Title
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis (ECCV 2020, Oral)
Abstract
- SOTA for synthesizing novel views of complex scenes
- Optimize an underlying continuous volumetric scene function with sparse set of input views
- Fully-connected deep network
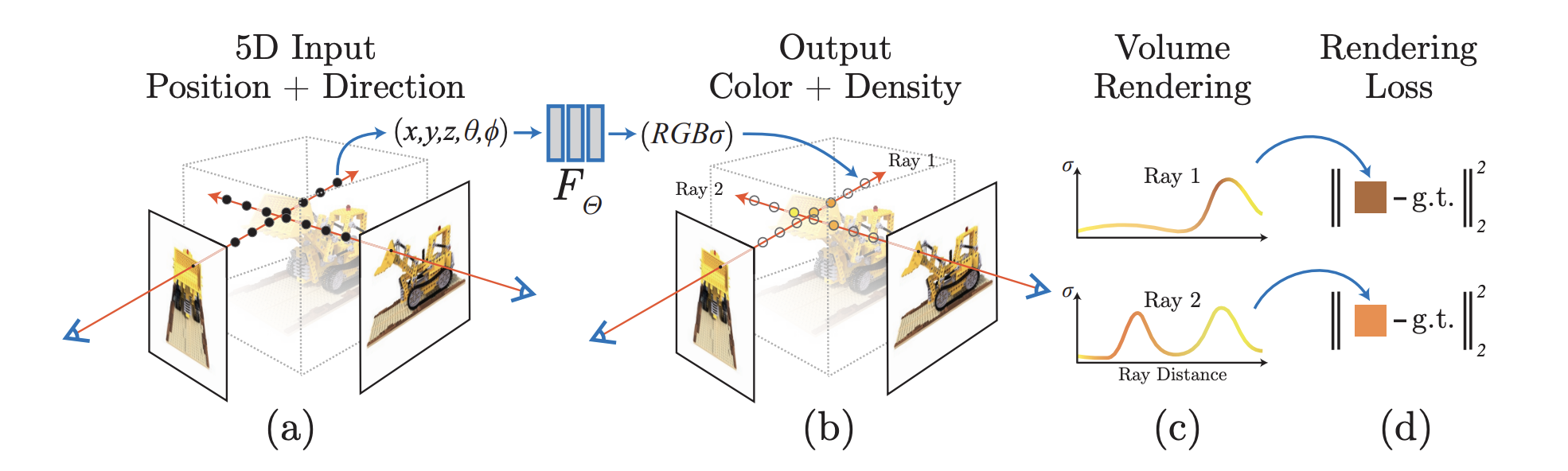
- Input: single continuous 5D coordinate (spatial location & viewing direction)- Output: volume density & view-dependant emitted radiance at that spatial location
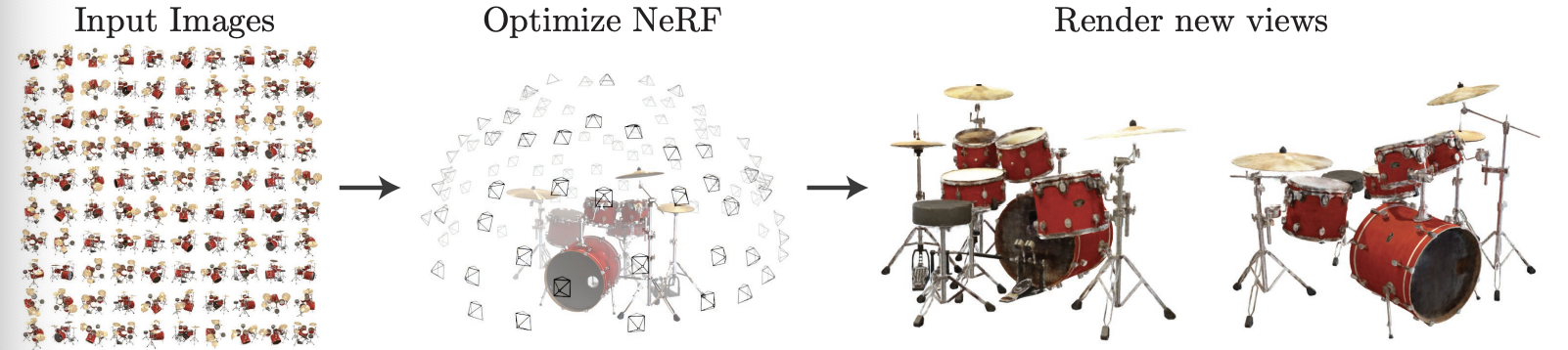
- Querying 5D coordinates along camera rays & classic volume rendering techniques => Project the output colors and densities into an image => synthesize views
- Volume rendering is naturally differentiable -> only input required to optimize representation is a set of images with known camera poses
- Describe how to effectively optimize neural radiance fields
- render photorealistic novel views of scenes- results that outputperform prior work on neural rendering and view synthesis
- Urge readers to view supplementary video for synthesis results

1 Introduction
we address the long-standing problem of view synthesis in a new way by directly optimizing parameters of a continuous 5D scene representation to minimize the error of rendering a set of captured images.
NeRF
- Represent a static scene as a continuous 5D function
- Function outputs
- radiance emitted in each direction at each point in space
- Density at each point (differential opacity controlling how much radiance is accumulated by a ray passing through - Optimizes a deep fully-connected neural network (MLP)
- Regressing from a single 5D coordinate to a single volume density and view-dependant RGB color - Neural radiance field (NeRF) of a particular viewpoint
- To render NeRF,
- March camera rays through the scene -> sampled set of 3D points- Those points and their corresponding 2D viewing directions -> NN -> set of colors and densities
- Colors and densities -> classical volume rendering -> accumulate those into a 2D image
- The process is naturally differentiable -> gradient descent to optimize the model
- Minimizing the error between each observed image and the corresponding views rendered from the representation.
=> Coherent model of the scene by assigning high volume densities and accurate colors to the locations that contain the true underlying scene content.
Additional Method
- Basic implementation of optimizing NeRF -> does not converge to a high-resolution & inefficient in the required number of samples per camera ray
- Transform input 5D coordinates with a positional encoding -> MLP represents higher frequency scene representation.
Pros of NeRF
- Volumetric representation
- complex real-world geometry & gradient-based optimization
- Overcomes prohibitive storage costs of discretized voxel grids
Technical contributions
- 5D neural radiance field(basic MLP networks) that represents complex scenes
- Differentiable rendering based on classical volume rendering techniques.(hierarchical sampling strategy)
- Positional encoding to map 5D input into a high-dim space
2. Related Work
Quick 3D vision terms
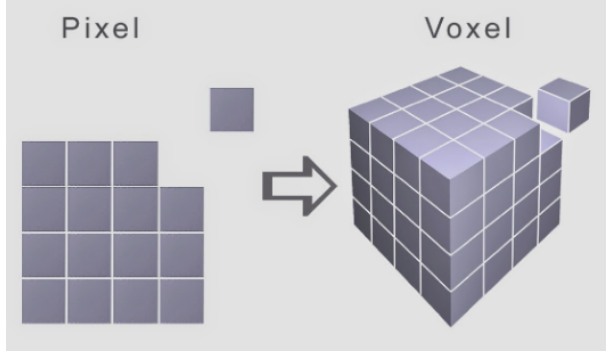
- Voxel grid
Representing objects in the weights of an MLP
- 3D spatial location to an implicit representation of the shape. => unable to produce realistic scenes.
Neural 3D shape representations
- xyz coordinate -> signed distance / occupancy fields
Signed Distance Field
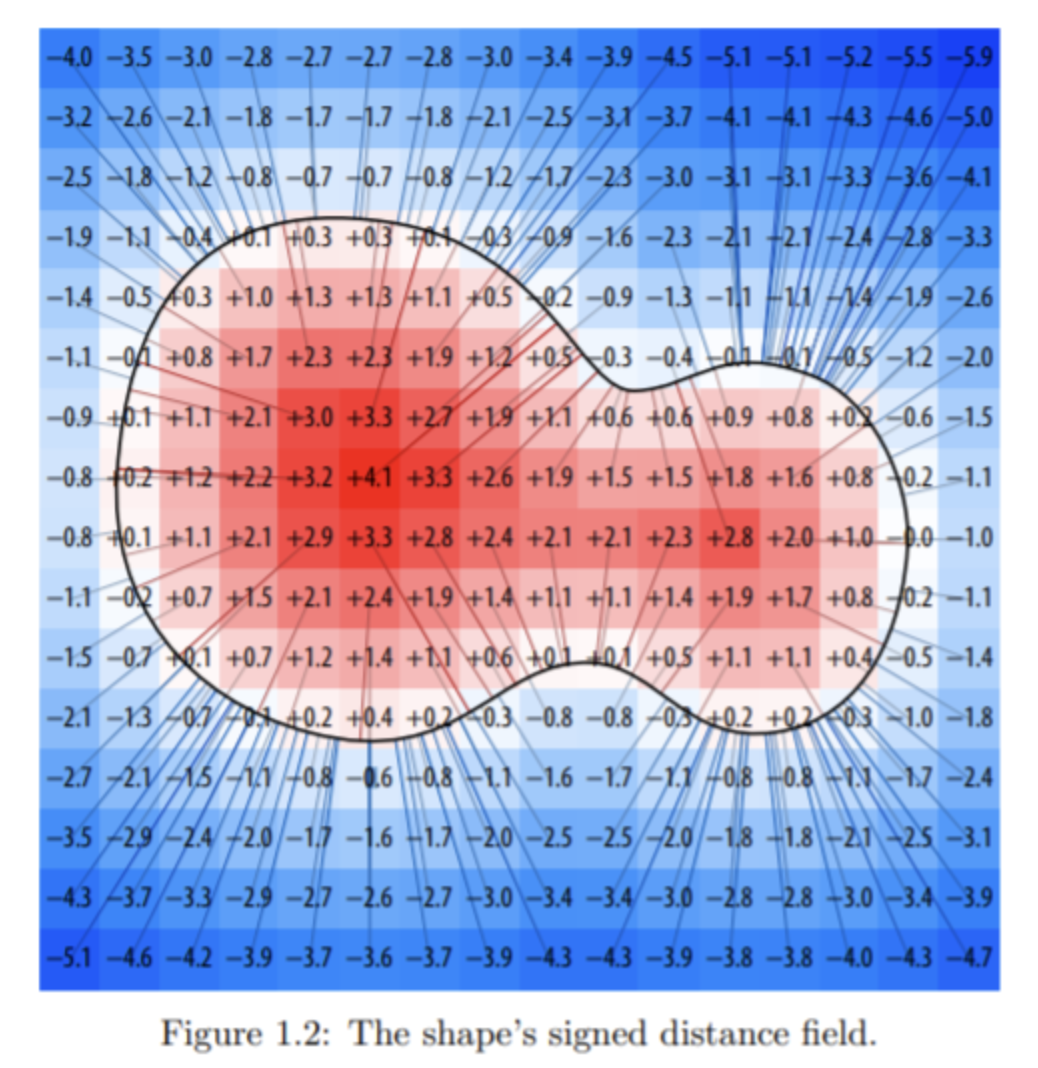
- signed distance field represents geometry with distance from the object's surface.
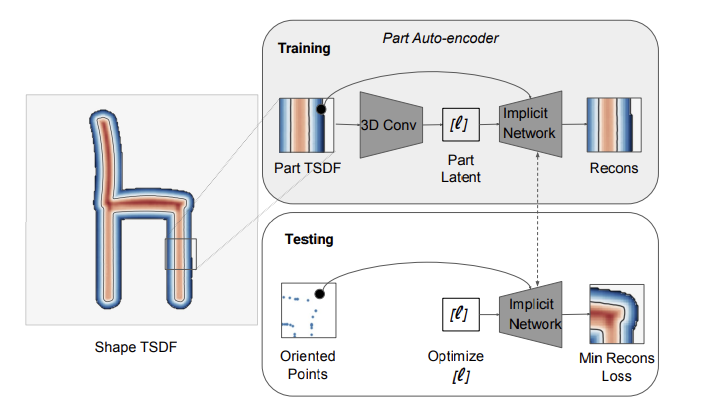
- TSDF shape for representing 3d mesh.
Occupancy fields
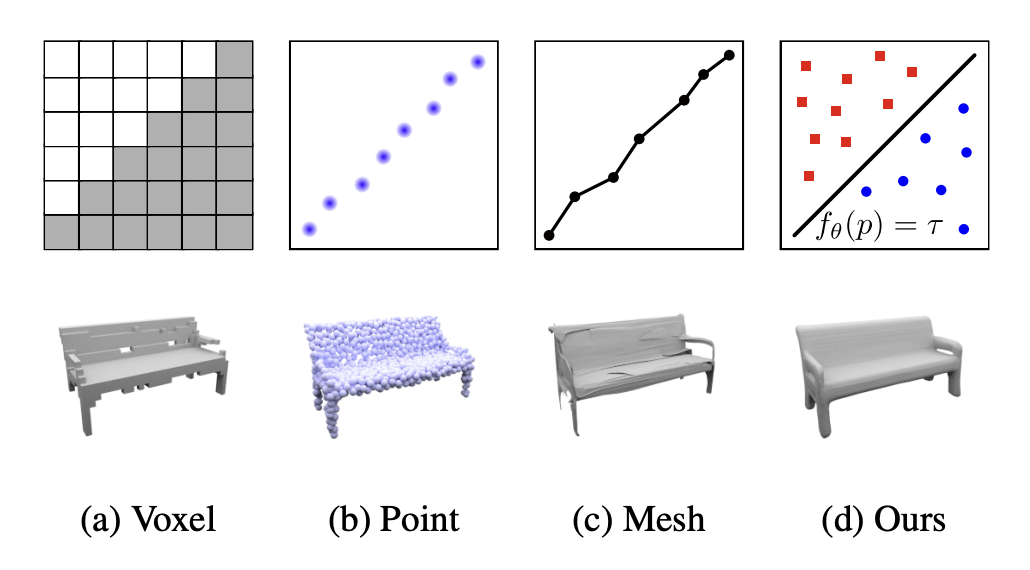
- Continuous decision boundary of a classifier(DNN) as a 3D surface
Limitation
- Limited by their requirement of access to ground truth 3D geometry
- Limited to simple shapes with low geometric complexity -> oversmoothed renderings.
View synthesis and image-based rendering
Case for Dense sampling
-
photorealistic novel view can be reconstructed by simple light field sample interpolation
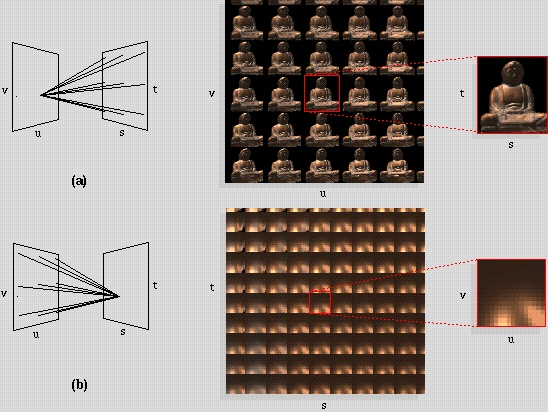
-
Figure of light field rendering (1996)
Case for sparser view sampling
- Prediction with traditional geometry and appearance representation
Mesh-based representations of scenes
- Large-Scale texturing of 3D reconstruction (2014) -> diffuse based
- blending field with view-dependant representation (2001)
Gradient descent based mesh optimizations
-
Differentiable rasterizers
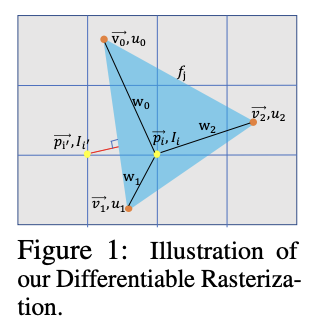
- Approximate gradients with respect to pixel positions using first-order Taylor approximation
-
Pathtracers
=> Gradient-based mesh optimization based on image reprojection is often difficult (local minima or poor conditioning of the loss landscape) + requires fixed topology -> unavailable for real-world scene.
Volumetric representations
-
Set of input RGB images -> high-quality photorealistic view synthesis
-
early volumetric approaches (observed image -> direct prediction of color voxel grids)
-
Large datasets of multiple scene -> DNN that predict sampled volumetric representation
-
CNN to represent voxel grids
=> Voxel based approaches are limted by poor time and space complexity (discrete sampling)
3. Neural Radiance Field Scene Representation
- Continuous scene as a 5D vector-valued function
- Input : 3D location + 2D viewing direction
- Output: emitted color & volume density .
- Approximate continuous 5D scene representation with an MLP network
- Network predicts volume density as only a function of location (encourge the representation to be multiview consistent)
Network structure
-
MLP
- -> 8 fully-connected layer(ReLU, 256 channel) -> , 256-dim feature vector
- feature vector viewing direction -> 1 full layer(ReLU, 128 channel) ->
4. Volume Rendering with Radiance Fields
Volume Rendering
- NeRF render the color of any ray passing through a scene using principles from classical volume rendering
- Volume density -> differential probability of a ray terminating at an infinitesimal particle at location .
- Expected color of camera ray :
- are near and far bounds
- -> accumulated transmittance along the ray
- Probability that the ray travels from to without hitting any other particle.
Estimating integral
-
Estimate continuous integral with quadrature(구적법).
-
Stratified sampling(<-> deterministic quadrature of voxel grid rendering)
- Partition into evenly-spaced bins
- draw one sample uniformly at random from each bin
-
Use the samples to estimate with quadrature rule
- : distance between adjacent samples
-
is trivially differentiable and reduces to traditional alpha compositing with .
5. Optimizing a Neural Radiance Field
-
Above components are not sufficient for state-of-the-art quality
-
2 improvements
- Positional encoding of the input coordinates
- Hierarchical sample -> efficiently sample high-frequency representation
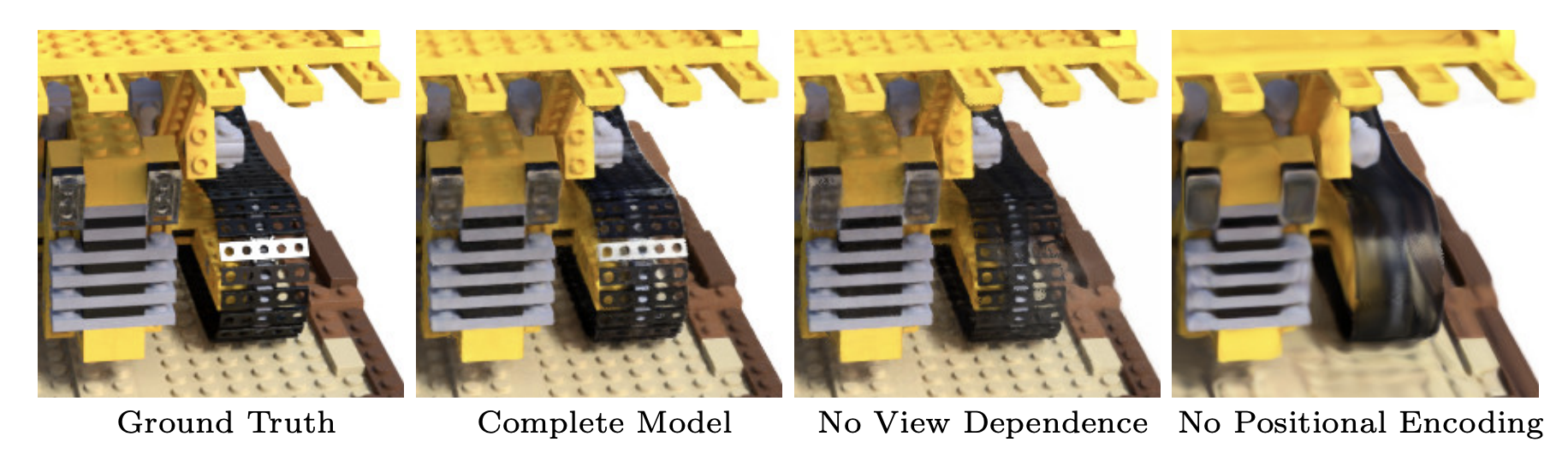
5.1 Positional Encoding
- Deep networks are biased towards learning lower frequency functions. -> perform poorly at high-frequency variation in color and geometry.
- Mapping inputs to a high dim space using high frequency functions enables better fitting of data that contains high frequency variation.
-
- is not learnable.
- is a mapping from into a higher dim
- is applied separately to each of the 3 coordinate in , and to 3 components of the Cartesian viewing direction unit vector ( is equivalent with
- for and for .
Difference with PE in Transformer
PE in transformer
- Provide discrete positions of tokens in a sequence
- Used for providing position information to architecture that does not contain any notion of order
PE in NeRF
- Fuctions to map continuous input coordinates into a high dim space
- Enable MLP to more easily approximate a higher frequency function
5.2 Hierarchical volume sampling
- Inefficient rendering strategy (evaluate at query points along camera ray)
- free space and occluded regions do not contribute to output.
- Hierarchical representation -> allocating samples proportionally to their expected effect on the final rendering => increases rendering efficiency
Network
- Optimize two network to represent the scene
- "coarse" and "fine"
- sample locations using stratified sampling
- evaluate "coarse" network at these locations
- Use output of "coarse" network to produce more informed sampling of points along each ray where samples are biased towards the relevant parts of the volume.
- Rewrite alpha composited color from the coarse network as a weighted sum of all sampled colors along the ray.
- ()
- Normalize the weights as => piecewise-constant PDF along the ray
- Sample a second set of locations from the distribution with inverse transform sampling
- Evaluate "fine" network at the union of the first and second set of samples
- Compute the final rendered color of the ray using Eqn.3 but using all samples.
=> Allocates more samples to regions we expect to contain visible content.
5.3 Implementation details
- Each scene optimization requires
- dataset of captured RGB images of the scene
- corresponding camera poses and intrinsic parameter + scene bounds
- estimated from COLMAP structure-from motion package
- At each optimization iteration,
- randomly sample a batch of camera rays from the set of all pixels in the dataset
- hierarchical sampling -> query samples from coarse network and samples from fine network
- Volume rendering -> render the color of each ray from both sets of samples
- Loss calculation (total squared error between rendered and true pixel colors)
- -> set of rays in each batch
- Final rendering with only
- Details
- Batch size: 4096
- ,
- Adam (weight decay of to
- Single scene optimization: 100-300k iteration (1-2 day in single V100)
6. Results
6.1 + 6.2 Datasets and Comparisons

Comparison on synthetic datset with physically-based renderer

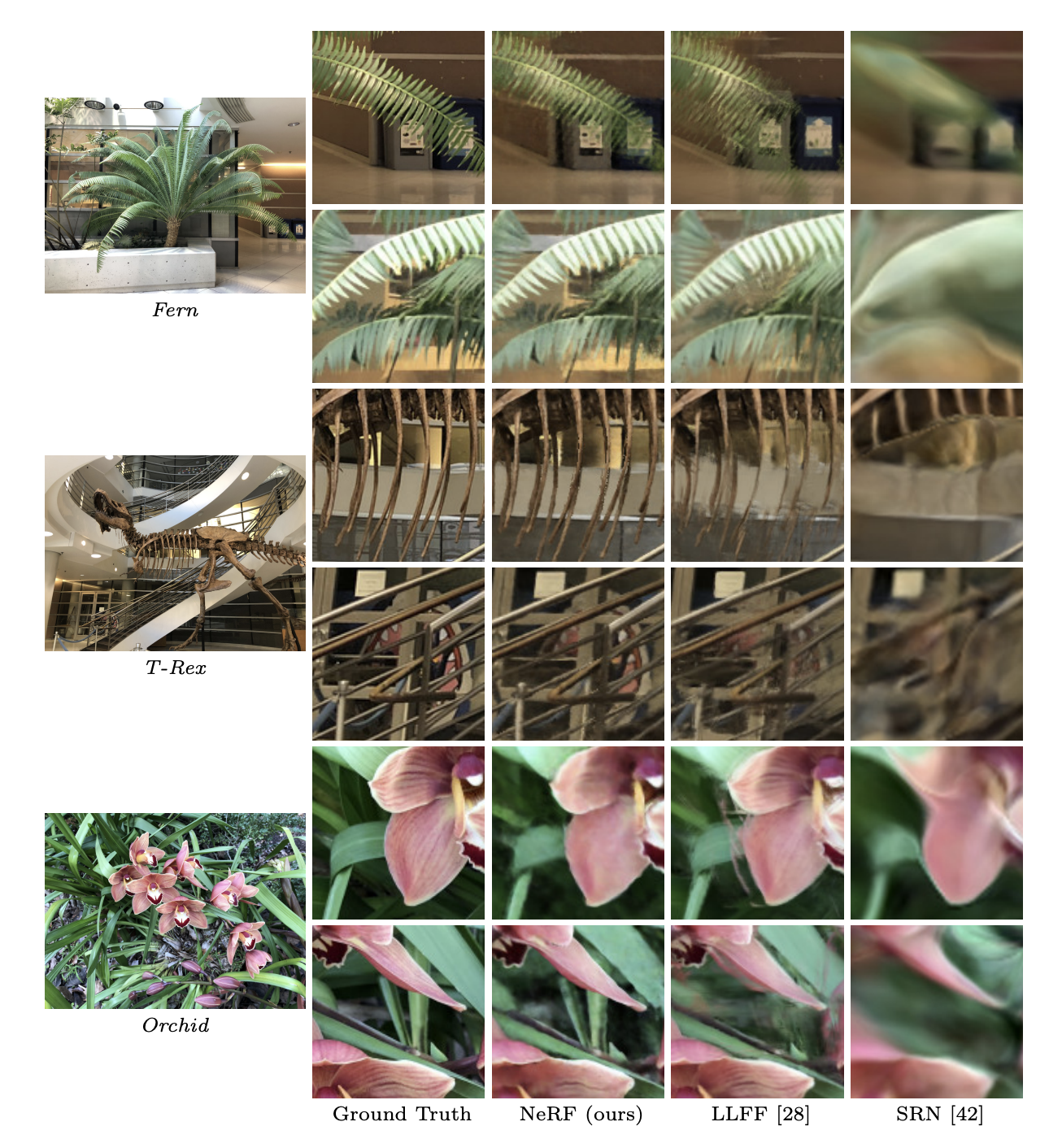
Comparisons on real world scenes
6.3 Discussion
- NeRF outperform both baselines
- SRN: heavily smoothed geometry and texture & limited by single depth and color per camera ray
- NV: While can capture detailed geometry and appearance, fails at scaling for find detail in high resoultion (due to underlying explicit voxel grid
- LLFF: frequently fails to estimate correct geometry in synthetic datasets(due to limited sampling guide line of 64 pixels)
Time vs space tradeoffs
- All single scene methods take at least 12 hours to train per scene except LLFF(10 minutes and under)
- LLFF requires 15GB for every input image
- NeRF: 5MB for network weights
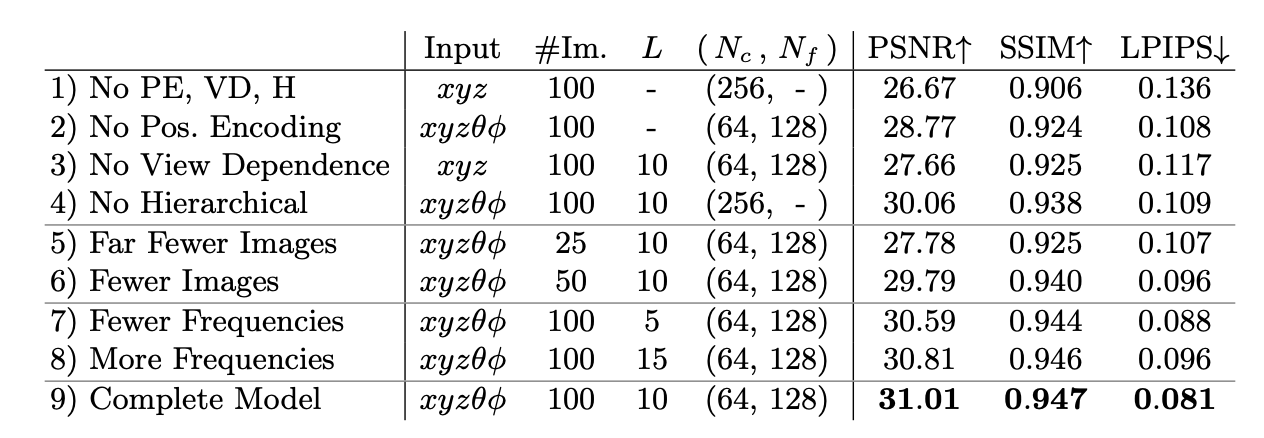
6.4 Ablation studies
7. Conclusion
- 5D neural radiance fields produce better renderings than previous discretized voxel representations
- Still much more pregress to be made in efficiency of both optimizing and rendering
- Interpretability as also future work.
