일반적으로 하나의 사진 만으로는 사진 속 객체의 위치 또는 카메라의 위치를 알아내기 위한 정보가 부족하다. 하지만 다른 시점으로 이동하여 촬영한 사진들이나 여러 대의 카메라에서 촬영된 사진들이 주어진다면, 객체의 위치 또는 카메라의 위치를 추론할 수 있다. 이를 위하여 각 영상 간의 관계 등에 대한 제한 조건(constraint) 등을 활용한다.
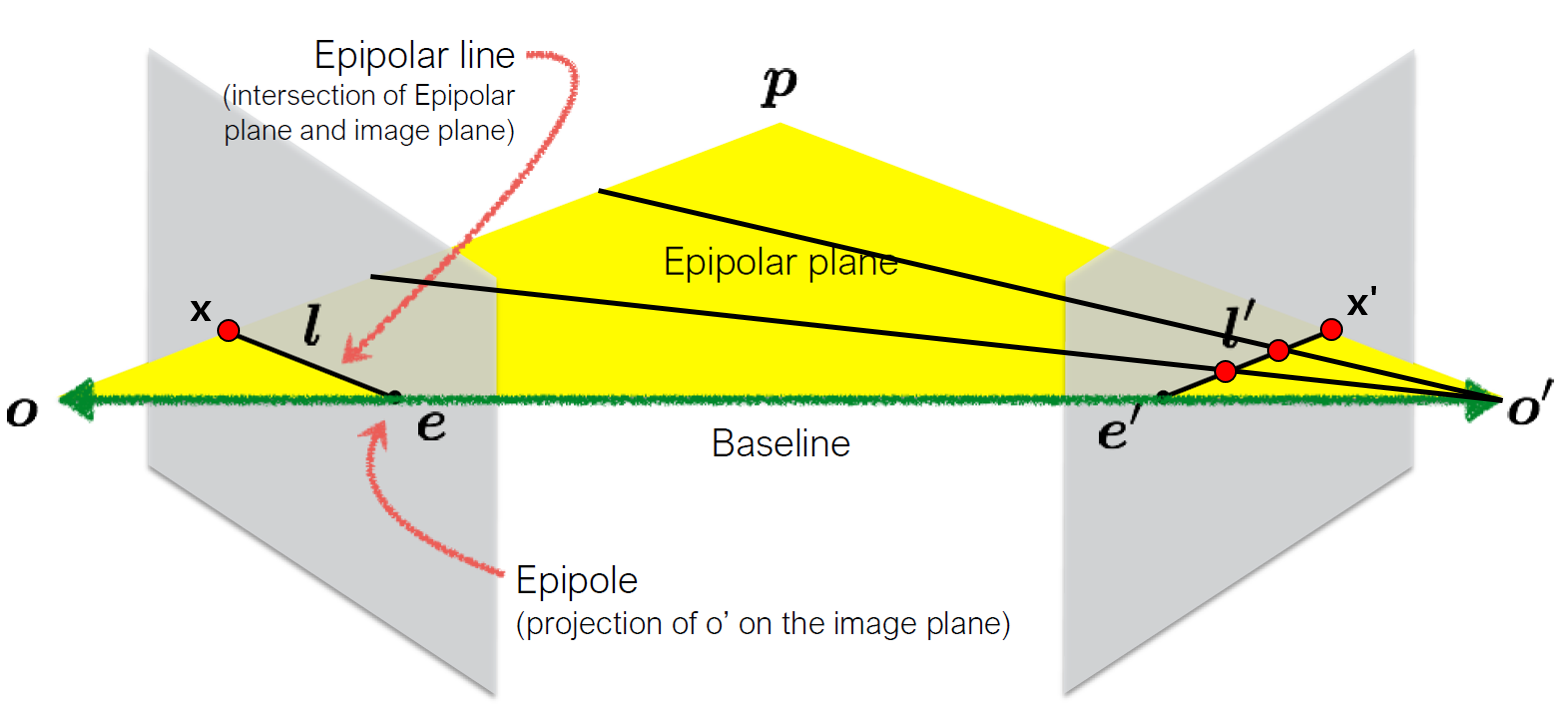
Figure 1. Epipolar geometry
위의 그림과 같은 epipolar에 대한 기본적인 설정이며, 여기서 O,O′은 두 카메라의 원점, P는 객체, x,x′는 객체가 두 영상에서 투영된 위치를 의미한다. 그리고 두 원점 O,O′을 연결한 선을 baseline, baseline이 각 image plane과 만나는 점(어떤 카메라 영상에 투영된 반대편 카메라의 위치)을 epipole, O,O′,P가 이루는 평면을 epipolar plane, epipolar plane과 각 image plane이 만나 생성되는 직선을 epipolar line(l,l′)이라고 한다. 이때, OP 상의 모든 점은 x에 투영되므로, 왼쪽의 첫번째 영상(O)에서 x만 가지고 P의 정확한 위치를 추론할 수 없다. 하지만 두번째 영상에 투영된 x′를 이용하면, OP,O′P의 교점을 통해 P의 위치를 알 수 있으며, OP 상의 모든 점은 두번째 카메라(O′)의 epipolar line, l′상에 투영된다.
1. Epipolar Constraint
위의 그림에서 알 수 있듯이, O,O′,P과 더불어 모든 epipole, epipolar line은 하나의 평면상에 존재하며, 이러한 성질이 epipolar contraint를 구성한다. 먼저, 객체 P가 투영된 점 x는 epipolar line l위에 있으므로 이를 이전 글처럼 homogenous coordinate로 표현하면 다음과 같다.
xTl=0
다만, 위의 표기에서 x는 카메라 그리고 두 카메라 원점을 연결한 선 OO′를 나타내는 벡터를 b라고 하고, 해당 직선과, 투영된 점 x,x′가 한 평면위에 있다는 점을 사용하면 다음과 같은 contraint도 구성이 가능하다.
x⋅(b×x)=xTb^x=0
두 벡터의 외적은 두 벡터가 그리는 평면에 수직이므로 위의 contraint가 성립하며, 벡터의 외적은 위와 같이 skew-symmetric 행렬을 통해 행렬-벡터 곱으로 표현이 가능하다
2. Essential & Fundamental Matrix
Essential & fundamental matrix는 Fig.1과 같은 환경에서 두 영상 간의 관계를 나타내는 행렬이며, 위의 epipolar contraint에서 유도될 수 있다.
먼저, 두 카메라 간 회전행렬을 R, translation(baseline)을 b라고 하면, x′=R(x−b)가 성립하고, epipolar constraint에서 x⋅(b×x)=0→x⋅(b×(x−b))=xTb^(x−b)=0임을 알 수 있다. 두 식을 결합하면 다음과 같이 정리할 수 있다.
xTb^(x−b)=xTb^(R−1x′)=xTb^RTx′=0
여기서 b^RT를 essential matrixE라고 하며, 위의 또다른 contraint xTl=0를 이용하면 x′Tl′=x′T(b^RT)x=x′TEx=0이므로, l′=Ex이라고 할 수 있다(반대로 l=Ex′이기도 함). 즉, essential matrix를 통해 frame 1에 투영된 점 x를 통해 반대편 frame 2에 생성되는 epipolar line을 찾을 수 있다는 것을 의미한다. 추가적으로 epipole e은 epipolar line 위에 존재하므로, eTE=Ee′=0이 성립한다.
여기서 주목해야하는 점은 사용된 행렬과 벡터들이 표현된 좌표계이다. 우선 (x,l),(x′,l′)은 각각 O,O′의 카메라 좌표로 표현되었으며, 3D이다(homogeneous coordinate로 표현하면 원소가 4개, image 좌표계가 아님). R,b의 경우 frame 1를 기준으로 나타낸 frame 2의 상대적인 회전, 이동 행렬이다. 즉, world 좌표의 중심이 O에 있다고 보고, E는 두 frame의 상대적인 변환 행렬로 구성된 것이라고 할 수 있다.
하지만, 실제로 우리가 데이터를 수집할 때 얻게 되는 정보는 2차원의 영상이며 이는 image 좌표계에서 표현된다. 만약 카메라의 intrinsic parameter를 알고 있다면 image 좌표계에서 camera 좌표를 알아 낼 수 있지만, 그렇지 않다면 위의 식을 다음과 같이 정리하여 image 좌표에 대한 식으로 쓸 수 있다.
여기서 F를 fundamental matrix라고 하며, essential matrix와 비슷하게 l′=Fx, eTF=Fe′=0이 성립한다(단, image 좌표계임에 주의). 또한 F는 skew-symmetric의 성질을 활용하여 다음과 같이 다양한 형태로 쓸 수 도 있다.
F=K−Tb^RTK′−1=KbKRTK′−1=K−TRRbK′−1=K−TRK′TK′Rb
두 epipole e,e′은 서로 반대편의 카메라 중심이 투영된 지점이다. e의 경우 반대편 카메라 중심 O′가 투영된 점이므로 frame 1의 시점에서 O′의 좌표 b를 투영하면 e=Kb가 되며 (O를 world 좌표의 중심처럼 생각하므로 회전이 없음), e′의 경우 원점에 있는 O를 P′=K′(R∣−Rb)를 통해 투영하므로 e′=K′Rb가 된다. 따라서 위의 fundamental matrix 표현식 중 일부를 다음과 같이 쓸 수 있다.
KbKRTK′−1=eKRTK′−1
K−TRK′TK′Rb=K−TRK′Te′
Homogeneous coordinate에서 두 점 e,ix를 지나는 직선은 l=e×ix=e^ix로 쓸 수 있으며, 이 직선은 epipolar line이다. 따라서 fundamental matrix을 사용하면 epipolar line은 l=e^ix=Fix′인데, F=eKRTK′−1이므로, e^ix=eKRTK′−1ix′가 되어 KRTK′−1가 ix′를 ix로 매핑하는 homography라고 할 수 있다.
또한 K,K′,R은 rull rank이고, e는 rank가 2이므로, F=eKRTK′−1에서 fundamental matrix F의 rank는 2가 됨을 알 수 있다.
이를 보이기 위해 A가 K×L행렬이고, B가 L×L인 full rank 정방행렬이라면, rank(AB)=rank(A)이라는 성질을 사용하면 되는데 이에 대한 증명은 이전 글에 있다.
3. 8 Points Algorithm
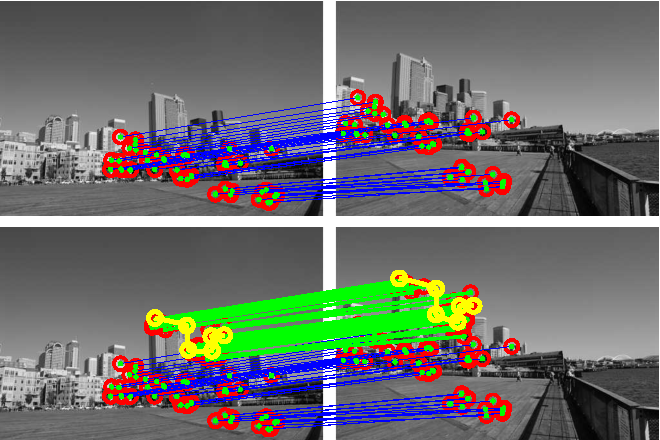
만약 두 카메라의 내/외부 파라미터를 모두 알고 있다면 위의 식을 통해 essential & fundamental matrix를 구할 수 있다. 하지만 많은 경우 모든 파라미터를 알고 있기 어렵기때문에 DLT와 비슷한 방식으로 몇 개의 corresponding points를 통해 essential & fundamental matrix를 계산한다. 이때, corresponding points란 다음 그림과 같이 두 frame에서 하나의 scene을 촬영했을 때 나타나는 공통된 지점에 대한 point들의 쌍이다.
Figure 2. Correspondence points
만약, fundamental matrix를 구한다고 하였을 때, 우리는 corresponding points를 통해 ix,ix′을 알 수 있으며, 이를 통해 다음과 같은 식을 세울 수 있다.
9개의 F들을 알아내기 위하여 최소 8개의 점이 필요하며, 더 많은 점을 사용할 경우 RANSAC 방법 등의 적용도 고려할 수 있다. 위 식의 풀이는 DLT와 마찬가지로 SVD를 사용하며, 가장 작은 특이점에 대응되는 오른쪽 특이 벡터를 해로 사용한다.
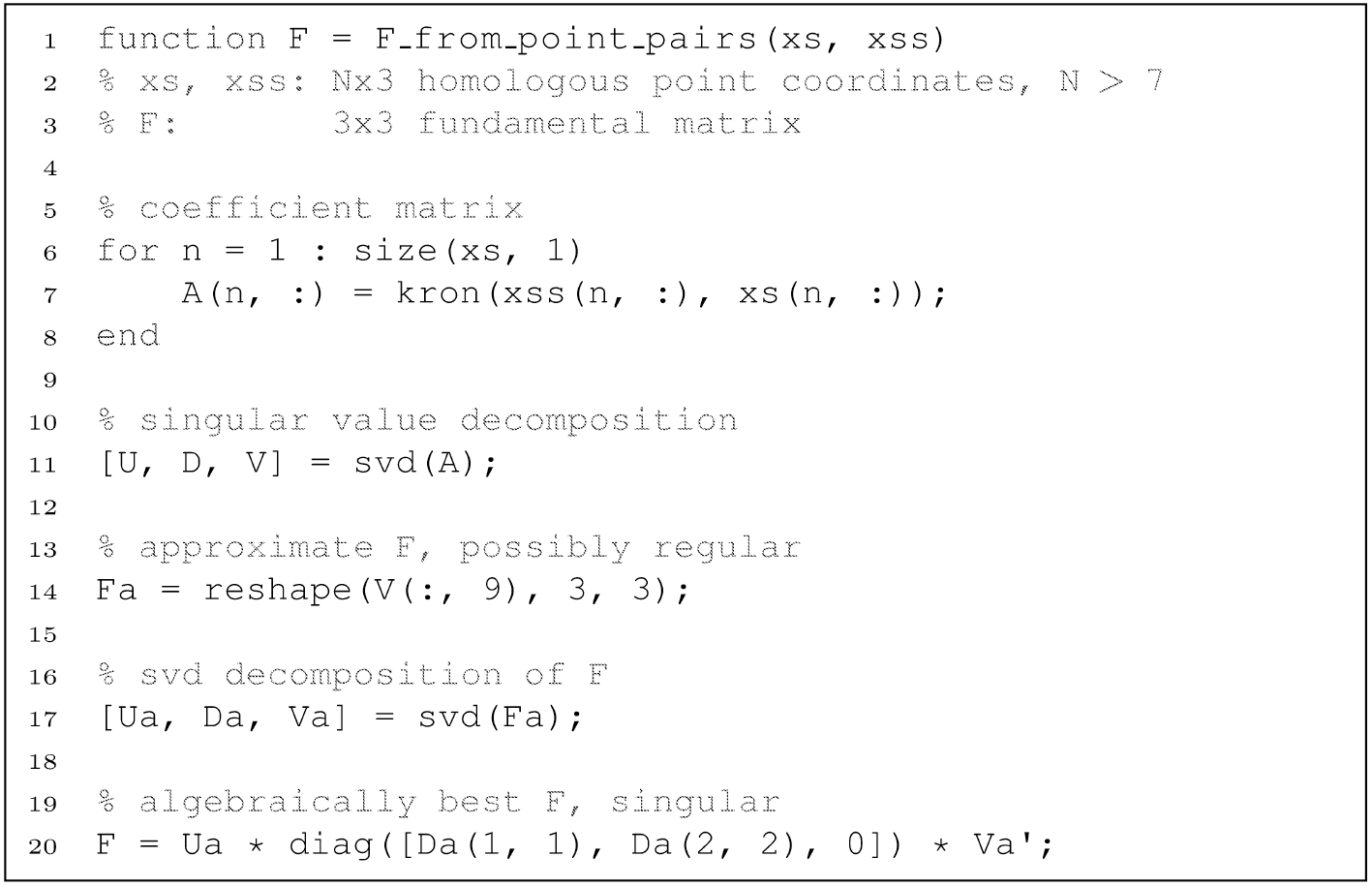
다만 위에서 보았듯이 fundamental matrix F는 rank가 2라는 조건이 있으므로 이러한 조건을 만족하도록 해줘야하며, 이 글에서 보았듯이 가장 큰 2개의 특이값 만을 선택하여 rank-2 근사를 할 수 있다. 따라서 종합적으로 다음과 같은 과정을 통해 8 point algorithm이 수행된다.
Figure 3. 8 point algorithm의 과정
4. Recover Relative Orientation
Essential matrix의 경우에도 위와 비슷한 방법으로 구할 수 있으며, 이때 사용되는 xn들은 image 좌표가 아니라 투영된 점을 카메라 좌표(3D)로 표현한 것이다.
Essential matrix 또한 위와 마찬가지로 식을 구성하여 SVD를 적용하면 1차적으로 해를 찾을 수 있다. Fundamental matrix의 경우 여기에 rank=2라는 constraint를 적용하였지만, essential matrix의 경우 다른 constraint를 적용해야한다.
W=⎝⎜⎛010−100000⎠⎟⎞Z=⎝⎜⎛0−10100000⎠⎟⎞
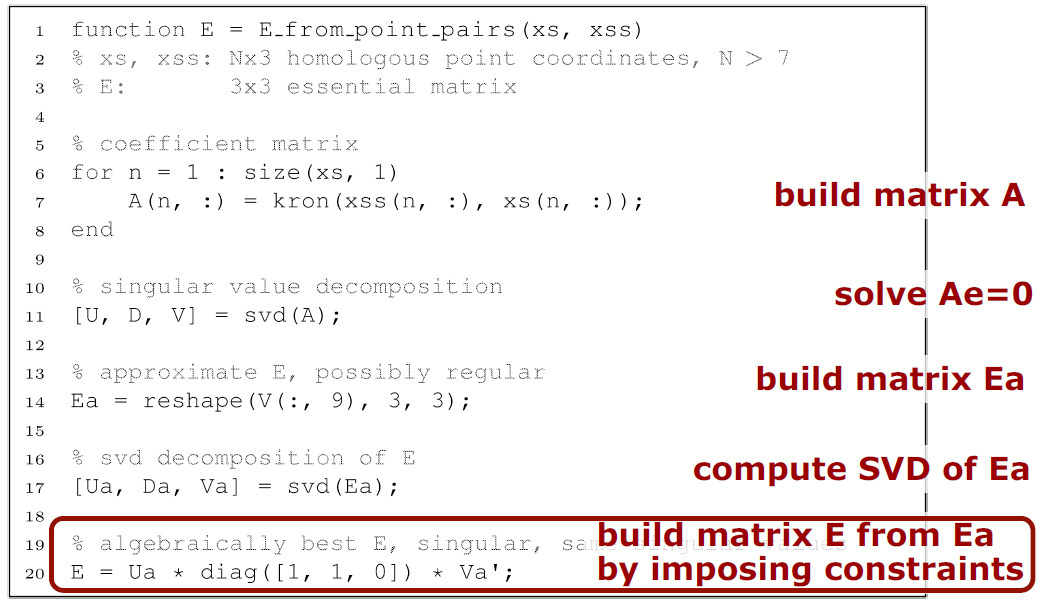
Essential matrix의 constraint는 SVD를 했을 때 나타나는 3개의 특이값(3×3 행렬이므로)중 앞의 두 개는 동일하고, 나머지 하나는 0이라는 것이다. 이러한 성질은 essential matrix E=b^RT에 있는 skew-symmetry 행렬에 의한 것으로, 이전 글에 있듯이 skew-symmetry(3×3 행렬)는 b^=kUZUT로 분해된다(이때, U는 orthogonal). 이때, Z=diag(1,1,0)W이고, 이를 종합하면 essential matrix는 E=b^RT=Udiag(1,1,0)(WUTRT)로 쓸 수 있다. 여기서 U,WUTRT가 orthogonal하므로 이 정리식을 essential matrix의 SVD 분해식으로 볼 수 있고, essential matrix의 특이값이 1,1,0임을 알 수 있다. 이러한 constraint는 다음과 같이 적용하여 최종적인 essential matrix를 구할 수 있다.
Figure 4. Essential matrix 구하는 과정
여기서 주목할 점은 essential matrix에서 카메라의 변환과 관련된 R,b^를 복원할 수 있다는 점이다.
따라서 R,b^에 대해서도 R=UWVT,UWTVT와 b^=UZUT,UZTUT의 해가 존재하며, R,b^의 조합으로 생각하면 총 4가지의 조합이 가능하다. 여기에 det(R)=1이라든지, 여러 점에 대해서 triangulation을 적용했을때 나온 포인트의 위치가 가능한 위치인지(잘못된 값이라면 계산된 포인트의 위치가 카메라 뒤로 나올 수 도 있음)등 여러가지 실험을 수행하여 4개 중 하나를 선택한다.
Figure 5. 가능한 네 가지 조합과, valid한 해
추가적으로 8 points algorithm 계산 시, 수치적인 안정성을 위해 x들을 -1과 1사이의 값으로 normalization 하는 경우가 있다. 예를 들어 fundamental matrix의 경우 T:Tix=ixˉ라는 transformation T를 사용하여 normalization한다고 가정하면 다음이 정리할 수 있다(Essential matrix의 경우도 비슷한 전개를 사용할 수 있음).