간단한 로봇을 만들어보자
로봇 몸 만들기

Create -> Shape -> Cube를 눌러서 상자를 만들어준다.
이후 Translate의 Z축을 1로 변경하고 Scale을 (1, 2, 0.5)로 변경해준다.
로봇 바퀴 만들기
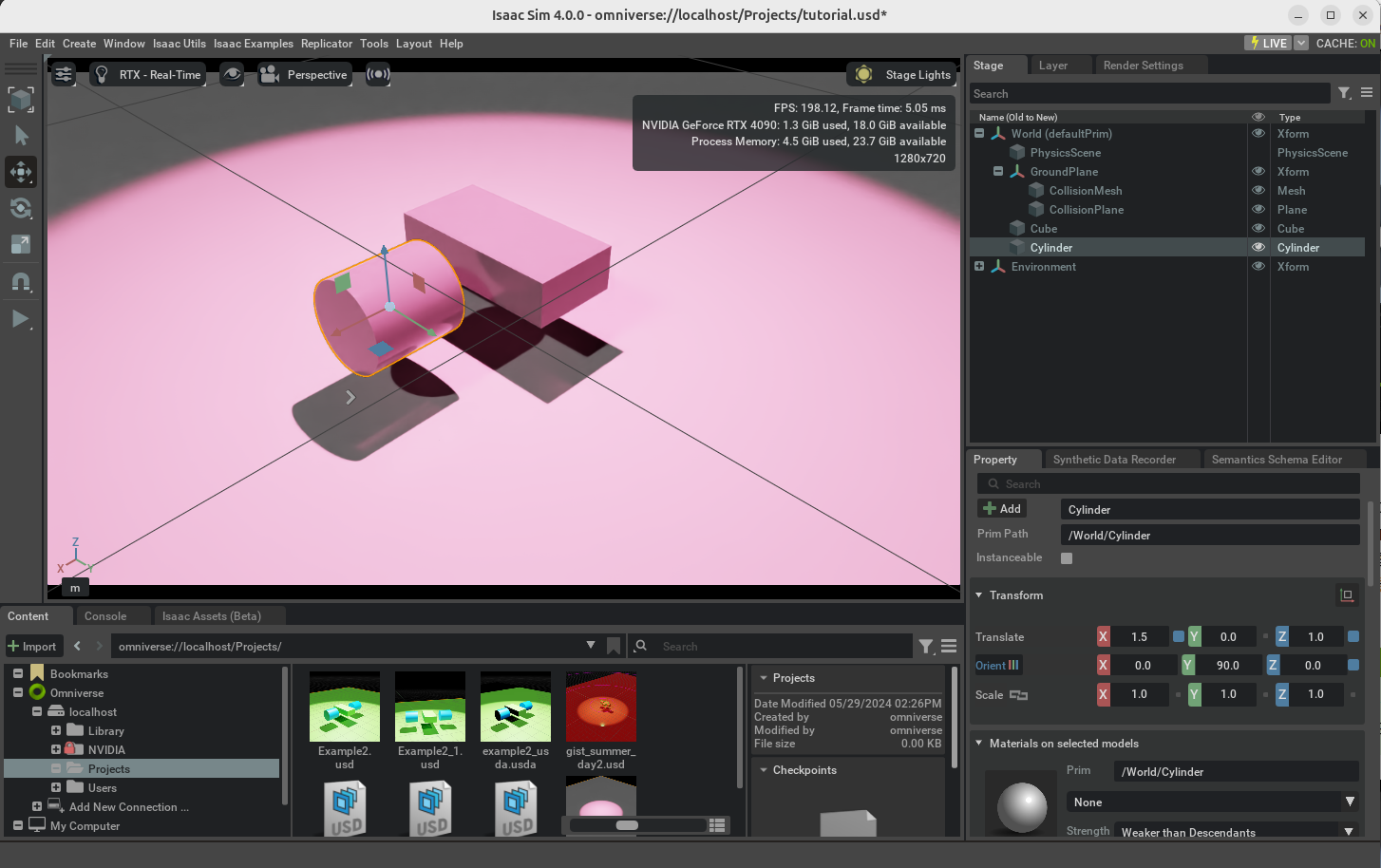
Create -> Shape -> Cylinder를 눌러 원통을 만들어준다.
Property tab의 Geometry로 가서 Radius를 0.5, Z축을 기준으로 Height을 1로 변경한다. (이미 다 되어있었음)
이후 Translate를 (1.5, 0, 1.0)으로 바꿔주고 Orient의 Y축을 90으로 변경한다.


이미 만든 원통을 우클릭 후 복제하여 Traslate의 X축을 -1.5로 변경하면 바퀴가 생성된다.
물리 효과 적용
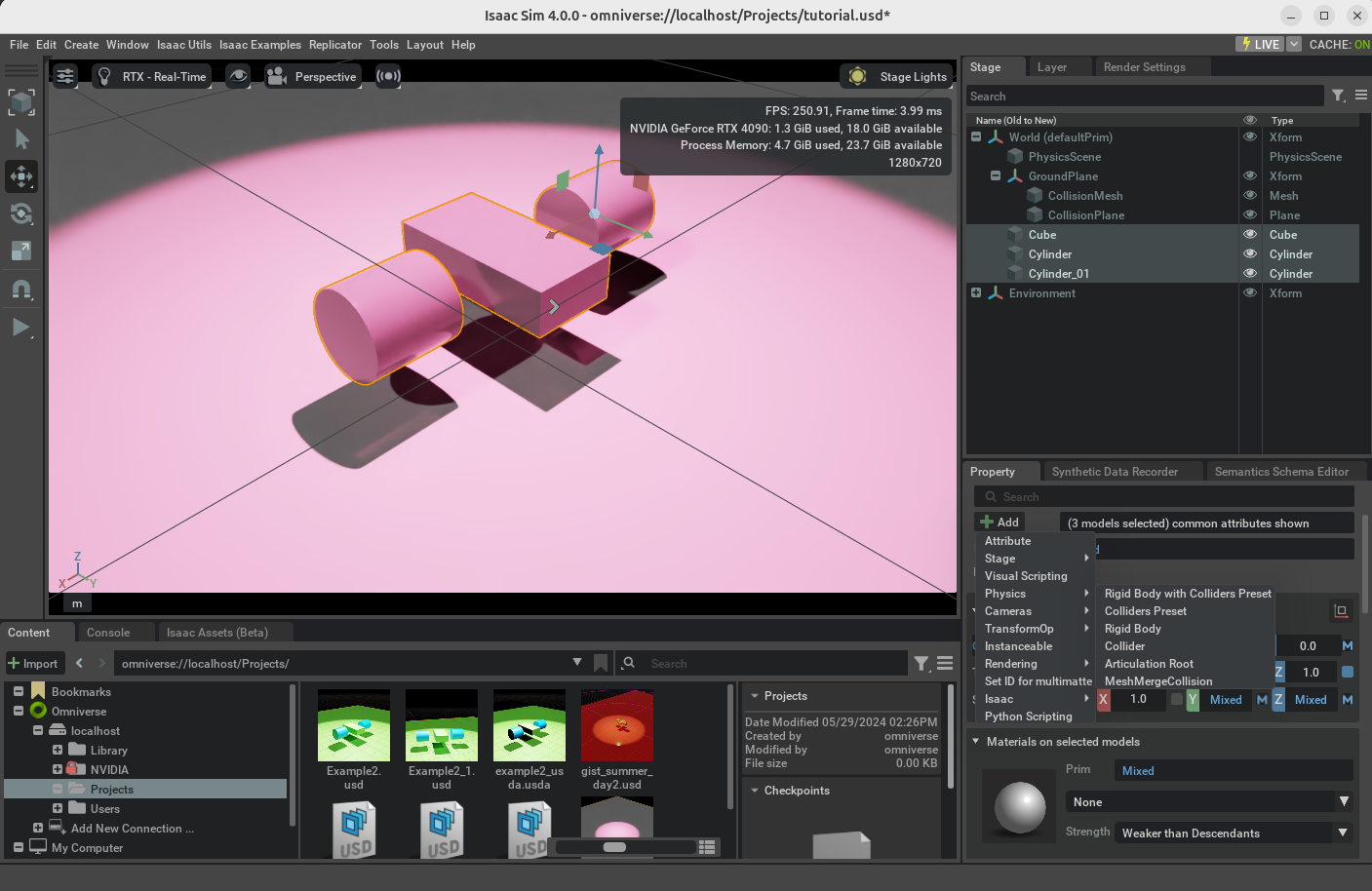
바로 시뮬레이션을 돌려보면 만들어 놓은 객체가 움직이지 않음을 확인할 수 있다.
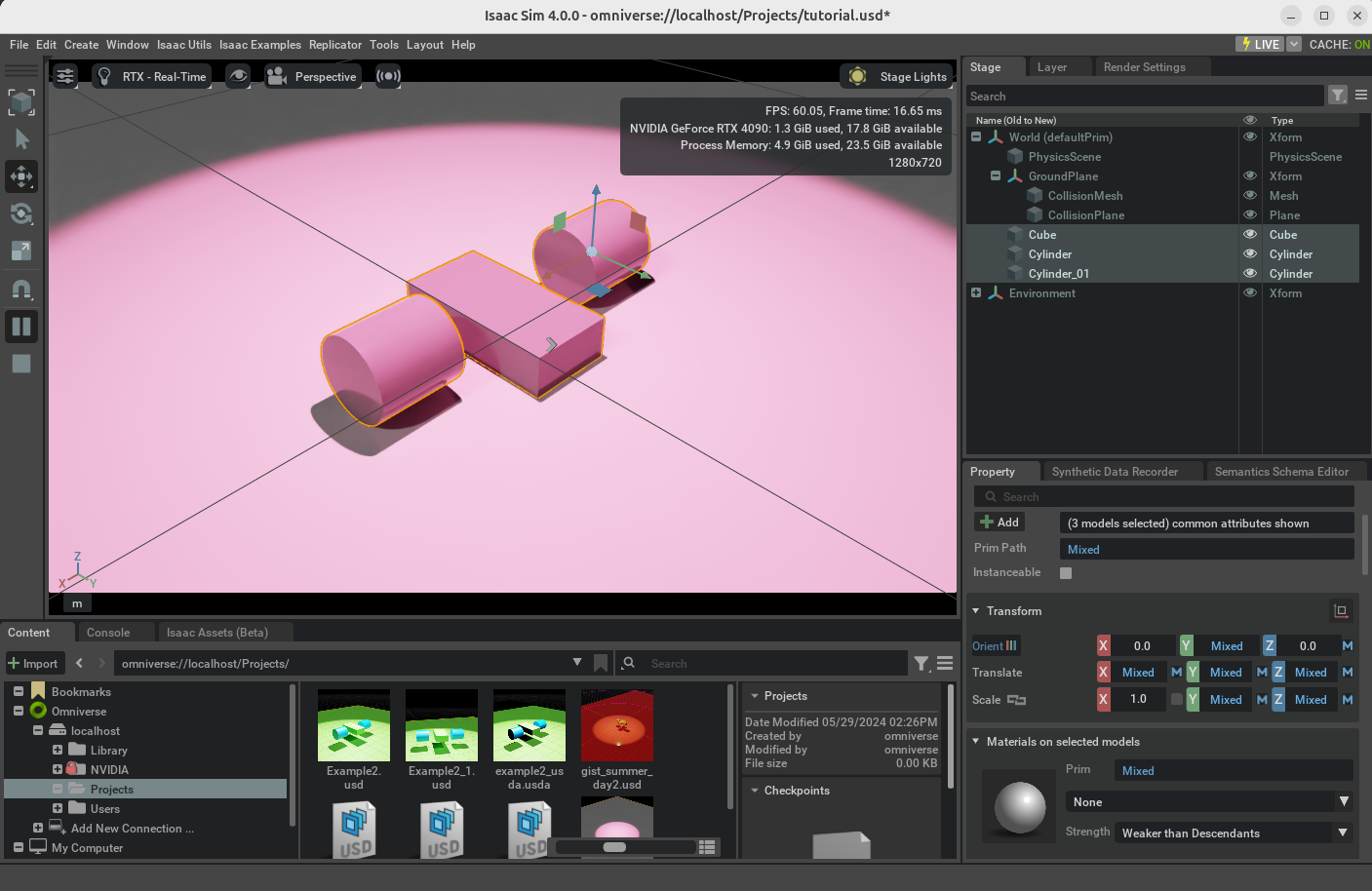
로봇의 몸통과 바퀴 두개를 모두 선택 후 Prperty의 Add -> Physics -> Rigid Body with Colliders Preset 을 추가해주고 시뮬레이션을 돌리면 중력에 영향을 받아 땅에 떨어진다.
충돌 검사 윤곽선 확인


상단의 눈 모양 -> Show By Type -> Physics -> Colliders -> All을 클릭하면 윤곽선이 추가된다.
접촉 및 마찰 매개변수 추가


Create -> Physics -> Physics Material을 클릭해준다.
그러면 Stage에 새로운 PhysicsMaterial이 생긴다.
이걸 클릭하여 매개변수를 수정할 수 있다.

이걸 만약 cube 객체에 적용하려면 cube를 클릭 후 Property 탭의 Materials on selected models에서 설정해준다.
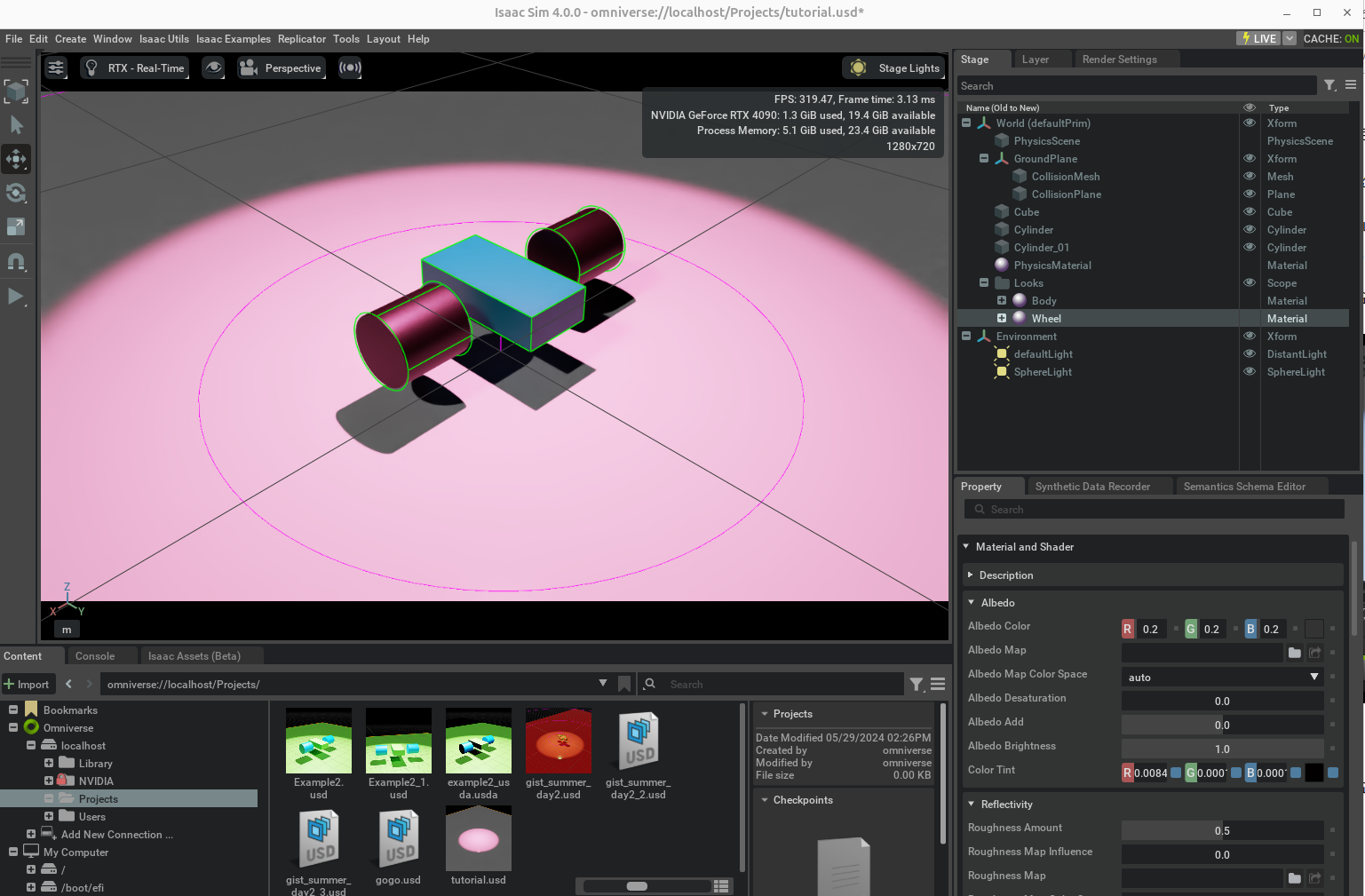
객체의 색상 변경


Create -> Material -> OmniPBR을 두번 눌러준다.
이후 Body와 Wheel로 이름을 변경해준다.
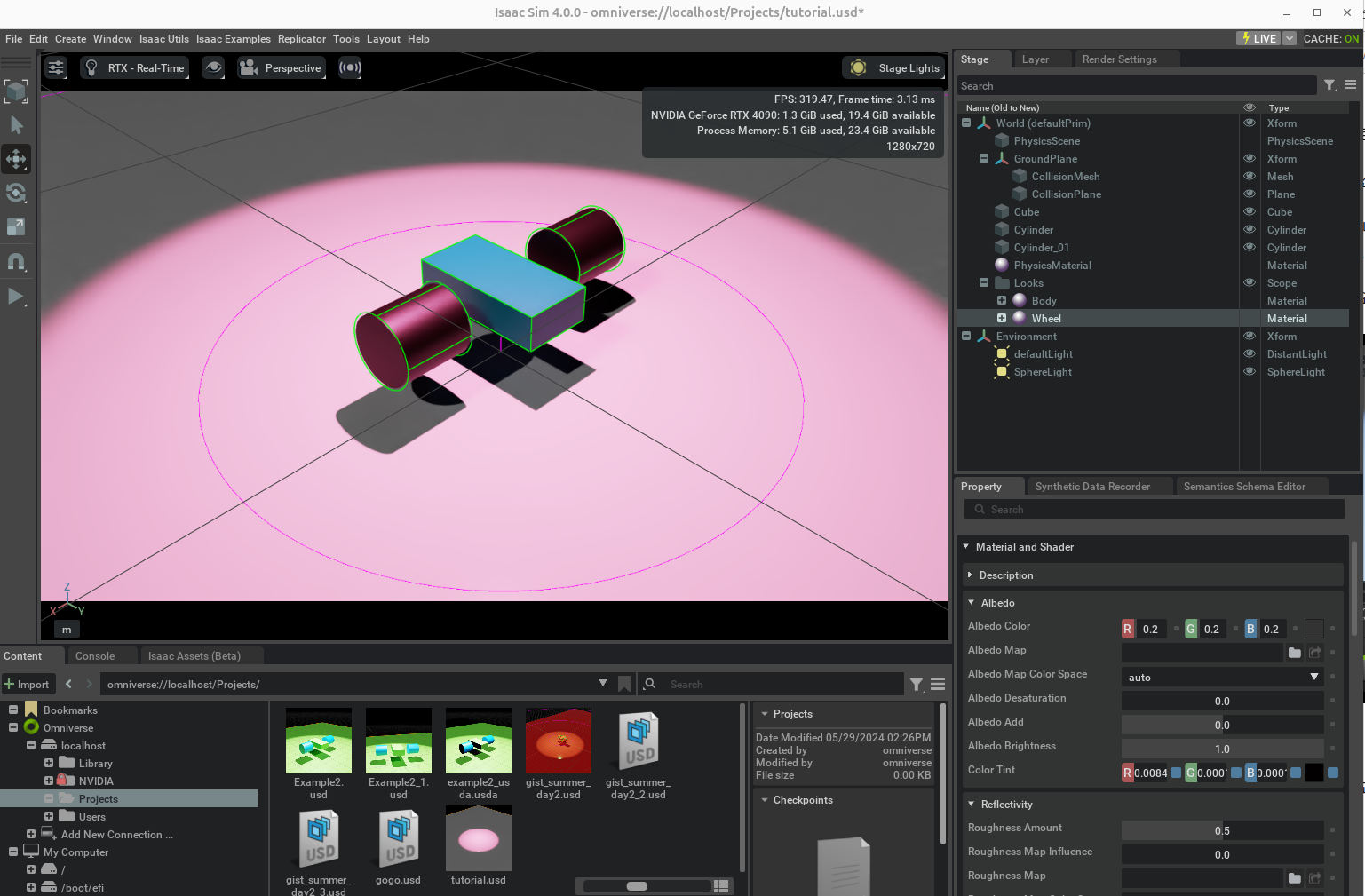
cube에는 body를 cylinder에는 wheel을 적용해주고 Looks의 Body와 Wheel의 색상을 변경해주면 색깔이 바뀐다.
