LiDAR 3D object detection
1.[Paper Review] VoxelNet: End-to-end Learning for Point Cloud Based 3D Object Detection
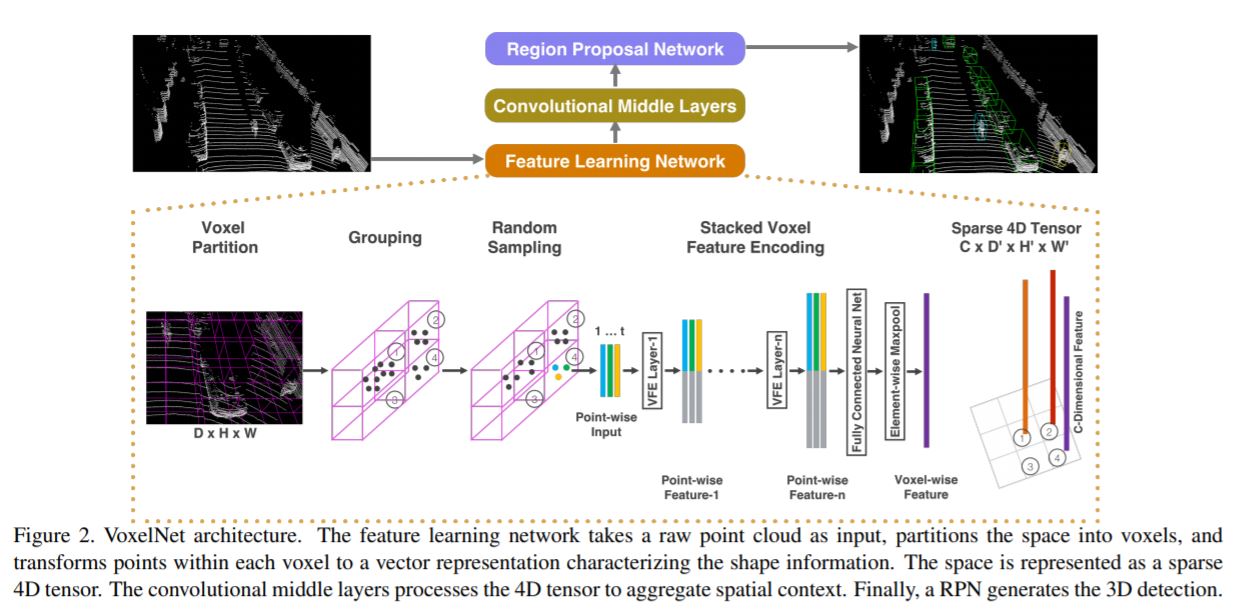
오늘 정리할 논문은 CVPR 2017에서 발표되었던 LiDAR기반의 3D object detection 분야의 대표 논문 중 하나인 VoxelNet: End-to-end Learning for Point Cloud Based 3D Object Detection입니다.
2020년 11월 2일
2.[Paper Review] PointRCNN: : 3D Object Proposal Generation and Detection from Point Cloud
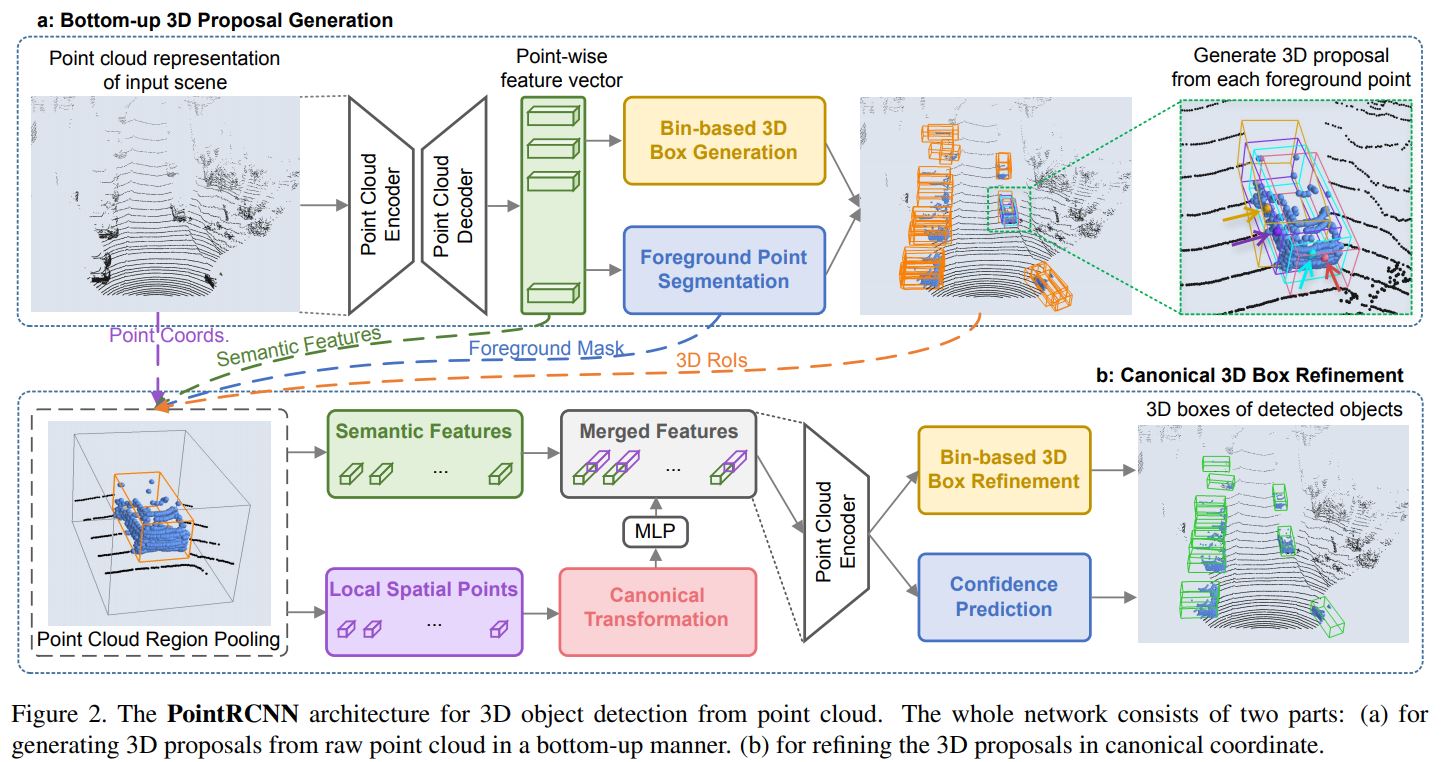
두 번째로 다룰 3D object detection 논문은 CVPR 2019에 나왔던 PointRCNN입니다. 첫 번째로 다루었던 VoxelNet이 1-stage였던 것에 반해 PointRCNN은 대표적인 2-stage detector입니다.
2020년 11월 29일
3.[Paper Review] LaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving - Part. 1
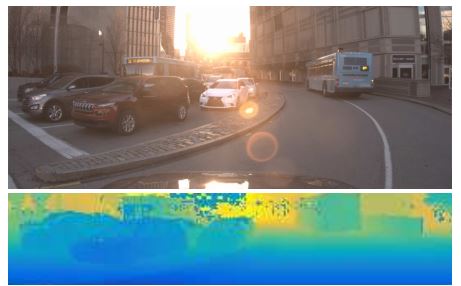
오늘 정리해볼 논문은 CVPR 2019에 나왔던 LaserNet입니다. Range Image 기반 방법론이라는 점에서 정리할 필요성이 있다고 생각하여 선정하게 되었습니다.
2021년 2월 14일
4.[Paper Review] LaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving - Part. 2
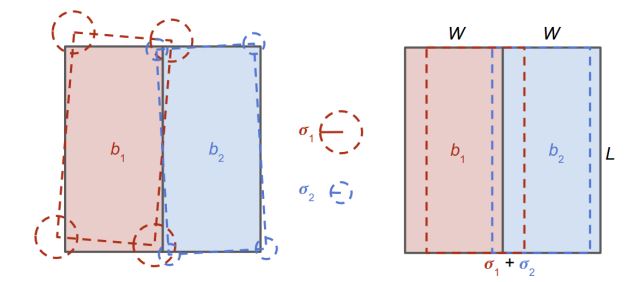
Lasernet Part2입니다. uncertainty의 개념과 함께 Probabilistic detector로서의 요소를 중심으로 정리합니다.
2021년 3월 1일