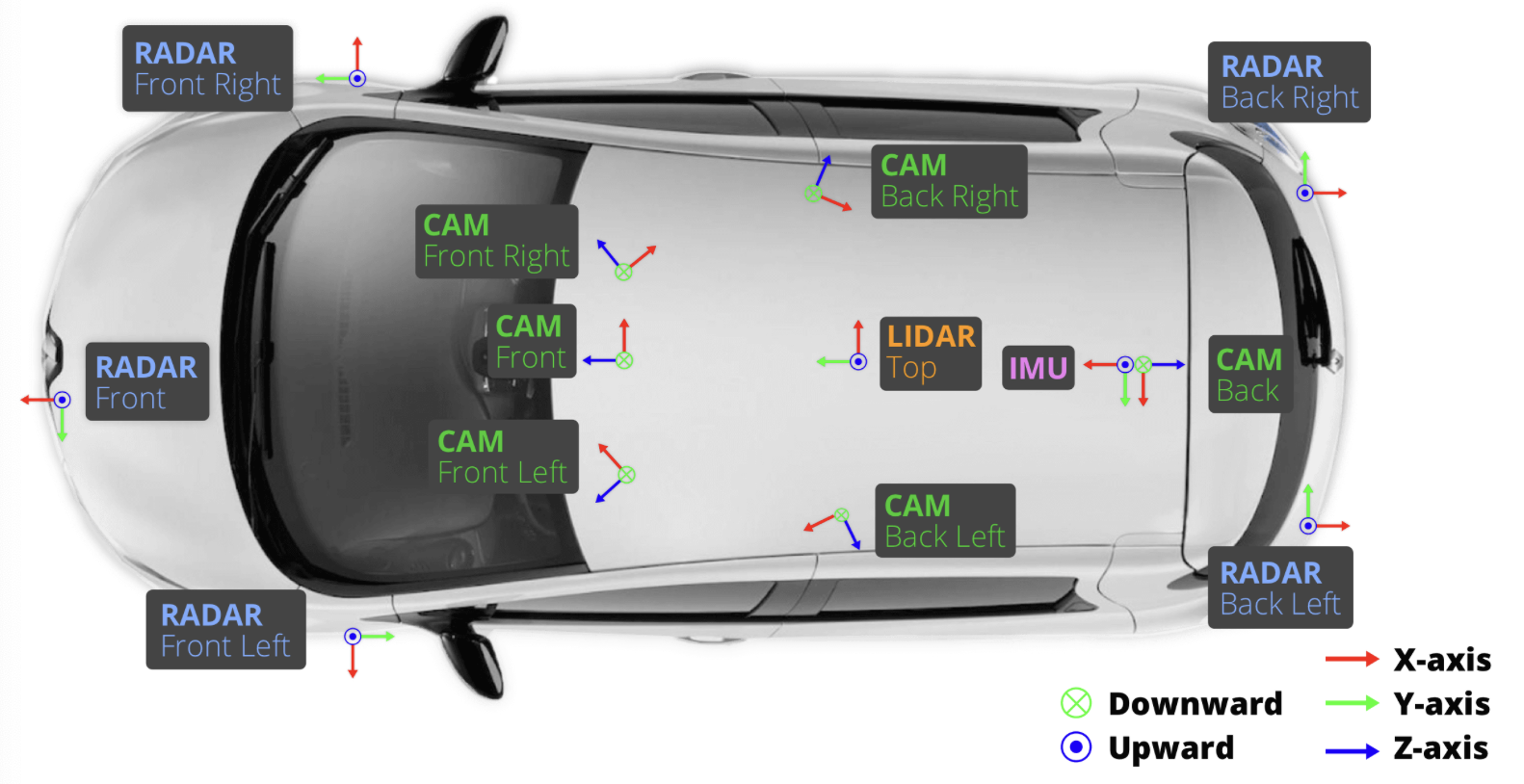
nuScenes
- 6x camera (Basler acA1600-60gc):
- 12Hz capture frequency
- Evetar Lens N118B05518W F1.8 f5.5mm 1/1.8"
- 1/1.8'' CMOS sensor of 1600x1200 resolution
- Bayer8 format for 1 byte per pixel encoding
- 1600x900 ROI is cropped from the original resolution to reduce processing and transmission bandwidth
- Auto exposure with exposure time limited to the maximum of 20 ms
- Images are unpacked to BGR format and compressed to JPEG
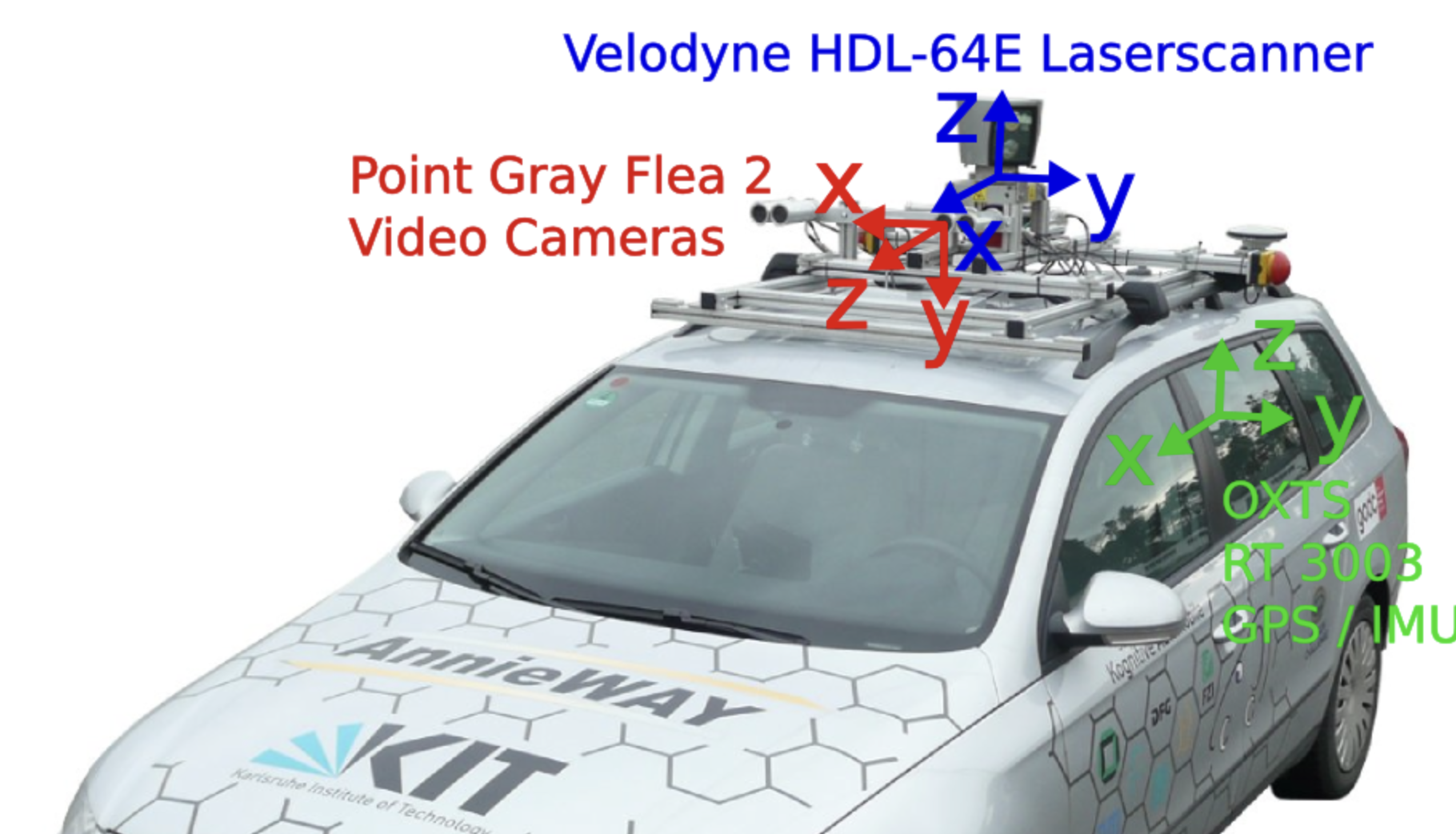
KITTI
-
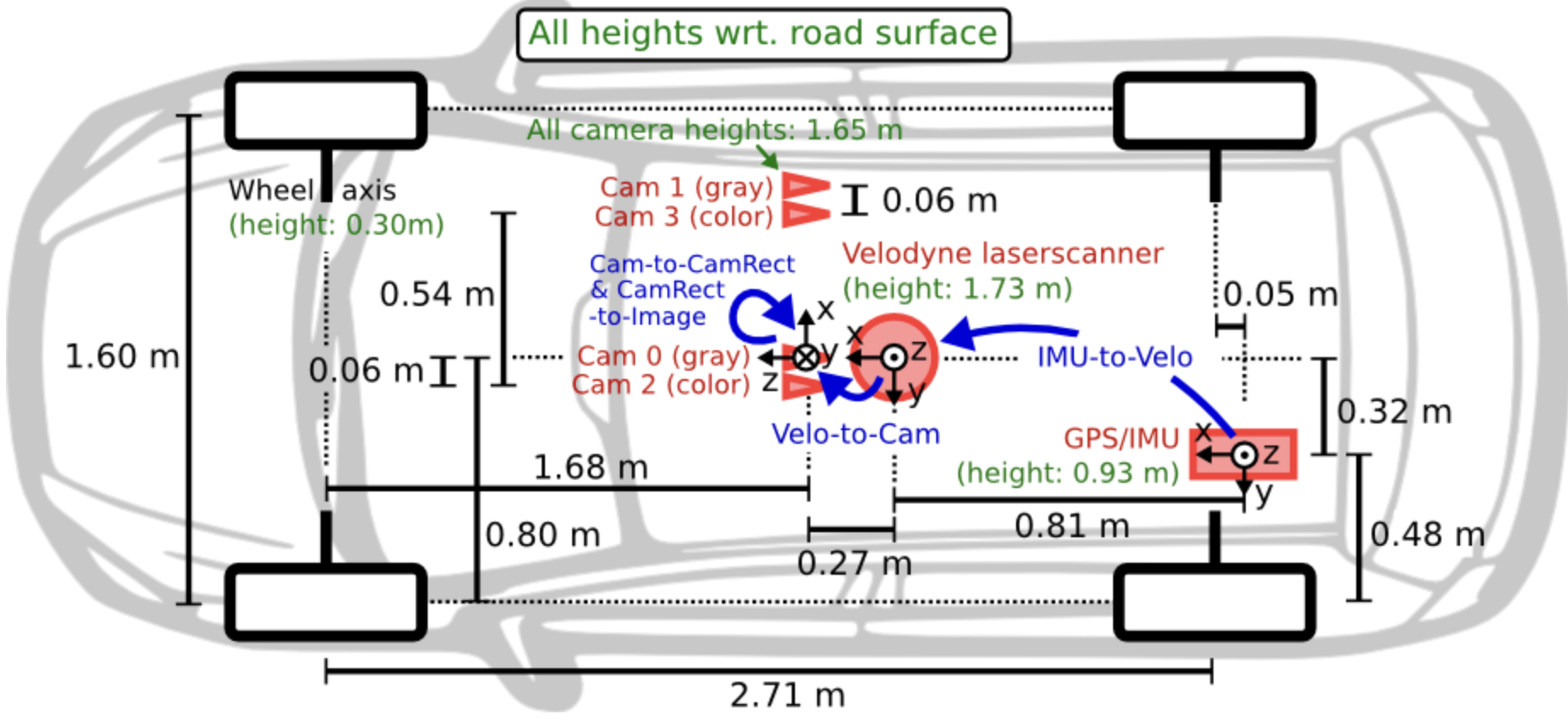
-
-
2 Grayscale cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3M-C)
-
2 Color cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3C-C)
Lyft
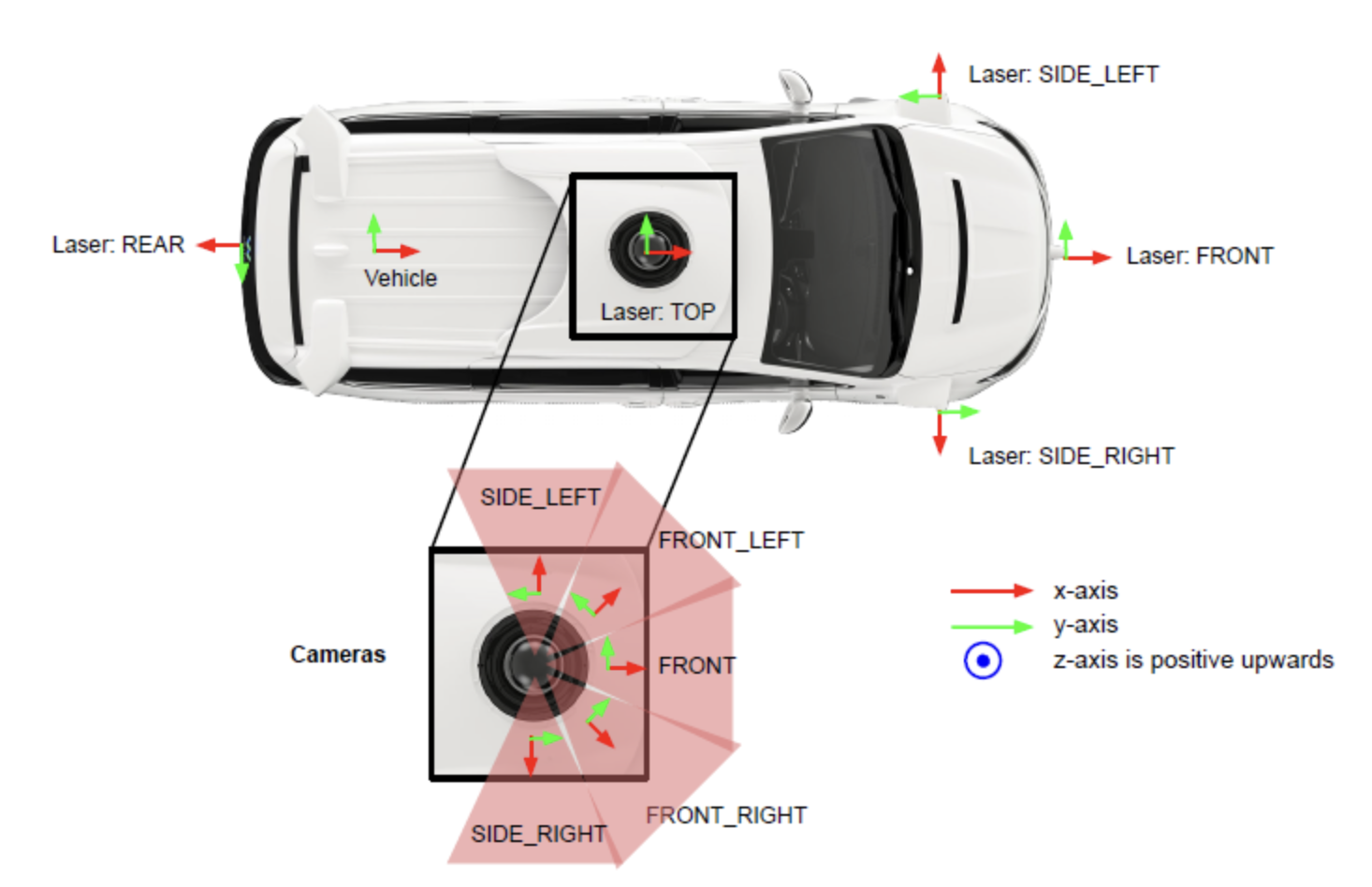
- Dataset camera images are 1920x1280, which is equivalent to Ultra HD resolution and a horizontal field of view (HFOV) of +-25.2 degree.
- 2D bounding box labels in the camera images.
- The camera labels are tight-fitting, axis-aligned 2D bounding boxes with globally unique tracking IDs.
- The bounding boxes cover only the visible parts of the objects.
- The following objects have 2D labels: vehicles, pedestrians, cyclists.
- Waymo do not provide object track correspondences across cameras.
- Trains and trams are not considered vehicles and are not labeled. Motorcycles and motorcyclists are labeled as vehicles.

모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것