3D Geometry Study_Week4(DLT)
Estimating the Parameters of P
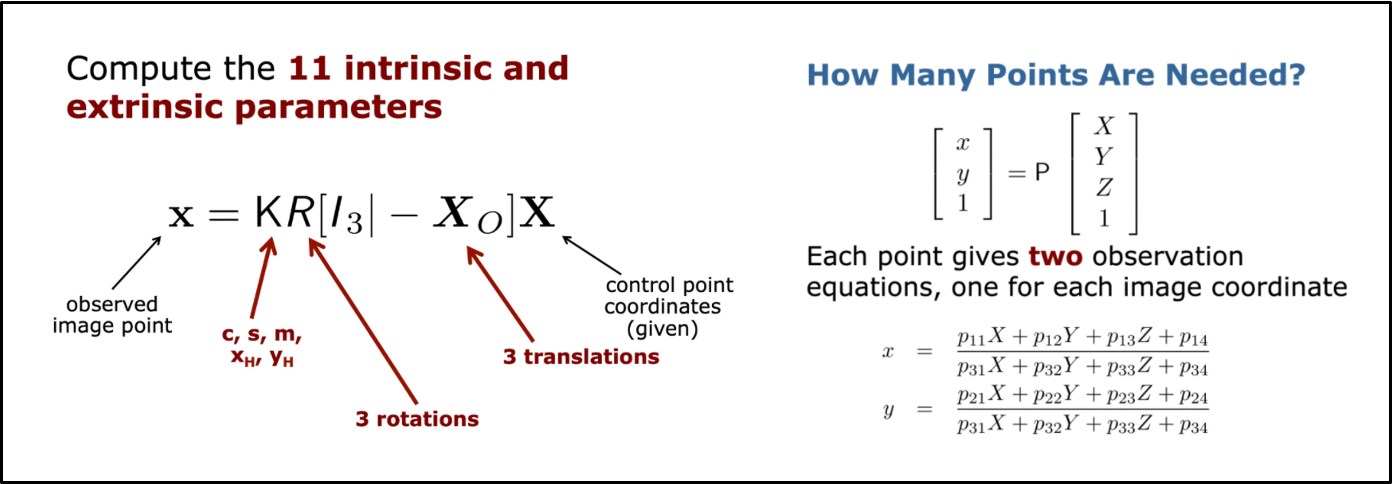
- World 좌표계로부터 image plane 상의 2D point를 구하기 위해서는 5개의 intrinsic parameters와 6개의 extrinsic parameters가 필요하다.
- 하나의 매칭쌍으로부터 2개의 식이 도출되므로 최소 6쌍의 매칭점이 필요하다.
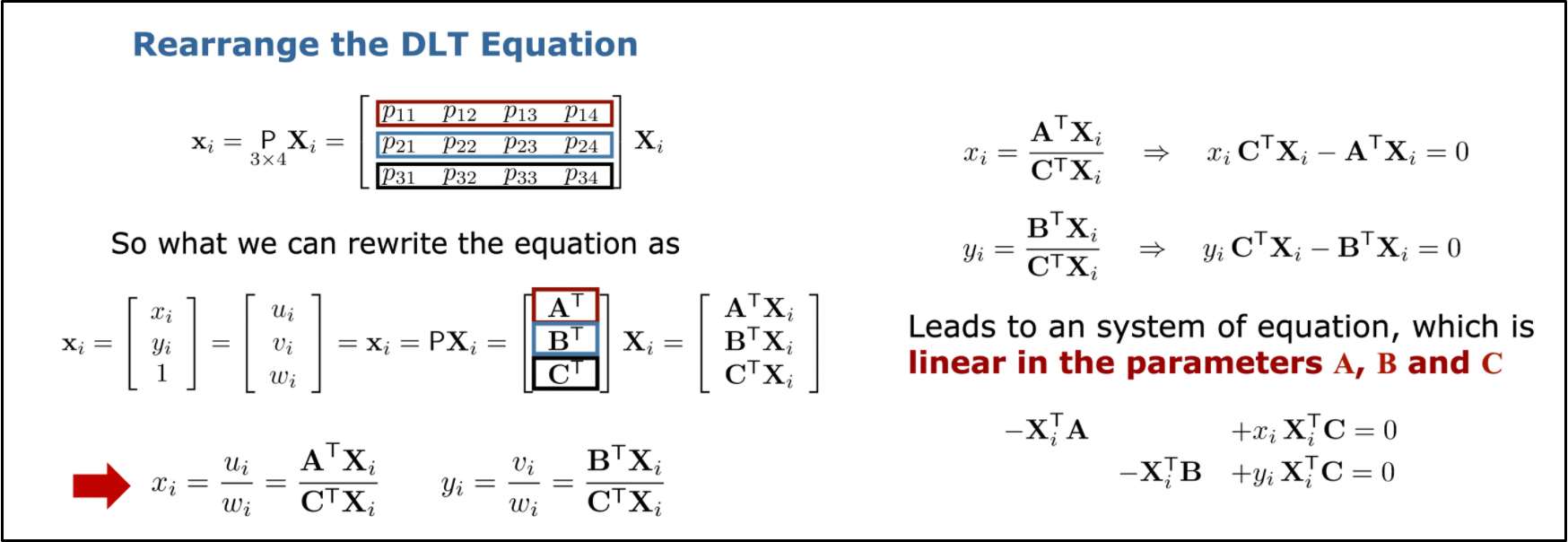
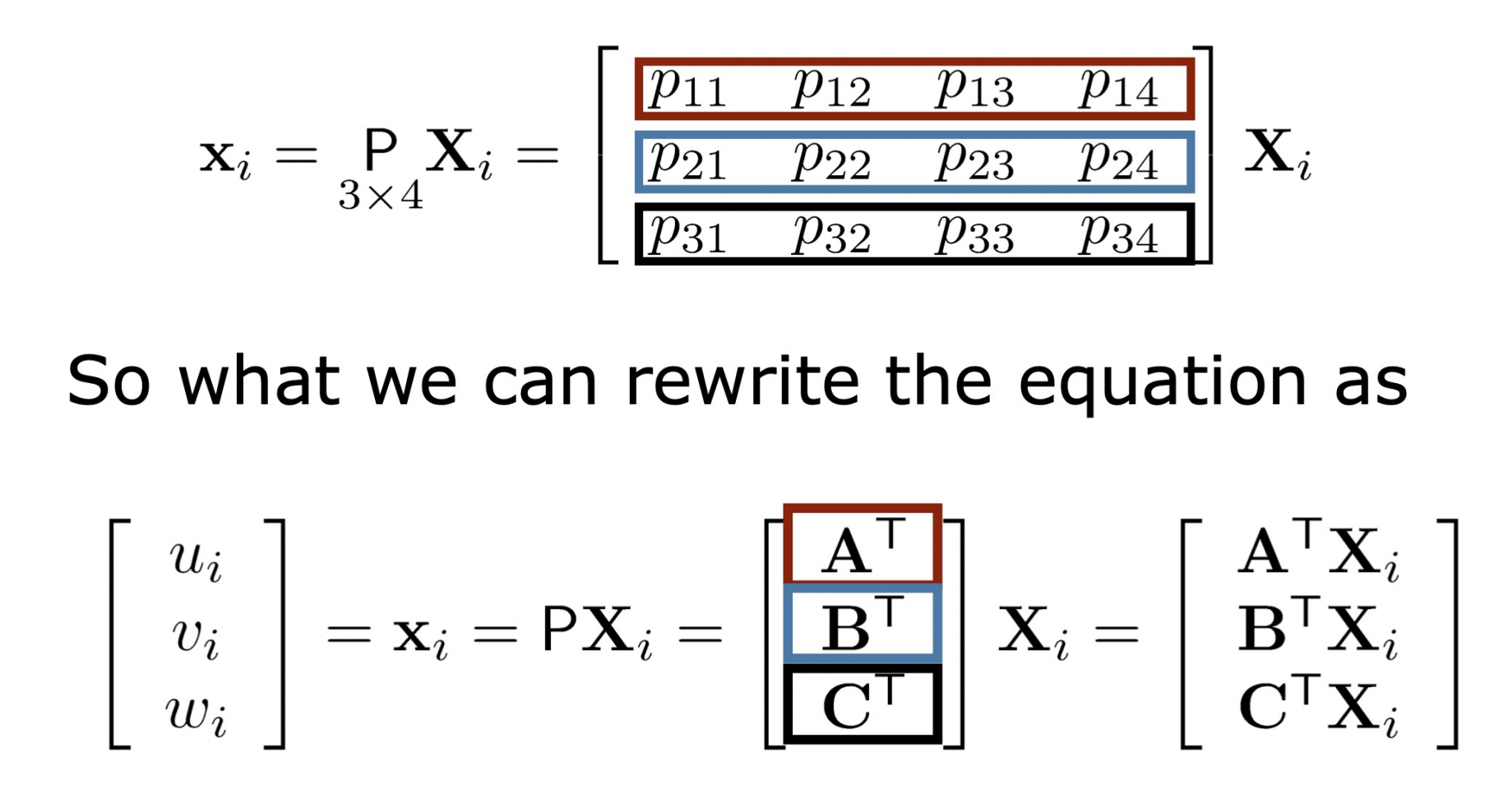
- 행렬 P의 각 행을 A,B,C 벡터로 치환하고 식을 풀면 A,B,C에 대한 선형식을 얻을 수 있다.
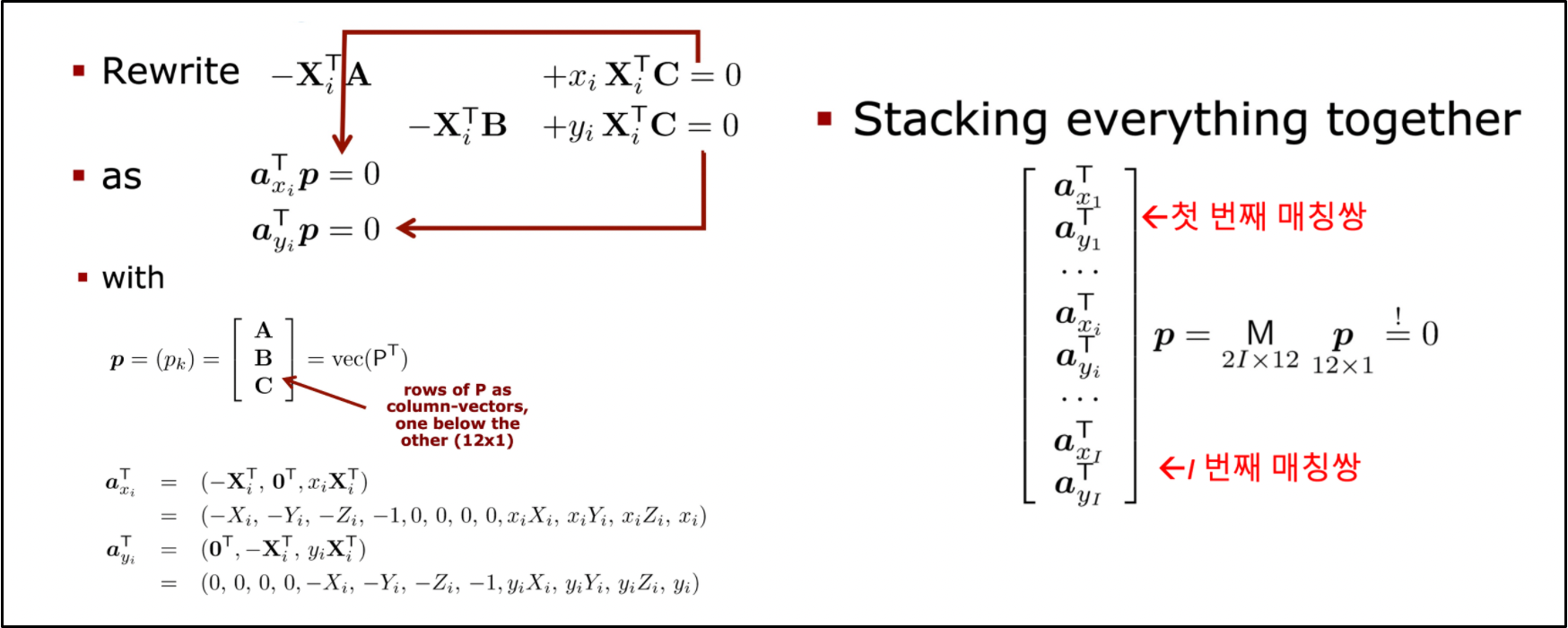
- A,B,C를 stacking하여 12x1의 열벡터 p로 만들어주고 선형식의 계수에 해당하는 부분을 axiT,ayiT로 표기한다.
- I개의 매칭쌍을 stacking하여 표기하면 2I×12의 행렬 M으로 나타낼 수 있으며 Ax=0의 형태가 나와 SVD를 통해 풀 수 있다.
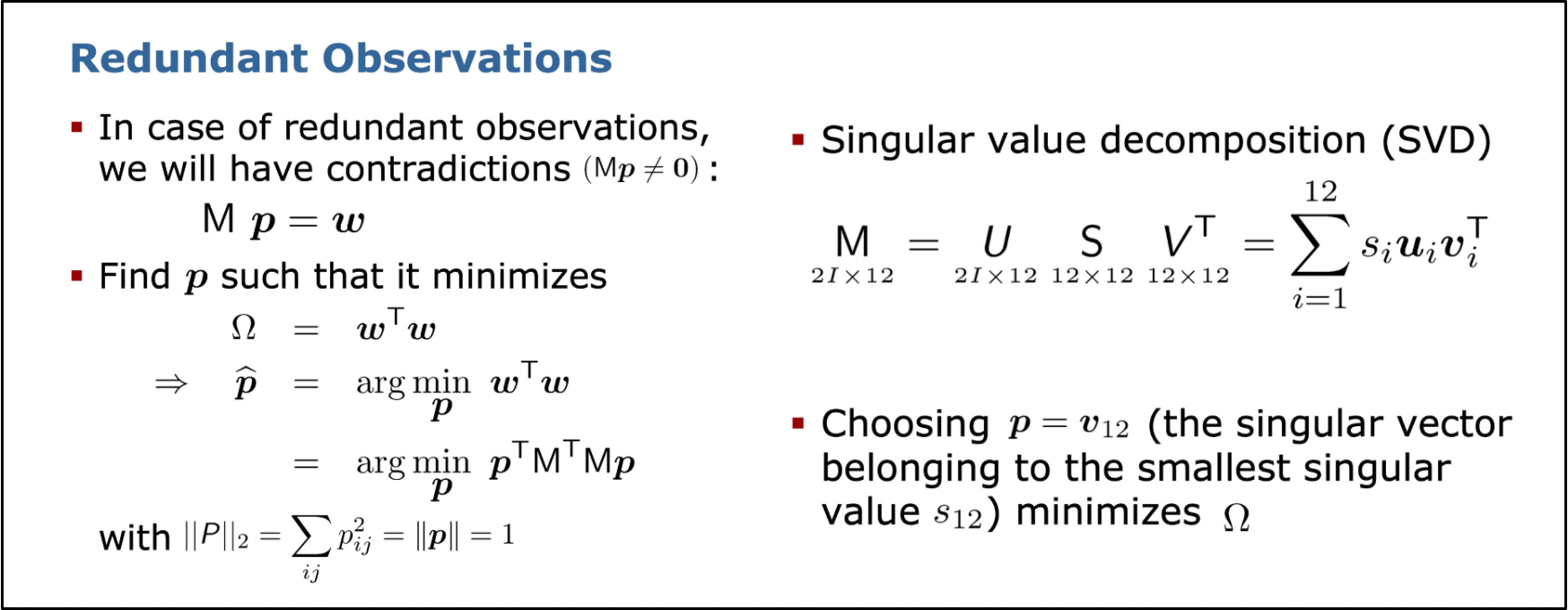
- 하지만 우변은 오차들로 인해 0이 아니 w값을 가지게 되며 따라서 우리의 목표는 wTw를 최소화하는 p를 찾는 것이 된다.
- SVD를 통해 M을 분해하며 singular value는 내림차순으로 정리되어 있으므로 가장 작은 singular value를 가지는 v12가 wTw를 최소화하는 벡터가 된다.
Decomposition of P
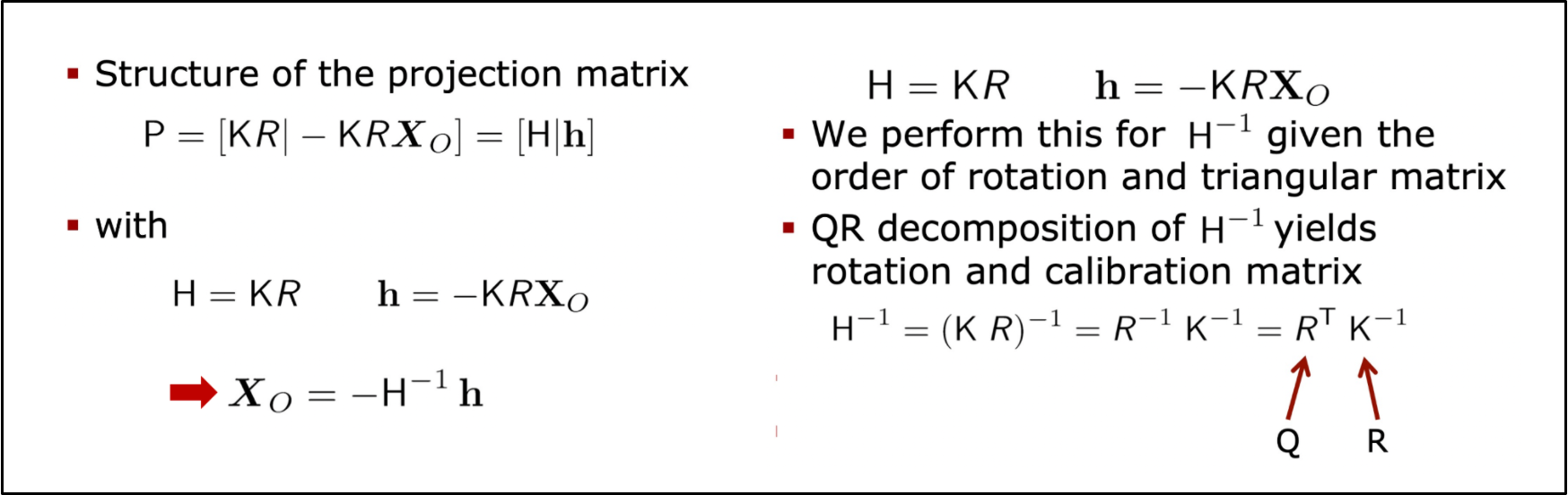
- H=KR,h=−KRXO로 정의하면 P=[H∣h]로 표현되며 XO 또한 두 식의 연립으로 −H−1h로 구할 수 있다.
- K는 upper triangular matrix이고 R은 orthogonal matrix이므로 QR분해를 활용할 수 있으나 두 matrix의 순서가 반대되므로 변형식이 필요하다.
- K−1과 R−1 모두 upper triangular과 orthogonal이라는 특성을 유지하므로 H−1를 QR분해하여 K와 R을 도출할 수 있다.
