Nvidia Omniverse Isaac Sim
1.NVIDIA Omniverse Isaac Sim 튜토리얼 1.1 Isaac Sim Interface
오늘부터 NVIDIA Isaac Sim을 공부한다.공부하는 과정들을 기록해나갈것이다.NVIDIA Omniverse Isaac Sim은 NVIDIA Omniverse 플랫폼을 위한 로봇 시뮬레이션 툴킷이다.Isaac Sim은 가상 로봇 세계를 구축하고 실험하는데 필요한
2.NVIDIA Omniverse Isaac sim 튜토리얼 1.2 Isaac Sim WorkFlow

특징:가상 세계를 채우고 시뮬레이션하기 위한 시각적인 도구사용 용도:세계 구축, 로봇 조립, 센서 부착, ROS특징:비동기적으로 실행되어 스테이지와의 상호작용이 가능하고, hot reloading을 통해 즉각적으 로 변화를 반영하여 실시간 시뮬레이션을 위한 물리 단계를
3.NVIDIA Omniverse Isaac Sim 튜토리얼 2.1 Environment Setup
Edit -> Pregerences를 눌러 설정 패널을 열어준다.패널 왼쪽 열에서 카테고리별로 다양한 유형의 설정이 존재한다.stage를 선택해 살펴보자.Default Up Axis의 경우 Up을 결정하는 축이다. 기본값은 Z이다.stage unit이 2022.1 이전
4.NVIDIA Omniverse Isaac Sim 튜토리얼 2.2 Add Simple Objects
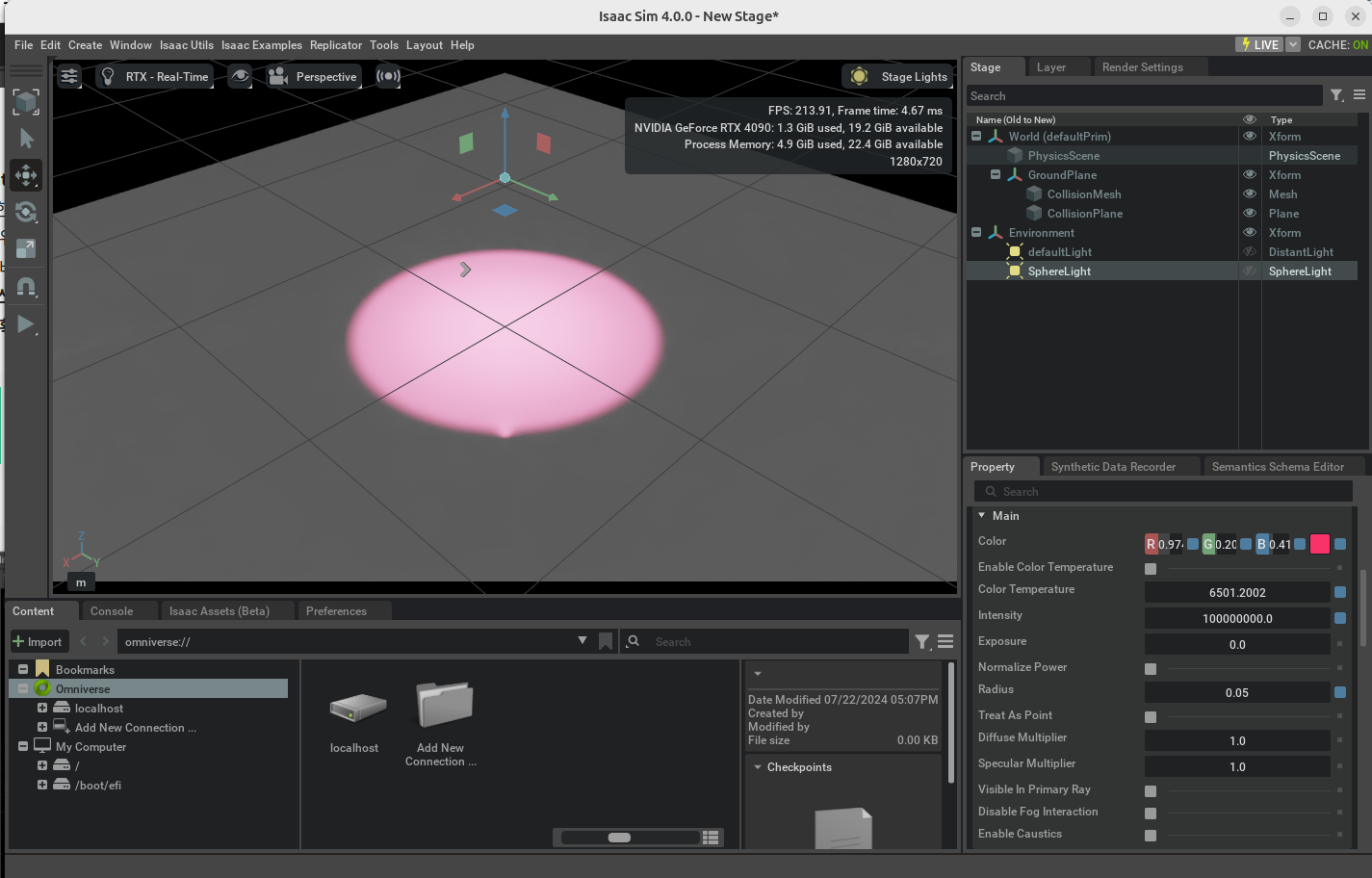
Create -> Shape -> Cube를 눌러서 상자를 만들어준다.이후 Translate의 Z축을 1로 변경하고 Scale을 (1, 2, 0.5)로 변경해준다.Create -> Shape -> Cylinder를 눌러 원통을 만들어준다.Property tab의 Geo
5.NVIDIA Omniverse Isaac Sim 튜토리얼 2.3 Working with USD
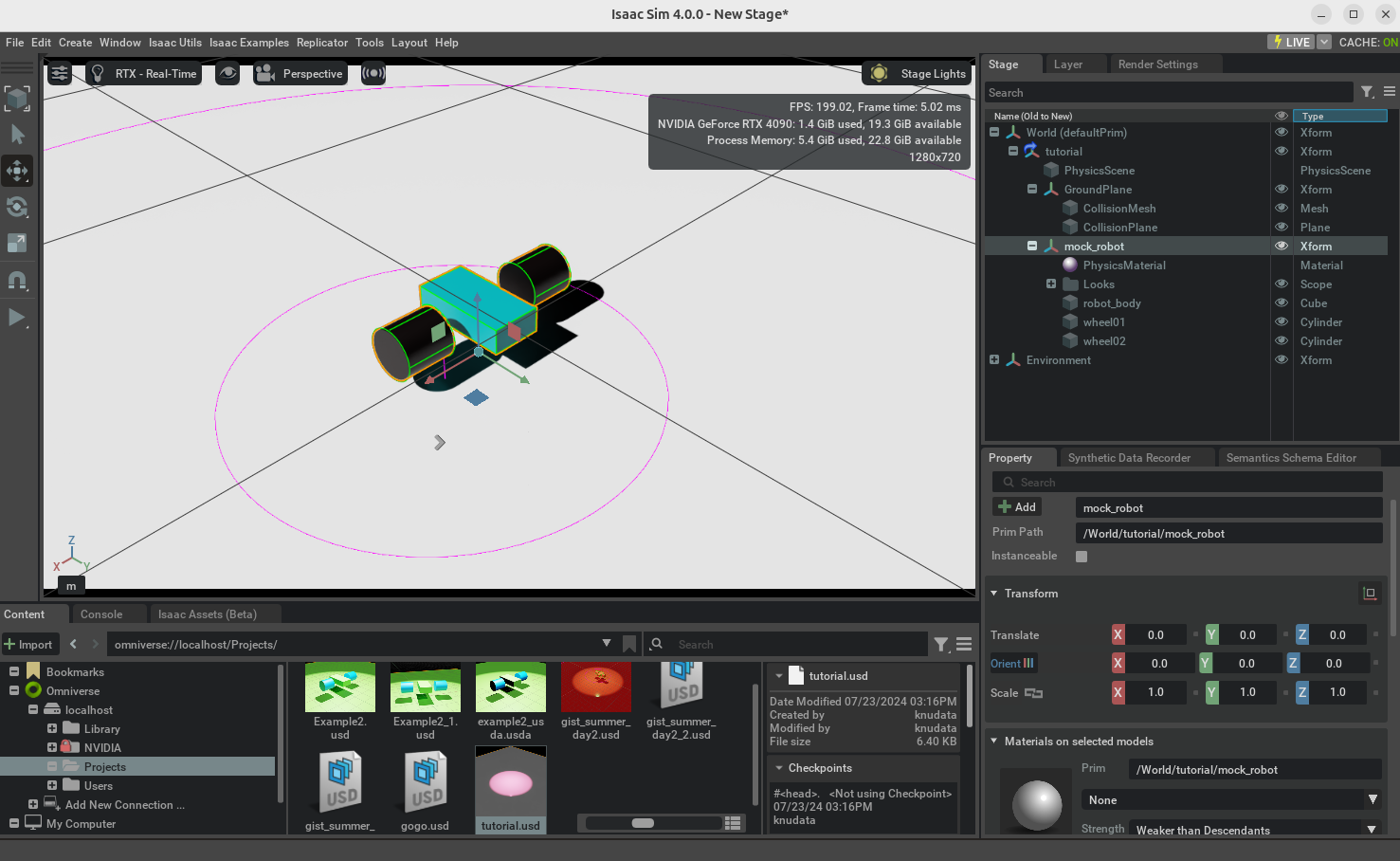
Save : 현재 USD 단계를 저장하려면 File -> Save 또는 File -> Save As로 진행Save Flattend As : 모든 구성 요소를 하나의 메시로 병합하여 파일을 저장as .usda files : usd 파일이 아닌 usda 파일로 저장을하게
6.NVIDIA Omniverse Isaac Sim 튜토리얼 2.4 Assemble a Simple Robot
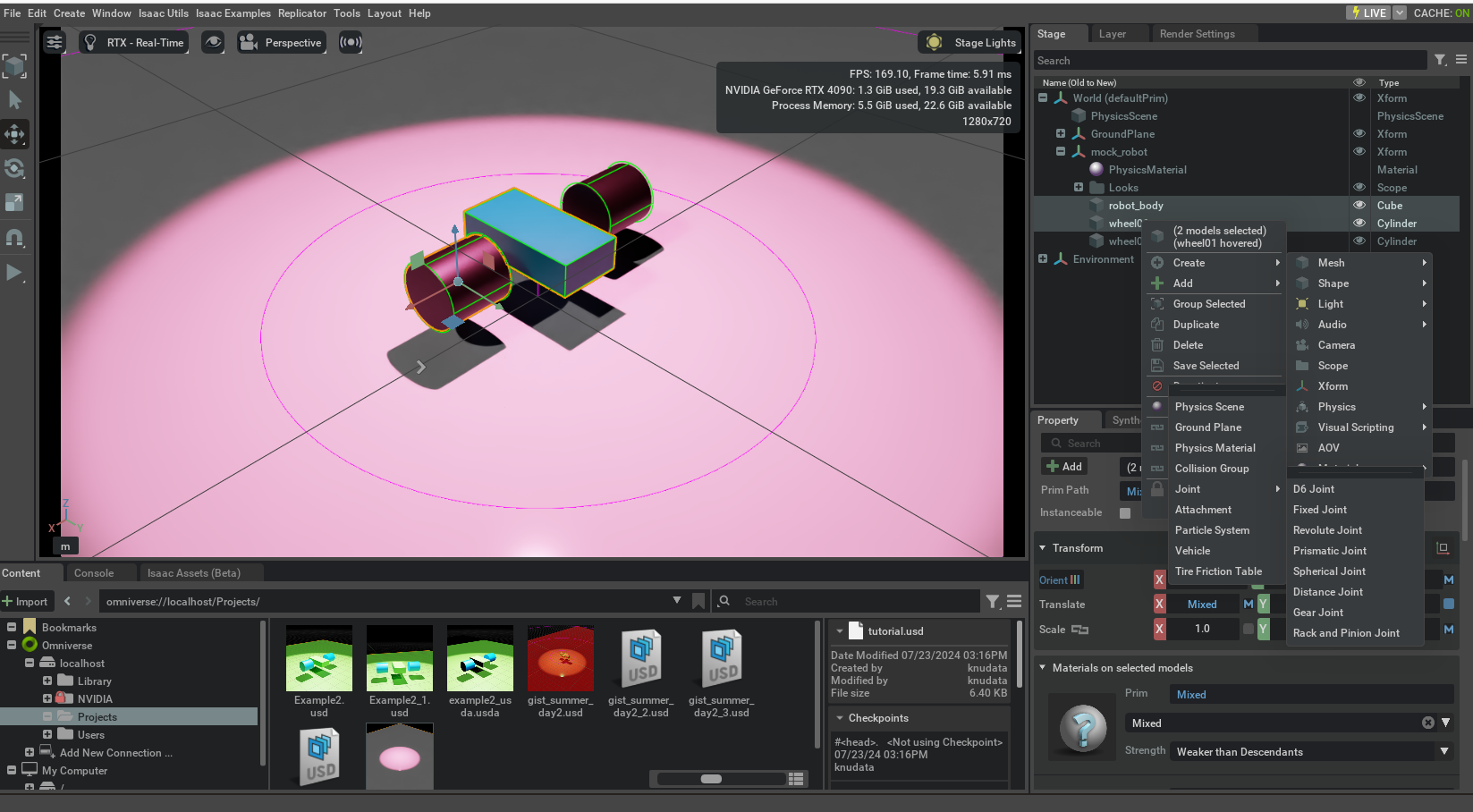
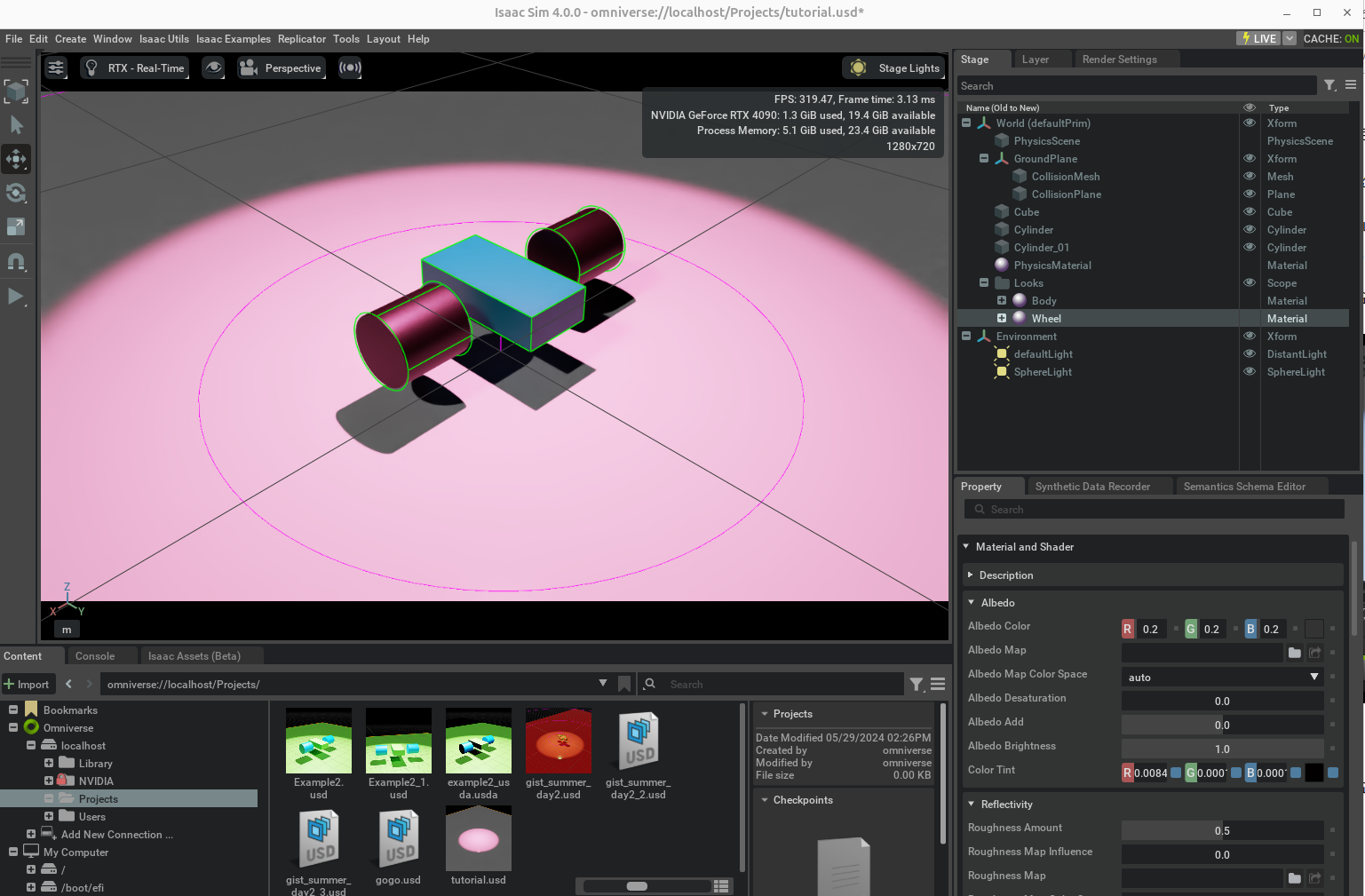
Body와 Wheel하나를 동시에 선택 후 Create -> Physics -> Joint -> Revolute Joint를 눌러준다. 보기 편하게 이름도 바꿔준다.Joint 축을 Y로 바꿔주고 Rotation과 Position 모두 해당하는 값들로 변경해준다.(공식
7.NVIDIA Omniverse Isaac Sim 튜토리얼 2.5 Add Camera and Senosors
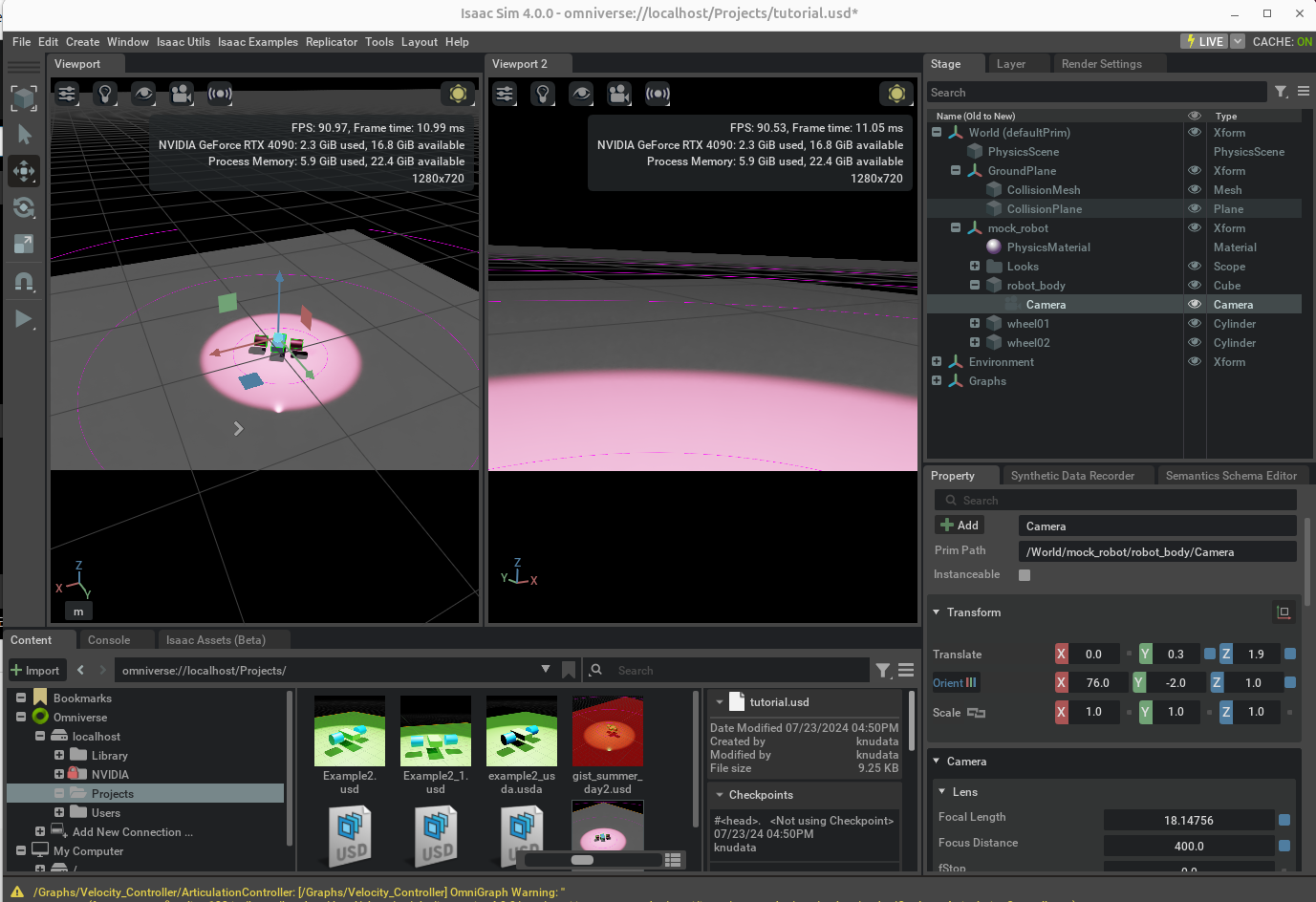
Create -> Camera를 통해서 카메라 생성 가능이후 왼쪽 상단의 캠코더를 클릭 후 Cameras를 선택하면 해당 시점으로 볼 수 있음(나는 Gray wire frame이 나타나지 않았음.. 4.0.0 버전이라 그런가... 뭐지)Isaac Utils -> Wor
8.NVIDIA Omniverse Isaac Sim 2.6 Interactive Scripting
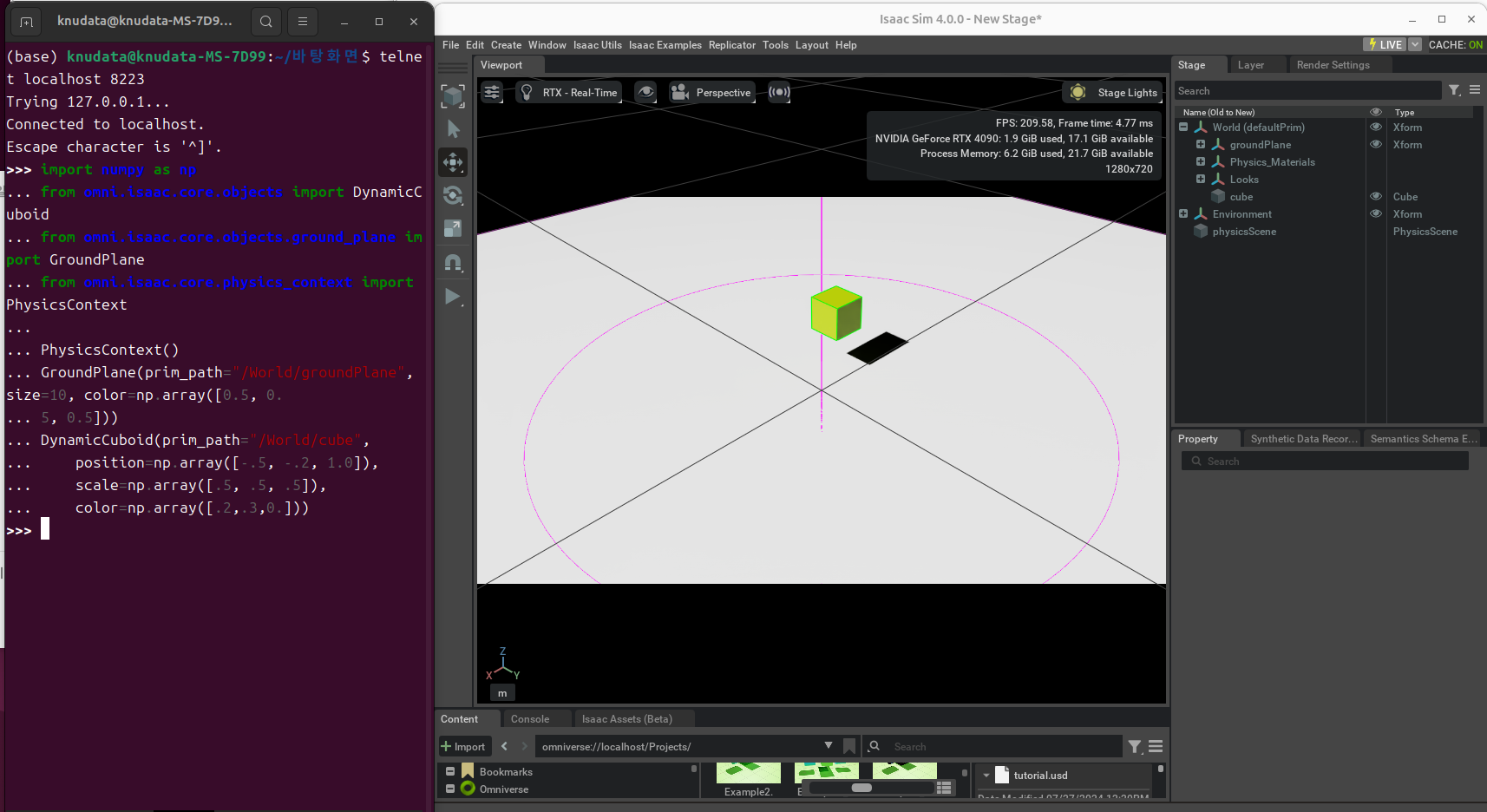
새로운 파일에서 시작한다.Windows -> Script Editor을 클릭해 스크립트 편집기를 열어준다.여러 탭을 만들 수 있는데 이 탭들은 동일한 환경을 공유하므로 한 탭에서 실행한 라이브러리나 정의된 변수는 다른 환경에서도 엑세스하여 사용이 가능하다.REPL은 '
9.Anaconda로 Isaac Sim 실행하기
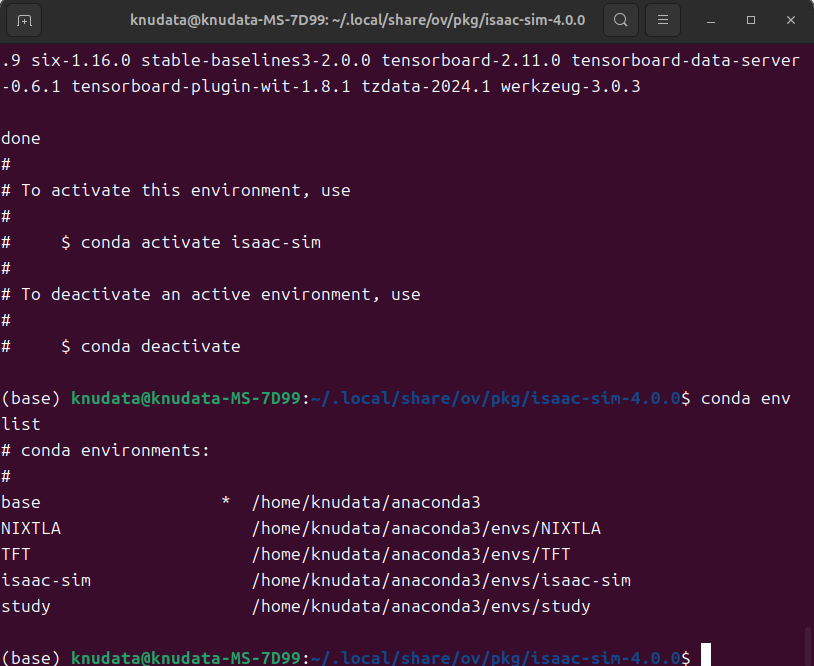
/home/knudata/.local/share/ov/pkg/isaac-sim-4.0.0이렇게 비슷한 루트로 해당 폴더로 가준다. 해당 폴더에서 터미널을 열어준다.만약 기존 가상환경이 있을 경우 삭제 후 다시 깔아준다.필요한 라이브러리들이 설치가된다.를 통해 확인하면
10.NVIDIA Omniverse Isaac Sim 2.7 OmniGraph
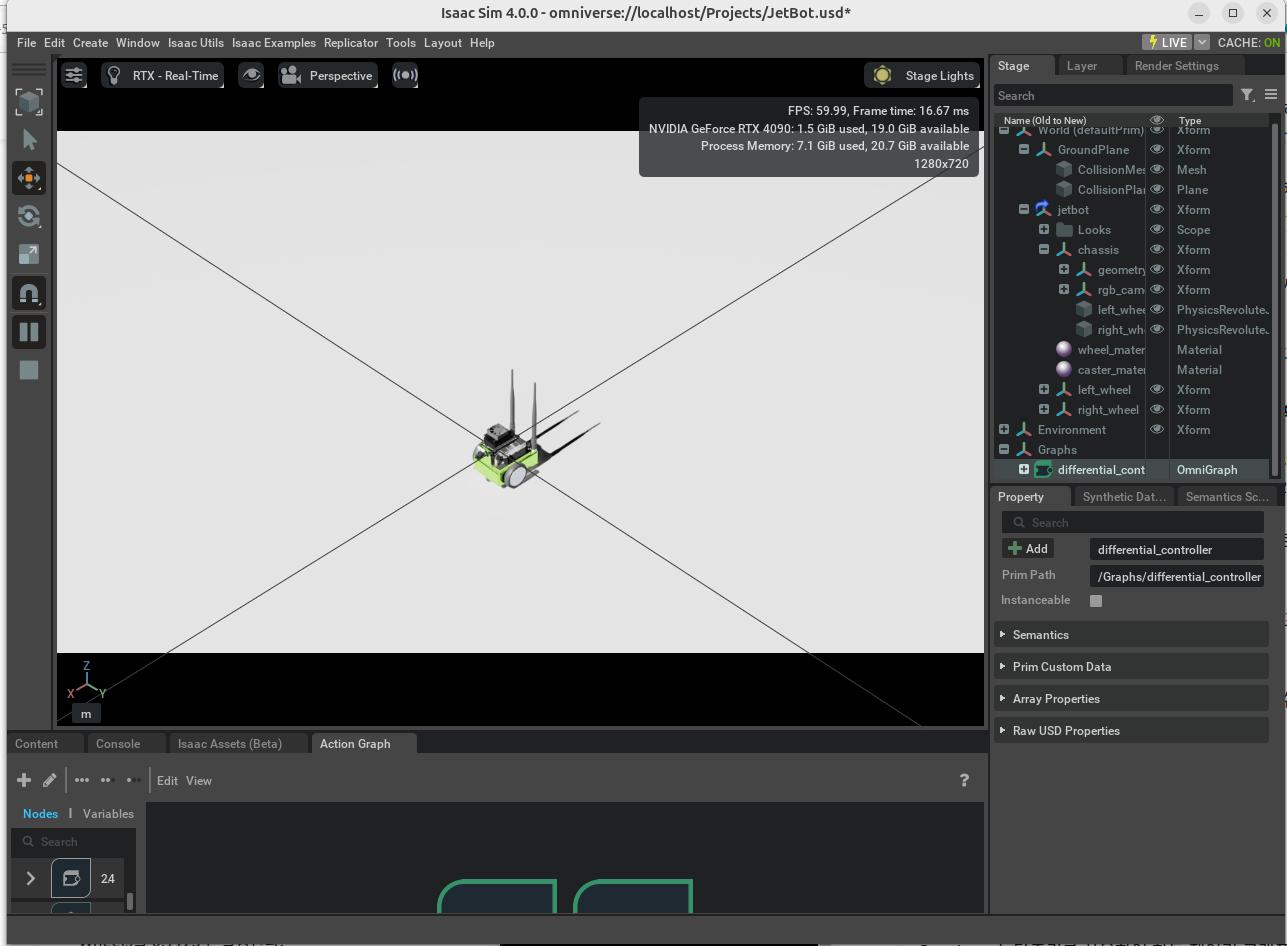
OmniGraph OmniGraph는 Omniverse의 시각적 프로그래밍 프레임워크이다. Omniverse 내부의 여러 시스템에서 함수를 연결하는 그래프 프레임워크를 제공한다. 또한 Replicator, ROS 및 ROS2 Bridge, sensor 엑세스, 컨트롤
11.NVIDIA Omniverse Isaac Sim 3.1 Running Python Code from External Editors
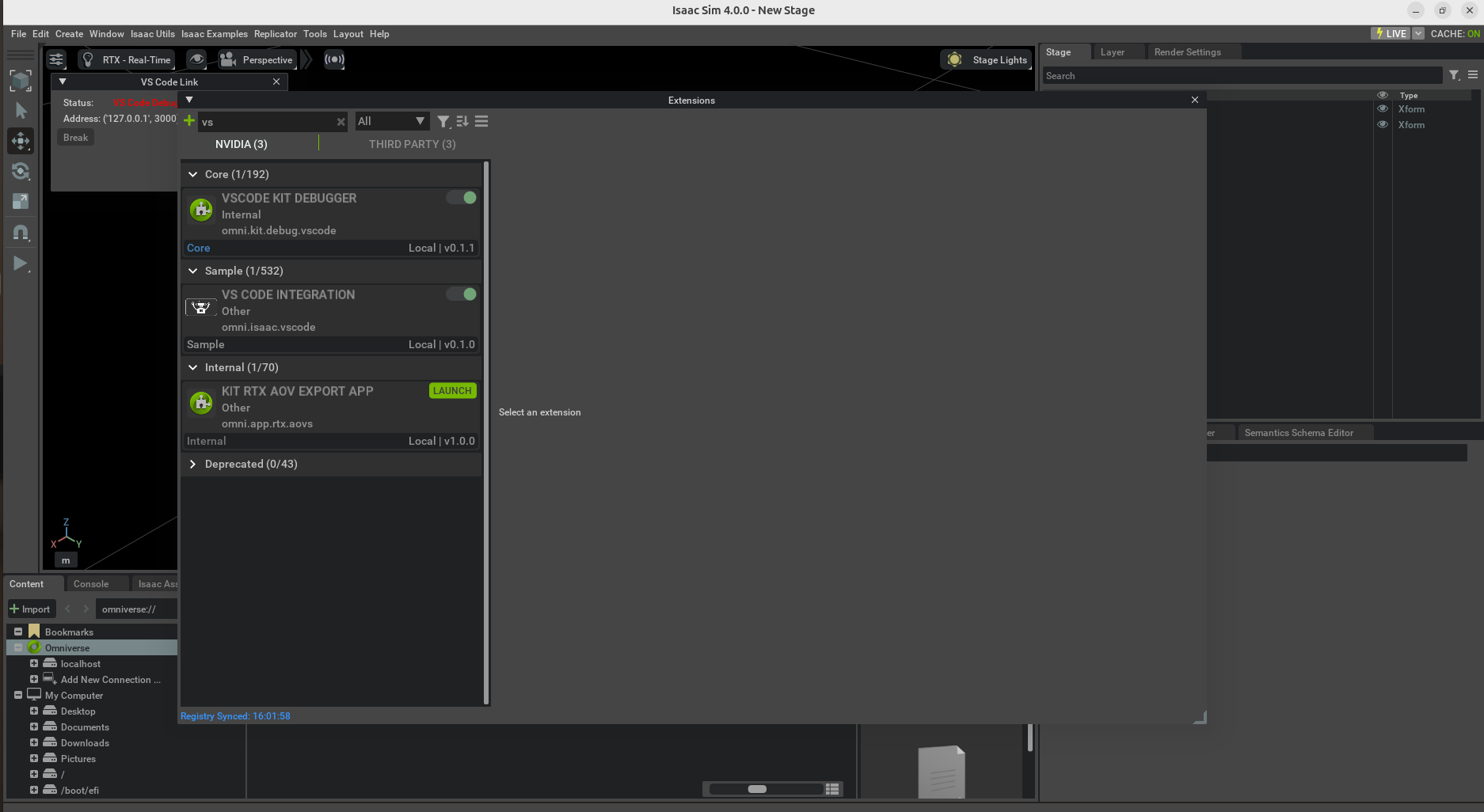
Isaac sim 애플리케이션 내에서 VS code를 사용해서 편집하고 실행할 수 있다.omni.isaac.vscode 확장 기능을 사용하면 VS code 편집기에서 python 스크립트를 편집하고 실행 가능하다.Extensions에 들어가 vscode를 검색 후 활성