
이 글은 Linear Algebra and Its Applications 책을 정리한 글입니다.
2.1 Matrix Operations
Matrix의 표기법 및 용어
- m개의 rows와 n개의 columns를 갖은 matrix의 th row, th column의 entry를 로 표기한다.
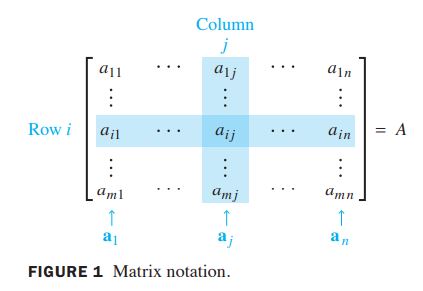
- 또한 matrix A의 각 column을 vector in 으로 다음과같이 표기할 수 있다
- matrix의 를 diagonal entries 라고 하고 nondiagonal entries가 zero인 square matrix를 diagoanl matrix 라고 한다
Theorem1
Let A,B and C be matrices of the same size, and let and be scalars
a. A + B = B + A
b. (A + B) + C = A + (B + C)
c. A + 0 = A
d. (A + B) = A + B
e. ()A = A + A
f. (A) = ()A
- 위 theorem의 각 matrix를 column으로 쪼개서 봤을때도 ch1의 algebratic properties of (벡터의 성질)을 그대로 유지한다.
Matrix multipliaction
-
-
A를 matrix, B를 의 column vector를 가진 matrix라고 하였을때 product AB 는 matrix이며 를 column 으로 갖는다
- matrix AB의 entry는 다음과같이 표현될 수 있다
Properties of Matrix Multiplication
Theorem2
Let A be an matrix, and let B and C have sizes for which the indicated sums and products are defined.
a. A(BC) = (AB)C
b. A(B + C) = AB + AC
c. (B + C)A = BA + CA
d. (AB) = (A)B = A(B)
e. A = A = A
The Transpose of a Matrix
- Given an matrix A, the transpose of A is the matrix, denoted by , whose columns are formed from the corresponding rows of A.
Theorem3
a. = A
b.
c. For any scalar r,
d.
2.2 The Inverse of Matrix
Invertible Matrix
-
nn matrix A가 invertible하다면 nn matrix C가 있을때 and 고 이때 는 identity matrix이며 또한 matrix C는 invertible하며 unique하다.
-
B를 또다른 A의 inverse라고 가정했을때 아래와 같이 결국 C는 unique하다
- matrix가 not invertible하다면 singular matrix, invertible하다면 nonsingular matrix 라고 한다.
Theorem4
Let A = . if ad-bc 0, then A is invertible and
.
if ad-bc = 0, then A is not invertible
- 이때 ad-bc를 determinent of A 라고 하며 det A 로 표기한다.
Theorem5
If A is an invertible n n matrix, then for each in ,
the equation A has the unique solution
Theorem6
a. If A is invertible matrix, then is invertible and
b. If A and B are nn invertible matrices, then so is AB, and the inverse of AB is the product of the inverces of A and B in the reverse order.
That is
c. If A is an invertible matrix, then so is , and the inverse of is the tranpose of . That is
Elemetary Matrices
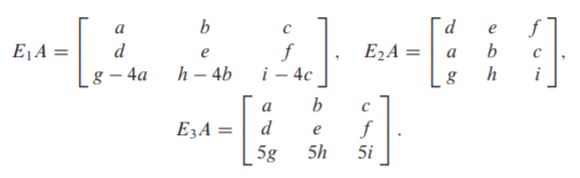
- Elementary matrix란 1장에서 matrix를 echelon form으로 row reduction할때 쓰였던 single elementary row operation을 identity matrix에 수행한 것 이다. 다시말해 identity matrix 에 single elementary row operation 을 수행한 것 이고 다른 matrix에 Left multiplication(pre-multiplication)을 하면 single elementary row operation을 해준 것과 동일하다.
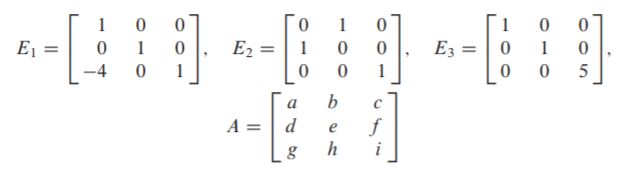
- 위 예시는 각각 replacement, interchange, scaling이며 임의 matrix A에 left multiplication을 해보면 다음과같다.
- 위와같은 elementary matrix 는 invertible하며 의 inverse는 가 identity matrix 에 row operation을 해주는 것이기에 다시 로 다시 돌아가는 operation을 해주면 된다.
Theorme7
An n n matrix A is invertible if and only if A is row equivalent to , and in this case, any sequence of elementary row operations that reduces A to also transforms into
- 위에서 언급된데로 matrix A 가 invertible하다면 elementary matrix를 multiplication해주어 elementary row operation을 해주어 을 만들고 elemetary matrix를 sequence로 나타내주면 inverse를 찾을 수 있다.
Algorithm for finding
-
Row reduce the augmented matrix . If A is row equivalet to , then is row equinalent to . Otherwise, A does not have an inverse.
-
위 설명은 지금까지의 augmented matrix를 로 표현하였는데 vector b대신 identity matrix I로 대신한 것이고 A부분이 I가되도록 계속 row reduction한 것이다.
Example
- Find the inverse of the matrix A, if it exists
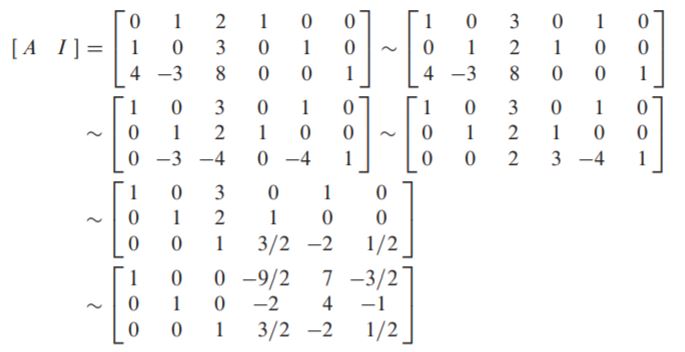
로 두었던 부분을 row reduction을 통해 I로 만들었으니 자리의 matrix가 이 된다.
2.3 Characterizations of invertible matrices
Theorem8
Let A be a square n n matrix. Then the following statements are equivalent.
- a. A is an invertible matrix.
- b. There is an n n matrix C such that CA = I.
- c. The equation Ax = 0 has only the trivial solution.
- d. A has n pivot position.
- e. A is row equivalent to the idientity n n matrix
- f. There is an n n matrix D such that AD = I.
- g. The equation Ax = b has at least one solution for each b in
- h. The columns of A span .
- i. The linear transformation maps onto .
- j. The columns of A form a linearly independent set.
- k. The linear transformation id one-to-one.
- l. is an invertible matrix.
- Invertible linear transformation
- A linear transformation T : is said to be invertible if ther exists a fuction S : such that
2.4 Partitioned Matrices
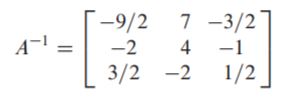
Theorem10
Column-Row Expansion of AB
If A is m n and B is n p, then
- 지금까지는 이런 식으로 A에 B의 column 벡터를 matrix multiplication한 것을 column으로두어서 나열한 표현을 썼었다.
2.5 Matrix Factorization
- Factorization이란 한 matrix를 두개 혹은 이상의 product로 다은과같이 표현하는 것이다.
LU Factorization
2.6 Subspace of
Definition
A subspace if is any set in that has three properties :
- The zero vector is in
- For each and in , the sum is in .
- For each and each scalar c, the vector is in .
- addition 과 scalar multiplication 에 닫혀있고, zero vector를 포함하고있으면 의 subspace가 된다.
Example
and and = Span{} 일때 가 의 subspace임을 보여라
라고 하였을때
위 식을통해 와 는 과 의 linear combination으로 나타내어 addition 과 scalar multiplication 에 닫혀있음을 보일 수 있고음을 보일 수 있고 도 과 의 linear combination이므로 가 zero vector로 포함시켜 위 세가지 조건을 만족시키기에 는 의 subspace라고 할 수 있다.
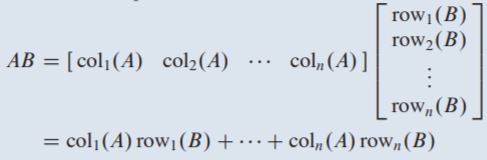
Example
- 위 그림처럼 line 이 원점(origin)을 지나지 않으면 addition 과 scalar multiplication 에 닫혀있지 않으므로 subspace가 될 수 없다.
For in , Span{} is a subspace of
Column Space and Null Space of a Matrix
Column space (Col A)
-
The column space of a matrix A is the set Col A of all linear combinations of the columns of A.
- space의 column vector를 갖고있는 matrix A ( A = [] ) 일때 Col A 는 Span{}과 같은 표현이고 이 column space는 의 subspace이다.
Example
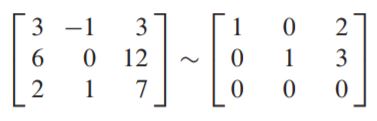
일 때, is in Col A ?
- 위 matrix를 augmented matrix로 row reduce해주면 다음과 같고.

- 위 echelon form을 보면 pivot이 2개여서 A = 가 consistent함을 알 수 있고, 이는 vector 가 matrix의 column vector들의 linear combination으로 나타낼 수 있음을 뜻하므로 in Col A이다. 이를 그림으로 나타내면 다음과 같다.
Null space (Nul A)
- The null space of a matrix A is the set Nul A of all solutions of the homogeneous equation A
Theorem12
The null space of an m x n matrix A is a subspace of . Equivalently, the set of all solutions of a system A of m homogeneous linear equations in n unknowns is a subspace of
- Nul A에 있는 어떤 (homogeneous equation의 임의의 solution) 은 A, A 두 식으로 나타낼 수 있고 이를 통해 A() = A + A = 과 A(c) = A + c(A) = c = 을 통해 addition과 scalar multiplication 에 닫혀 있음을 보임으로 Nul A 는 의 subspace임을 증명 할 수 있다.
Basis for a Subspace
-
A basis for a subspace H of is linearly independent set in H that spans H.
-
Subspace는 무한대의 vector를 포함하고 있어 basis를 통해 최소한의 vector들로 subspace를 표현 할 수 있다.
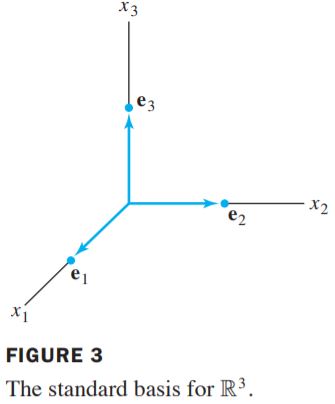
- 위와같은 identity matrix 의 column vector들은 linearly independent set 이며 의 standard basis 라고 한다.
- 물론 도 의 subspace이다.
Example
- Nul A의 basis를 찾아보세요~
- 위 matrix의 homogeneous equation의 solution set은 null space이므로 augmented form으로 reduction해보면 다음과 같고,

- 이를 free variable인 를 통해 vector equation으로 general solution을 표현하면 다음과 같다.
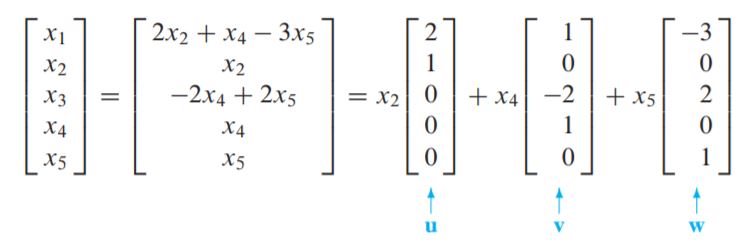
- vector 으로 나타낼 수 있는 linear combination은 Nul A 가 되고 위 linear combination은 자동적으로 trivial solution을 갖기에 (vector 를 0으로 만드는 free variable 는 모두 0이 됨) vector 는 linearly independent set이고 {} 는 Nul A 의 basis 가 된다.
Example
- 이번엔 Col B의 basis를 찾아보세요~
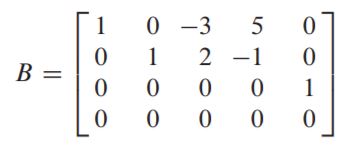
- 위 reduced matrix B의 column들을 라고 하였을 때 당연하게도 아래 식처럼 다른 column들은 pivot column인 의 inear combination으로 표현 할 수 있고
-
pivot column인 는 당연히 linearly independent set이므로 {} 는 Col B 를 span한다.
-
pivot columns of B {}는 Col B의 basis이다.
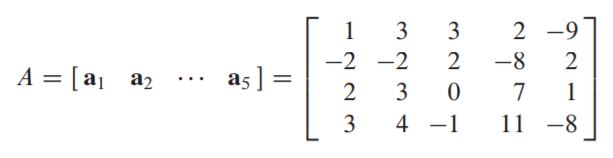
-
위 matrix A을 row reduction하면 matirx B가 되지만 Col A Col B이다.
-
row operation 이라는게 column이 아니라 row간 계산을 수행하므로 pivot column을 바꿀 수 없고 결과적으로 column간 linear dependence 관계에 영향을 미치지는 못한다.
-
결론은 row equivalent한 matrix들은 pivot column들이 동일하여 해당 matrix의 동일 위치의 pivot column들이 column space에 basis가 되긴 하지만 column space들은 동일 공간에 있다고 볼 수 없다.
-
Theorem13
The pivot columns of a matrix A form a basis for the column space of A.
2.7 Dimension and Rank
Coordinate Systems
Definition
Suppose the set = {} is a basis for a subspace H. For each in H the coordinates of x relative to the basis are the weights such that , and the vector in
is called the coordinate vector of x (relative to ) or the -coordinate vector of x
- basis 라는 것은 일반적인 좌표계가 아닌 basis에 대한 좌표계를 나타내며 위 definition은 basis가 주어졌을 때 H의 특정 vector 를 나타내는 weights(coefficient) 는 unique하다는 것을 나타낸다.
Example
- vector 가 subspace H = Span{}에 있는지 보이고 -coordinate vector of 를 구해라

-
일단 는 서로 scalar 곱으로 표현될 수 없어서 linearly independent하고 subspace H의 basis가 될 수 있다.
-
위 vector들을 augmented matirx로 reduction하면 다음과 같고
- vector equation 일 때 이므로 이 되며 basis 는 subspace H의 "coordinate system"이 된다. 그림으로 나타내면 다음과 같다.
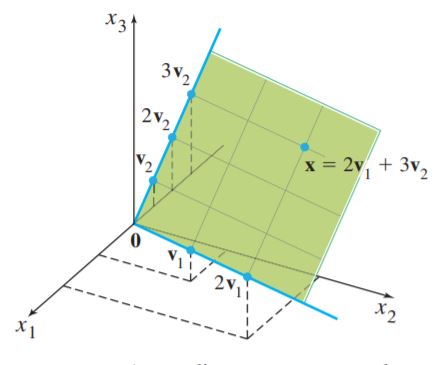
- 위 그림에서 보다시피 basis의 vector들()은 에 있지만 subspace H에있는 들은 cordinate vector에 의해 마치 에 있는것 처럼 동작한다 이를 H is isomorphic to 이라고 부른다.
The Dimension of a Subspace
Definition
The dimension of a nonzero subspace H, denoted by dim H, is the number of vectors in any basis for H. The dimension of the zero subspace {} is defined to be zero.
-
nonzero subspace H의 basis는 여러개일 수 있지만 dimension은 똑같다는 소리.
-
space는 n dimension을 갖고 모든 의 모든 basis는 n개의 vector를 갖는다.
- 이때 0을 지나는 subspace가 평면이면 two-dimensional이고, line이면 one-dimensional이다.
Rank
definition
The rank of a matrix A, denoted by rank A, is the dimension of the column space of A.
Example
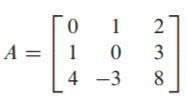
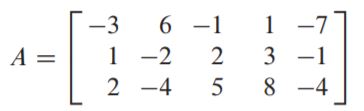
- 아래 matrix A의 rank는????
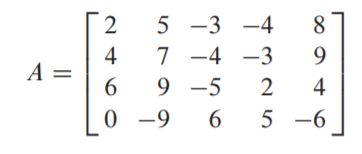
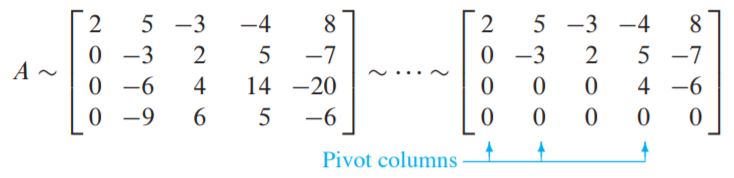
- 우선 rank A는 Col A의 basis의 dimension을 말하므로 matrix의 echelon form을 구하면
-
row reduction한 echelon form은 3개의 pivot column이 있는걸 알 수 있고 이는 원래의 matrix A의 pivot column과 위치가 같으므로 rank A = 3 임을 알 수 있다.
-
이때 A = 은 두개의 free variable을 갖는데 이는 5개 column중 2개의 non-pivot column이 있다는 것을 통해 바로 알 수 있고 로 general solution의 vector equation을 나타낼 수 있는데 이를 통해 null space A의 dimension (dim Nul A)는 free variable의 개수와 같은 것을 알 수 있다.
<Theorem 14> The Rank Theorem
if a matrix A has n columns, then rank A C dim Nul A D n
<Theorem 15> The Basis Theorem
Let H be a -dimensional subspace of . Any linearly independent set of exactly elements in H is automatically a basis for H. Also, any set of elements of H that spans H is automatically a basis for H.
The Invertible Matrix Theorem (cont'd)
- m. The columns of A form a basis of .
- n. Col A =
- o. dim Col A = n
- p. rank A = n
- q. Nul A = {} : null space가 zero vector밖에 없고 trivial solution을 갖는다는 소리.
- r. dim Nul A = 0
