Deep Learning
Single Layer Neural Network
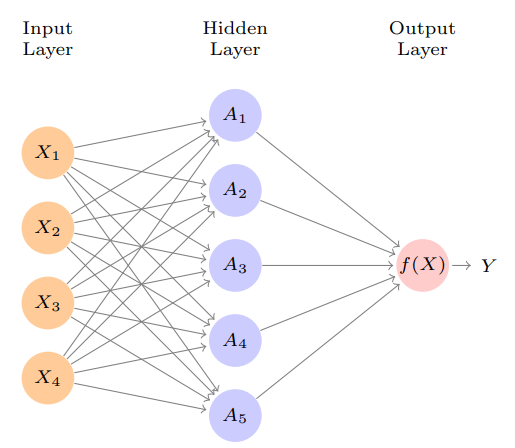
- are called the
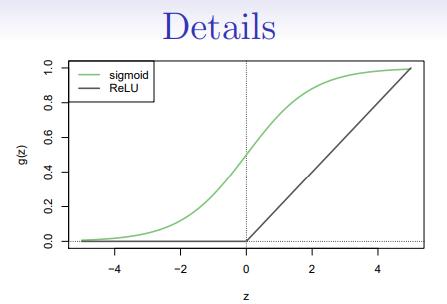
activationsin thehidden layer - is called the
activation function. Popular are thesigmoidandrectified linear, shown in figure - Activation functions in hidden layers are typically
nonlinear, otherwise the model collapses to a linear model - So the activations are like derived features - nonlinear transformations of linear combinations of the features
- The model is fit by minimizing (e.g. for regression)
Example : MNIST Digits
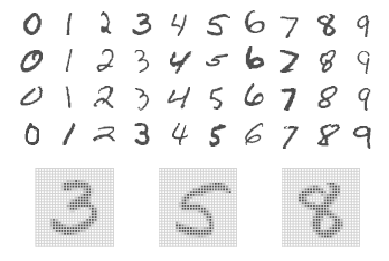
- Handwritten digits grayscale images train, test images
- Features are the pixel grayscale values
- Labels are the digit class
- Goal : build a classifier to predict the image class
- We build a two-layer network with units at first layer, units at second layer, and units at output layer
- Along with intercepts (called
biases) there are parameters (referred to asweights)
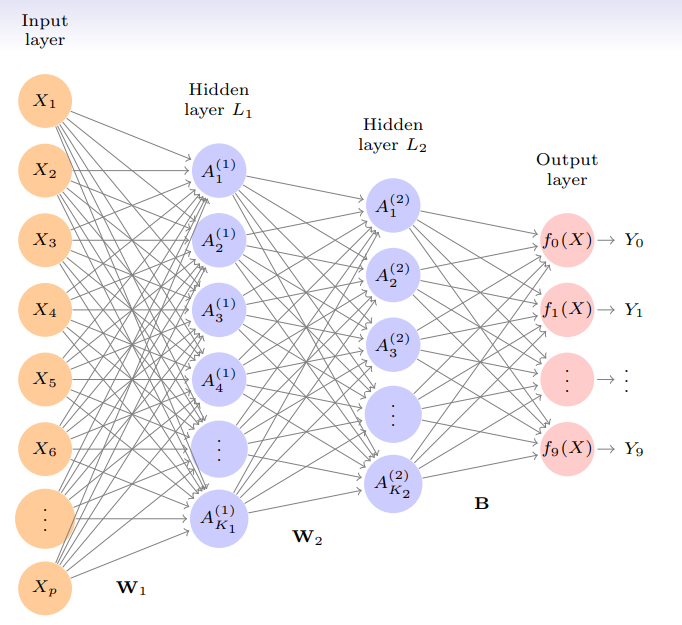
- Let be linear combinations of activations at second layer
- Output activation function encodes the
softmaxfunction - We fit the model by minimizing the negative multinomial log-likelihood (or cross-entropy)
- is if true class for observation is , else - i.e.
one-hot encoded
- Early success for neural networks in the 1990s
- With so many parameters, regularization is essential
- Some details of regularization and fitting will come later
- Very overworked problem - best reported rates are <
- Human error rate is reported to be aroung
Convolutional Neural Network - CNN
- Major success story for classifying images
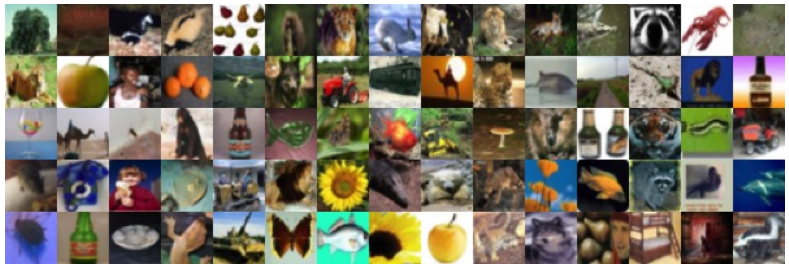
- Shown are samples from
CIFAR100database - color natural images, with classes
- training images, test images
- Each image is a three-dimensional array of
feature map: array of -bit numbers - The last dimension represents the three color channels for red, green and blue
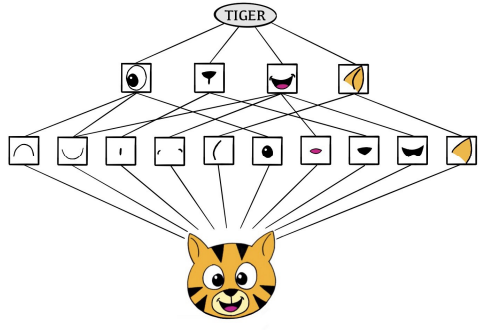
- The
CNNbuilds up an image in a hierarchical fashion - Edges and shapes are recognized and pieced together to form more complex shapes, eventually assembling the target image
- This hierarchical construction is achieved using
convolutionandpoolinglayers
Convolution Filter
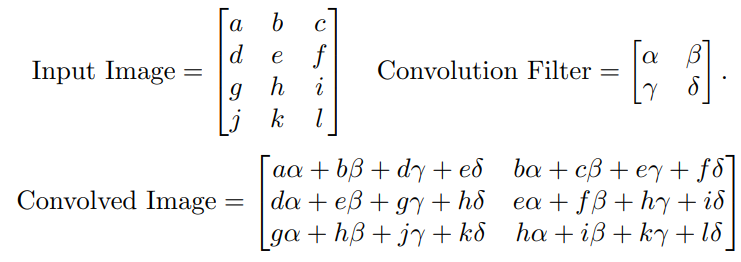
- The filter is itself an image, and represents a samll shape, edge etc.
- We slide it around the input image, scoring for matches
- The scoring is done via
dot-products, illustrated above - If the subimage of the input image is similar to the filter, the score is high, otherwise low
- The filters are
learnedduring training
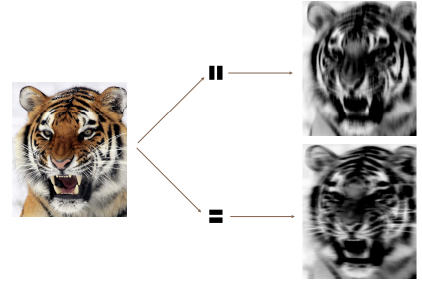
- The idea of convolution with a filter is to find common patterns that occur in differnet parts of the image
- The two filters shown here highlight vertical and horizontal stripes
The resultof the convolution is anew feature map- Since images have three colors channels, the filter does as well : one filter per channel, and dot-products are summed
- The weights in the filters are
learnedby the network
Pooling
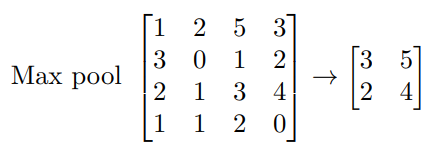
- Each non-overlapping block is replaced by its maximum
- This sharpens the feature identification
- Allows for locational invariance
- Reduces the dimension by a factor of - i.e. factor of in each dimension
Architecture of a CNN
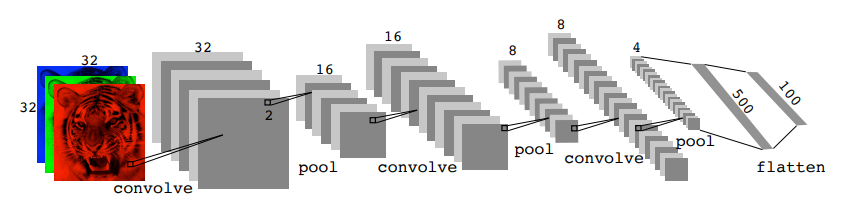
- Many
convolve+poollayers - Filters are typically small, e.g. each channel
- Each filter creates a new channel in convolution layer
- As pooling reduces size, the number of filters/channels is typically increased
- Number of layers can be very large. E.g.
resnet50trained onimagenet1000-class image data base has layers
Document Classification
Featurization : Bag-of-Words
- Documents have different lengths, and consist of sequences of words
- How do we create features to characterize a document?
- From a dictionary, identify the most frequently occurring words
- Create a binary vector of length for each document, and score a in every position that the corresponding word occurred
- With documents, we now have a
sparsefeature matrix - We compare a
lassologistic regression model to atwo-hidden-layerneural network on the next slide Bag-of-wordsareunigrams- We can instead use
bigrams( occurrences of adjacent word pairs ), and in generalm-grams
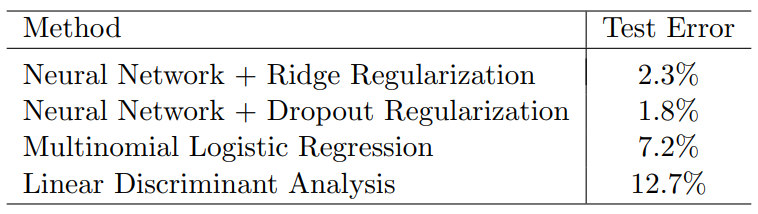
Lasso vs Neural Network
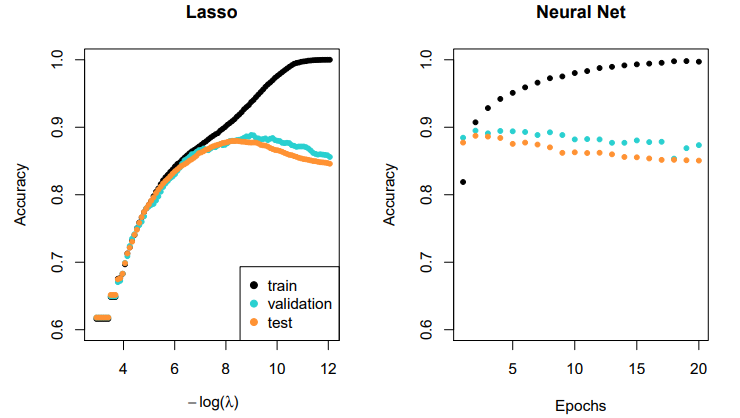
- Simpler
lassologistic regression model works as well as neural network in this case
Recurrent Neural Networks
- Often data arise as sequences :
- Documents are sequences of words, and their relative positions have meaning
- Time-series such as weather data or financial indices
- Recorded speech or music
- Handwriting, such as doctor's notes
RNNs build models that take into account this sequential nature of the data, and build a memory of the past- The feature for each observation is a
sequenceof vectors - The target is often of the usual kind - e.g. a single variable such as
Sentiment, or a one-hot vector for multiclass - However, can also be a sequence, such as the same document in a differnet language
- The feature for each observation is a
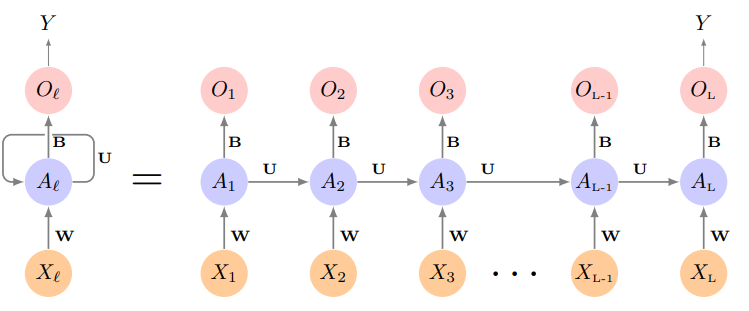
- The hidden layer is a sequence of vectors , receiving as input as well as
- produces an output
- The
sameweights , and are used at each step in the sequence - hence the termrecurrent - The sequence represents an evolving model for the response that is updated as each element is processed
- Suppose has components, and has components
- Then the computation at the th components of hidden unit is
- Often we are concerned only with the prediction at the last unit
- For squared error loss, and sequence / response pairs, we would minimize
RNN and IMDB Reviews
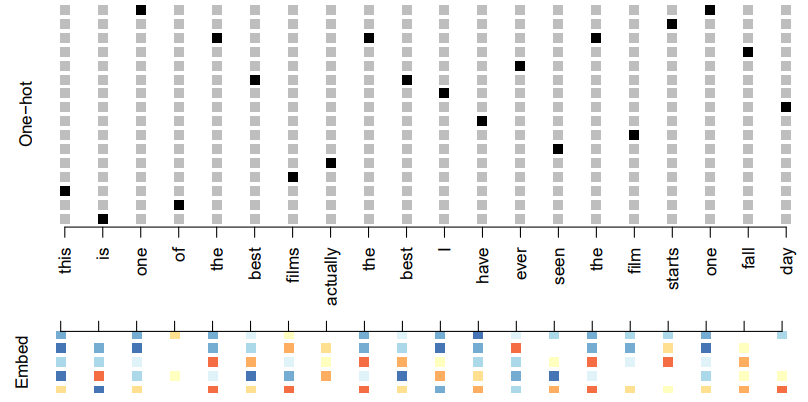
- The document feature is a sequence of words
- We typically truncate/pad the documents to the same number of words (we use )
- Each word is represented as a
one-hot encodedbinary vector of length , with all zeros and a single one in the position for that word in the dictionary - This results in an extremely sparse feature representation, and would not work well
- Instead we use a lower-dimensional pretrained
work embeddingmatrix - This reduces the binary feature vector of length to a real feature vector of dimension (e.g. in the low hundreds)
Word Embedding
- Embeddings are pretrained on very large corpora of documents, using methods similar to principal components
word2vecandGloVeare popular
- After a lot of work, the results are a disappointing accuracy
- We then fit a more exotic
RNNthan the one displayed - aLSTMwithlong and short term memory - Here receives input from (short term memory) as well as from a version that reaches further back in time (long term memory)
- Now we get accuracy, slightly less than the achieved by
glmnet - These data have been used as a benchmark for new
RNNarchitectures - The best reported result found at the time of writing (2020) was aroung
- We point to a leaderboard
Time Series Forecasting
New-York Stock Exchange Data
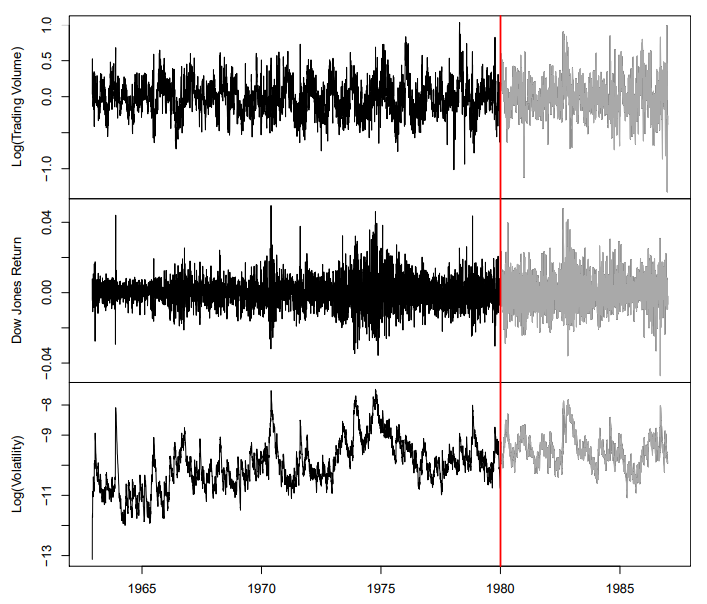
- Shown in previous slide are three daily time series for the period trading days
Log trading volume: This is the fraction of all outstanding shares that are traded on that day, relative to a -day moving average of past turnover, on the log scaleDow Jones return: This is the difference between the log of theDow JonesIndustrial Index on consecutive trading daysLog volatility: This is based on the absolute values of daily price movements
- Goal : predict
Log trading volumetomorrow, given it observed values up to today, as well as those ofDow Jones returnandLog volatility
Autocorrelation
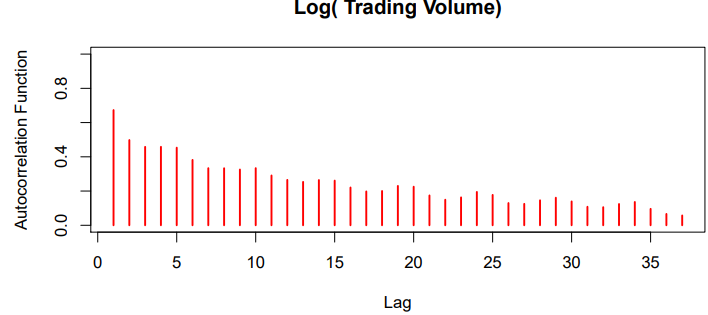
- The
autocorrelationat lag is the correlation of all paris that are trading days apart - These sizable correlations give us confidence that past values will be helpful in predicting the future
- This is a curious prediction problem : the response is also a feature
RNN Forecaster
- We only have one series of data
- How do we set up for an
RNN - We extract many short mini-series of input sequences with a predefined length known as the
lag - Since , with we can create such pairs
- We use the first as training data, and the following as test data
- We fit an
RNNwith hidden units per lag step (i.e. per )
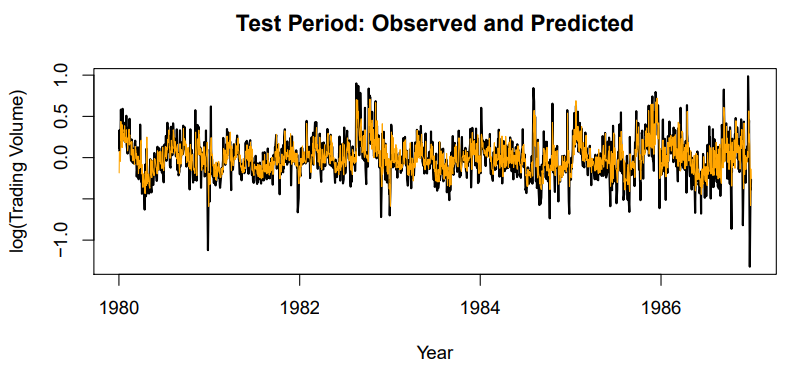
- Figure shows predictions and truth for test period
- for
RNN - for
straw man- use yesterday's value ofLog trading volumeto predict that of today
Autoregression Forecaster
- The
RNNforecaster is similar in structure to a traditionalautoregressionprocedure - Fit an
OSLregression of on , giving - Known as an
order-L autoregressionmodel or - For the
NYSEdata we can include lagged version ofDJ_returnandlog_volatilityin matrix , resulting in columns
- for model ( parameters)
- for
RNNmodel ( parameters) - for model fit by neural network
- for all model if we include
day_of_weekof day being predicted
Non Convex Functions and Gradient Descent
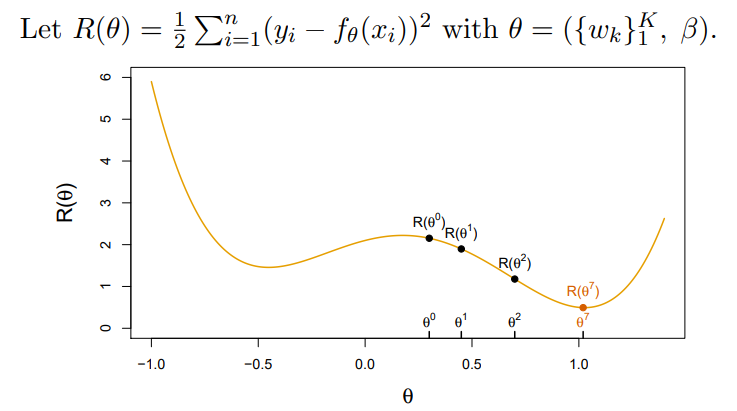
- Start with a guess for all the parameters in , and set
- Iterate until the objective fails to decrease :
2.1. Find a vector that reflects a small change in , such thatreducesthe objective
2.2. Set
- In this sample example we reached the
global minimum - If we had started a little to the left of we would have gone in the other direction, and ended up in a
local minimum - Although is multi-dimensional, we have depicted the process as one-dimensional
- It is much harder to identify whether one is in a
local minimumin high dimensions - How to find a direction that point downhill?
- We compute the
gradient vector - i.e. the vector of
partial derivativesat the current guess - The gradient points uphil, so our update is orwhere is the
learning rate(typically small, e.g. )
Gradients and Backpropagation
is a sum, so gradient is sum of gradients
- For ease of notation, let
Backpropagationuses the chain rule for differentitaion
Tricks of the Trade
Slow learning
Gradient descent is slow, and a small learning rate slows it even further. Withearly stopping, this is a form of regularizationStochastic gradient descent
Rather than compute the gradient usingallthe data, use a smallminibatchdrawn at random at each step- An
epochis a count of iterations and amounts to the number of minibatch updates such that samples in total have been processed; i.e. forMNIST Regularization
Ridge and lasso regularization can be used to shrink the weights at each layer. Two other popular forms of regulariztion anddropoutandaugmentation
Droupout Learning
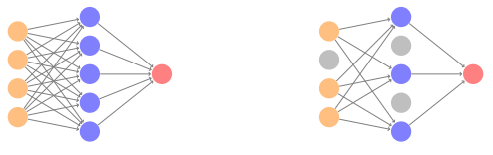
- At each
SGDupdate, randomly remove units with probability , and scale up the weights of those retained by to compensate - In simple scenarios like linear regression, a version of this process can be shown to be equivalent to ridge regularization
- As in ridge, the other units
stand infor those temporaily removed, and their weights are drawn closer together - Similar to randomly omitting variables when growing trees in random forests
Ridge and Data Augmentation
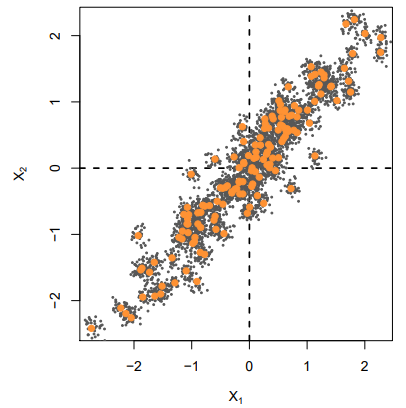
- Make many copies of each and add a small amount of Gaussian noise to the - a little cloud around each observation - but
leave the copies ofalone - This makes the fit robust to small perturbations in , and is equivalent to
ridgeregularization in anOLSsetting
Double Descent
- With neural networks, it seems better to have too many hidden units than too few
- Likewise more hidden layers better than few
- Running stochastic gradients descent till zero training error often gives good out-of-sample error
- Increasing the number of units or layers and again training till zero error sometimes gives
even betterout-of-sample error
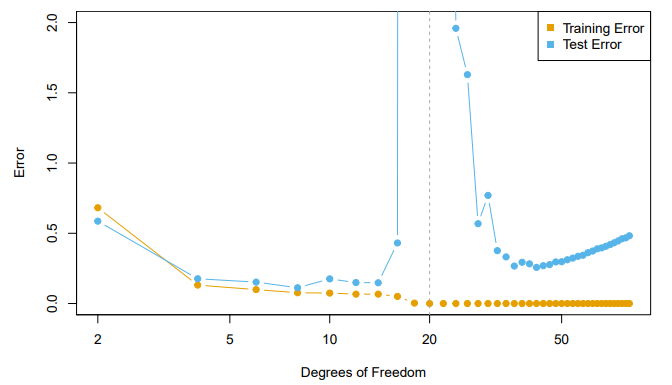
- When , model is OLS, and we see usual bias-variance trade-off
- When , we revert to minimum-norm
- As increases above ,
decreasessince it is easier to achieve zero error, and hence less wiggly solutions
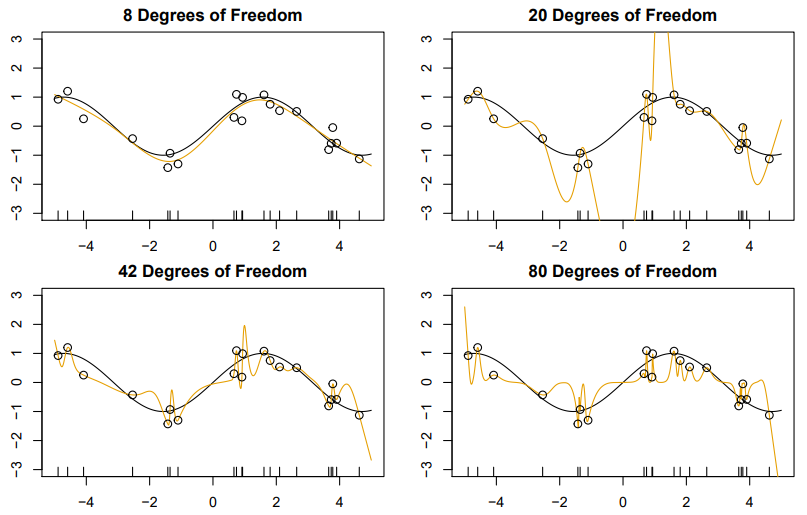
- To achieve a zero-residual solution with is a real stretch
- Easier for larger
- In a wide linear model () fit by least squares,
SGDwith a small step size leads to aminimum normzero-residual solution Stochastic gradient flow- i.e. the entire path ofSGDsolutions - is somewhat similar to ridge path- By analogy, deep and wide neural networks fit by
SGDdown to zero training error often give good solutions that generalize well - In particular cases with
high signal-to-noise ratio- e.g. image recognition - are less prone to overfitting; the zero-error solution is mostly signal

AI, Security