ros공부를 하던 도중 자주쓰는 명령어 혹은 용어들만 따로 모아 정리해보았다.
자꾸까먹어서....
Ex) rospy_tutorial
- rostopic : 현재 메시지 토픽 목록 출력
$ rostopic list
/chatter
/rosout
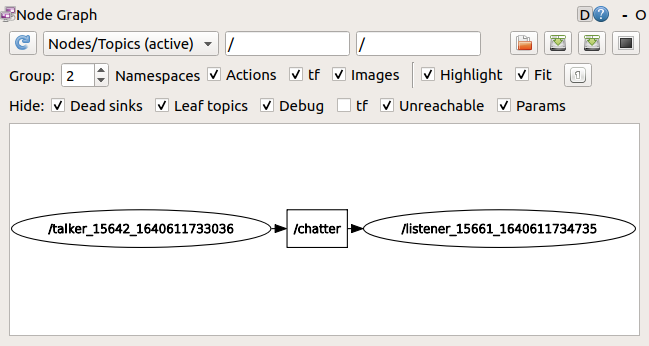
/rosout_agg- rqt_graph : roq qt기반 그래프 시각화 도구, 현재 실행중인 노드 상태 그래프로 시각화
- rosrun : 단일 ros노드 실행
rosrun [패키지 이름][노드]
$ rosrun rospy_tutorials talker- roslaunch : 여러 노드 실행
여러 개의 ROS노드 시작을 자동화하도록 설계된 명령행 도구
rosrun처럼 보이나 roslaunch는 노드보다는 시작파일(launch file)을 사용하여 동작함
# rospy_tutorials 패키지의 talker_listener.launch파일
<launch>
<node name="listener" pkg="rospy_tutorials" type="listener.py" output="screen"/>
<node name="talker" pkg="rospy_tutorials" type="talker.py" output="screen"/>
</launch>위와 같이 .launch파일로 되어있으며 여러개의 노드를 실행할 수 있음
$ roslaunch rospy_tutorials talker_listener.launch#### 재사상(topic 이름 충돌 방지)~
노드 이름 변경하는 재사상 문법 __name
$ rosrun rospy_tutorials talker __name:=talker1
$ rosrun rospy_tutorials talker __name:=talker2
화이팅!!