논문링크 : Link Prediction Based on Graph Neural Networks
1. 선택하게 된 이유
: GNN을 공부하다보니 Link Prediction에 대한 내용이 많이 나오고 그에 따른 유명한 논문을 찾아보다 보게 됐습니다.
2. 서론
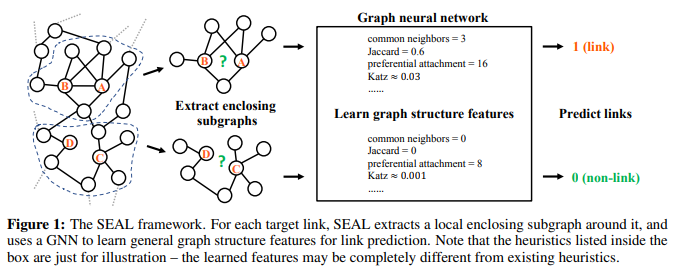
- 각각의 target link 주변의 local subgraph를 추출하므로써 subgraph의 패턴을 link existence에 맵핑하는 함수를 학습할 수 있다.
- 그러므로, 자동적으로 현재 network에 맞는 휴리스틱을 학습한다.
- Link Prediction은 network의 두 노드들이 link를 가질 수 있는지 아닌지를 예측하는 것이다.
- 휴리스틱 방법들은 links에 대한 가능성을 나타내는 몇몇의 heuristic node similarity scores를 계산한다.
- 하지만, 모든 휴리스틱은 두 노드들이 link되어 있을 것이라는 중요한 가정이 필요하다.
- 그래서 주어진 network에서 적절한 휴리스틱을 학습하는 것이 합리적인 방법이다.
- 사실은 heuristics는 graph structure features에 속한다.
왜 속하는지 아직 이해하지 못했다. - heuristics는 predefined graph structure feature로 볼 수 있기 때문에, 위에서 휴리스틱이 자동적으로 학습했던 것처럼. network에서 graph structure feature을 학습할 수 있다고 볼 수 있다.
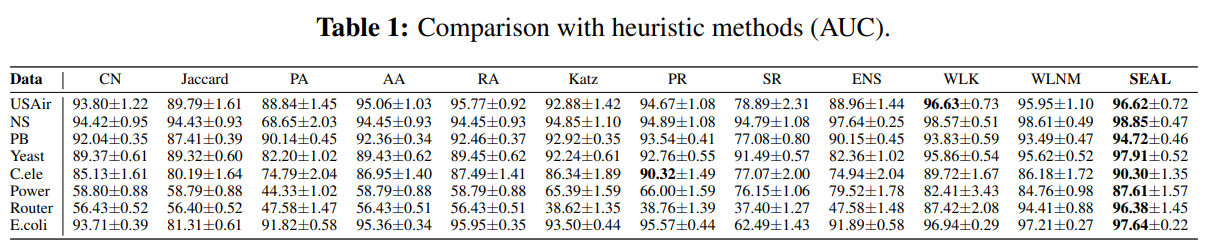
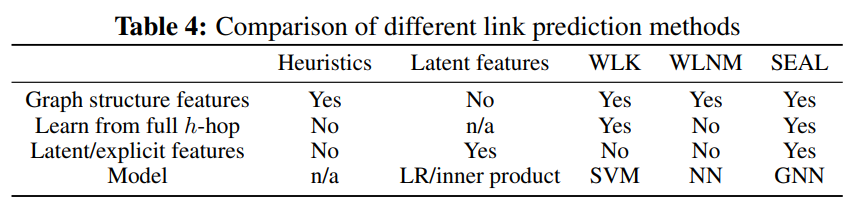
- 이 논문 이전의 link prediction performance에서 state-of-the-art은 WLNM이다.
- WLNM은 어떤 enclosing subgraphs이 link existence에 해당하는지를 학습하는 FCN(full-connected neural network)를 사용한다.
- 그리고,학습데이터로 사용할 links 주변의 local enclosing subgraphs를 추출한다.
- enclosing subgraph는 에 따라 의 이웃의 집단에 의해 유도된 subgraph이다.
앞으로는 heuristics를 graph structure feature로 해석해야 자연스러울 것입니다.
- high-order 휴리스틱일수록 효과적이지만, 시간과 메모리를 감당하기 힘들다.
- 하지만, -decaying 이론을 통해서 단일화되어서 낮은 값으로도 high-order feature를 학습할 수 있다.
- SEAL은 local enclosing subgraphs의 그래프 구조를 학습한다.
여기서 local한 enclosing subgraphs를 학습 데이터로 사용할 수 있는 이유는-decaying이론으로 정당화된다. - 그리고, SEAL은 위에서 설명한 WLNM 기법에서 크게 2가지를 변형해서 만들었다.
- FCN(full-connected neural network)을 GNN으로 대체했다.
- Subgraph 구조 뿐 아니라 노드 feature도 학습한다.
Preliminaries
1. Notations
Let be an undirected graph, where is the set of vertices and is the set of observed links
adjacency matrix , where if and otherwise
any nodes , let be the 1-hop neighbors of
be the shortest path distance between and .
walk is a sequence of nodes with .
is the length of the walk , which is here.
2. Latent features and explicit features1) Latent features methods는 각가의 노드에 대한 낮은 차원의 latent representation/embedding을 학습하기 위해 network의 matrix representations를 인수분해(factorize)한다.
2) Explicit features은 각 노드들에 대한 모든 형태의 side information를 node atrributes의 형태로 이용할 수 있다.3. Graph neural networks
GNN은 크게 2가지 종류의 층으로 이루어져 있다.1) graph convolution layers : 각각의 노드들에 대해 local substructure features를 추출한다.
2) graph aggregation layer : node-level features을 graph-evel feature vector로 종합한다.많은 graph convolution layers은 message passing framework로 단일화된다.
4. Supervised heuristic learning
supervised heuristics를 학습하려했던 시도들은 3가지 한계점을 가지고 있었다.1) FCN(full-connected network)는 오직 fixed-size tensors만 input으로 허용하기 때문에, WLNM은 다양한 subgraphs을 같은 크기로 truncating 해야한다.
2) adjacency matrix representations의 한계 때문에, WLNM은 latent or explicit features를 학습할 수 없었다.
3) 이론적 정당화(like -decaying 이론)가 존재하지 않았다.
3. 방법론 (a) : A theory for unifying link prediction heuristics
- 이제는 다양한 link prediction heuristics의 뒤의 메커니즘을 깊게 이해해볼 것이다.
- 그렇게, local subgraphs로부터 휴리스틱을 학습하는 방법을 영감받을 것이다.
여기서 local이라는 점은 굉장히 중요하다.
Definition 1 (Enclosing subgraph)
- graph , given two nodes
- the -hop enclosing subgraph for is the subgraph
- 의 노드들은 or 를 만족한다.
Theorem 1 Any -order heuristic for can be accurately calculated from
- 왜냐하면, 가 -order heuristic for 를 모두 포함하기 때문이다.
- 앞으로의 분석을 통해 high-order heuristics을 낮은 로 실행할 수 있다.
- 그리고, certain conditions에서 -decaying 휴리스틱은 h-hop enclosing subgraph에서 잘 근사될 수 있다.
- 또한, 잘 알려진 휴리스틱도 -decaying 휴리스틱 framwork에 의해 단일화될 수 있다.
Definition 2 (-decaying heuristic)
Equation 1
- 은 0~1사이의 값을 가지는 decaying factor
- 은 positive constant 혹은 최대값이 상수로 제한되는 의 positive function
- 는 의 nonnegative function
Theorem 2 Given a -decaying heuristic , if satisfies
- (property 1) where \lambda < \1/\r
- (property 2) is calculable from for , where with and
- 이를 만족할 경우, 는 로부터 근사될 수 있다.
Proof -decaying heuristic을 그것의 첫 까지 합으로 근사할 수 있다.
Equation 2
- 근사 오류의 상한선은
- 작은 와 큰 일수록 decreasing speed가 더 빠르다.
Lemma 1 Any walk between and with length is include in
proof and 라 가정했을 때, 이므로 모순
- 따라서 와 는 모두 보다 작거나 같다. 따라서 모든 는 에 포함되어 있다.
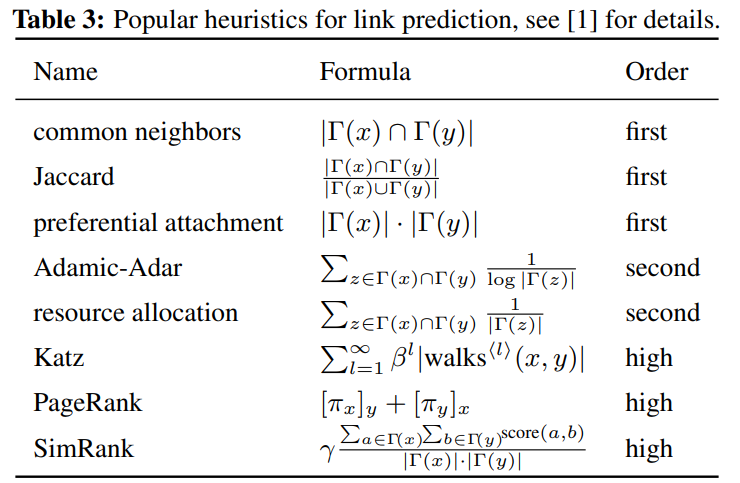
- 앞으로 3가지의 유명한 high-order 휴리스틱을 분석할 것이다.
3-1. Katz index
Equation 3
- 은 부터 까지의 길이 의 walk의 집합이다.
- 은 adjacency matrix의 번 거듭제곱한 것이다.
- 사이의 길이가 인 모든 walks의 모음을 통한 Katz index 합은 (0 < < 1)를 통해서 짧은 walks에 더 가중치를 부여해서 완하된다.
- Katz index는 에서 , , 를 사용한 것이다.
- Lemma1를 통해서 이고, ''을 만족하기 때문에, 인 a,b를 잘 고르면 (property 2)를 만족한다.
이 부분 이해하는게 힘들었다. 변수들이 생겨나고 결정되는 선후관계를 잘 고려해보길 바란다.
Proposition 1. 모든 에 대해서 의 상한선이 이다. 여기서 는 최대 인접한 노드의 개수(degree)이다.
proof
- 수학적 귀납법으로 증명하자면, 일때, 모든 에 대해서 만족한다.
- 일 때 가능하다고 모든 라고 가정했을 때,
i부터 j까지 l+1 길이로 도착하는 edge가 존재하는지에 대한 배열이 A이다. 위 식을 통해서는 l까지 j의 직전 노드(k)까지의 edge 정보에 k부터 j까지의 edge 정보를 반영해서 최종 edge에 대한 배열을 0과 1로 표현하는 배열
이 부분을 이해하는게 상당히 힘들었다.
나는 d는 i부터 j까지 l+1의 길이로 갈 수 있는 최대 경우의 수(모두 갈 수 있다고 가정했을 때의 최대 인접한 노드의 개수)로 이해했다.
- 이를 통해, 일 때도 가능하다는 것을 알 수 있으므로 참이다.
- 일 때, 만 만족하면 (property 1)를 만족한다. 근데, 는 5E-4와 같은 작은 수 이기 때문에, Katz는 -hop enclosing subgraph로부터 잘 근사할 수 있다.
3-2. PageRank
- 노드 에 대한 PageRank는 부터 random walker의 정적 분포(stationary distribution)를 계산한다.
정적분포 : 마르코프 체인(현재상태가 미래상태에 영향을 미치는 확률 모델)에서 쓰이는 개념. 정적분포를 만족하는 벡터는를 만족한다. 여기서는 P는 전이 확률 분포를 의미한다. - 쉽게 말해, 현재 위치부터 의 확률로 랜덤으로 이웃으로 움직이거나, 의 확률로 로 return하는 것을 말한다.
- 는 stationary distribution vector(정적 분포 벡터)이고, 는 node 로 random walker할 확률이다.
Equation 4
- 는 전이 행렬이고, 만약 이면, 이고, 그렇지 않다면, 이다.
- 는 의 원소는 1을 가지고, 아닌 것은 0을 가지는 벡터다.
- the inverse P-distance theory를 통해서 PageRank의 기반이 -decaying 휴리스틱임을 보일 것이다.
Equation 5
- ,
- 는 이다.
즉, w를 지나면서 해당 edge를 타고갈 확률의 곱Equation 6
- 라고 할 때, 은 로부터 모든 노드로 갈 확률들의 합이므로 최대 1을 넘을 수 없고, 이는 를 만족한다.( )
- 따라서, (property 1) 만족한다.
- Lemma 1에 의해 (property 2)도 만족한다.
3-3. SimRank
- SimRank score는 만약 두 노드 각각의 이웃들이 비슷하다면 두 노드는 비슷할 것이다라는 직관에서 시작한다.
Equation 7
- 는 0~1 사이의 값을 가진다.
코사인 유사도 수식과 유사하다.Equation 8
- 는 all simultaneous walks를 의미한다. 하나의 walk은 x에서 시작하고, 다른 walk은 y에서 시작한다.
- 그리고, 처음 만나느 어떤 vertex가 이다.
- 는 이다.
각각의 노드의 edge 개수 중 하나씩을 고를 확률 - 확률이니까 이어서 (property 1)을 만족한다.
- 서로 이웃 탐방하다가 만나는 거니까 양쪽 시작하여 기존 방식들과 달리 절반이 되어 이다.
- 따라서, (property 2)도 만족한다.
Discussion
- -decaying 휴리스틱으로 적은 근사오류로 근사가 가능하고 이는 획기적이다. 이를 통해 local enclosing subgrpah는 충분한 정보를 가지고 있음을 알 수 있다.
4. 방법론 (b) : SEAL : An implemetation of the theory using GNN
- SEAL은 -decaying 휴리스틱과 같은 특별한 형태의 features를 학습하는 것이 아니라, general graph structure feature를 학습한다.
- 이는 3가지 단계를 포함하고 있다.
- sampled positive links (observed)와 sampled negative links (unobserved)를 위한 enclosing subgraph extraction
- node information matrix construction
- GNN learning
- GNN은 전형적으로 를 input으로 가지고, (with slight abuse of notation) 는 adjacency matrix이고, 는 node information matrix이다.
- node information matrix은 3가지 components를 가진다. 1) structural node labels, 2) node embeddings, 3) node attributes
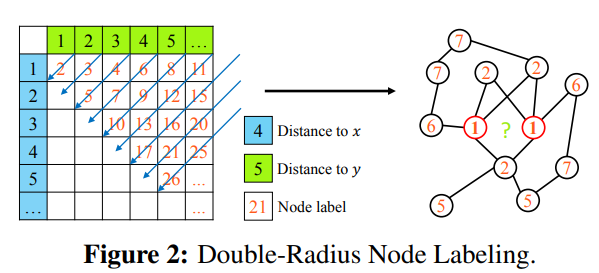
4-1. Node labeling
- node labeling function 은 enclosing subgraph의 모든 노드 i를 integer label 에 할당한다.
- labeling을 하는 목적은 노드들의 다른 역할에 다른 labels를 사용하기 위해서이다.
- 만약, labeling을 하지 않는다면, 어디가 target인지 GNN이 알 수 없다.
- 그래서 다음과 같이 크게 두가지로 labeling을 진행한다.
- The two target nodes 와 는 항상 distinctive label "1"를 가진다.
- 만약 이고 이면, node 와 에는 같은 label를 부여한다.
1) 만약 이면,
2) 만약 이면, . (이는 기하학적으로 distance를 비교한 것이다.)
- 이런 labeling을 통해서 노드들의 상대적인 position과 structural importance도 반영한다.
- or 이면 null label 0을 부여한다. 이렇게 하는 것이 안하는 것보다 성능이 좋았다.
- labeling 후에는 one-hot 인코딩을 진행하여, 를 만든다.
Appendix B. More discussion about node labeling
- enclosing subgraphs는 본질적으로 방향성을 가지고 있다.
- node labeling 알고리즘은 DRNL 알고리즘을 적용한다.
- node labeling은 structual information을 더해준다.
- 또한, 노드들의 상대적 위치들과 center로부터 그들의 distance를 반영한다.
- 하지만, 크기 infromation은 one-hot encoding 이후 사라지기 때문에, node labels의 one-hot encoding에서는 이용할 수 없다.
- 그래도, 그런 labeling은 node labels이 training으로 directly하게 사용될 때나 node를 rank를 매길 때, potentially useful하다.
- 를 계산할 때, 일시적으로 를 지운다. ( 를 타고 distance가 달라질 수 있기 때문이다.)
- SEAL의 node labels은 WLNM에 비해서 별로 정밀하지 않아도 된다.
4-2. Incorporating latent and explicit features
- node information matrix 는 latent and explicit features를 포함하고 있다.
- network 에서 sampled positive training links 라고 하고 sampled negative training links 이라고 하자.
- 근데, 그렇게 설정을 하고 를 노드 임베딩하면, 의 정보를 가지고 있어서, GNN이 link existence information을 빨리 찾아내고 거기에 최적화를 해버린다.
- 이는 에 치우쳐진 일반화가 되기 때문에, 문제가 된다.
- 그래서 으로 노드 임베딩을 진행한다.
Appendix E. Configuration details of SEAL
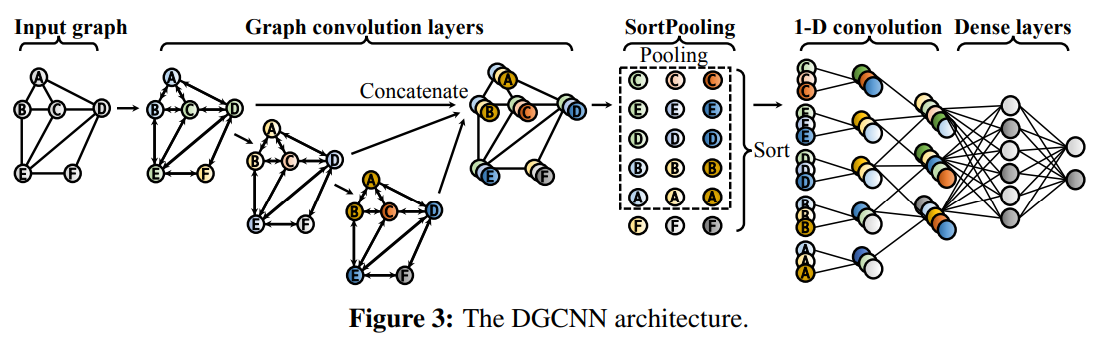
- 이 논문에서는 GNN으로 DGCNN을 사용했다.
- DGCNN은 propagation(전파) 기반의 graph convolution layers과 새로운 graph aggragation(집계) layer인 SortPooling으로 이루어져 있다.
해당 노드 자신에 대해서는 edge가 없으니 추가해주기. 자기 자신으로 향할 수 있다는 확률을 추가해주는 듯. 혹은, edge가 없는 노드일 수 있음을 방지하는 조치인 것 같다.
각 노드에 연결된 edge를 모두 총합해서 대각행렬에 위치시킨다.- 는 학습가능한 graph convolution parameters
- 는 비선형 활성화 함수이다.
- 위 식을 해석하자면, 를 곱하므로써 linear transformation을 적용하고, propagation matrix 를 통해서, 이웃 노드들에게 전파한다.
은 구해지는 과정을 보면, 0~1의 값을 가지게 되고, 이를 조금더 깊게 이해하면, 특정 edge 중 그 edge로 갈 확률을 내포하고 있다고 해석할 수 있다.
해당 노드의 특징과 주변 노드의 특징들에 가중치를 부여하고 평균을 내서 살릴 특징을 정하고, 비선형 활성화 함수를 통과하여 노드 i에 대한 새로운 노드 상태로 update를 한다.
- 위 식은 node information과 노드 의 이웃으로부터 first-order structure pattern를 요약한다.
- GNN 층을 거친 후, 그저 더해버리면 노드 각가의 정보가 상당히 없어질 수 있기 때문에, max- Pooling 을 사용한다.
- max- Pooling은 sorted representations의 sizes를 unify한다.
DGCNN은 4개의 층으로 이루어져 있다.1) 32,32,32,1 channels
2) SortPooling layer
3) two 1-D convolution layers (16 and 32 output channels)
4) dense layer (128 neurons) - graph classification model에 input으로 넣기 전에, 두 target nodes 사이의 edge를 제거한다. 왜냐하면, edge가 link existence information를 포함할 수 있기 때문이다.
5. 주요 결과
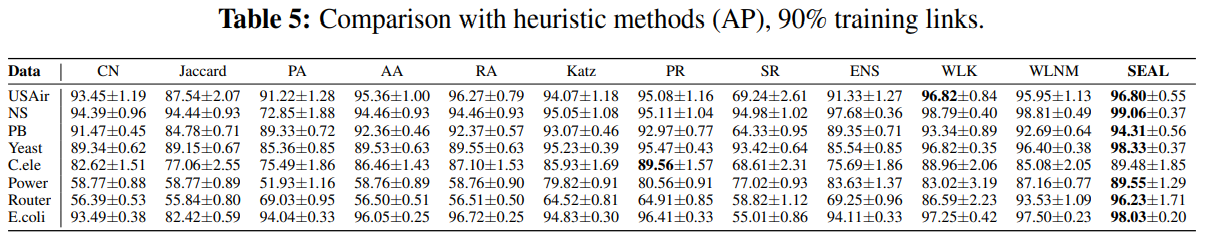
-
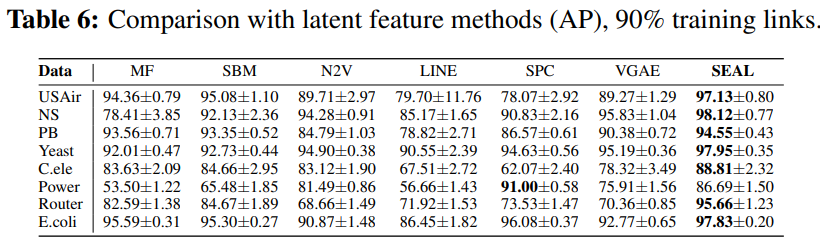
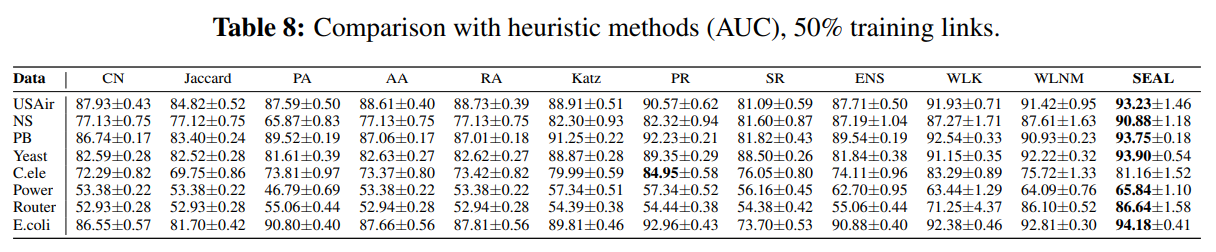
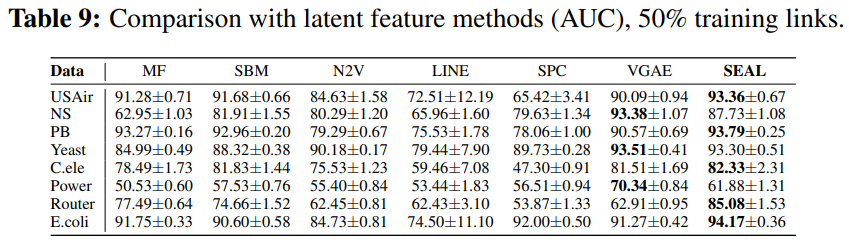
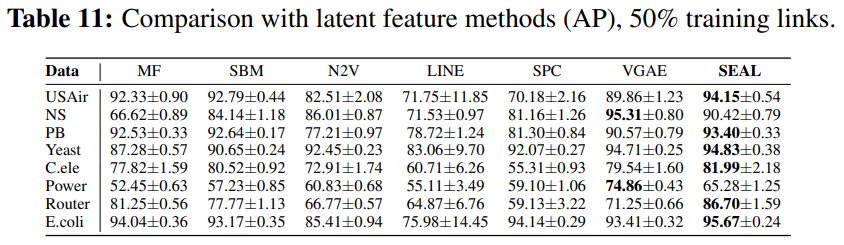
SEAL는 link prediction 부분에서 뛰어나고 robust한 framework임을 결과를 통해 알 수 있다.
-
그리고 Appendix E에서 알 수 있듯이, SEAL은 어떤 GNN이나 node embedding 기술을 사용해도 된다는 장점이 있다.
-
(Table 1)을 통해서 learned 'heuristics'가 더 잘 notwork properties를 찾아내는 것을 알 수 있다.
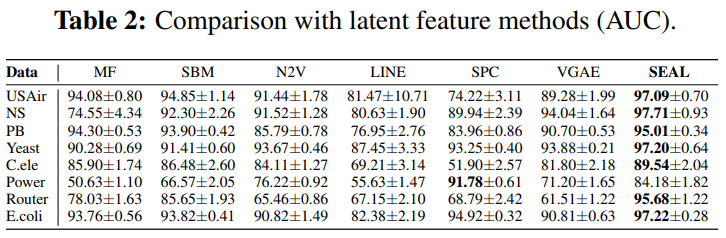
-
(Table 2)를 통해서 large margin의 순수한 node2vec 임베딩보다 SEAL과 함께한 node2vec 임베딩의 성능이 더 좋았다.
-
(Table 1)과 (Table 2)를 비교해보면, (Table 2)가 더 높은 부분도 있음을 통해, joint learning이 항상 성능은 높이는 것은 아니라는 것을 알 수 있다.



6. Comment
: GNN 관련 논문을 읽을수록 자주 등장하는 adjacency matrix과 같은 표현들이 눈에 익으니, 이해하는 속도가 붙고 더 깊게 이해할 수 있는 것 같아서 기분이 좋았습니다. GNN의 input으로 subgraph를 넣는 것이 당연하고만 생각했지 왜? entire graph가 아니라 subgraph를 사용하지?라는 의문을 가지지 못한 자신을 반성할 수 있게 되었습니다.
더 자세한 내용은 논문 원본을 참고하시기 바랍니다.
개인의 주관이 반영된 해석이라 논문의 의도와 다를 수 있습니다.
오류가 있다면 댓글로 알려주시면 감사하겠습니다!