3D Geometry Study_Week4(�Calibration)
Cholesky decomposition
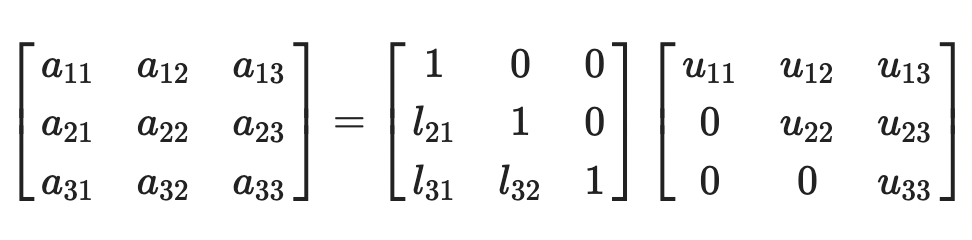
- LU분해는 위 그림과 같이 lower trianguler matrix와 upper triangular matrix로 분해하는 것을 의마한다.
- A=LU에서 A가 symmetric matrix라면 A=AT이므로 A=LLT=LTL과 같은 형태로 분해하여 LU분해와 같은 형태를 만드는 것을 생각해볼 수 있다.
- 단, 이 때 A는 semi-positive definite 행렬이어야 한다.
- 행렬 L과 임의의 벡터 x의 곱 Lx의 L2-norm은 항상 0 이상의 값을 가진다.
- ∣Lx∣2=(Lx)T(Lx)=xTLTLx로 표현할 수 있고 LTL을 행렬 A라고 하면 xTAx≥0이 된다.
- 위와 같은 성질을 만족할 때 semi positive definite 행렬이라 하므로 A의 조건이 된다.
Calibration
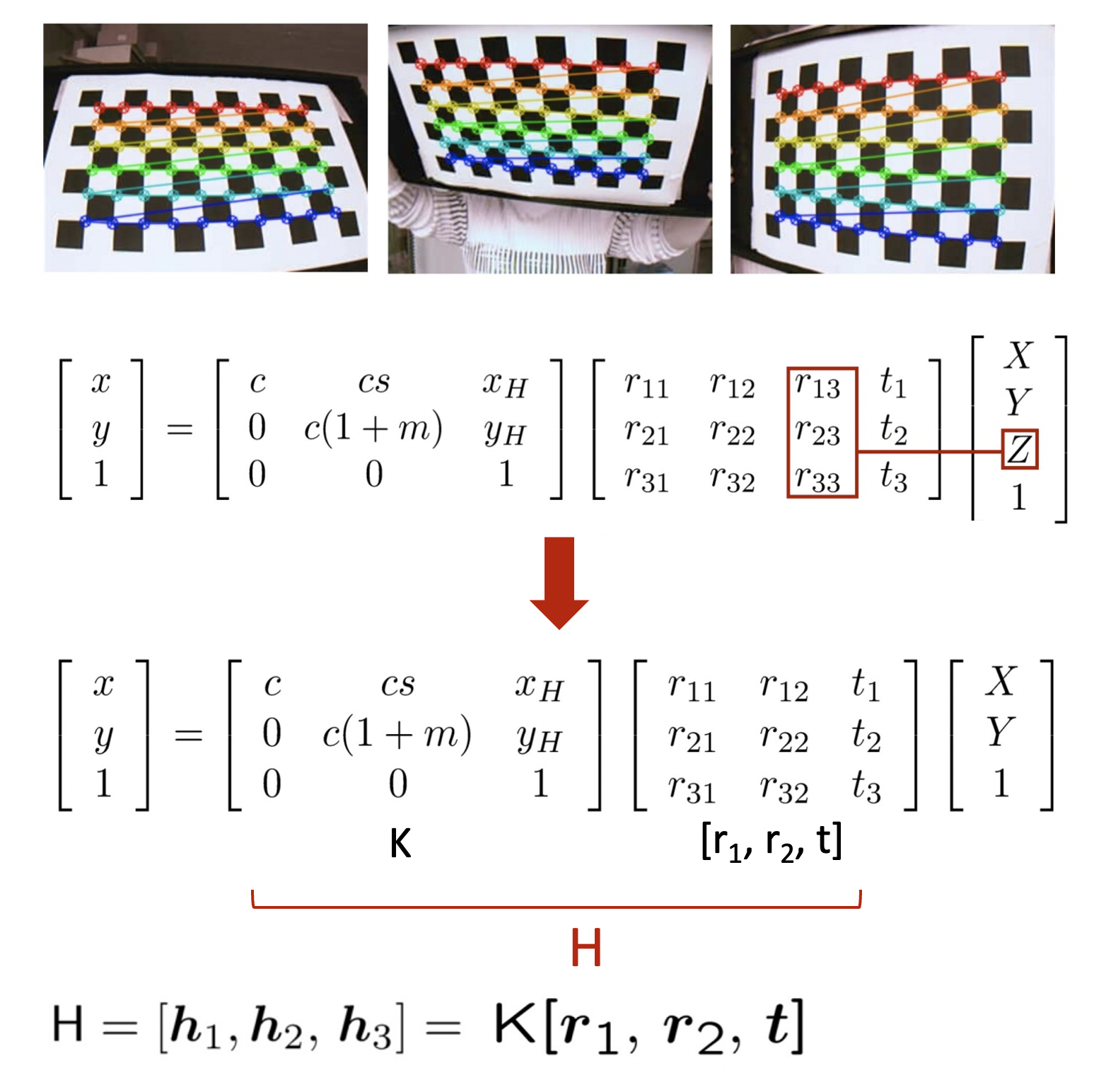
- World coordinate system을 xy plane의 체크보드의 코너로 설정하여 Z=0이 된다.
- 따라서, Z축에 대한 rotation parameters와 Z는 제거할 수 있으며 이 경우 완전한 rotation matrix가 아니므로 QR분해를 통해 DLT를 할 수 없다.
- Homography H는 scale을 제외한 8개의 DoF를 가지므로 4개의 쌍의 매칭점이 필요하다.
- [h1,h2,h3]=K[r1,r2,t]로부터 K−1[r1,r2,t]=[h1,h2,h3]가 되므로 식1을 얻을 수 있으며 r1과 r2가 orthonormal하므로 식2를 얻을 수 있다.
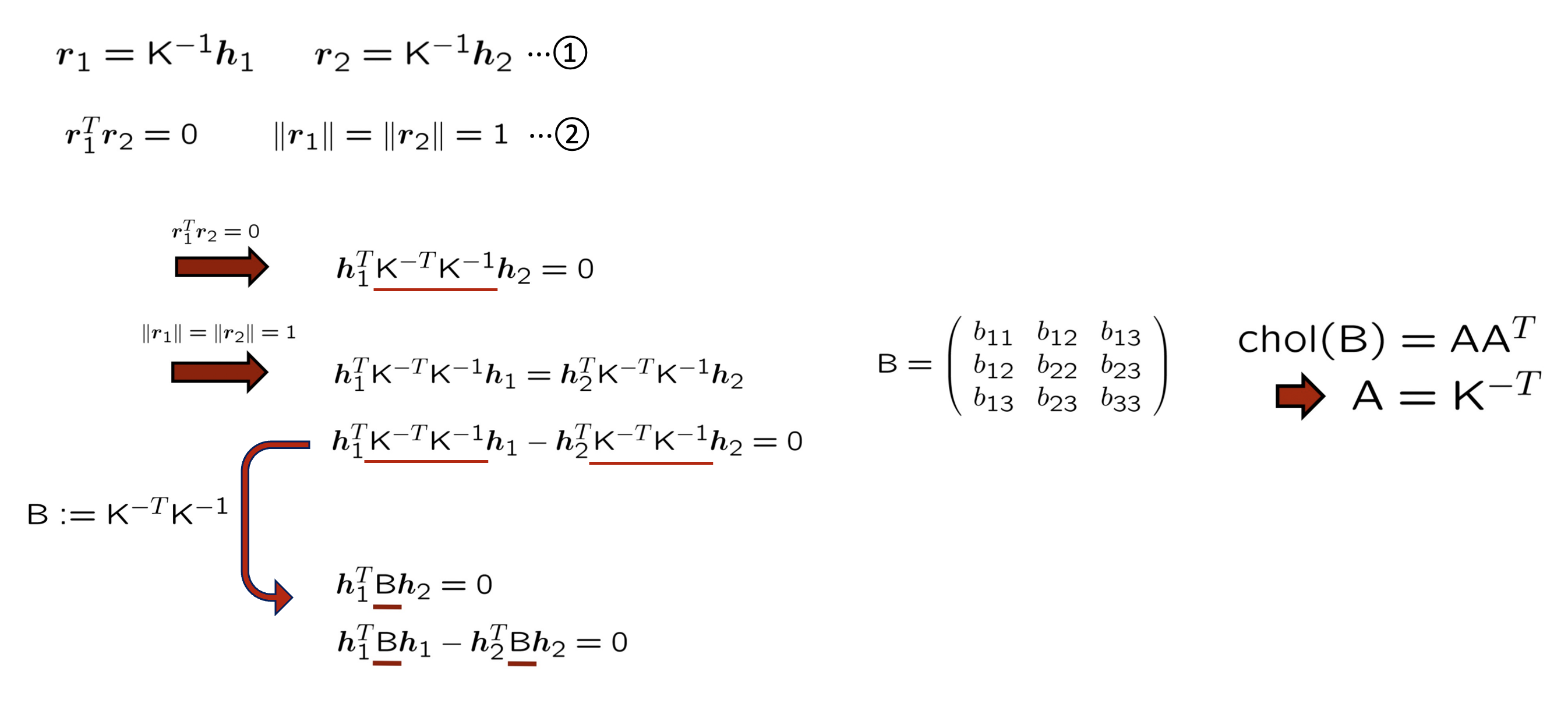
- 위 식들로부터 알고 있기 때문에 계수로 볼 수 있는 h와 모르는 파라미터로 이루어진 K에 대한 두 개의 방정식을 얻을 수 있으며 K−TK−1를 B로 치환한다.
- B는 symmetric and positive definite matrix이므로 cholesky decomposition이 가능하며 따라서 B를 알면 K를 계산할 수 있다.
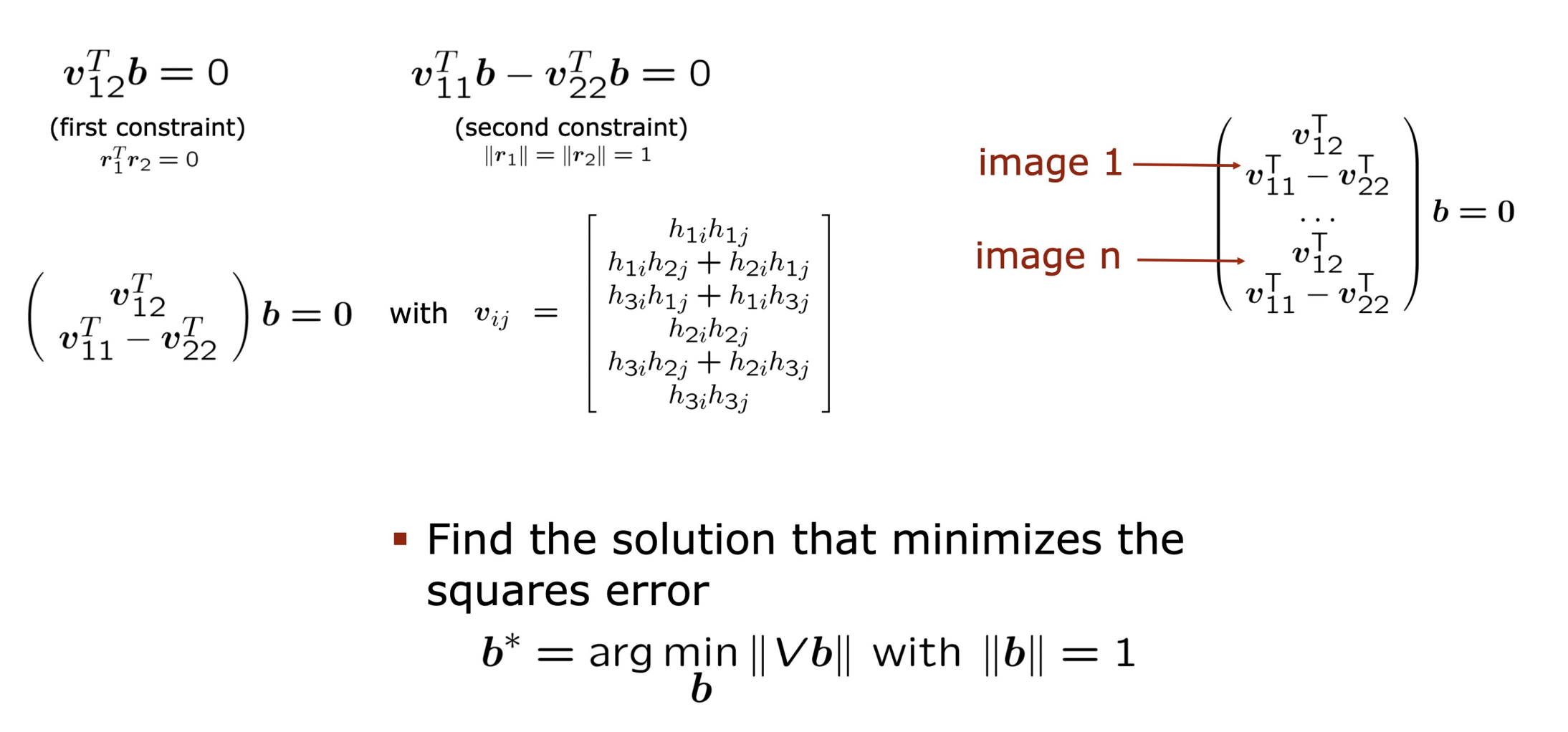
- 위의 두 제약식을 v와 b에 대한 식으로 정리할 수 있다.
- 이미지가 n개 일 때 2n×6의 matrix V가 나오며 Vb=0을 SVD를 통해 풀어 b를 구한다.
강의
Reference
