앞선 내용에서 각 카메라의 orientation을 찾거나 촬영된 포인트의 3D 좌표를 복원하는 방법들을 알아보았다. 하지만 해당 과정에서 우리는 corresponding point(서로 다른 영상에서 중복되는 객체에 대한 점, 이전 글의 Figure 2. 참고)가 주어졌다고 가정하였는데, 이번 글에서는 이러한 corresponding point를 찾는 방법을 알아보고 기초 컴퓨터 비전 학습을 마무리한다.
1. Feature Extractor and Descriptor
Corresponding point를 찾기 위한 첫번째 방법으로 feature extractor(특징 추출자)와 descriptor(특징 기술자)의 조합을 들 수 있다. 먼저, feature extractor는 영상 내에서 어떠한 특징점을 찾아내는 것으로 영상 내에 나타나는 edge, corner 등이 대표적인 특징점이 될 수 있다. Feature descriptor는 이렇게 찾아낸 feature들마다 서로 구별되는 값을 할당하며, 이를 통해 두 영상에서 검출된 수많은 feature points 중 같은 point들을 짝지을 수 있다.
1.1. Extractor
1.1.1. Harris Corner Detector
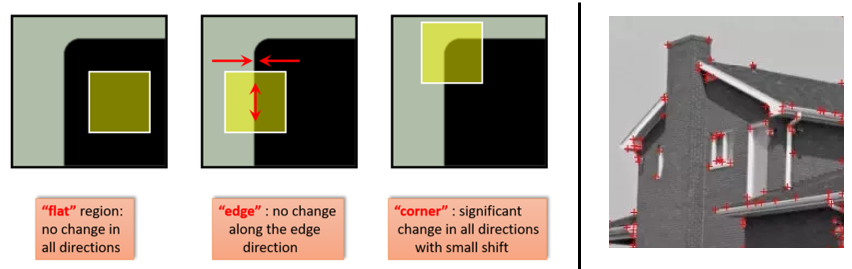
Harris corner detector는 입력 영상 내에서 모서리(corner)를 검출하는 방법이다. 기본적인 아이디어는 아래의 그림과 같이 모서리에서는 모든 방향에서의 픽셀값 변화가 크다는 점에 착안한다.
이때 사용된 J들은 Jacobian이며, 마지막 step에서 미소 변화량 (δx,δy)는 summation과 관계가 없기 때문에 밖으로 빼어 정리할 수 있다. 그리고 M의 고윳값이 λ1≥λ2라면, 위와 같이 정리된 영상 변화량을 최대화하는 방향은 λ1에 해당하는 고유벡터, 최소화하는 방향은 λ2에 해당하는 고유벡터이다(변화량은 고유값).
A=AT=QΛQT이고, 행렬의 고유값이 λ1≥⋯≥λn일 때, λnxTx≤xTAx≤λ1xTx가 성립
Feature extractor와 descriptor의 조합은 각 입력 영상에 대해서 독립적으로 작동하여 특징점을 추출하고 그에 해당하는 기술자를 서로 비교하여 corresponding points를 찾는다면, stereo matching에서는 두 장의 image가 동시에 주어지며 하나의 image에서 얻은 작은 크기의 patch를 다른쪽 image에서 일일이 비교하며 가장 유사한 위치를 찾는 방법이다.
2.1 Matching
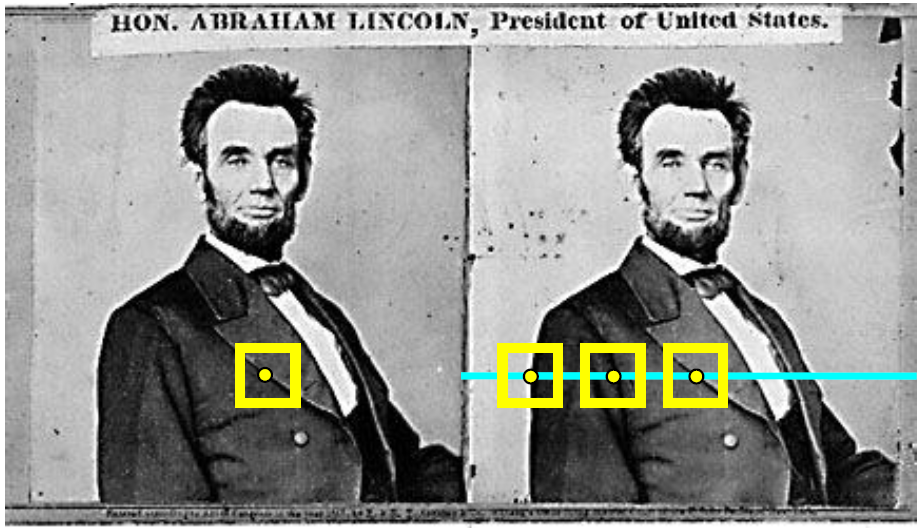
Figure 2. Stereo matching
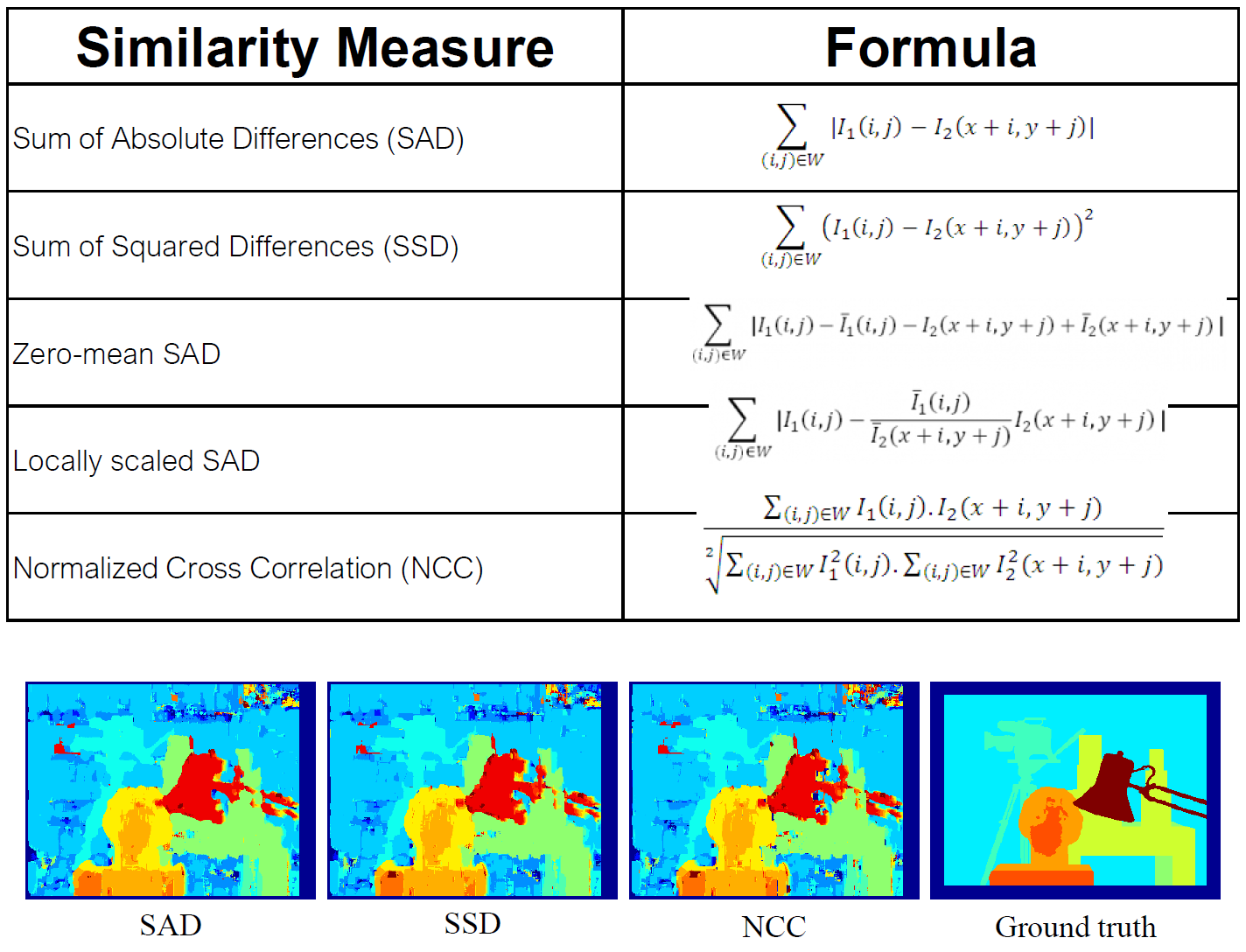
Figure 2.는 stereo matching 방법을 보여주며, 왼쪽에서 뽑아낸 patch(노란색 박스)와 가장 유사한 부분을 오른쪽 그림에서 찾기 위해 여러 위치에 대해서 patch를 뽑아내서 서로 비교한다. 이를 위하여 두 patch를 비교하여 유사도를 계산할 수 있는 식이 필요한데 다음과 같이 여러 종류의 식을 사용할 수 있다.
Figure 3. Stereo matching에서 사용 가능한 여러 measure
다만, 유사한 patch를 찾기 위하여 image 내의 모든 위치에 대해서 탐색을 하면 연산 시간이 너무 오래걸린다. 이러한 연산 시간을 줄이기 위하여 보통 epipolar line 상의 위치에 대해서만 탐색을 하는데, 이전 글에서 알 수 있듯이, corresponding points들은 하나의 epipolar plane 상에 위치하기 때문에 이러한 탐색 방법이 성립하게된다.
2.2 Rectification
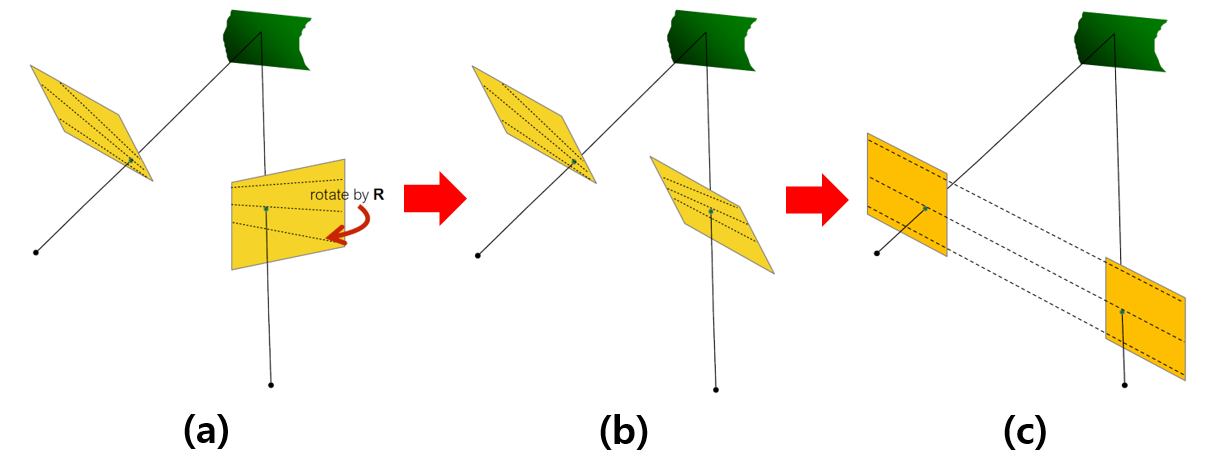
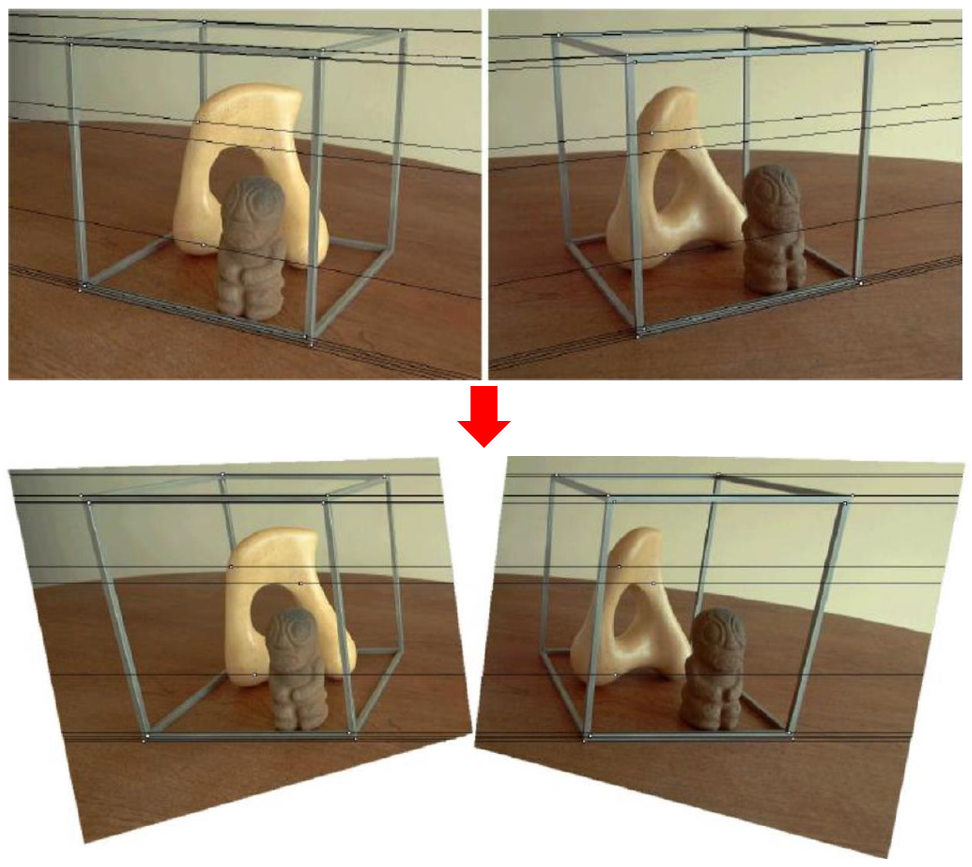
두 영상이 입력되었을 때, 일반적으로는 아래 그림의 (a)와 같이 epipolar line이 정렬되지 않은 상태이다. 만약 matching을 수행하고자 하는 부분이 많다면 그 때마다 epipolar line을 구하는 것은 연산량을 많이 낭비하게 된다. Rectification은 이러한 문제를 해결하기 위한 전처리 과정으로 아래 그림과 같이 epipolar line이 평행하게 정렬되도록 두 이미지를 변환한다.
Figure 4. Rectification 과정
Rectification을 수행하기 위하여, 먼저 essential matrix에서 두 영상 사이의 rotation matrix R을 구하며, 이 과정은 이전 글에 나와있다. 해당 rotation matrix을 두번째 영상에 가하면 두 영상은 Fig 4.의 (b)처럼 같은 방향을 바라보게 된다.
그 다음으로 epipolar line들을 평행하게 변환하기 위하여 epipole을 무한대 점으로 보낸다. 이를 위한 회전행렬 Rrect는 다음과 같다.
이때, Rrecte1=(1,0,0)T이 되어 무한대로 가는 것을 확인할 수 있으며, epipole e1는 반대편 카메라 중심이 투영된 점이므로 essential matrix에서 복원한 translate b를 통해 구할 수 있다. 따라서 전체적인 알고리즘은 다음과 같다.
Figure 5. Image rectification 알고리즘
Figure 6. Image rectification 결과
3. Optical Flow & Tracking
이 방법은 영상에서 픽셀의 변화를 기반으로 움직임을 예측 및 추적하는 방법으로, 이를 위하여 image의 gradient를 계산하게 된다.
3.1. Optical Flow
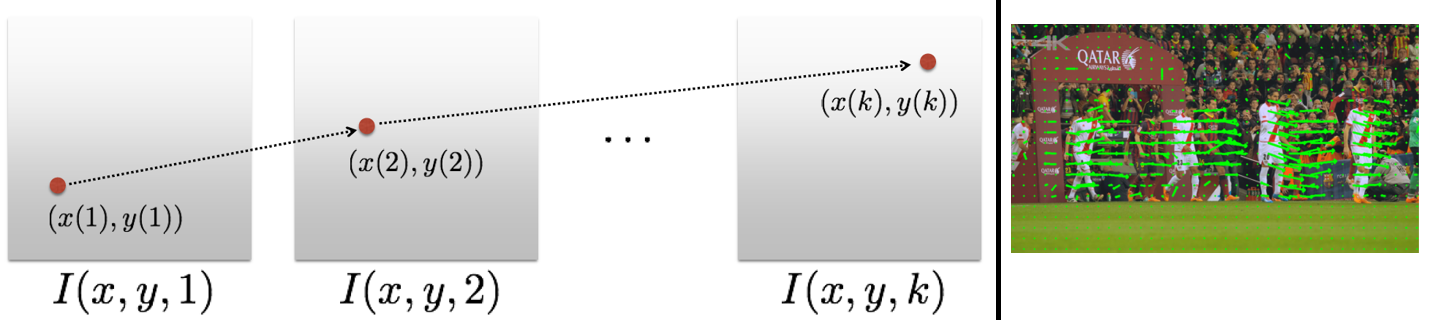
Optical flow는 시간 경과에 따른 pixel들의 움직임을 계산하는 방법으로 대표적인 방법으로 Lucas-Kanade 방법이 있다. 이러한 optical flow를 사용하면 특징점의 움직임이나 image pixel 전체의 움직임을 추적할 수 있다. 아래의 그림을 보면 optical flow를 적용함으로써 움직이는 객체(축구선수)에 대한 픽셀을 추적할 수 있다.
Figure 7. Optical flow의 개념과 적용 결과
Optical flow 방법은 몇 가지 가정을 하여 식을 유도하며, 첫번째로 같은 객체에 대한 포인트의 픽셀값은 시간이 지나더라도 같으며(즉 위 그림에서 빨간 점에 대한 픽셀값은 모두 같음), 두번째로 픽셀의 움직임이 작아 시간에 따른 위치 변화를 (x+uδt,y+vδt)와 같이 선형적으로 쓸 수 있다는 것이다((u,v)는 optical flow에서 사용하는 픽셀의 속도). 이를 종합하면 다음과 같이 쓸 수 있다.
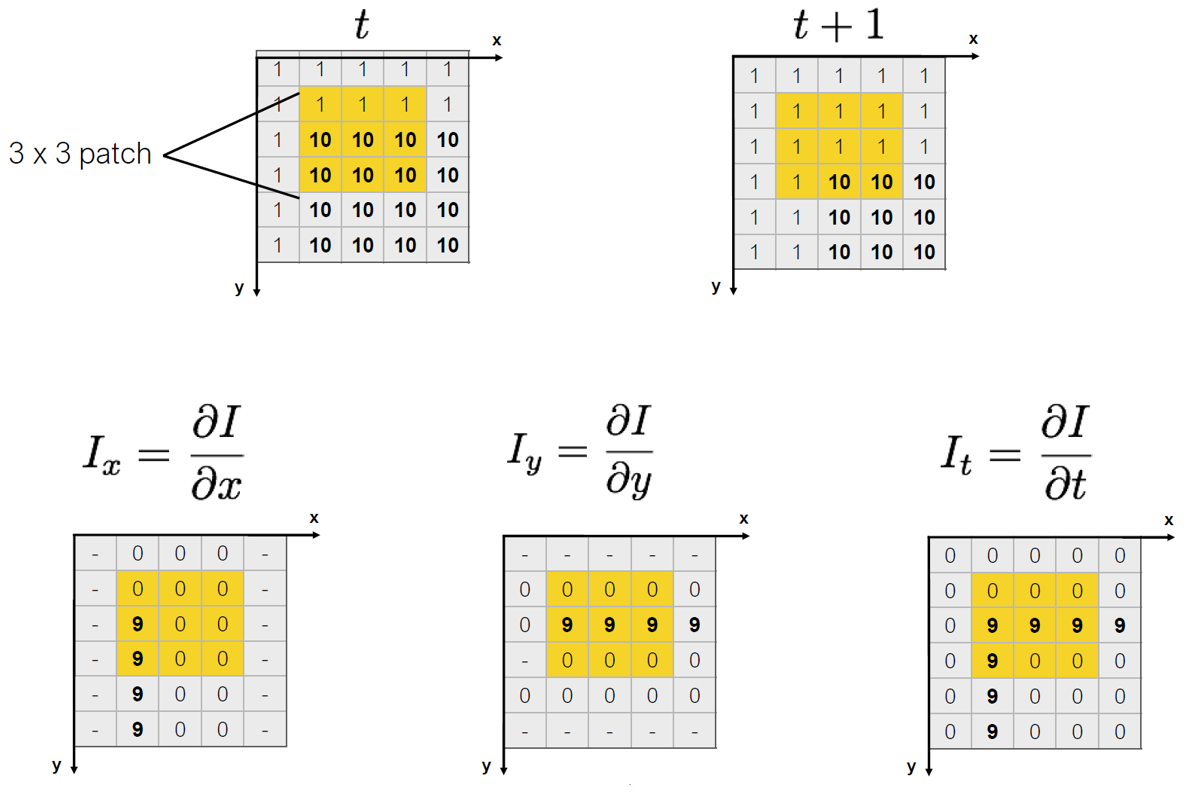
여기서 Ix,Iy는 각각 image I에서 x,y방향의 gradient이다. 이러한 image gradient는 다음 그림과 같으며, Harris corner detector에서도 언급하였듯이 Scharr 또는 Sobel 필터와의 convolution 연산을 통해 구할 수 있다.
Figure 8. Image gradient
Optical flow의 목표는 픽셀의 속도인 (u,v)를 찾는 것으로, 미지수가 2개이므로 이를 결정하기 위하여 contraint가 더 필요하다. Lucas-Kanade 방법에서는 추가적으로 한 patch내에서는 모든 픽셀이 같은 속도를 갖는다는 가정을 추가하여 식을 세운다.
해당 가정 상에서 만약 5×5 patch를 사용한다면 다음과 같이 25개의 식을 세울 수 있다.
해당 식은 SVD 등을 통한 least squre 문제로 해결해도 되며, 가능하다면 Ax=b→ATAx=ATb→x=(ATA)−1ATb과 같이 풀 수도 있다. 만약 A의 column vector들이 일차독립이라면 QR decomposition이 가능하여 ATA=(QR)TQR=RTQTQR=RTR인데, R은 삼각행렬로 가역행렬이므로 RTR=ATA또한 가역행렬이다. 위의 optical flow 문제에서 A의 행은 2개 밖에 안되어 대부분의 경우 두 행이 선형 독립일 것이며, ATA는 2×2행렬이므로 (ATA)−1ATb를 구하는 것이 더 편리할 것이다.
3.2. Tracking
Optical flow가 image gradient를 기반으로 특정 위치의 픽셀 움직임을 예측하는 방법이었다면, tracking은 다음과 같은 식 처럼 어떤 template image를 warping하여 가장 일치하는 부분을 찾는 방법이다.
pminx∑(I(W(x;p))−T(x))2
여기서 x는 영상 내 픽셀 좌표, p은 transform parameter, W는 image warping 함수(trasformation이라고 보면 됨), I,T는 각각 원래 이미지와 template 이미지이다. 위의 식은 같은 객체가 촬영되었다면 다른 시점에서 촬영되어도 같은 픽셀값을 같는다는 불변성 가정에 기반한다.
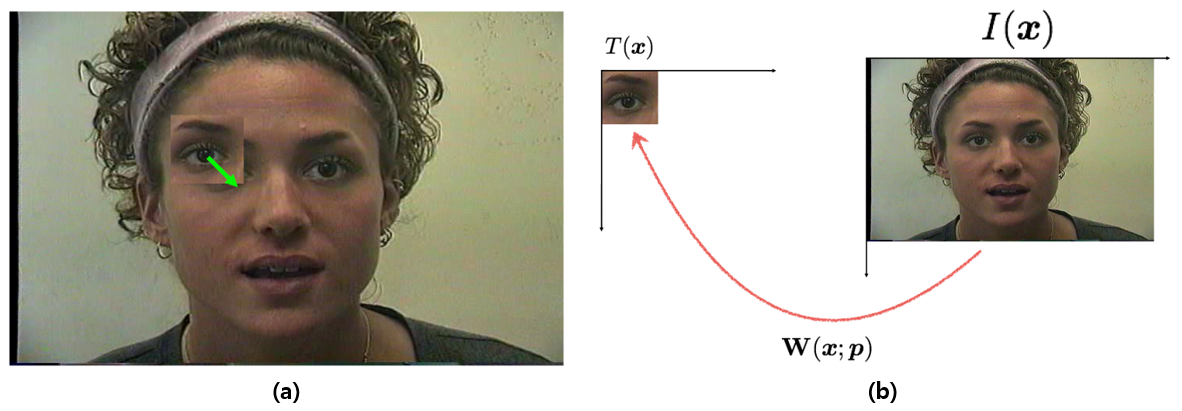
Track 문제는 아래 그림과 같이 볼 수 있으며, 하나의 template image가 주어지고 연속적인 입력영상이 주어질 때마다 적절한 p를 찾을 수 있다면, template image에 해당하는 객체의 위치를 지속적으로 추적할 수 있다.
Figure 9. (a) tracking의 목적, template image의 위치를 찾아내어 추적함, (b) tracking 문제
우리가 원하는 것은 위의 식을 만족하는 p를 찾는 것이지만, p가 들어있는 함수 I가 non-parametric 함수(paramter로 표현할 수 없는 함수, I는 입력 위치에 대한 영상의 intensity 값을 반환하는 함수이므로 특별한 식으로 표현할 수 없음)이고 전체식에 제곱을 취하여 linear하지도 않다. 따라서 위의 식을 풀기 위하여 주어진 식을 선형화하는 작업이 필요하며, 이를 위해 먼저 p에 대한 적당한 initial guess가 주어졌다고 가정하여 아래와 같이 쓴다.
결과적으로 A=∇I∂p∂W, b=[T(x)−I(W(x;p))]로 두었을 때 목표식이 least square 문제가 되며, 앞에서 이 문제의 해는 (ATA)−1ATb로 주어짐을 보았다. 따라서 해는 다음과 같이 쓸 수 있다.
Δp=H−1x∑[∇I∂p∂W]T[T(x)−I(W(x;p))]⋯(ATA)−1ATb
H=x∑[∇I∂p∂W]T[∇I∂p∂W]⋯ATA
이렇게 최적의 Δp를 구할 수 있었지만, 사실 처음의 initial guess가 부정확하다면 한번에 정확한 위치를 알아내기 어려울 수 있다. 이러한 문제를 해결하기 위해 pi+1←pi+Δp와 같이 업데이트하고 같은 과정을 반복하여 더욱 정확한 위치를 찾을 수 있다.
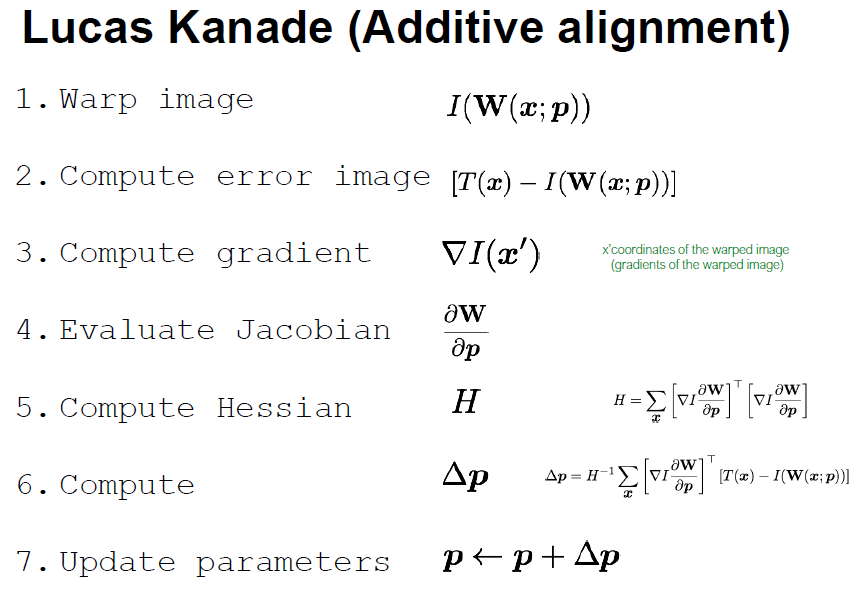
이러한 방법을 Lucas-Kanade alignment라고 하며, 전체적인 알고리즘은 다음과 같다.
Figure 10. Lucas-Kanade alignment 알고리즘
이제 이러한 alignment 알고리즘을 변화하는 영상에 대해서 지속적으로 수행하면 tracking이 가능하다.
4. Motion Field
Optical flow가 이미지의 픽셀값이 어떻게 변화하는 지(image gradient 등)를 통해 픽셀의 움직임을 추정한다면, Motion Field는 실제로 촬영되는 객체와 카메라의 상대적인 motion(3D)를 알고있을 때, 해당 motion을 2D image plane에 투영하여 픽셀의 움직임을 추정하는 방법이다.
만약 정지해 있는 객체를 촬영할 때 조명이 변화한다고 가정했을 때, optical flow의 경우 어떤 값을 출력하지만, motion field는 0이 된다.
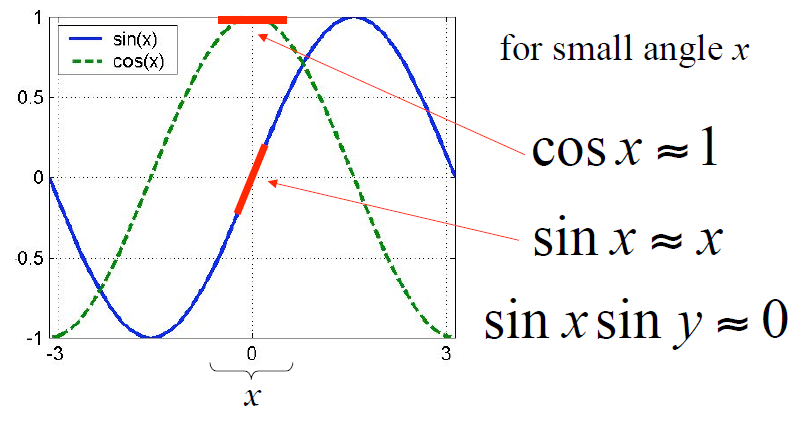
3D에서 어떤 물체 P가 이동할 때, 그 변위는 d=RP+T−P이며, 작은 각도를 가정한다면, d=(I+s^)P+T−P=s^P+T가 된다. 이때, 시간 간격이 충분히 작다면 위의 식을 변위가 아닌 속도에 대한 식으로도 사용 가능하며, 다음과 같다.
V=T+ω×P
여기서 V는 물체의 속도, T는 물체의 선속도 ω=(ωx,ωy,ωz)T는 물체의 각속도이다. 만약, 물체가 정지해 있고 카메라가 위와 같이 움직인다면, 카메라의 시점에서 물체가 V=−T−ω×P와 같이 움직이는 것으로 보인다. 이는 부호만 변경된 식이며, 여기서는 이 식을 사용한다.
보통 corresponding points를 찾을 때 feature extractor & descriptor나 feature extractor & optical flow(or tracker) 등의 조합을 사용할 경우 굉장히 많은 수의 point를 검출하게 된다. 또한 굳이 computer vision 분야 뿐만 아니라 수많은 데이터가 주어졌을 때 해당 데이터에 노이즈가 섞여있다면 해당 데이터를 완벽히 설명하는 모델을 만드는 것이 불가능하기 때문에 최대한 많은 수의 데이터를 잘 설명할 수 있는 모델을 찾게된다. RANSAC 알고리즘은 이러한 목적을 위해 사용되며, 다음과 같은 과정으로 이루어져 있다.
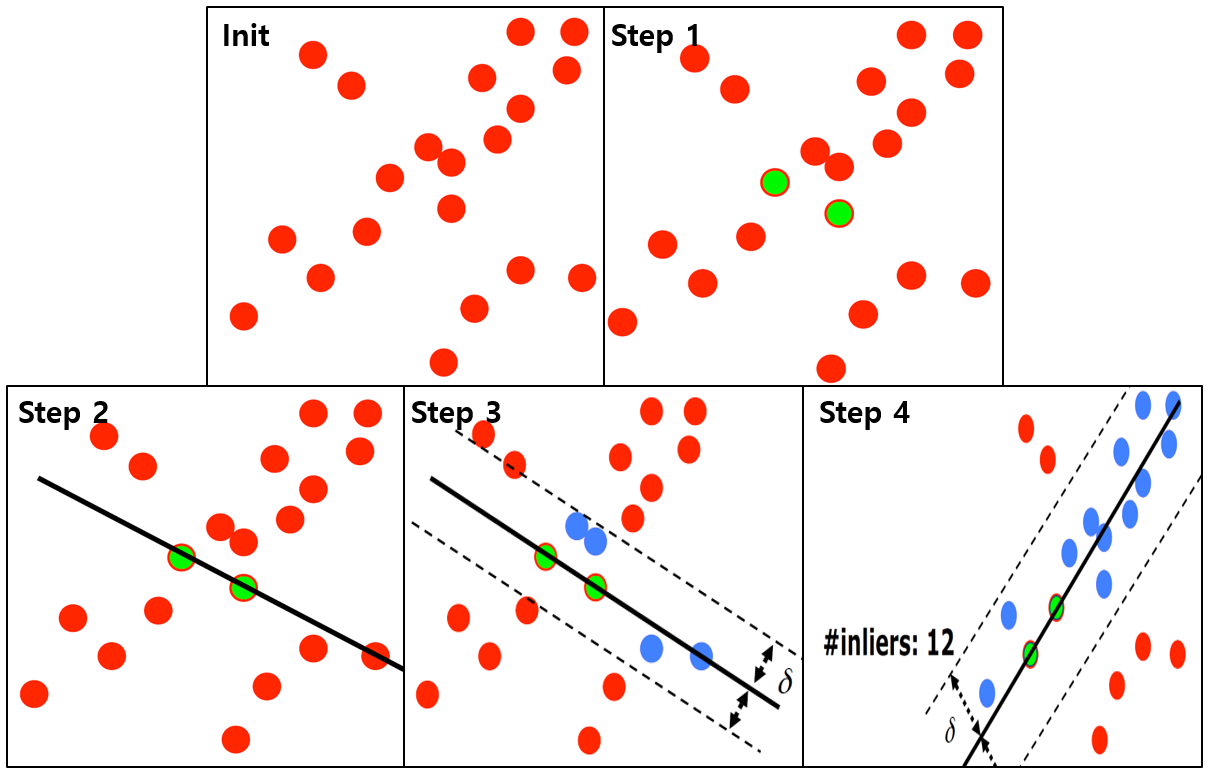
Figure 9. RANSAC 알고리즘
Step 1. 데이터 중 일정 갯수의 데이터를 무작위로 선택 (sample)
Step 2. 선택된 데이터를 설명하는 모델 생성 (compute)
Step 3. 생성된 모델을 전체 데이터에 적용하여 일정 threshold 안에 포함되는 데이터(inlier)의 갯수 측정 (evaluate)
Step 4. 최적의 모델을 찾을 때까지 1~3의 과정을 반복 (repeat)
이러한 RANSAC을 통해 여러 개의 데이터에 대해서 최적의 모델을 찾을 수 있으며, 노이즈를 너무 많이 포함하고 있는 outlier를 걸러내는 역할도 하게 된다.