[논문 리뷰] Neural Attention Fields for end-to-end Autonomous Driving(NEAT)
1. Introduction
연구 배경
-
scene에 대한 semantic, spatial, temporal structure를 추론하는 것은 자율주행에 있어서 중요한 task이다.
⇒ dynamic scene을 정확히 받아올 수 있다.
- 이를 위해서, auxiliary(보조적인) task를 활용
- 예를 들어, CILRS의 경우 simple self-supervised auxiliary training을 통해, ego-vehicle의 velocity를 예측했다.
- NEAT는 auxiliary task로 BEV semantic prediction을 택했다.
- 이를 위해서, auxiliary(보조적인) task를 활용
-
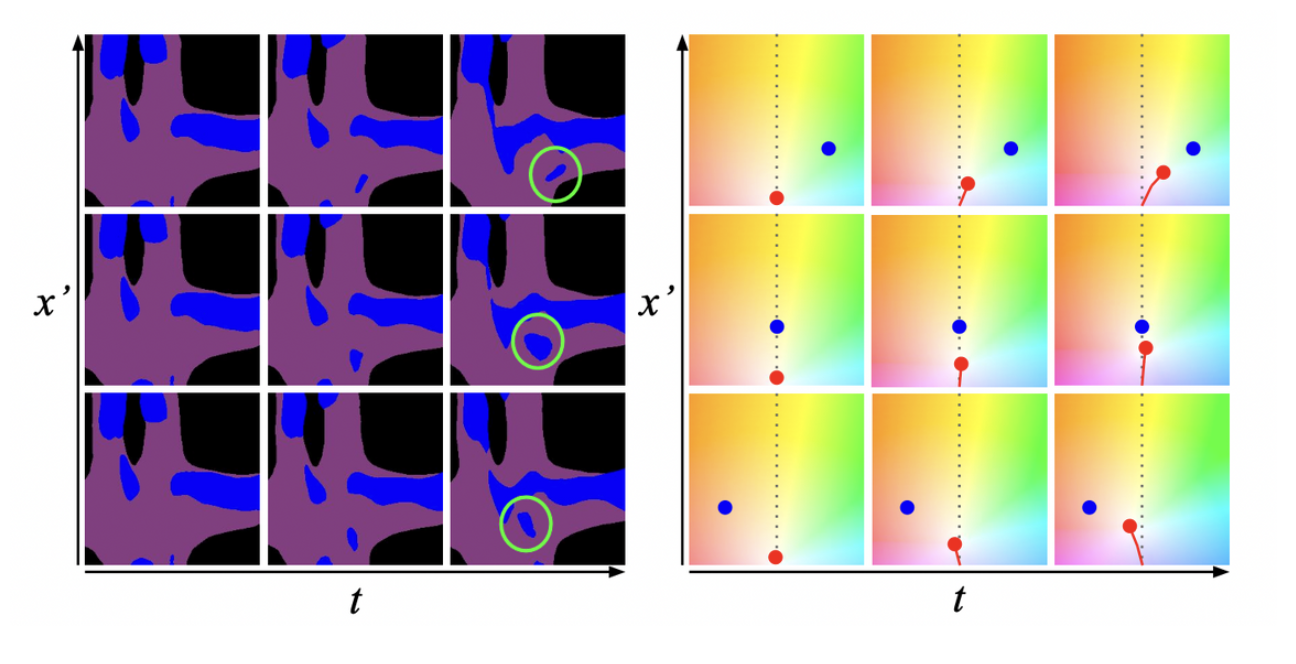
BEV semantic prediction

- 과거, 미래에 대한 BEV semantic segmentation을 출력하는 model이 필요하다.
- (x, y, t) ⇒ BEV spatiotemporal query location
- ex) (2, 5, 2) ⇒ 2 meters in front of the vehicle, 5 meters to the right, 2 seconds into the future
- 어떤 픽셀이 현재 location과 관련이 있는지 알기 어려움.
- reasoning about 3D geometry, scene motion, ego-motion, interactions between scene elements 와 같은 정보들이 필요함
-
NEAT ⇒ Neural Attention Fields for e2e driving
-
query location(x, y, t)과 interpretable attention map을 사용해서 해결
-
3. Method
Input & Output
Input
- Sensor data & Fixed length buffer of T time-steps
- S = 3 ⇒ forward, left, right RGB camera
- full 180’ view
- T = 1
- S = 3 ⇒ forward, left, right RGB camera
- velocity :
- Query point
- (x, y, t, x’, y’) ⇒ 1 ≤ t ≤ T+Z
- BEV spatiotemporal query location (x, y, t)마다 waypoint prediction, BEV semantic prediction을 수행한다.
- (x’, y’)의 경우, target location으로써, waypoint prediction에 driver의 intention을 추가해서 조정해주는 역할을 한다.
- (x, y, t, x’, y’) ⇒ 1 ≤ t ≤ T+Z
Output
- Waypoint offset ⇒
- (x_offset, y_offset)
- Semantic class ⇒
-
(K : class labels)
-
Architecture
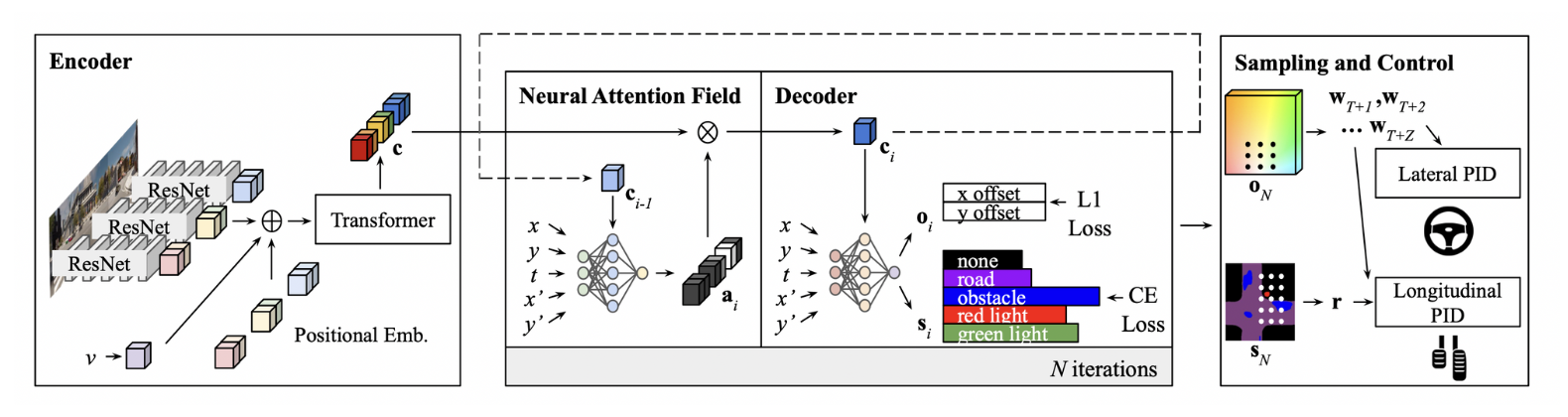
- : encoder
- : neural attention field
- : decoder
Encoder
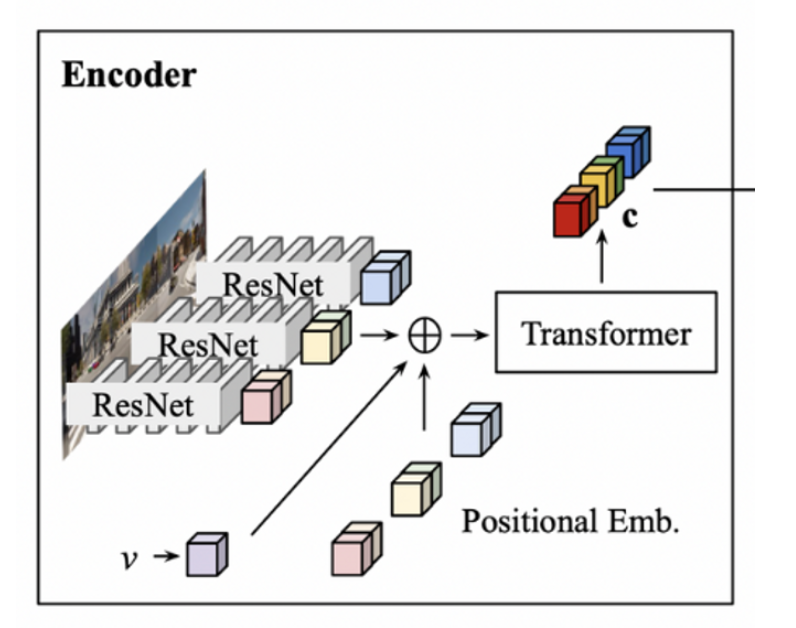
- Each Image :
- 각 센서, time-step 별 image들이 들어오면, ResNet backbone을 지나서 와 같은 형태가 된다. 여기서, P는 image당 spatial feature의 갯수이고, C는 feature dimensionality이다. 결국, ResNet backbone을 지나면, 형태의 output으로 출력된다.
- 이 후에, velocity feature , learned positional embedding을 더해서 Transformer에 Input으로 들어간다. ⇒ transformer의 self-attention mechanism을 통해 feature들을 global하게 통합해, 맥락적인 정보를 더 잘 받아오기 위함.
- ⇒ obtained by linearly projectione
- learned positional embedding :
- transformer의 output 또한 input과 동일하게 다음과 같이 출력된다.
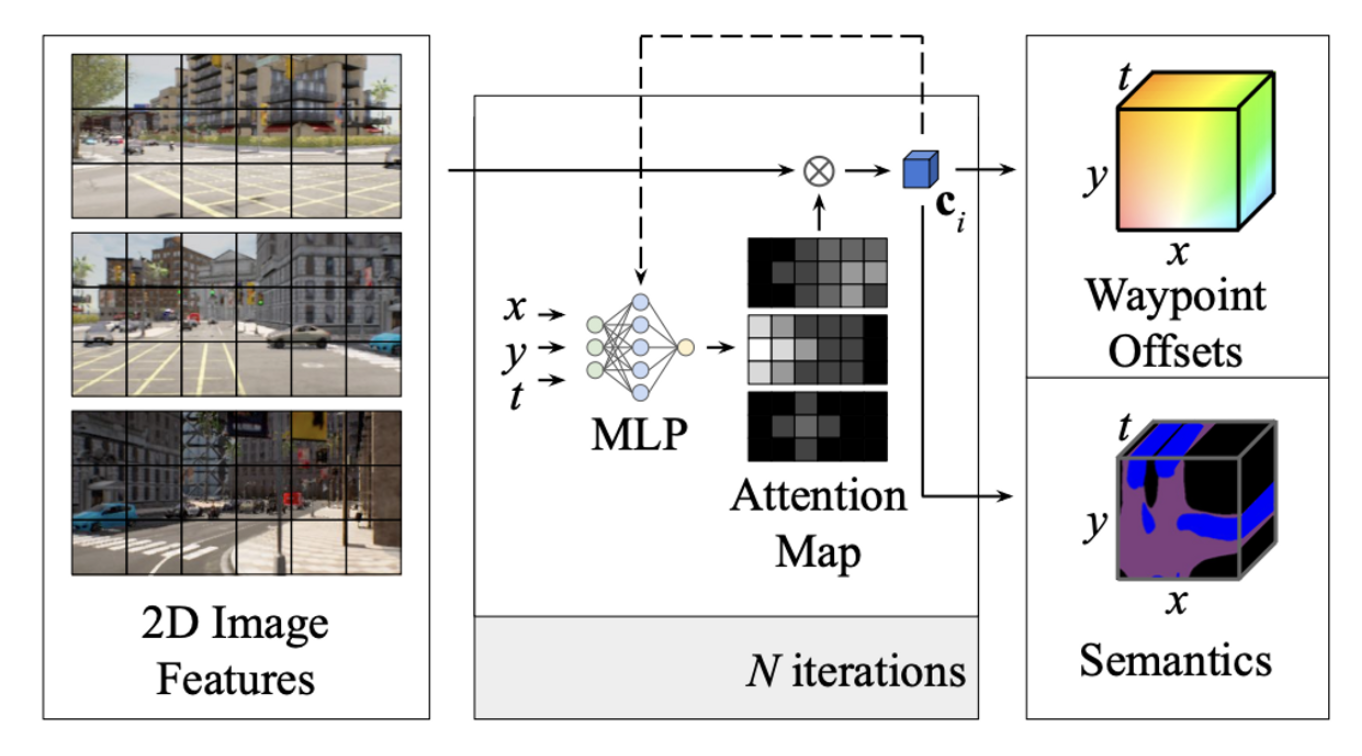
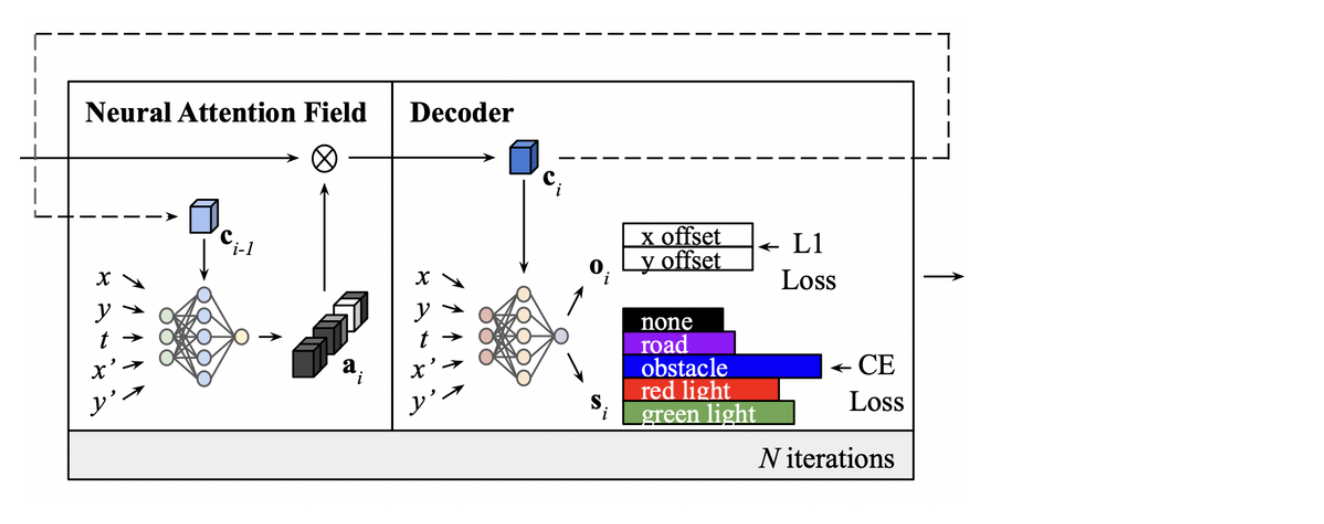
Neural Attention Field
-
-
query location은 에 추가로 target location 가 추가되어, 의 형태를 가진다.
-
- : set to the mean of
-
MLP를 통해 attention map을 뽑아내는 과정은 다음과 같은 형태를 지닌다.

-
5 fully-connected ResNet Block으로 구성되어 있으며, 중간에 을 통해, CBN(conditional batch normalization)을 수행하는 구조로 이루어져 있다.
-
CBN?

- 에 2-layer ReLU, MLP를 통해 128-dimensional vector 를 도출한다.
-
-
Decoder
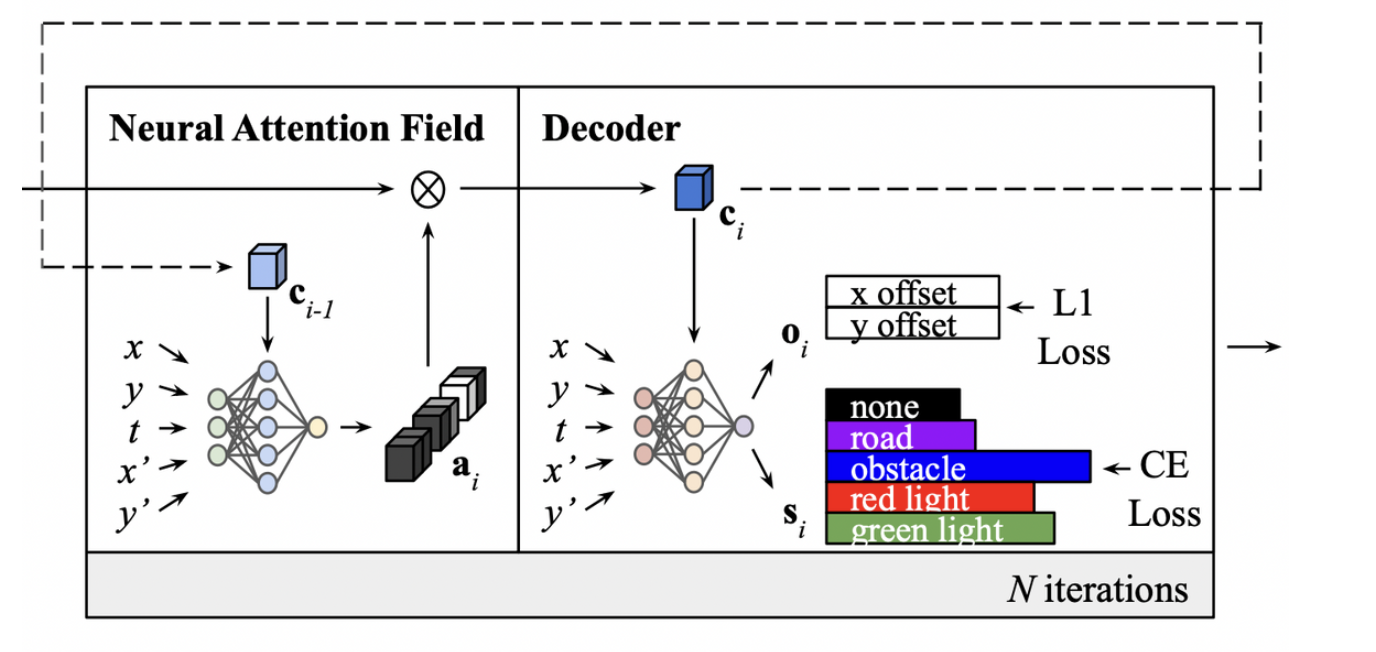
- 와 유사한 형태의 MLP 구조로 output layer에서 semantic class와 waypoint offset을 출력한다는 점이 다르다.
- 위 과정을 매 iteration마다 수행해 총 N번 수행한다.
- But, intermediate iteration은 test time에 이용되지 않음
Training
Sampling
- semantic class label의 경우, 보통 불균형하기 때문에, training 시기에 class-balancing sampling이 필요하다.
- semantic class들 중에 가장 적은 point 갯수를 가지는 class 우선으로 point를 랜덤하게 추출된다.
Loss

- waypoint offset loss의 경우, L1 Loss를, semantic class loss의 경우 Cross-Entropy Loss를 사용한다.
- N : iterations
- M : samples
Controller
- Red light indicator, waypoint를 구해서, 이를 PID controller를 이용해 steer, throttle, brake value로 변환한다.
Red Light Indicator ()

- 현재 위치에서 정면 50m, 우측 25m 범위에 sparse grid sample point를 일정하게 찍어, 그 point의semantic prediction이 red light class인 것이 있다면, 을 1로 부여하고, 아니면 0으로 부여한다.
- (U, V) grid ⇒ U = 16, V = 32
Waypoint

- 정면 A meter square 범위를 (G x G) grid point로 나누어, waypoint offset 을 각 grid point, 각 time-step(t=T+1, … , T+Z)에 더한다.
- 그 후에 모든 waypoint prediction의 average를 계산해 최종 waypoint prediction 를 구한다.
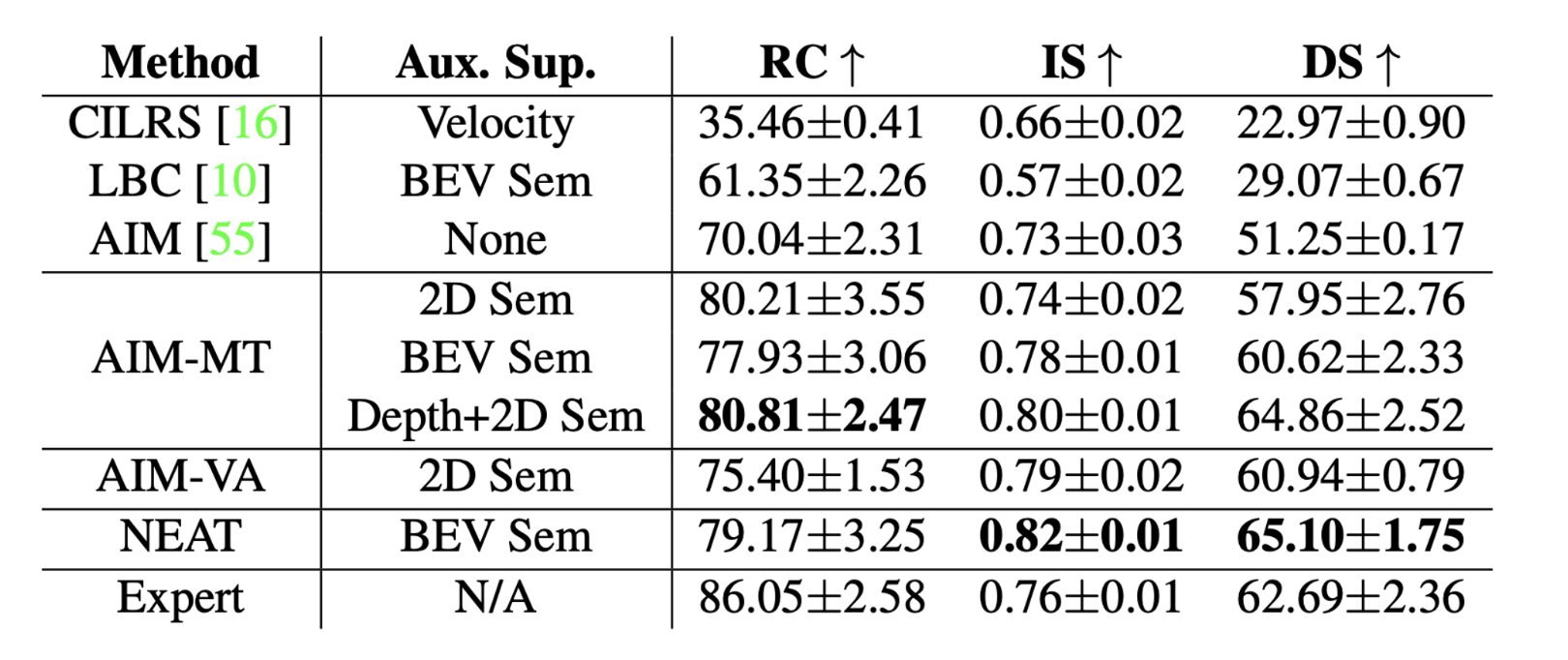
Experiments
Routes
- CARLA ver.0.9.10
- 42 routes from 6 different towns (training ⇒ 8 towns)
- 7 weathers
- Clear, Cloudy, Wet, MidRain, WetCloudy, HardRain, SoftRain
- 6 daylight conditions
- Night, Twilight, Dawn, Morning, Noon, Sunset
Metrics
- RC : Route Completion
- IS : Infraction Score
- DS : Driving Score
Driving Performance