3D Vision(NUS) - Lecture 1
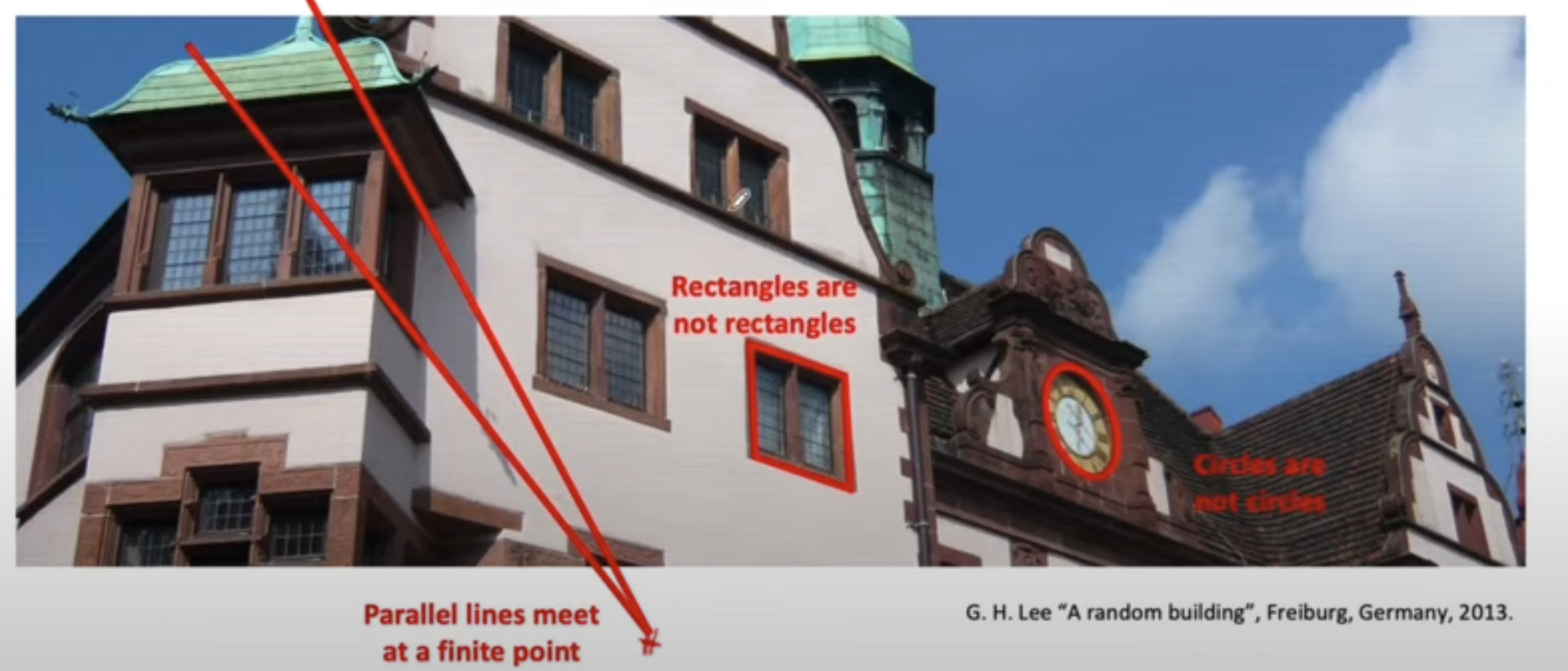
- 3D world에서의 object를 이미지로 mapping 하는 것은 projective transformation의 하나의 예시이다.
- 이미지 상에서 사각형은 사각형이 아니고 원은 원이 아니며 평행한 선이 어떤 점에서 만나게 된다.즉, 각도, 거리, 거리비 등 geometric한 특성이 보존되지 않는다.
- 단, straightness는 유지된다. 직선은 mapping 해도 직선이다.
Euclidean vs Projective
- Euclidean geometry는 synthetic geometry의 예로 컴퍼스나 자를 이용하는 axiomatic(자명한) 방식이다.
- Projective geometry는 coordinate과 algebra를 이용하는 anlytic geometry이며 infinity를 표현할 수 있다.
Homogenous Coordinates
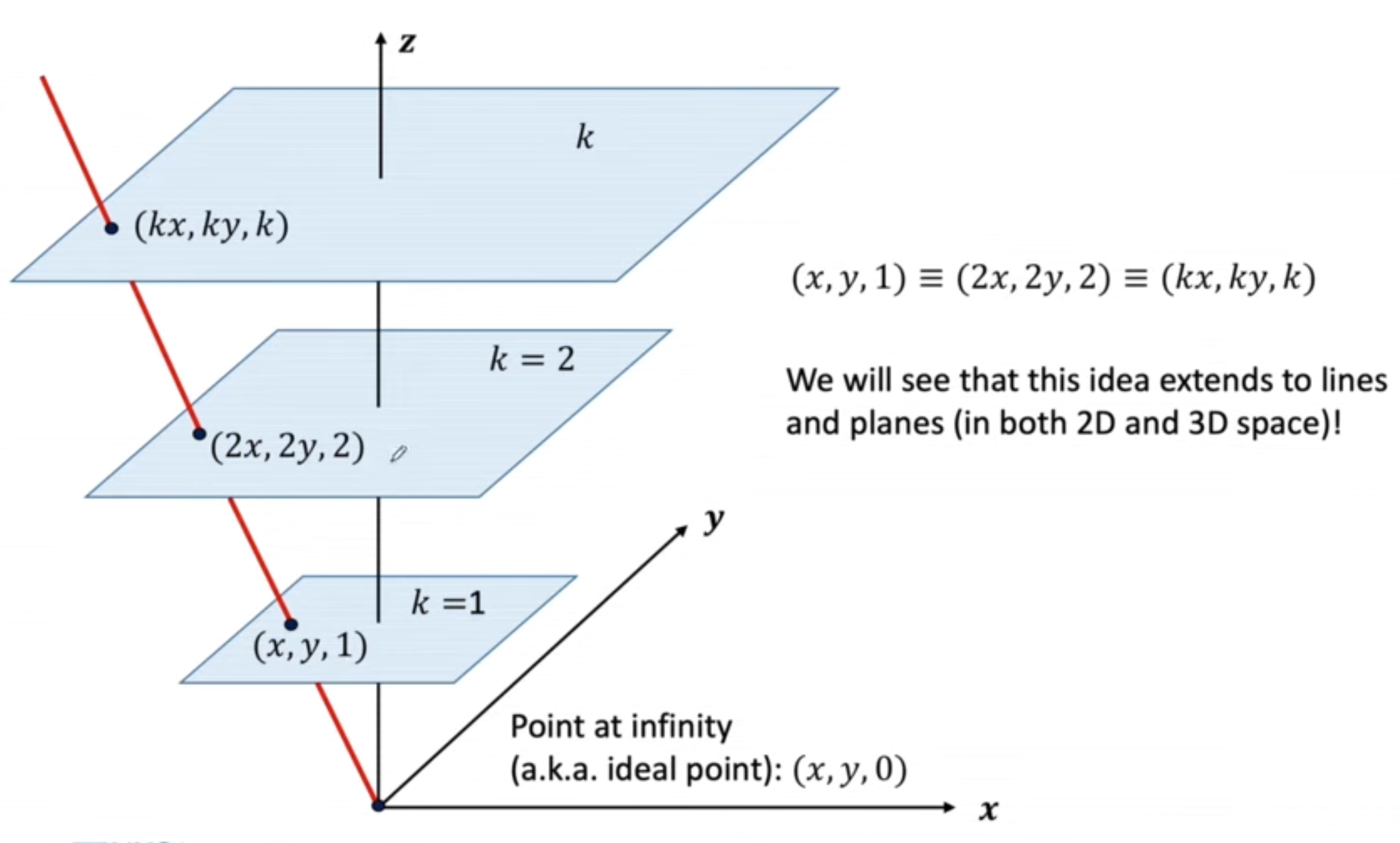
- Homogenous 좌표 (kx,ky,k)는 cartesian 좌표 (kkx,yky)=(x,y)와 같으며 모든 k에 대해 동일하다.
- k=0 일 때 (0x,0y)이므로 point at infinity(ideal point)를 의미하게 된다.
- Euclidean space Rn이 projective space Pn으로 확장된다고 볼 수 있다.
The 2D Projective Plane
- Plane에 있는 line은 ax+by+c=0으로 표현된다. 변형하면 y=−bax−c로 익숙한 선에 대한 방정식 형태가 된다.
- 따라서 line은 벡터 (a,b,c)T로 표현할 수 있다.
Homogenous Representation of Lines and Points
- ax+by+c=0과 (ka)x+(kb)y+(kc)=0은 동일하기 때문에 벡터 (a,b,c)T와 line은 one-to-one이 아니다.
- 하나의 point x=(x,y)T는 ax+by+c=0을 만족할 때만 line l=(a,b,c)T 상에 존재한다.
(x,y,1)(a,b,c)T=xTl=0
- Point는 x,y line은 a:b:c의 두 개의 ratio로 각각 2 DoF를 가진다.
- 0이 아닌 k에 대해서도 동일하다.
(kx,ky,1)(a,b,c)T=k(x,y,1)l=0
- 따라서, 다양한 k에 대해 (kx,ky,k)T∈P2는 point (x,y)T∈R2의 representation이다.
x=(x1,x2,x3)T∈P2≡(x3x1,x3x2)T∈R2
Intersection of Lines
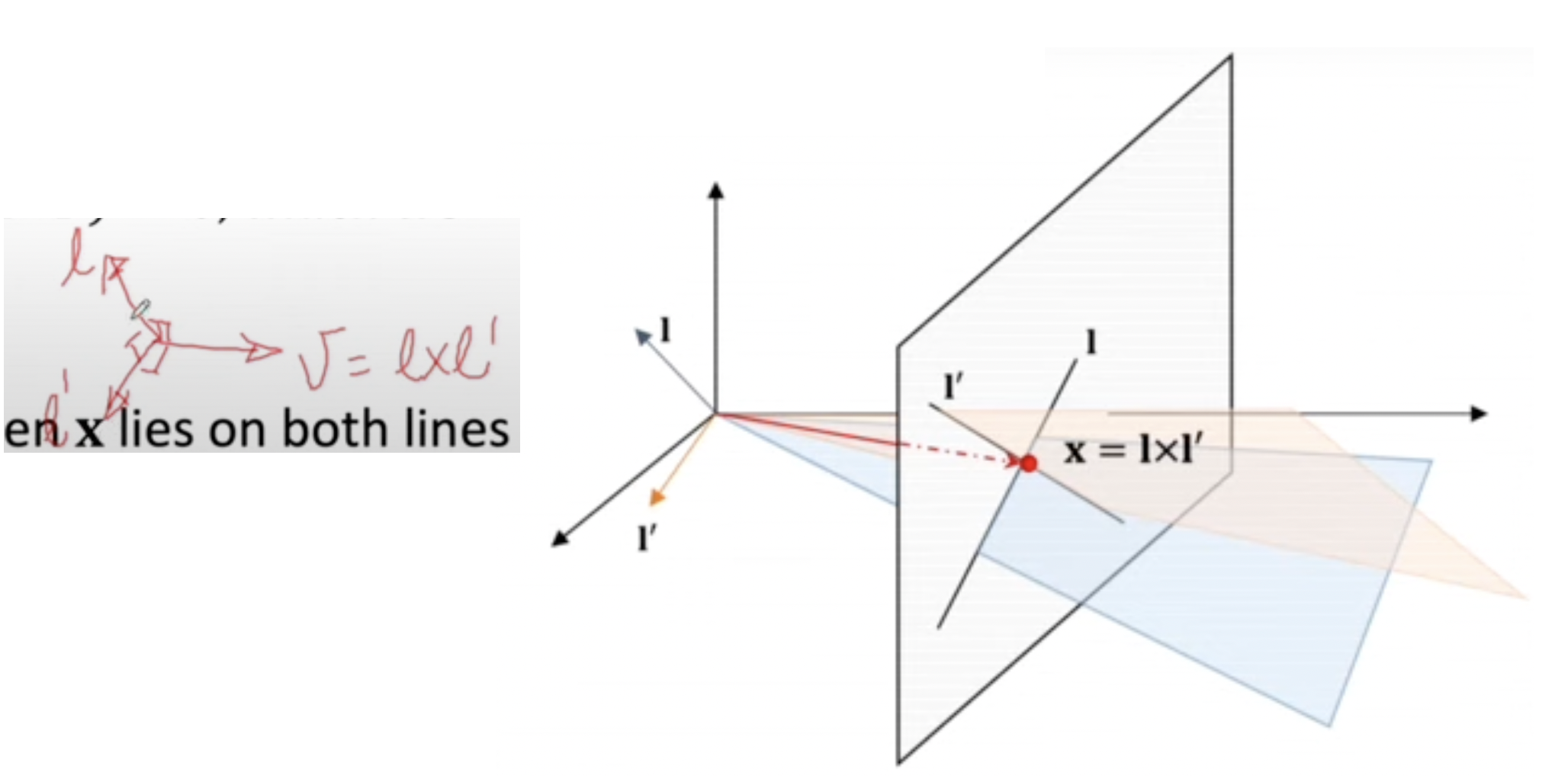
- 두 line의 intersection은 point로 외적으로 구할 수 있다.
x=l×l′
- Homogeneous 좌표로 볼 때 두 line에 대해 orthogonal하다.
- Triple scalar product identity로 증명하면 l.(l×l′)=l′.(l×l′)=0이므로 lTx=l′Tx=0
두 line에 직교하는 벡터는 l,l′과 orthogonal하기 때문에 내적했을 때 0이다.
* ∣∣a∣∣∣∣b∣∣cosθ=a⋅b를 통해 직교할 때 내적이 0임을 증명 가능하다.
Line Joining Points
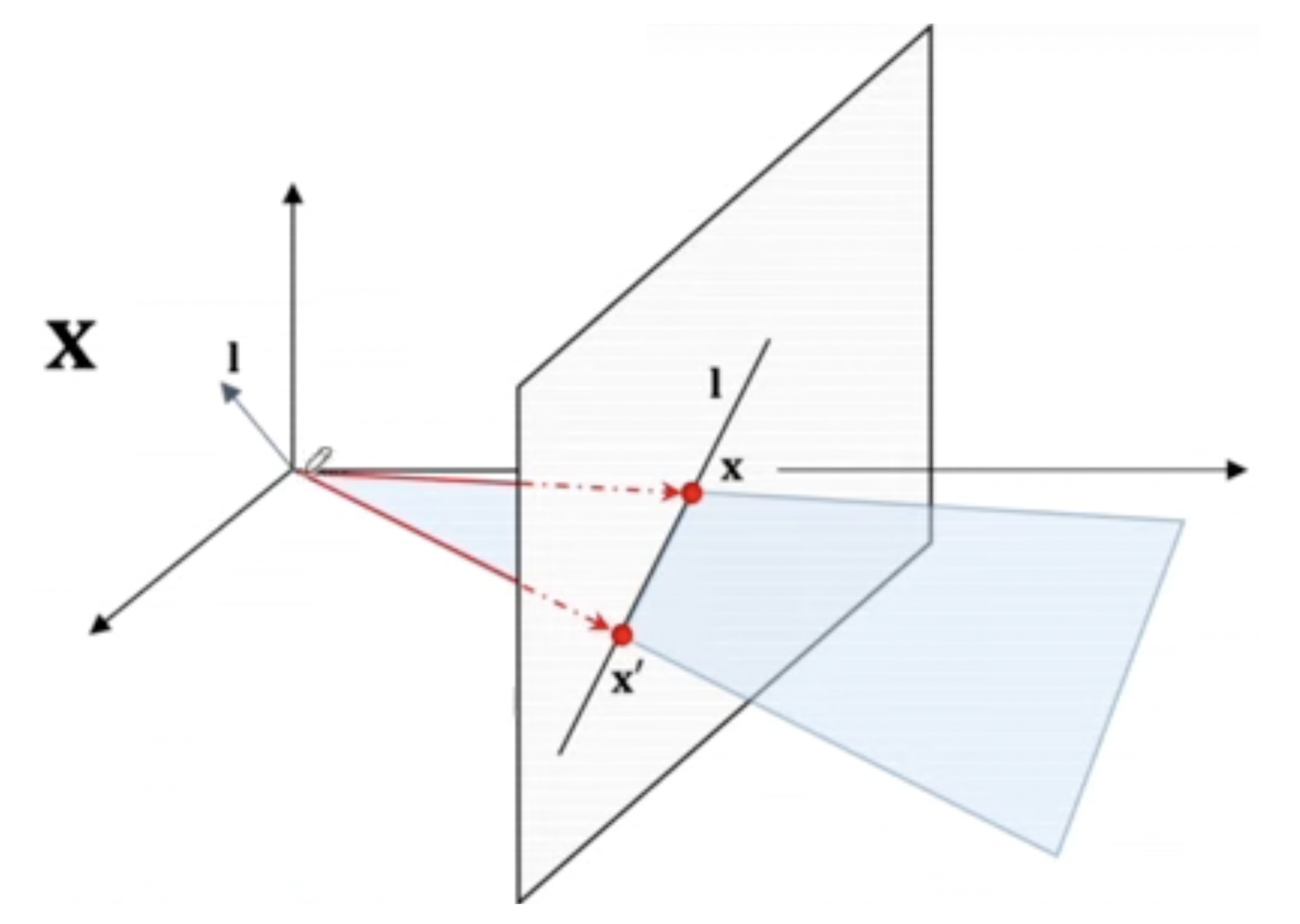
- 두 point x,x′의 외적을 통해 이들을 통과하는 line을 구할 수 있다.
l=x×x′
- 위 증명과 마찬가지로 x.(x×x′)=x′.(x×x′)=0이므로 xTl=x′T=0
- l이 그림의 plane 상에 맺히는 line이 어떻게 되나 직관적으로 이해하기 어려웠는데 point와 달리 ax+by+c=0을 만족하는 (x,y)들의 집합이기 때문에 그런듯하다.
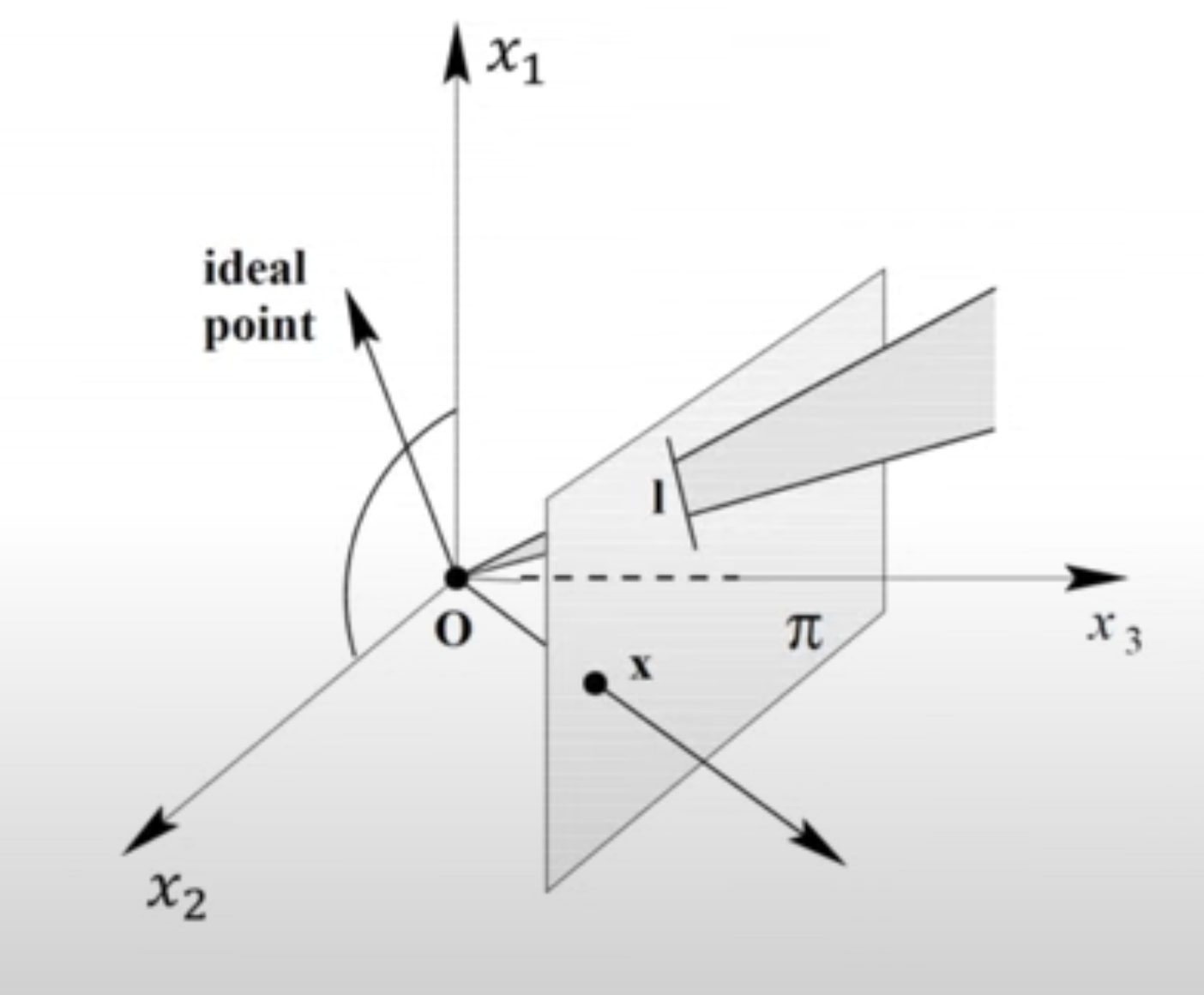
Ideal Points and the Line at Infinity
- 평행한 두 line이므로 ax+by+c=0과 ax+by+c′=0으로 표현할 수 있다.
- l=(a,b,c)T,l′=(a,b,c′)T를 외적하여 intersection을 구해보면 l×l′=(c′−c)(b,−a,0)T로 scale factor (c′−c)를 무시하게 된다.
- (b,−a,0)T은 infinite point가 되며 평행한 두 line은 infinity에서 만난다고 할 수 있다.
- Inhomogeneous notation (b,−a)T는 line에 접하며 line normal (a,b)에 orthogonal하므로 line의 방향을 나타낸다.
- Line의 방향은 다양하므로 ideal point (b,−a,0)T는 다양하고 따라서 line at infinity는 line의 방향의 집합이라 할 수 있다.
Reference
