서보모터 (Servo motor)
Close-loop System (피드백 O)
물체의 위치, 방위, 자세, 회전 속도 등을 제어량으로 하고 목표치의 변화에 뒤따르도록 구성된 자동제어계를 서보기구라고 하는데 Encoder (피드백 회로) 가 출력의 검출부, 목표치와의 오차 증폭부, 조작부,제어 대상 등으로 피드백이 구성됨 ⇒ 이러한 서보계의 조작부에 사용되는 것 = 서보모터
*AC, DC 모두 서보모터가 있음
속도가 증가시 토크가 떨어지지 않고 관성으로 회전
⇒ 정확한 위치 및 속도 제어 힘듬 (돈으로 해결 가능)
⇒ Encoder 를 모터 뒤에 달아 회전수 알 수 있음
⇒ Encoder 로 인하여 Pulse 출력 (모터가 몇회전했는지 축이 몇도에 있는지 알 수 있음)
⇒ Encoder 에서 인풋으로 해당 값들을 보내 회전 값 보충 가능
스텝모터 (Stepping Motor)
Open-loop System (피드백 X)
펄스로 인해 동작, Resolution(분해능)에 따라 다름 (비례)
*DC 중 BLDC (Brushless) 구조를 가진 모터로 한 바퀴의 회전을 많은 수의 스텝들로 어떤 피드백 장치 없이도 정확하게 조절이 가능함
펄스로 인한 동작
⇒ 회전 제어가 쉬워짐 (정해진 단위만큼만 움직임)
⇒ 그러나 토크가 작음 ⇒ 회전력이 약함
⇒ 탈조현상 우려 (모터의 속도는 빠른데 회전력이 약하면 모터가 기구에 영향을 주지 못하고 멈춤)
볼 스크류
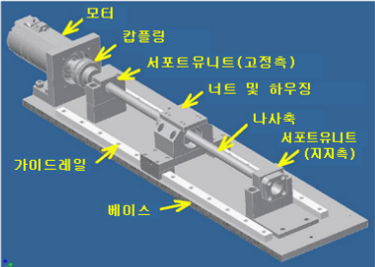
회전 운동을 직선 운동으로 변환하는 기계 요소
볼 스크류는 축 방향만의 부하 하중을 받아 회전 운동을 직선 운동으로 변환하는 기계 요소이다
⇒ 이게 무슨 뜻이냐면 볼 스크류가 수직 하중이나 모멘트 하중을 지탱하는 역할을 하면 안되며 ( 가이드 레일의 존재 이유 )
즉 정리해보자면 모터의 회전 운동을 직선 운동으로 바꿔주는 기계 요소가 볼 스크류이며 직선 운동하는 과정에서 너트 및 하우징을 매개하여 나사축(직선 운동 방향) 으로 축 방향 하중이 가해진다. 그럼 하중을 지지해주는 기계 요소가 필요한데 이 역할을 볼 스크류가 하면 안된다

많은 도움이 되었습니다, 감사합니다.