본 글에서는 두 번째 learning 방식인 temporal difference learning (TD)에 대해서 알아보도록 한다.
앞서 살펴본 MC는 episode가 종료되기 전까지 prediction이 진행되지 않는다는 단점이 있었다. 이에, MC처럼 sample backup을 하되 DP와 같이 time-step마다 prediction할 수 있는 방식이 바로 temporal difference learning이다.
Temporal Difference Learning
앞선 MC에서의 prediction은 아래와 같이 episode에서 실제로 얻어진 return 를 통해 이루어졌다.
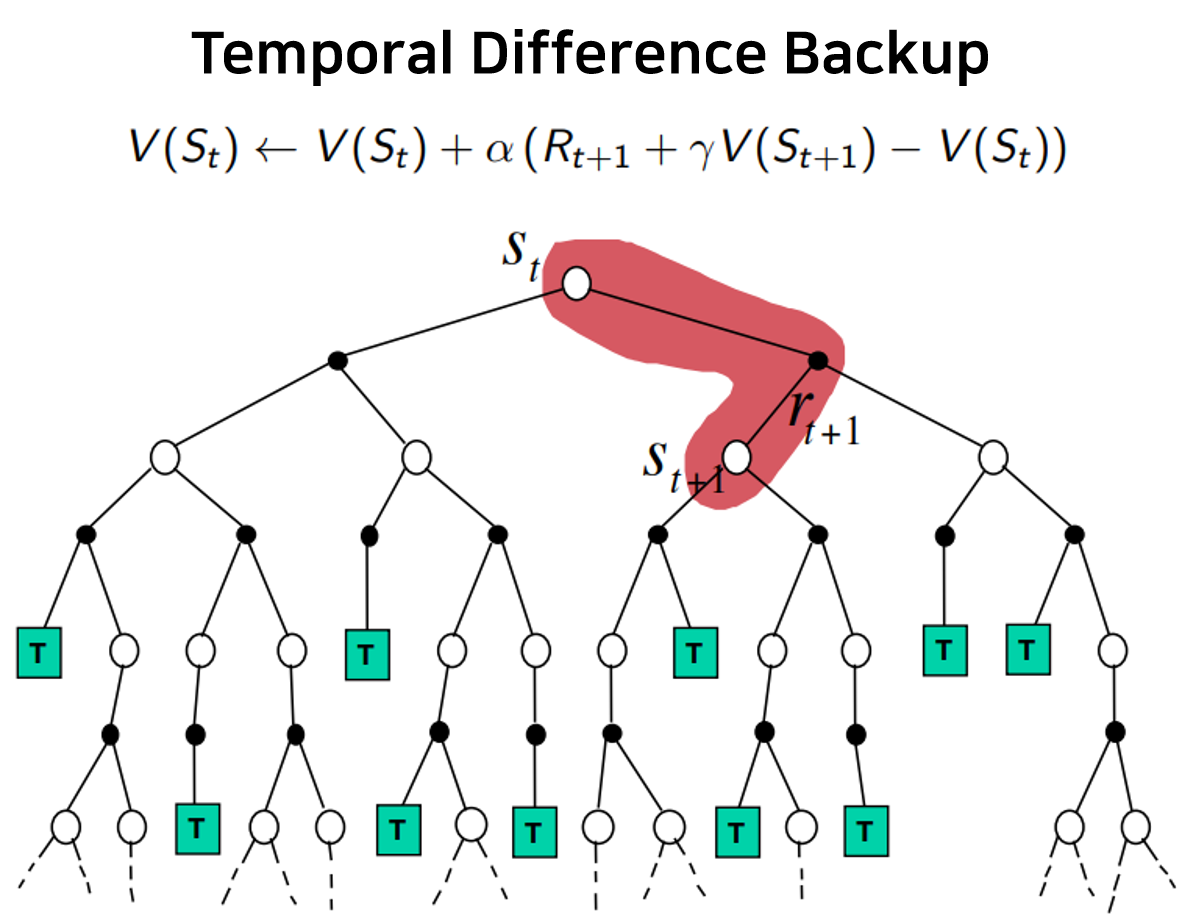
한편 TD(0)에서는, 아래처럼 estimated return 을 통해 predict한다. (괄호 안 숫자 0의 의미는 후술하도록 하겠다.)
이 때, 를 TD target, 를 TD error라고 칭한다.
따라서 MC와 같이 zero-initialized value function과 random policy로 시작하되, 매 time-step마다 sampling된 immediate reward와 다음 state의 value function으로 TD target을 구성하여 prediction을 진행하면 된다. 이는 bootstrapping(복원추출을 통해 true value를 estimate)을 진행하는 DP와 sampling을 통해 model-free하게 학습하는 MC의 특징을 모두 포함하고 있음을 알 수 있다.
이러한 TD는 매 time-step마다 prediction이 이뤄지므로 noise가 적어 학습의 variance가 낮지만 value function을 immediate reward만으로 bootstrapping하여 추정하므로 bias가 높다는 단점이 있다.
| Learning Method | Bias | Variance |
|---|---|---|
| MC | 실제 return 값을 이용하므로 낮음 | Episode의 randomness에 의해 높음 |
| TD | Immediate reward 값만으로 추정하여 높음 | 단일 step update의 적은 noise로 낮음 |
SARSA
이미 눈치챘을 수도 있지만 위 TD(0)의 prediction 관계식은 state-value function을 사용하므로 아직 model-free하지 않다. 따라서 매 time-step마다 아래와 같이 Q-value function에 대한 estimation이 이뤄져야 한다.
또한 local optimum에 빠지지 않도록 하기 위해 앞선 MC에서와 같이 -greedy policy control도 적용할 수 있다. 이를 통해 만들어진 학습 방식을 SARSA라고 칭하며, 이는 매 time-step의 prediction에 필요한 로부터 지어진 직관적인 이름이다.
n-step TD
앞서 말했듯, TD는 오직 immediate reward 값만으로 value function을 업데이트하므로 높은 bias를 가진다. 이를 완화하며 MC와 TD의 장점을 모두 살리기 위해, 아래와 같이 agent가 위치한 state로부터 n-step이 지난 후 얻게 되는 n-step return 을 활용하는 방법이 있으며, 이를 n-step TD라고 칭한다.
이 때, n을 충분히 크게 하여 최종 state에 도달할 경우, MC와 동일해짐을 알 수 있다.
Forward-View of TD()
또한 과 의 값에 따라 optimal policy와의 error 분포가 달라지게 되는데, 아래와 같이 각 -step return 의 geometrically weighted sum 를 TD target으로 설정하면 다양한 -step TD의 장점을 적절히 취할 수 있으며, 이를 -return이라고 칭한다. (episode가 진행되는 정방향으로 update가 이뤄지므로 forward-view라는 명칭이 붙는다.)
하지만, 이는 MC에서와 같이 최종 state로부터 얻은 return까지 필요하므로 episode가 끝나야만 update를 할 수 있다는 문제점이 다시 생긴다.
Backward-View of TD()
앞선 문제는 eligibility trace 개념을 적용하여 해결할 수 있다. 이를 쉽게 이해하기 위해 credit assignment problem을 생각해볼 수 있는데, 예컨대 'Bell''Bell''Bell''Light''Shock'의 순으로 발생한 사건(state)에 대해, "'Shock'의 발생은 'Bell'과 'Light' 중 어느 것으로부터 더 크게 기인했는가?" 라는 질문이 그에 해당한다.
위 질문에 대한 답은 아래의 두 heuristic으로 생각해볼 수 있다.
- Frequency heuristic : Most frequent state에 credit을 부여해, 'Bell'로부터 기인했다고 보는 것이다.
- Recency heuristic : Most recent state에 credit을 부여해, 'Light'로부터 기인했다고 보는 것이다.
여기서 credit이란, 결과(reward)에 대해 과거 상황(state)들이 영향을 미친 정도로 이해될 수 있다. 위의 두 heuristic을 모두 고려한 eligibility trace 는 아래와 같이 정의되며, 이를 통해 episode 진행 중 방문한 모든 state에 대하여 value prediction을 수행할 수 있다. (Episode가 진행되는 역방향에 대해 TD error 값을 분배하므로 backward-view의 명칭이 붙는다.)
이는 time-step 에서 sampling된 을 이전에 방문한 state들에게 적절한 가중치를 달아 배분하는 것으로 이해해볼 수 있다. 1)Recency heuristic은 time-step이 진행될수록 1보다 작은 값()으로 weighted되어 방문한지 오래된 state일수록 더 적게 반영해주는 방식으로 고려된다. 2)Frequency heuristic은 각 state에 방문할 때마다 값에 1을 더해주는 방식으로 고려된다. 따라서, state 의 값은 agent가 에 방문하면 높아졌다가 점차 낮아지고, 다시 방문하면 높아졌다 낮아지는 형태로 값이 변하며, 해당 의 값도 그에 비례하여 매 시간마다 update된다.
n-step SARSA / SARSA()
앞선 SARSA와 동일하게, n-step TD와 TD()의 state-value function을 Q-value function으로 바꾸어 model-free learning이 가능해지도록 하면 아래와 같아진다.
n-step SARSA single-step update의 high-bias 문제를 해결
Forward-view SARSA() 각 n-step SARSA의 장점을 종합
Backward-view SARSA() episode가 끝나지 않아도 update할 수 있도록 개선
하지만 MC와 SARSA의 공통된 문제점은, 최종적으로 얻어내려는 target policy를 prediction 과정에서 다음 state를 선택하는 behavior policy로 그대로 활용하는 on-policy control에 해당하므로 local optimum에 빠지기 쉽다는 것이다. 이에, 다음 글에서는 학습과정의 episode를 결정하는 behavior policy와 얻어내려는 target policy를 서로 분리하여 해당 문제를 해결한 off-policy control 기법에 대해 다뤄보도록 하겠다.
References
- UCL Course on RL, David Silver
- Reinforcement Learning: An Introduction, Richard S. Sutton
- Fundamental of Reinforcement Learning, 이웅원
