구글링을 통해 좋은 체커보드 sdf 파일을 찾았다.
하지만 캘리브레이션할때마다 수동으로 체스보드를 배치해주기는 너무나도 귀찮지 않을까?
그런 당신을 위해 준비했다..!
Gazebo model spawn node
rosrun gazebo_ros spawn_model -file /root/catkin_ws/src/auturbo_ma-ah_gazebo/models/calibration_board/model.sdf -sdf -model chessboard -y 0.2 -x -0.3 -z 0.5
gazebo_ros 패키지에는 spawn_model이라는 노드가 존재하는데 말 그대로 urdf, sdf등으로 만들어진 모델을 gazebo map상에 배치 할 수 있는 노드이다.
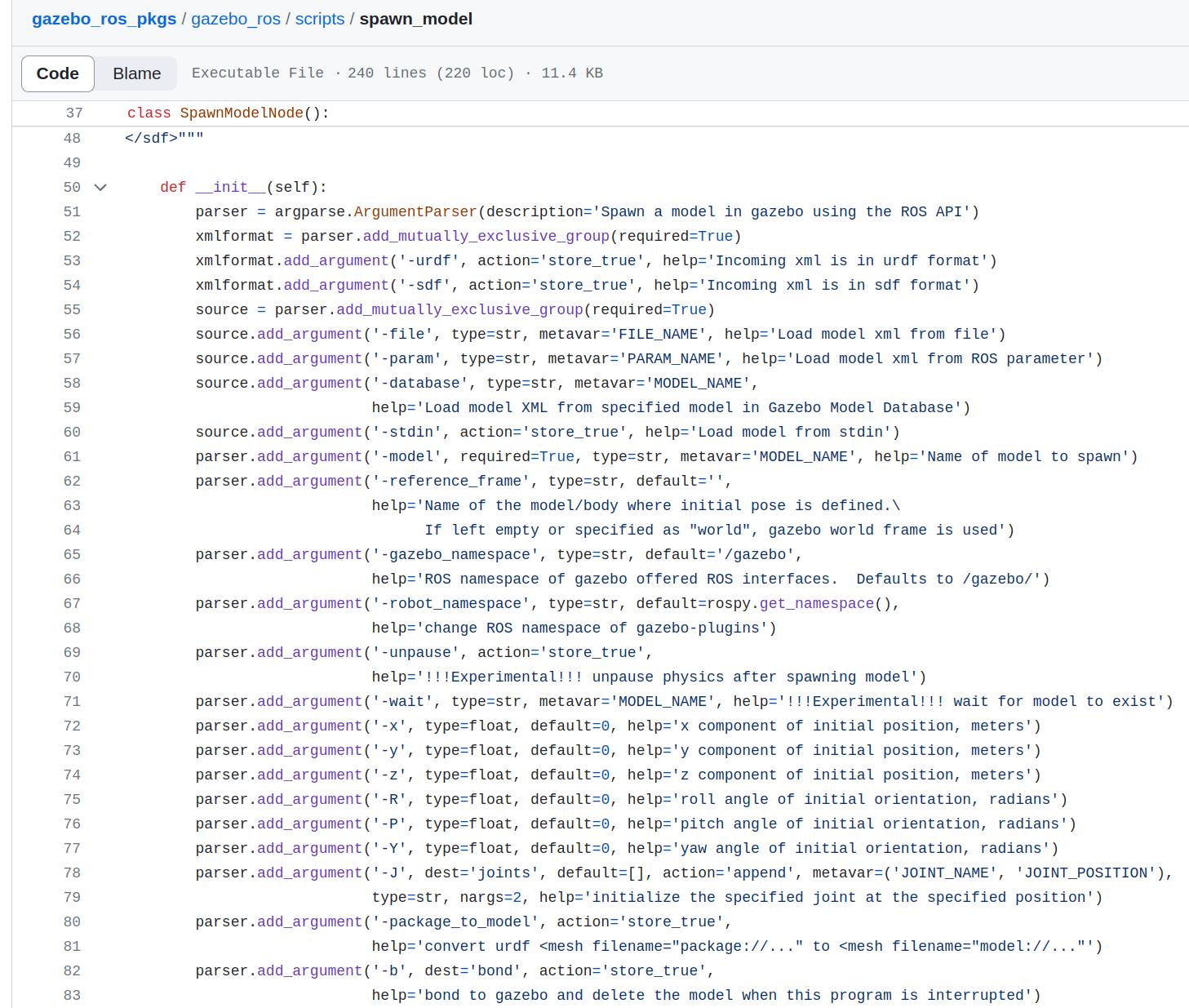
소스를 보면 다양한 옵션을 확인 할 수 있다. 우리가 사용할 주요 옵션은 다음과 같다.
- -file : sdf 파일의 경로
- -sdf : sdf 파일임을 명시
- -model : gazebo상에서 모델의 이름을 지정
이제 위 spawn_model 노드를 roslaunch에서 적절한 인자를 넣어서 실행하면 된다.
turtlebot3_calibration.launch
<launch>
<env name="GAZEBO_RESOURCE_PATH" value="$(find auturbo_ma-ah_gazebo)/models/autorace/ground_picture" />
<arg name="x_pos" default="0.8"/>
<arg name="y_pos" default="-1.747"/>
<arg name="z_pos" default="0"/>
<!-- chessboard translation -->
<arg name="chessboard_x_pos" default="0.3"/>
<arg name="chessboard_y_pos" default="0.2"/>
<arg name="chessboard_z_pos" default="0.5"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find auturbo_ma-ah_gazebo)/worlds/turtlebot3_autorace_2020.world" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find auturbo_ma-ah_gazebo)/urdf/turtlebot3_burger.urdf.xacro" />
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model autorace -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" />
<!-- chessboard add -->
<arg name="chessboard_sdf_path" default="/root/catkin_ws/src/auturbo_ma-ah_gazebo/models/calibration_board/model.sdf" />
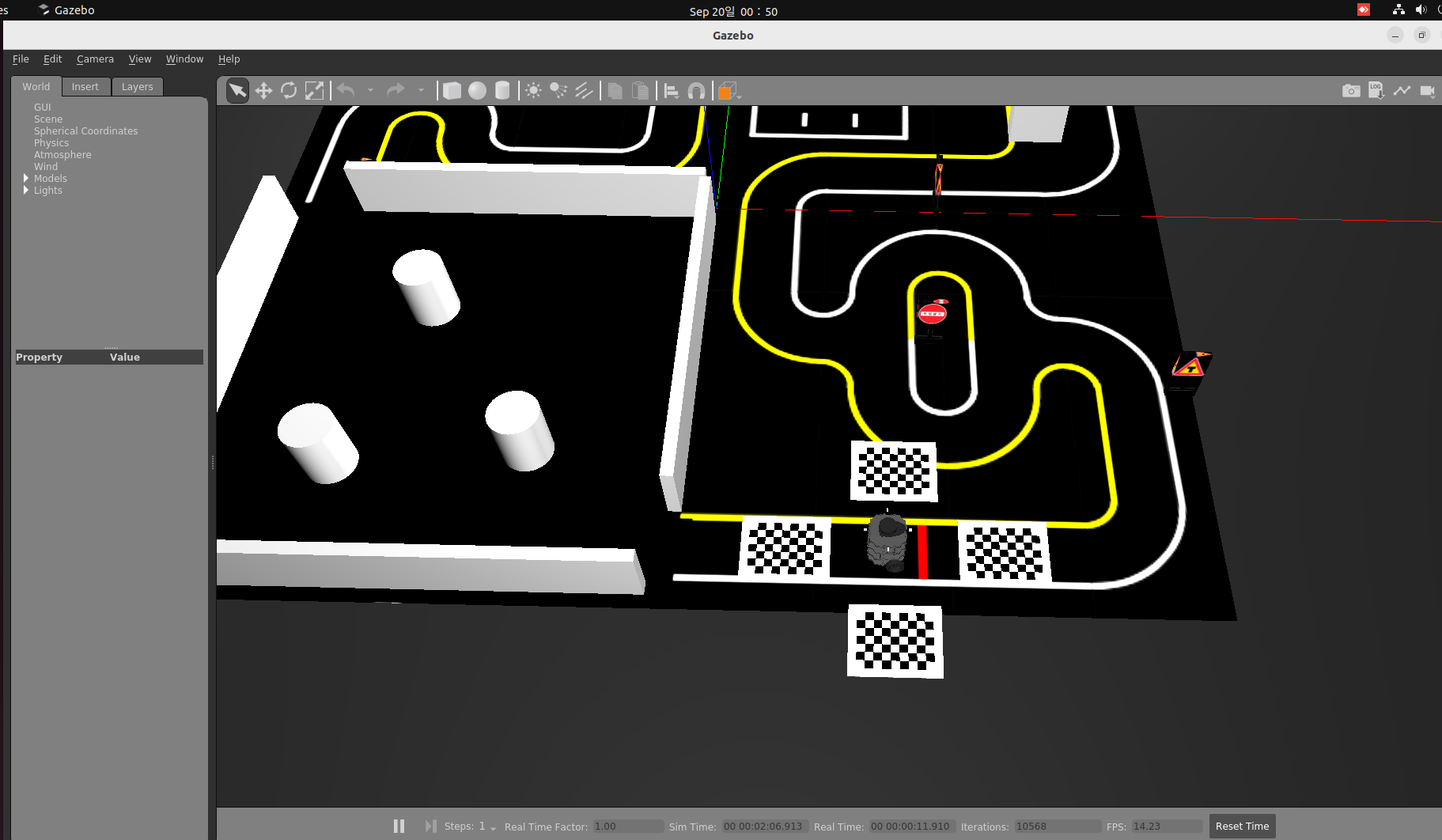
<node pkg="gazebo_ros" type="spawn_model" name="spawn_sdf" output="screen" args="-file $(arg chessboard_sdf_path) -sdf -model chessboard -x $(arg chessboard_x_pos) -y $(arg chessboard_y_pos) -z $(arg chessboard_z_pos)" />
</launch>이걸 3번더 반복하면 아래 사진처럼 동서남북으로 배치 완료!

머신러닝과 로보틱스를 좋아합니다.