Intro
캐글의 항공 사진 내 선인장 식별 경진대회 'Aerial Cactus Identification' compeition에 참가해 딥러닝 모델을 다루는 방법을 연습해 보았다.
드론이 보호 구역을 돌아다니며 찍은 항공사진에서 딥러닝 기술로 선인장을 식별하는 작업을 해내야 한다.
csv파일 뿐 아니라 이미지 파일 또한 활용해 이미지 데이터에 선인장이 있을 확률을 예측해야 한다.
EDA
데이터 둘러보기
-
데이터를 불러와 살펴본다.
import pandas as pd # 데이터 경로 data_path = '/kaggle/input/aerial-cactus-identification/' labels = pd.read_csv(data_path + 'train.csv') submission = pd.read_csv(data_path + 'sample_submission.csv')labels.head()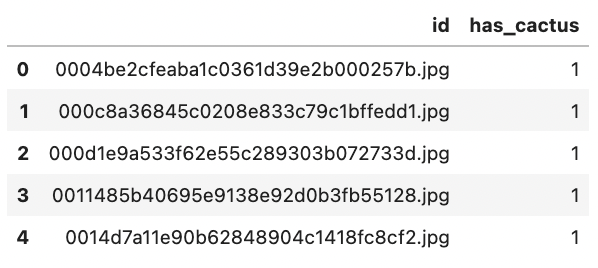
- 이미지의 파일명과 선인장을 포함하는지 여부가 담겨있다.
데이터 시각화
-
타깃값 분포
-
파이그래프로 타깃값 분포를 살펴보면 1:3정도의 비율을 갖는 것을 알 수 있다.
import matplotlib as mpl import matplotlib.pyplot as plt %matplotlib inline mpl.rc('font', size=15) plt.figure(figsize=(7, 7)) label = ['Has cactus', 'Hasn\'t cactus'] # 타깃값 레이블 # 타깃값 분포 파이 그래프 plt.pie(labels['has_cactus'].value_counts(), labels=label, autopct='%.1f%%');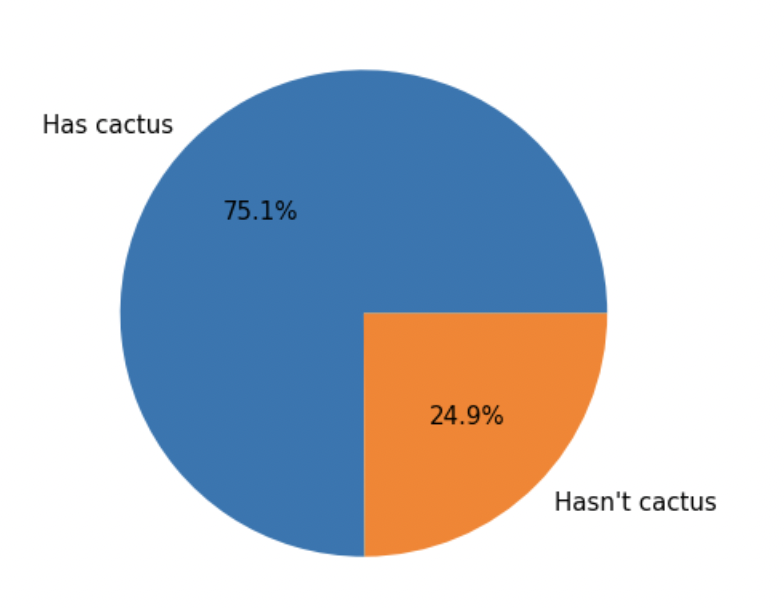
-
-
이미지 출력
-
ZipFile 클래스를 활용해 압축파일을 푼다.
from zipfile import ZipFile # 훈련 이미지 데이터 압축 풀기 with ZipFile(data_path + 'train.zip') as zipper: zipper.extractall() # 테스트 이미지 데이터 압축 풀기 with ZipFile(data_path + 'test.zip') as zipper: zipper.extractall() -
os.listdr()로 디렉터리에 파일이 몇개나 들어있는지 알아본다.
import os num_train = len(os.listdir('train/')) num_test = len(os.listdir('test/')) print(f'훈련 데이터 개수: {num_train}') print(f'테스트 데이터 개수: {num_test}')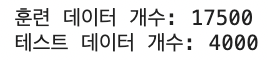
-
OpenCV 라이브러리로 선인장을 포함하는 이미지 파일을 읽어온다. 길쭉한 물체인 선인장을 볼 수 있다.
import matplotlib.gridspec as gridspec import cv2 # OpenCV 라이브러리 임포트 mpl.rc('font', size=7) plt.figure(figsize=(15, 6)) # 전체 Figure 크기 설정 grid = gridspec.GridSpec(2, 6) # 서브플롯 배치(2행 6열로 출력) # 선인장을 포함하는 이미지 파일명(마지막 12개) last_has_cactus_img_name = labels[labels['has_cactus']==1]['id'][-12:] # 이미지 출력 for idx, img_name in enumerate(last_has_cactus_img_name): img_path = 'train/' + img_name # 이미지 파일 경로 image = cv2.imread(img_path) # 이미지 파일 읽기 image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) # 이미지 색상 보정 ax = plt.subplot(grid[idx]) ax.imshow(image) # 이미지 출력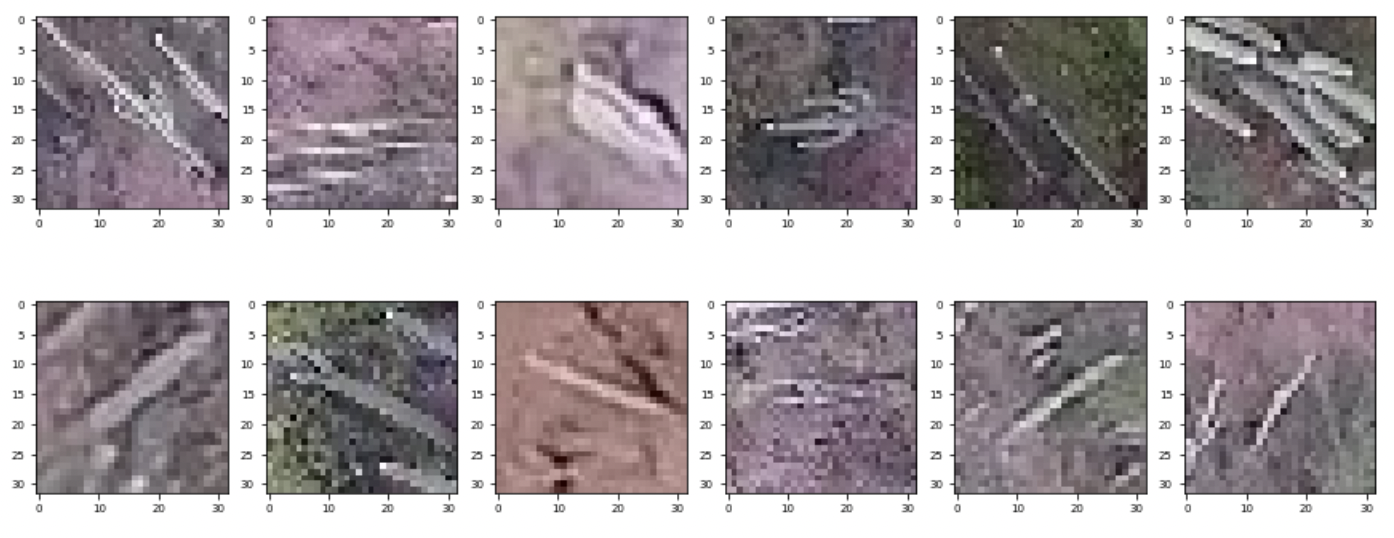
-
선인장을 포함하지 않는 이미지또한 불러와 형태를 살펴본다.
plt.figure(figsize=(15, 6)) # 전체 Figure 크기 설정 grid = gridspec.GridSpec(2, 6) # 서브플롯 배치 # 선인장을 포함하지 않는 이미지 파일명(마지막 12개) last_hasnt_cactus_img_name = labels[labels['has_cactus']==0]['id'][-12:] # 이미지 출력 for idx, img_name in enumerate(last_hasnt_cactus_img_name): img_path = 'train/' + img_name # 이미지 파일 경로 image = cv2.imread(img_path) # 이미지 파일 읽기 image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) # 이미지 색상 보정 ax = plt.subplot(grid[idx]) ax.imshow(image) # 이미지 출력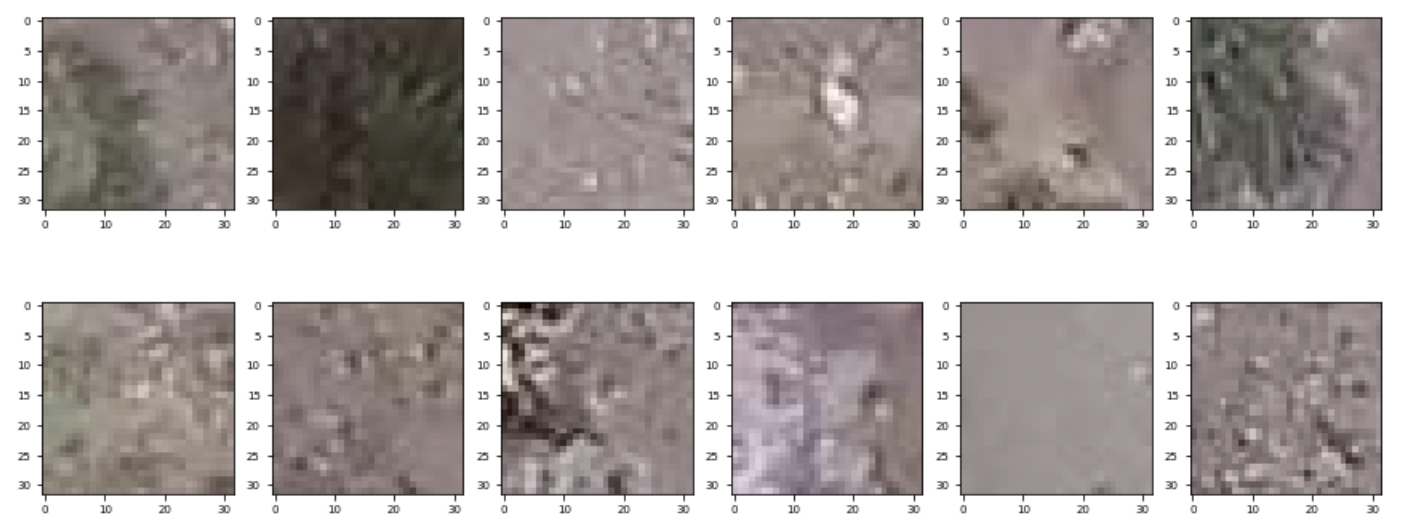
-
image.shpae()으로 이미지 형상을 출력해보면 (32,32,3)의 결과를 얻을 수 있는데, 가로, 세로 크기가 32 x 32, 채널 수가 3개인 것을 알 수 있다. R,G,B로 이루어진 컬러 이미지이기에 채널이 3개이다.
-
Baseline Model
시드값 고정 및 GPU 장비 설정 -> 데이터 준비 (훈련/검증 데이터 분리, 데이터셋 클래스 정의, 데이터셋 생성, 데이터 로더 생성) -> 모델 생성 -> 모델 훈련 (손실함수, 옵티마이저 설정, 모델 훈련) -> 성능 검증 -> 예측 및 제출
의 순서로 진행한다.
시드값 고정 및 GPU 장비 설정
-
pytorch를 import하고 시드값을 고정한다. 머신러닝에서의 random_state와 같은 역할로, pytorch 딥러닝 모델링에서는 맨 처음에 고정한다.
- 결과를 재현할 필요가 없다면 시드값 고장은 생략하는게 좋을 수 있는데, 속도가 느려지고 예측 성능도 떨어질 수 있기 때문이다.
import torch # 파이토치 import random import numpy as np import os # 시드값 고정 seed = 50 os.environ['PYTHONHASHSEED'] = str(seed) random.seed(seed) # 파이썬 난수 생성기 시드 고정 np.random.seed(seed) # 넘파이 난수 생성기 시드 고정 torch.manual_seed(seed) # 파이토치 난수 생성기 시드 고정 (CPU 사용 시) torch.cuda.manual_seed(seed) # 파이토치 난수 생성기 시드 고정 (GPU 사용 시) torch.cuda.manual_seed_all(seed) # 파이토치 난수 생성기 시드 고정 (멀티GPU 사용 시) torch.backends.cudnn.deterministic = True # 확정적 연산 사용 torch.backends.cudnn.benchmark = False # 벤치마크 기능 해제 torch.backends.cudnn.enabled = False # cudnn 사용 해제 -
GPU 장비 설정
데이터 준비
-
훈련, 검증 데이터 분리
from sklearn.model_selection import train_test_split # 훈련 데이터, 검증 데이터 분리 train, valid = train_test_split(labels, test_size=0.1, stratify=labels['has_cactus'], random_state=50)- train_test_split()을 이용해 훈련, 검증 데이터를 분리한다.
-
데이터셋 클래스 정의
import cv2 # OpenCV 라이브러리 from torch.utils.data import Dataset # 데이터 생성을 위한 클래스 class ImageDataset(Dataset): # 초기화 메서드(생성자) def __init__(self, df, img_dir='./', transform=None): super().__init__() # 상속받은 Dataset의 생성자 호출 # 전달받은 인수들 저장 self.df = df self.img_dir = img_dir self.transform = transform # 데이터셋 크기 반환 메서드 def __len__(self): return len(self.df) # 인덱스(idx)에 해당하는 데이터 반환 메서드 def __getitem__(self, idx): img_id = self.df.iloc[idx, 0] # 이미지 ID img_path = self.img_dir + img_id # 이미지 파일 경로 image = cv2.imread(img_path) # 이미지 파일 읽기 image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) # 이미지 색상 보정 label = self.df.iloc[idx, 1] # 이미지 레이블(타깃값) if self.transform is not None: image = self.transform(image) # 변환기가 있다면 이미지 변환 return image, label- Dataset 클래스를 활용해 데이터셋 객체를 만든다. 데이터셋의 크기를 반환하는 메서드와 인덱스에 해당하는 데이터를 반환해주는 메서드를 만들어준다.
-
데이터셋 생성
-
ImageDataset 클래스를 이용해 데이터셋을 만드는데, pytorch 모델로 이미지를 다루려면 이미지 데이터를 Tensor 타입으로 바꾸어야 한다.
from torchvision import transforms # 이미지 변환을 위한 모듈 transform = transforms.ToTensor()- torchvision은 pytorch용 CV 라이브러리이고, transforms는 다양한 이미지 변환기를 제공하는 모듈이다.
- 이미지를 Teonsor로 바꾸면 (가로 픽셀 수, 세로 픽셀 수, 채널 수)의 형태가 (채널 수, 가로 픽셀 수, 세로 픽셀 수)로 변한다. 배치가 추가되면 맨 앞에 배치 크기가 들어간다.
-
앞에서 정의한 ImageDataset() 클래스를 사용해 훈련, 검증 데이터셋을 만든다.
dataset_train = ImageDataset(df=train, img_dir='train/', transform=transform) dataset_valid = ImageDataset(df=valid, img_dir='train/', transform=transform)- df 파라미터에 데이터를 전달하고, img_dir에 이미지 데이터의 경로, transform에는 방금 만든 transform 변환기를 전달한다.
-
-
데이터 로더 생성
-
데이터 로더는 지정한 배치 크기만큼 데이터를 불러오는 개체로, 딥러닝 모델을 훈련할 때는 주로 배치 단위로 데이터를 가져와 훈련한다.
from torch.utils.data import DataLoader # 데이터 로더 클래스 loader_train = DataLoader(dataset=dataset_train, batch_size=32, shuffle=True) loader_valid = DataLoader(dataset=dataset_valid, batch_size=32, shuffle=False)- 배치 크기는 2의 제곱수로 설정하는게 효율적이다. 배치 크기가 작으면 규제 효과가 있어 일반화 성능이 좋아지지만 훈련 시간이 길어진다.
-
모델 생성
-
CNN(합성곱 신경망) 모델을 만드는데, nn.Module을 상속해 정의하고 순전파 후 결과를 반환하는 forward()를 재정의한다.
import torch.nn as nn # 신경망 모듈 import torch.nn.functional as F # 신경망 모듈에서 자주 사용되는 함수 class Model(nn.Module): # 신경망 계층 정의 def __init__(self): super().__init__() # 상속받은 nn.Module의 __init__() 메서드 호출 # 첫 번째 합성곱 계층 self.conv1 = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=3, padding=2) # 두 번째 합성곱 계층 self.conv2 = nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, padding=2) # 최대 풀링 계층 self.max_pool = nn.MaxPool2d(kernel_size=2) # 평균 풀링 계층 self.avg_pool = nn.AvgPool2d(kernel_size=2) # 전결합 계층 self.fc = nn.Linear(in_features=64 * 4 * 4, out_features=2) # 순전파 출력 정의 def forward(self, x): x = self.max_pool(F.relu(self.conv1(x))) x = self.max_pool(F.relu(self.conv2(x))) x = self.avg_pool(x) x = x.view(-1, 64 * 4 * 4) # 평탄화 x = self.fc(x) return x- __init__()에서 모델에서 쓸 신경망 계층을 정의하고 forward()에서 조합해 모델을 완성한다.
- nn.Conv2D()로 합성곱 계층을 만들 때 stride를 명시하지 않으면 기본값인 1이 사용되고, 입력 채널 수는 앞 계층의 출력 채널 수와 같아야 한다.
- 풀링 계층에서는 stride를 명시하지 않으면 stride 크기와 풀링 크기가 동일하게 설정된다.
-
정의한 Model 클래스로 CNN 모델을 생성하여 device 장비에 할당해주고, model을 출력하면 모델의 전체 구조를 볼 수 있다.
model = Model().to(device) model
모델 훈련
-
손실 함수로 CrossEntropy를 설정해준다.
# 손실함수 criterion = nn.CrossEntropyLoss() -
최적 가중치를 찾아주는 옵티마이저로는 SGD를 사용해준다.
# 옵티마이저 optimizer = torch.optim.SGD(model.parameters(), lr=0.01) -
모델 훈련 절차
- 데이터 로더에서 배치 크기만큼 데이터를 불러온다.
- 불러온 이미지 데이터와 레이블(타깃값) 데이터를 장비에 할당한다.
- 옵티마이저 내 기울기를 초기화한다.
- 신경망 모델에 입력 데이터(이미지)를 전달해 순전파하여 출력값(예측값)을 구한다.
- 예측값과 실제 레이블(타깃값)을 비교해 손실을 계산한다.
- 손실을 기반으로 역전파를 수행한다.
- 역전파로 구한 기울기를 활용해 가중치를 갱신한다.
- 1~7 절차를 반복횟수만큼 되풀이한다.
- 1~8 절차를 에폭만큼 반복한다.
epochs = 10 # 총 에폭 # 총 에폭만큼 반복 for epoch in range(epochs): epoch_loss = 0 # 에폭별 손실값 초기화 # '반복 횟수'만큼 반복 for images, labels in loader_train: # 이미지, 레이블 데이터 미니배치를 장비에 할당 images = images.to(device) labels = labels.to(device) # 옵티마이저 내 기울기 초기화 optimizer.zero_grad() # 순전파 : 이미지 데이터를 신경망 모델의 입력값으로 사용해 출력값 계산 outputs = model(images) # 손실 함수를 활용해 outputs와 labels의 손실값 계산 loss = criterion(outputs, labels) # 현재 배치에서의 손실 추가 epoch_loss += loss.item() # 역전파 수행 loss.backward() # 가중치 갱신 optimizer.step() # 훈련 데이터 손실값 출력 print(f'에폭 [{epoch+1}/{epochs}] - 손실값: {epoch_loss/len(loader_train):.4f}')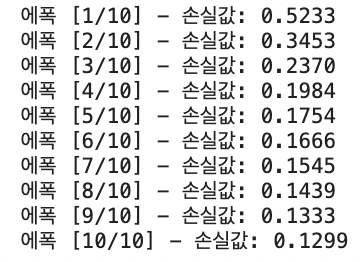
성능 검증
-
훈련이 끝난 후 valid data로 평가지표인 ROC AUC 값을 구한다.
from sklearn.metrics import roc_auc_score # ROC AUC 점수 계산 함수 임포트 # 실제값과 예측 확률값을 담을 리스트 초기화 true_list = [] preds_list = []- true_list에는 실젯값, preds_list에는 예측 확률값을 담는다.
model.eval() # 모델을 평가 상태로 설정 with torch.no_grad(): # 기울기 계산 비활성화 for images, labels in loader_valid: # 이미지, 레이블 데이터 미니배치를 장비에 할당 images = images.to(device) labels = labels.to(device) # 순전파 : 이미지 데이터를 신경망 모델의 입력값으로 사용해 출력값 계산 outputs = model(images) preds = torch.softmax(outputs.cpu(), dim=1)[:, 1] # 예측 확률 true = labels.cpu() # 실제값 # 예측 확률과 실제값을 리스트에 추가 preds_list.extend(preds) true_list.extend(true) # 검증 데이터 ROC AUC 점수 계산 print(f'검증 데이터 ROC AUC : {roc_auc_score(true_list, preds_list):.4f}')
- 예측 확률을 구하는 outputs.cpu()와 labels.cpu()는 이전에 GPU에 할당했던 outputs, labels 데이터를 다시 CPU에 할당하는 것이다. roc_auc_score()는 pytorch가 아니라 scikitlearn 함수라 gpu에 있는 데이터를 직접 사용하지 못해 바꾸어주는 것이다.
예측
-
test data를 담은 데이터셋과 데이터 로더를 만들어준다. 배치크기는 32로 한다.
dataset_test = ImageDataset(df=submission, img_dir='test/', transform=transform) loader_test = DataLoader(dataset=dataset_test, batch_size=32, shuffle=False) -
test data에서 타깃값이 1일 확률을 예측해 본다. 모델 성능을 검증하는 코드와 비슷하지만 test data에는 타깃값이 없어 for 문에 labels 변수를 할당하지 않았다. tolist()를 호출해 tensor를 list 타입으로 변경해 최종 제출 할 수 있게끔 해준다.
model.eval() # 모델을 평가 상태로 설정 preds = [] # 타깃 예측값 저장용 리스트 초기화 with torch.no_grad(): # 기울기 계산 비활성화 for images, _ in loader_test: # 이미지 데이터 미니배치를 장비에 할당 images = images.to(device) # 순전파 : 이미지 데이터를 신경망 모델의 입력값으로 사용해 출력값 계산 outputs = model(images) # 타깃값이 1일 확률(예측값) preds_part = torch.softmax(outputs.cpu(), dim=1)[:, 1].tolist() # preds에 preds_part 이어붙이기 preds.extend(preds_part) -
커밋 후 제출하면 0.9837점 정도로 낮은 등수를 기록하기에 성능을 개선하도록한다.
성능 개선
-
다양한 이미지 변환 수행, 깊은 CNN 모델, 뛰어난 옵티마이저 사용, 에폭 수 증가 등을 통해 성능을 개선시킬 수 있다.
-
데이터셋 클래스를 정의하는 부분까지 Baseline의 코드와 같고, 이미지 변환기를 정의하는 부분부터 다르다.
-
이미지의 변환을 통해 데이터 수를 늘리는 '데이터 증강(data augmentation)'을 해준다.
-
Pad(), RandomHorizontalFlip(), RandomRotation() 등 다양한 변환기를 Compose()로 묶어 하나의 변환기처럼 사용한다.
-
다양한 이미지 변환기를 활용할 때 훈련 데이터용과 검증 및 테스트 데이터용은 따로 만드는데, 훈련 시에는 다양한 변환을 적용하는 것이 좋지만 검증 및 테스트 시에는 원본 이미지와 너무 달라지면 예측이 어려워지기 때문이다.
from torchvision import transforms # 이미지 변환을 위한 모듈 # 훈련 데이터용 변환기 transform_train = transforms.Compose([transforms.ToTensor(), transforms.Pad(32, padding_mode='symmetric'), transforms.RandomHorizontalFlip(), transforms.RandomVerticalFlip(), transforms.RandomRotation(10), transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))]) # 검증 및 테스트 데이터용 변환기 transform_test= transforms.Compose([transforms.ToTensor(), transforms.Pad(32, padding_mode='symmetric'), transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))])- transforms.Compose()로 여러 변환기를 하나로 묶었다.
- transforms.ToTensor()로 이미지를 Tensor 객체로 만든다. 다른 transforms 변환기들이 Tensor 객체를 입력받으므로 가장 앞에 둔다.
- transforms.Pad()로 이미지 주변에 패딩을 추가한다. padding_mode = 'symmetric'은 패딩을 추가할 때 상하좌우 대칭이 되는 모양으로 만들어주는 것이다.
- transforms.RandomHorizontalFlip(), transforms.RandomVerticalFlip()은 각각 이미지를 무작위로 좌우, 상하 대칭 변환한다. 변환할 이미지의 비율을 설정할 수 있는데, 기본값은 0.5로 전체 이미지 중 50%를 무작위로 뽑아 대칭 변환하는 것이다.
- transforms.RandomRotation()으로 이미지를 회전 시킨다. 파라미터에 10을 전달하면 -10~10도 사이의 값만큼 무작위로 회전한다.
- transforms.Normalize()는 데이터를 지정한 평균과 분산에 맞게 정규화해준다. 0~1사이 값으로 설정해준다. 이 문제에서 이미지 데이터는 R,G,B로 구성이 되어 있으므로 각각 정규화해야하기에 평균과 분산에 값을 세 개씩 전달한다.
-
데이터셋 및 데이터 로더를 생성해준다.
dataset_train = ImageDataset(df=train, img_dir='train/', transform=transform_train) dataset_valid = ImageDataset(df=valid, img_dir='train/', transform=transform_test)- 훈련 데이터셋에는 훈련용 변환기, 검증 데이터셋에는 검증/테스트용 변환기를 전달한다.
from torch.utils.data import DataLoader # 데이터 로더 클래스 loader_train = DataLoader(dataset=dataset_train, batch_size=32, shuffle=True) loader_valid = DataLoader(dataset=dataset_valid, batch_size=32, shuffle=False)- 앞의 데이터셋에서 이미지 변환기를 전달했기에 데이터 로더로 데이터를 불러올 때마다 이미지 변환을 수행한다. 따라서 원본 이미지는 같지만 에폭마다 서로 다른 이미지로 훈련하는 효과를 얻을 수 있다.
모델 생성
-
모델의 예측력을 높이기 위해 신경망 계층을 Baseline 보다 더 깊게 만들어주고, 배치 정규화를 적용하고 활성화 함수를 LeakyRelu로 바꾸어준다.
import torch.nn as nn # 신경망 모듈 import torch.nn.functional as F # 신경망 모듈에서 자주 사용되는 함수 class Model(nn.Module): # 신경망 계층 정의 def __init__(self): super().__init__() # 상속받은 nn.Module의 __init__() 메서드 호출 # 1 ~ 5번째 {합성곱, 배치 정규화, 최대 풀링} 계층 self.layer1 = nn.Sequential(nn.Conv2d(in_channels=3, out_channels=32, kernel_size=3, padding=2), nn.BatchNorm2d(32), # 배치 정규화 nn.LeakyReLU(), # LeakyReLU 활성화 함수 nn.MaxPool2d(kernel_size=2)) self.layer2 = nn.Sequential(nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, padding=2), nn.BatchNorm2d(64), nn.LeakyReLU(), nn.MaxPool2d(kernel_size=2)) self.layer3 = nn.Sequential(nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, padding=2), nn.BatchNorm2d(128), nn.LeakyReLU(), nn.MaxPool2d(kernel_size=2)) self.layer4 = nn.Sequential(nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, padding=2), nn.BatchNorm2d(256), nn.LeakyReLU(), nn.MaxPool2d(kernel_size=2)) self.layer5 = nn.Sequential(nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, padding=2), nn.BatchNorm2d(512), nn.LeakyReLU(), nn.MaxPool2d(kernel_size=2)) # 평균 풀링 계층 self.avg_pool = nn.AvgPool2d(kernel_size=4) # 전결합 계층 self.fc1 = nn.Linear(in_features=512 * 1 * 1, out_features=64) self.fc2 = nn.Linear(in_features=64, out_features=2) # 순전파 출력 정의 def forward(self, x): x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) x = self.layer4(x) x = self.layer5(x) x = self.avg_pool(x) x = x.view(-1, 512 * 1 * 1) # 평탄화 x = self.fc1(x) x = self.fc2(x) return x- nn.BatchNorm2D()로 배치 정규화(Batch Normalization)를 해주었다. 파라미터로 채널 수를 전달한다.
- LeakyReLu()로 활성화 함수를 설정한다.
- 전결합 계층은 2개 정의해주었다.
-
정의한 Model 클래스를 활용해 CNN 모델을 만든 뒤 device에 할당한다.
model = Model().to(device)
모델 훈련
-
손실 함수와 옵티마이저를 설정해준다.
# 손실 함수 criterion = nn.CrossEntropyLoss()# 옵티마이저 optimizer = torch.optim.Adamax(model.parameters(), lr=0.00006)- 손실 함수는 Baseline과 같이 CrossEntropy로 설정해주고, 옵티마이저는 Adamax를 사용한다. 배치 크기가 줄어들수록 학습률은 작게 설정해야 한다.
-
데이터를 증강해 훈련할 데이터가 많아졌으니 에폭을 늘려준다.
epochs = 70 # 총 에폭 # 총 에폭만큼 반복 for epoch in range(epochs): epoch_loss = 0 # 에폭별 손실값 초기화 # '반복 횟수'만큼 반복 for images, labels in loader_train: # 이미지, 레이블 데이터 미니배치를 장비에 할당 images = images.to(device) labels = labels.to(device) # 옵티마이저 내 기울기 초기화 optimizer.zero_grad() # 순전파 : 이미지 데이터를 신경망 모델의 입력값으로 사용해 출력값 계산 outputs = model(images) # 손실 함수를 활용해 outputs와 labels의 손실값 계산 loss = criterion(outputs, labels) # 현재 배치에서의 손실 추가 epoch_loss += loss.item() # 역전파 수행 loss.backward() # 가중치 갱신 optimizer.step() print(f'에폭 [{epoch+1}/{epochs}] - 손실값: {epoch_loss/len(loader_train):.4f}')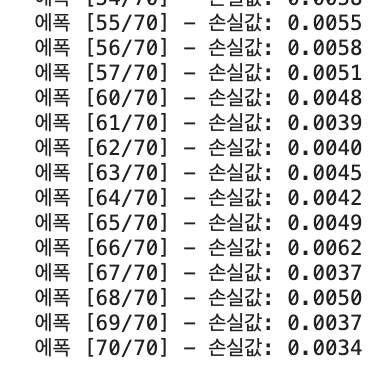
성능 검증
-
검증 데이터로 모델 성능을 평가한다. Baseline 코드와 같다.
from sklearn.metrics import roc_auc_score # ROC AUC 점수 계산 함수 임포트 # 실제값과 예측 확률값을 담을 리스트 초기화 true_list = [] preds_list = [] model.eval() # 모델을 평가 상태로 설정 with torch.no_grad(): # 기울기 계산 비활성화 for images, labels in loader_valid: # 이미지, 레이블 데이터 미니배치를 장비에 할당 images = images.to(device) labels = labels.to(device) # 순전파 : 이미지 데이터를 신경망 모델의 입력값으로 사용해 출력값 계산 outputs = model(images) preds = torch.softmax(outputs.cpu(), dim=1)[:, 1] # 예측 확률값 true = labels.cpu() # 실제값 # 예측 확률값과 실제값을 리스트에 추가 preds_list.extend(preds) true_list.extend(true) # 검증 데이터 ROC AUC 점수 계산 print(f'검증 데이터 ROC AUC : {roc_auc_score(true_list, preds_list):.4f}')
- ROC AUC가 0.9902에서 0.9998로 상승했다. 1에 가까우니 거의 완벽히 분류해낸 것이다.
예측 및 결과 제출
-
transform_test 변환기를 이용해 데이터셋을 만들고 test data로 예측한다.
dataset_test = ImageDataset(df=submission, img_dir='test/', transform=transform_test) loader_test = DataLoader(dataset=dataset_test, batch_size=32, shuffle=False) # 예측 수행 model.eval() # 모델을 평가 상태로 설정 preds = [] # 타깃 예측값 저장용 리스트 초기화 with torch.no_grad(): # 기울기 계산 비활성화 for images, _ in loader_test: # 이미지 데이터 미니배치를 장비에 할당 images = images.to(device) # 순전파 : 이미지 데이터를 신경망 모델의 입력값으로 사용해 출력값 계산 outputs = model(images) # 타깃값이 1일 확률(예측값) preds_part = torch.softmax(outputs.cpu(), dim=1)[:, 1].tolist() # preds에 preds_part 이어붙이기 preds.extend(preds_part) -
제출 파일을 만들고 이미지 파일은 더 이상 필요 없으니 디렉터리 전체를 삭제한다.
submission['has_cactus'] = preds submission.to_csv('submission.csv', index=False)import shutil shutil.rmtree('./train') shutil.rmtree('./test') -
커밋 후 제출하면 최종 점수는 0.9998로 1221명 중 455등으로 상위 37% 정도를 기록했다.
최종
-
성능을 조금 더 높이기 위해서는 훈련 데이터를 9:1로 나눠 9로만 모델을 훈련하고 1은 검증용으로 쓰고 훈련에 사용하지 않는 방법을 사용하면 된다. 이렇게 하면 성능을 매우 개선하여 최종 점수 0.9999를 기록할 수 있다.
-
pytorch를 활용해 딥러닝 모델을 구축하는 연습을 할 수 있었고, 이미지 변환, 옵티마이저 등을 다뤄볼 수 있었다.
-
github에 해당 코드를 올려두었다.
참고: 머신러닝·딥러닝 문제해결 전략 (캐글 수상작 리팩터링으로 배우는 문제해결 프로세스와 전략)
참고: https://www.kaggle.com/code/bonhart/simple-cnn-on-pytorch-for-beginers/notebook
