.07784.pdf
12.dice loss 사용
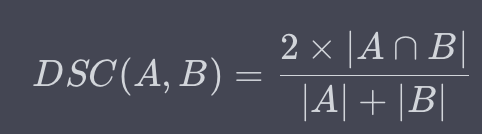
Dice loss는 세그멘테이션 문제에 널리 사용되는 손실 함수입니다. Dice loss는 Dice Similarity Coefficient (DSC) 또는 Sørensen–Dice coefficient라는 측정 지표를 기반으로 합니다. 이 지표는 두 샘플 집합 간의
13.Segment Anything 2
1. 기초 설명 (roboflow) 비디오에서 특정 points를 제공하여 여러 프레임에 걸쳐 추적되는 segmentation mask를 생성할 수 있습니다. 1.1. Segment Anything 2란? SAM 2를 실행하는 방법은 두 가지가 있습니다: 1. 자
14.How to Label Data with Grounded SAM 2

https://blog.roboflow.com/label-data-with-grounded-sam-2/SAM 2는 객체가 무엇인지 이해하지 못하지만, Florence-2라는 멀티모달 모델과 결합하면 텍스트 프롬프트로 이미지 내 특정 영역에 대한 세분화 마스크를