joint 추가
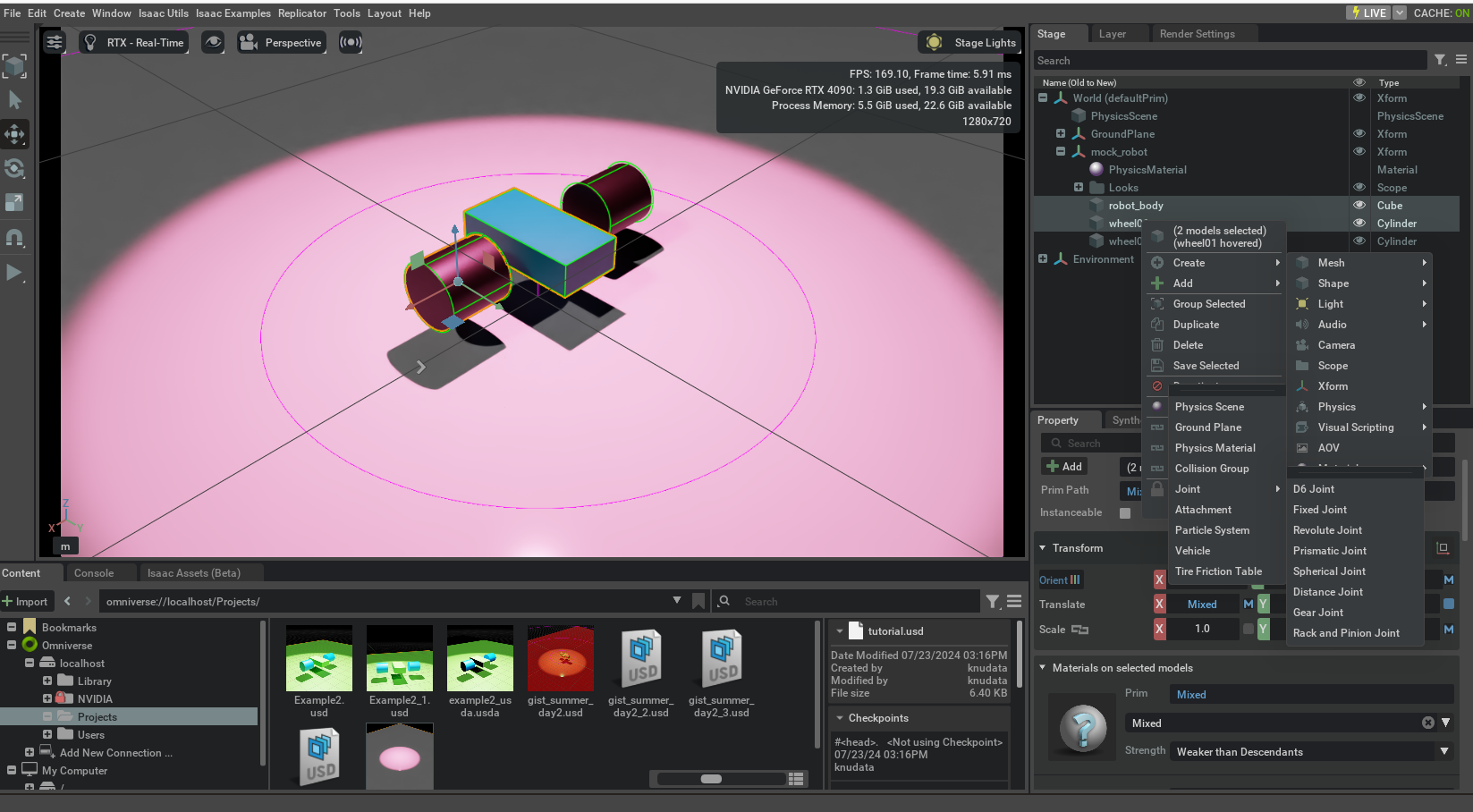
Body와 Wheel하나를 동시에 선택 후 Create -> Physics -> Joint -> Revolute Joint를 눌러준다. 보기 편하게 이름도 바꿔준다.
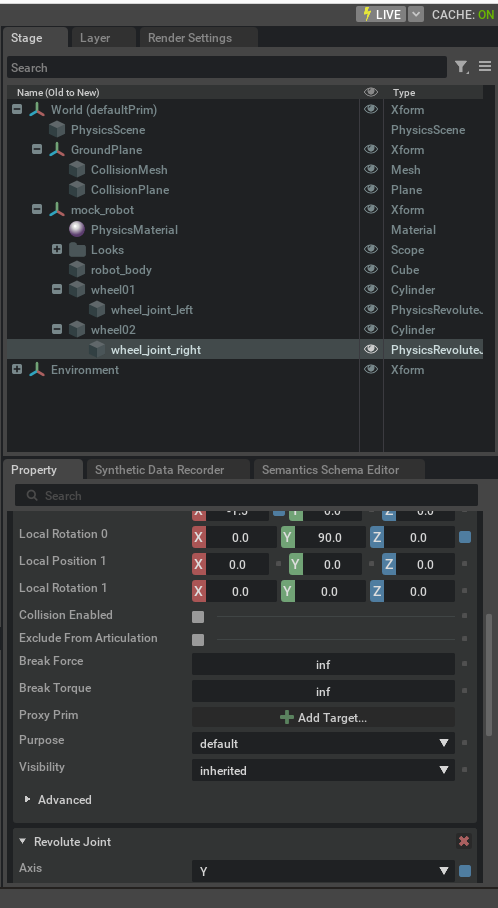
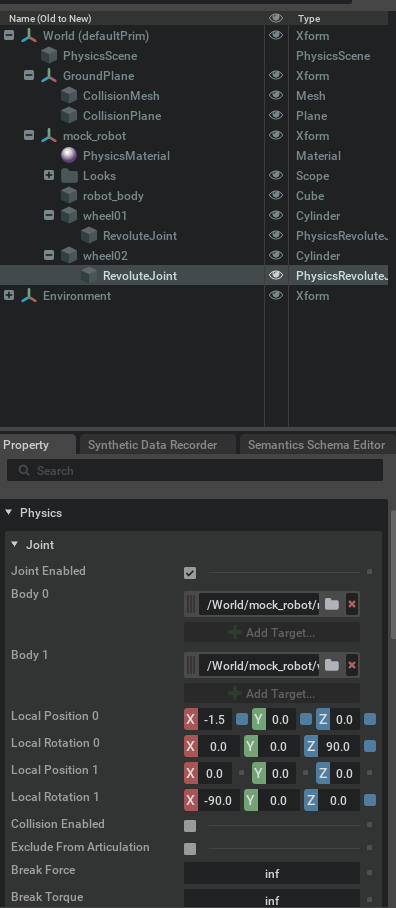
Joint 축을 Y로 바꿔주고 Rotation과 Position 모두 해당하는 값들로 변경해준다.
(공식 홈페이지의 튜토리얼에서 명시되어 있는 값과는 다르다. 각 로봇마다 변경해줘야하는 값이 다르다고 한다. 노가다를 통해서 찾게된 값이다.)
다른 바퀴도 동일하게 진행해준다.
##joint Drive 추가
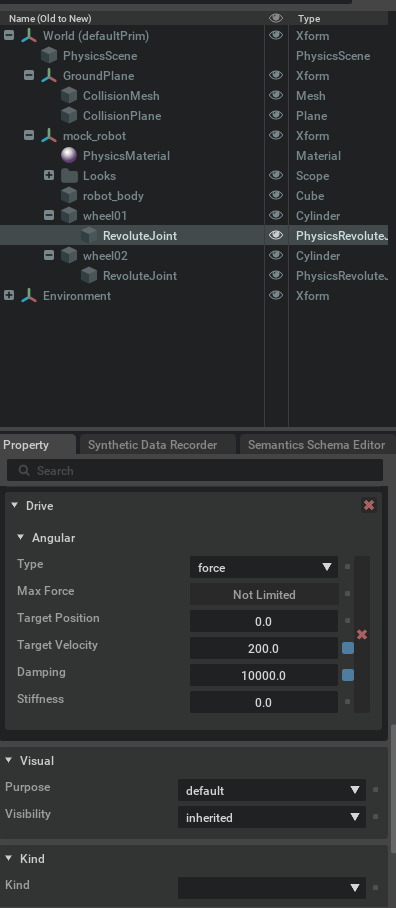
두 조인트를 모두 선택하고 우클릭을 통해 Create -> Physics -> Angular Drive를 선택한다.
두 바퀴의 Damping은 1e4로 Target velocitiy는 200으로 설정한다.
그 후 시뮬레이션을 진행하면 앞으로 나아감을 확인할 수 있다.
관절 추가
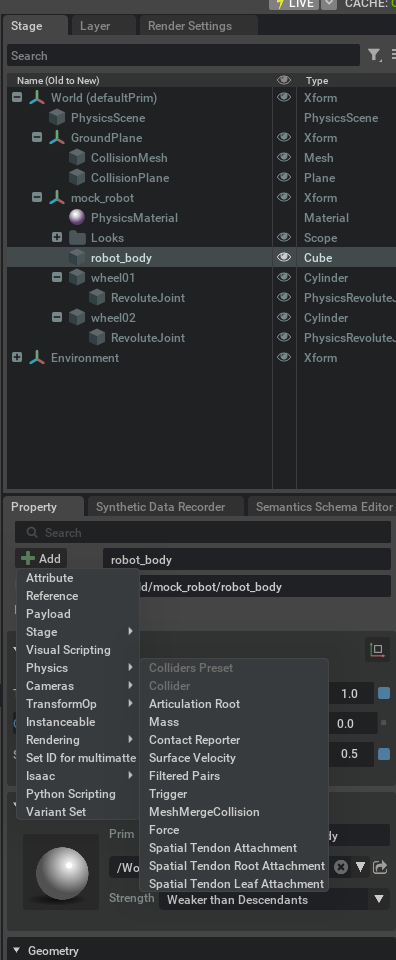
Body를 선택 후 Add -> Physics -> Articulation Root를 클릭한다.
컨트롤러 추가
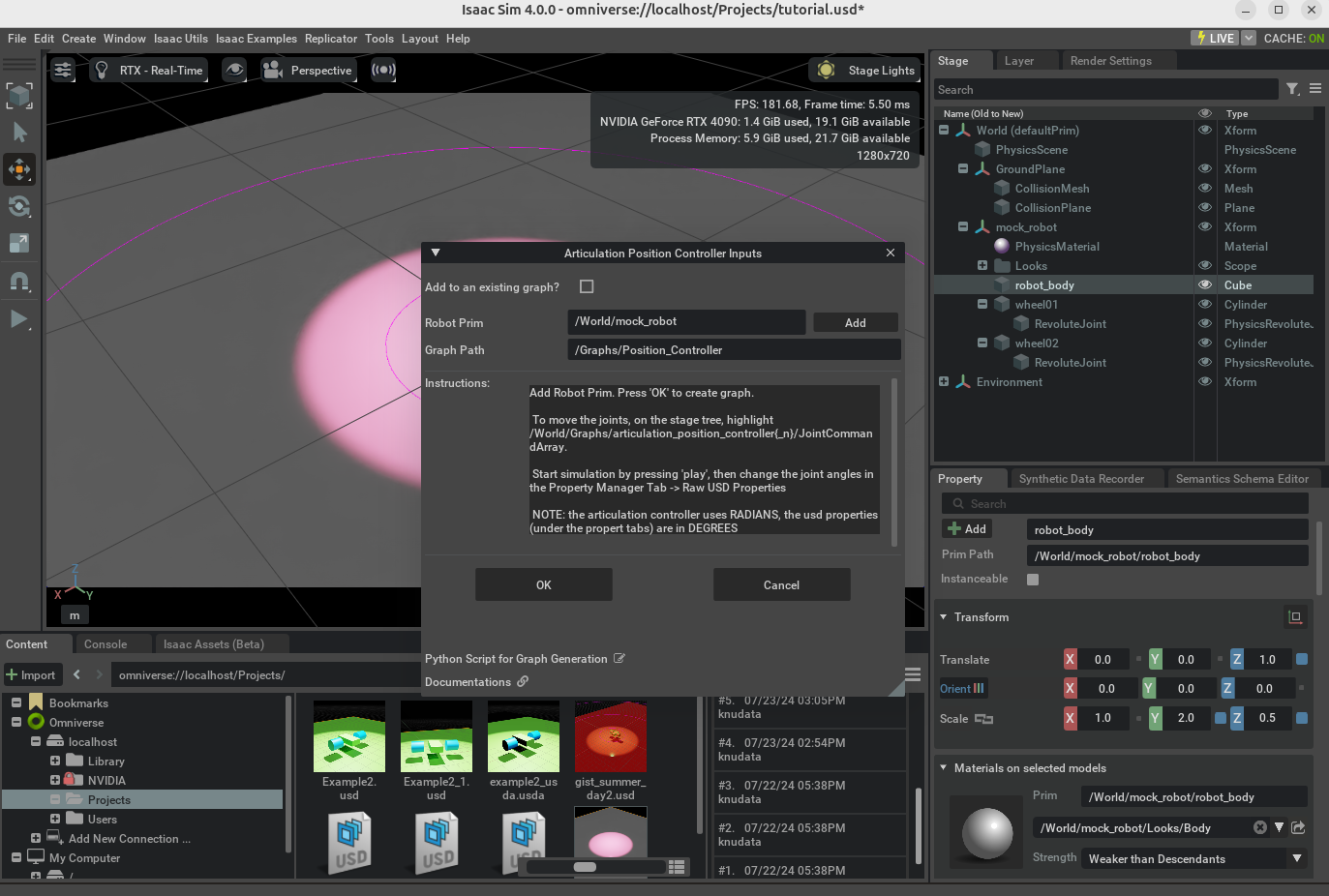
Isaac Utils -> Common Omnigraphs -> Articulation Velocity Control 클릭후 mock_robot을 넣어준다.
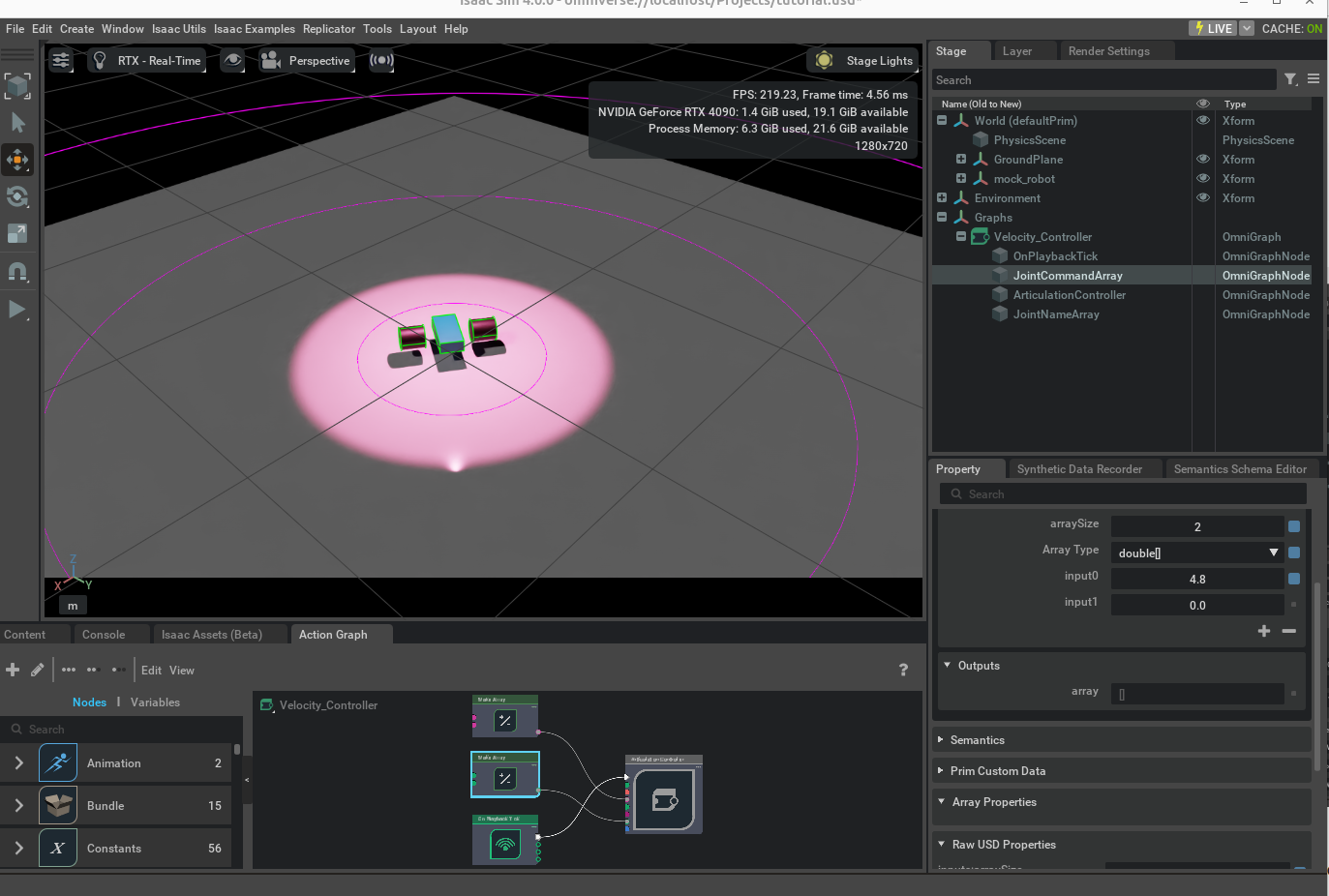
Graphs의 Velocity_Controller을 우클릭 후 eopn graph를 누르면 하단에 tab이 추가된다.
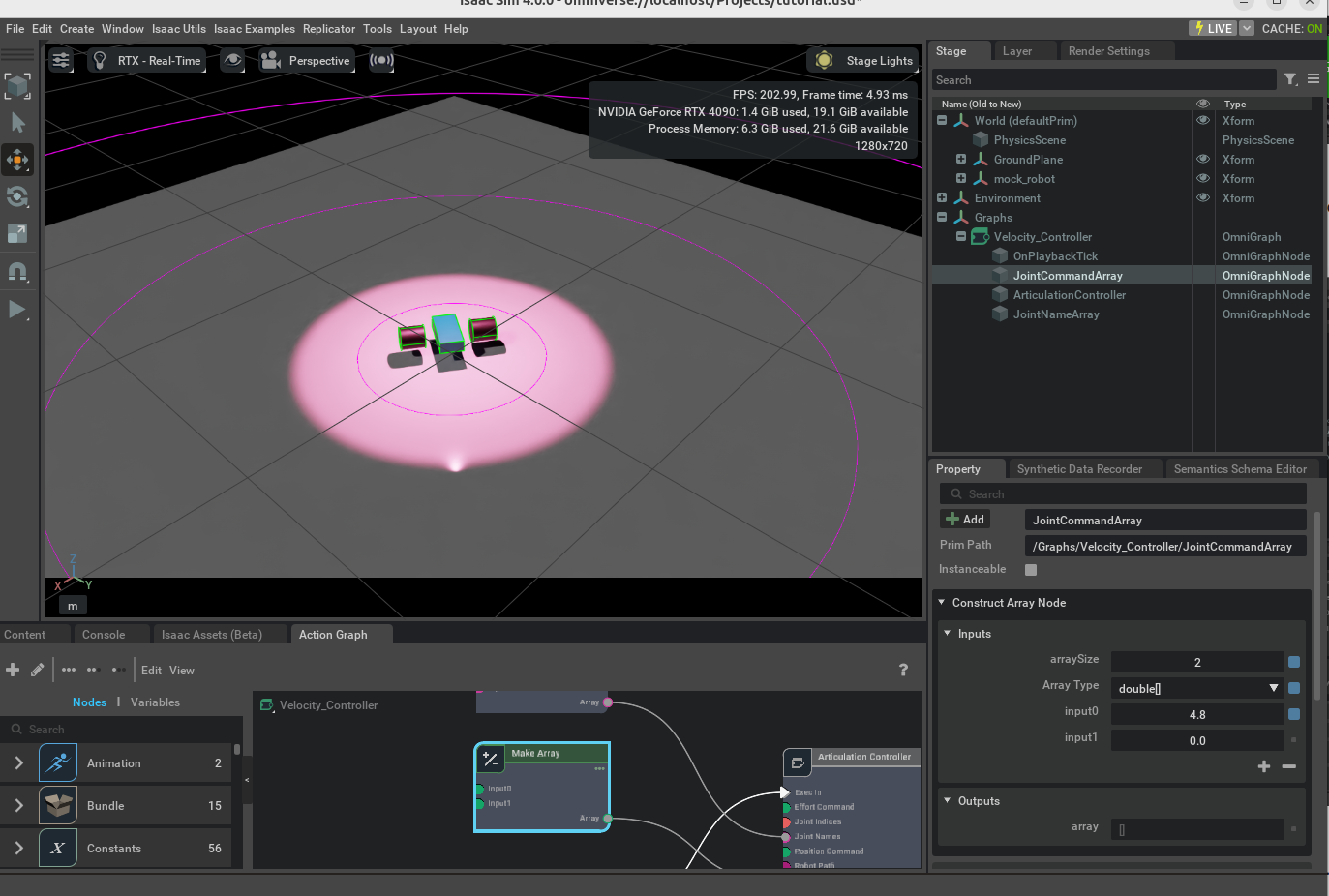
이후 두번째 make araay를 클릭 후 input 0과 input 1을 변경하면은 속도가 달라진다.

데이터사이언스정복