Isaac Sim Workflows
GUI
- 특징:가상 세계를 채우고 시뮬레이션하기 위한 시각적인 도구
- 사용 용도:세계 구축, 로봇 조립, 센서 부착, ROS
Extensions
- 특징:비동기적으로 실행되어 스테이지와의 상호작용이 가능하고, hot reloading을 통해 즉각적으 로 변화를 반영하여 실시간 시뮬레이션을 위한 물리 단계를 적용
- 사용 용도:사용자 정의 애플리케이션 모듈, 실시간 시뮬레이션 구축
Standalone Python
- 특징:물리 및 랜더링 단계에서 타이밍 제어가 가능
- 사용 용도:강화학습, 대규모 학습, 딥러닝 모델 적용
Writing a Custom Python Extension
 My Extensions라는 폴더를 만들어준다.
My Extensions라는 폴더를 만들어준다.
 Issac Utils -> Generate Extension Templates를 클릭
Issac Utils -> Generate Extension Templates를 클릭
 |  |
|---|
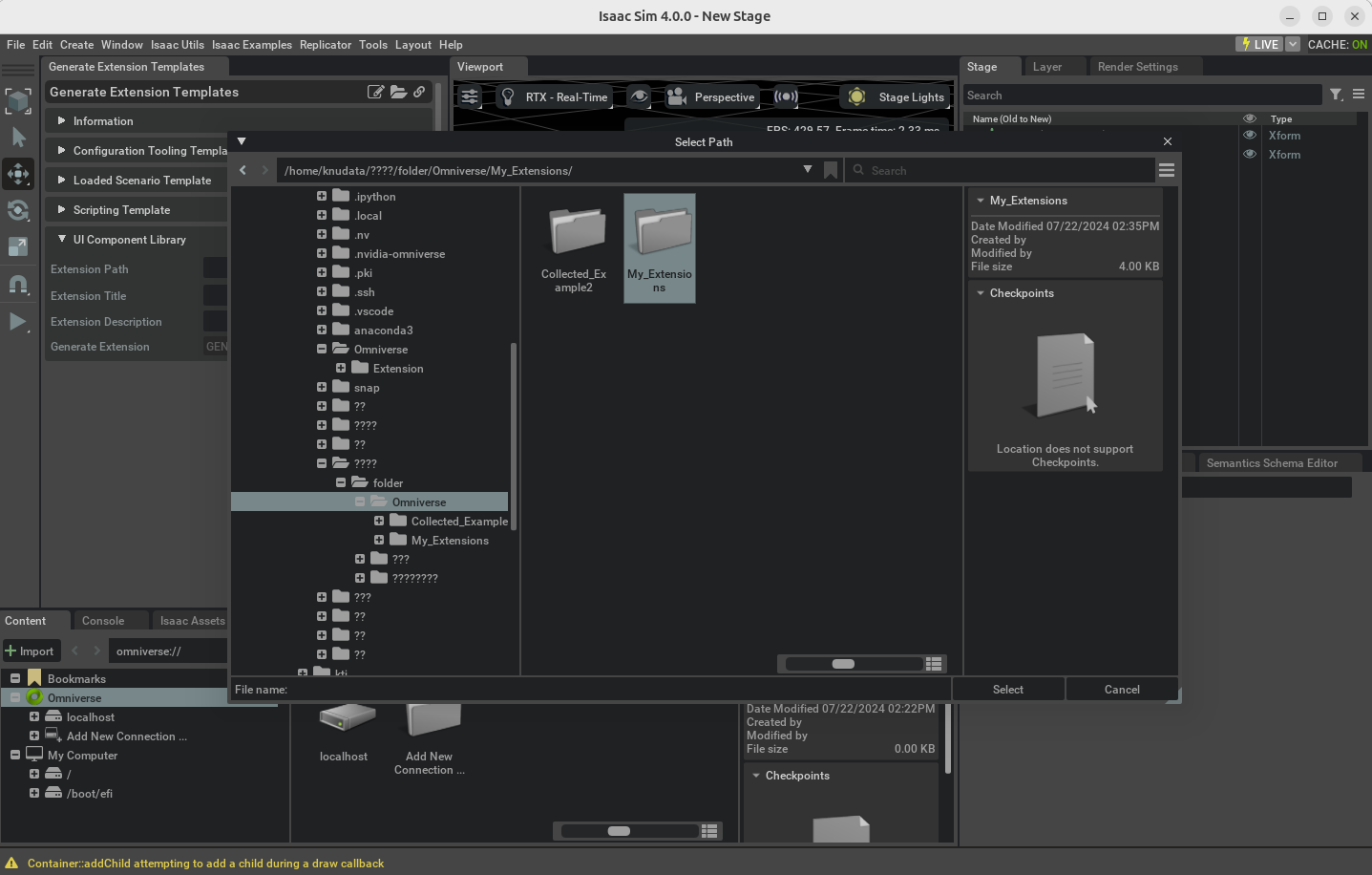
UI Component Library의 Extension Path을 누르고 만들어 두었던 폴더 경로를 설정하고 title도 설정해준다.
이때 file path 끝에 /가 있으면 Generate Extension이 안되니 주의

 해당 폴더로 가보면 파일이 만들어져있다.
해당 폴더로 가보면 파일이 만들어져있다.

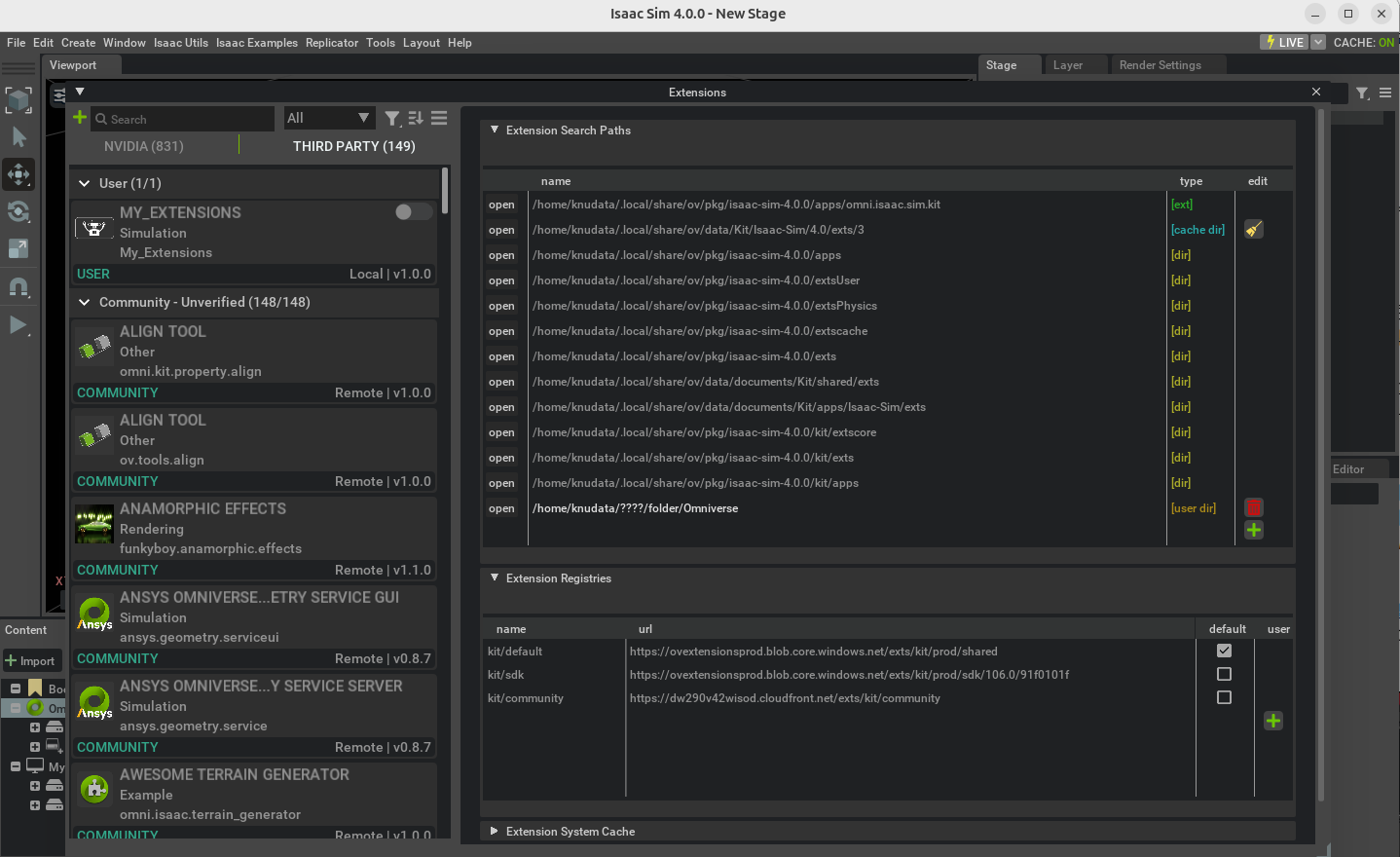
Windows -> Extension를 눌러줌

Extension 창 상단의 바 3개를 눌러 Settings에 들어간다.
이후 +버튼을 눌러 우리가 만들어 줬던 파일 경로를 적어주면 좌측에 MY EXTENSION이 뜬다.
 | 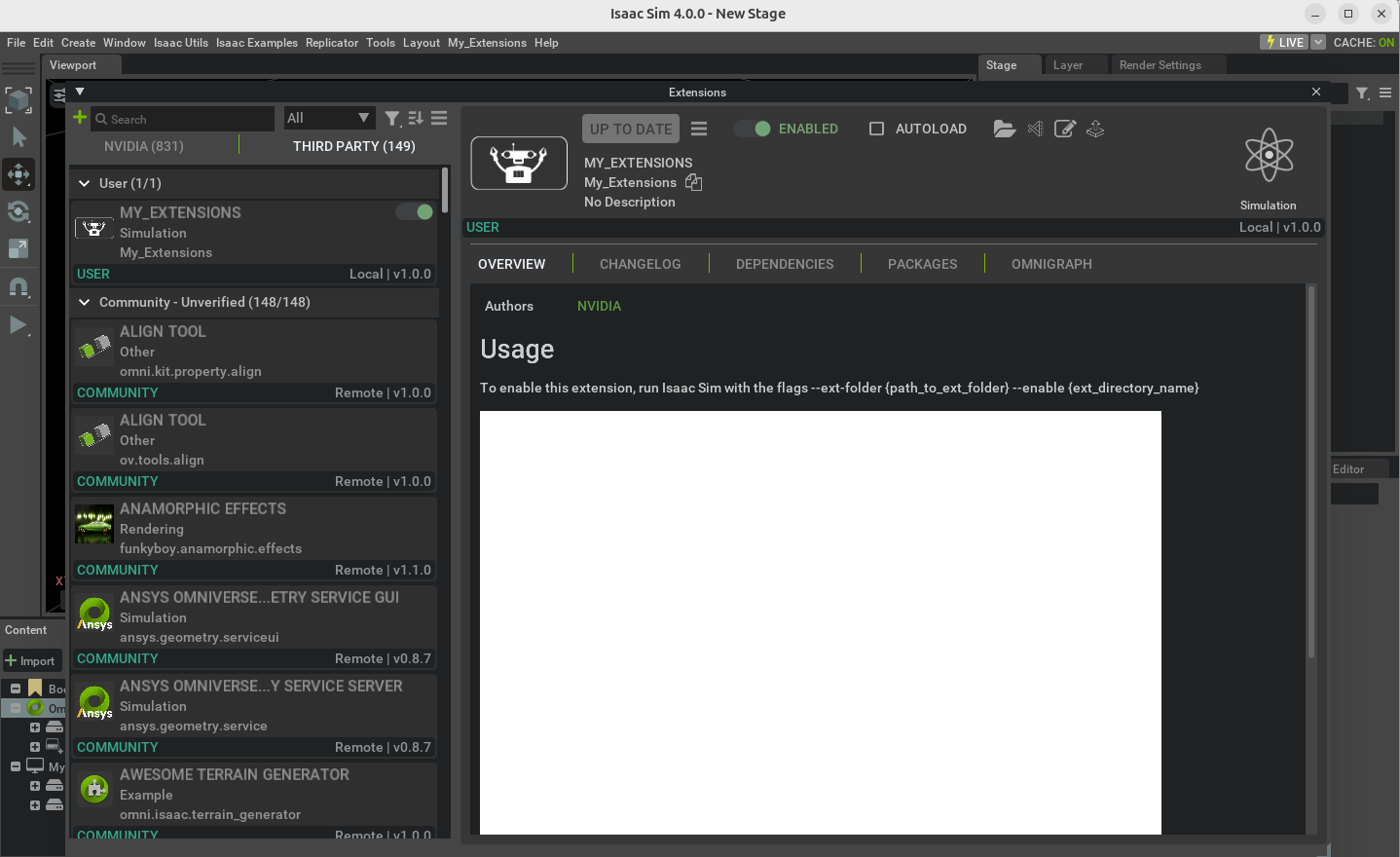 |
|---|
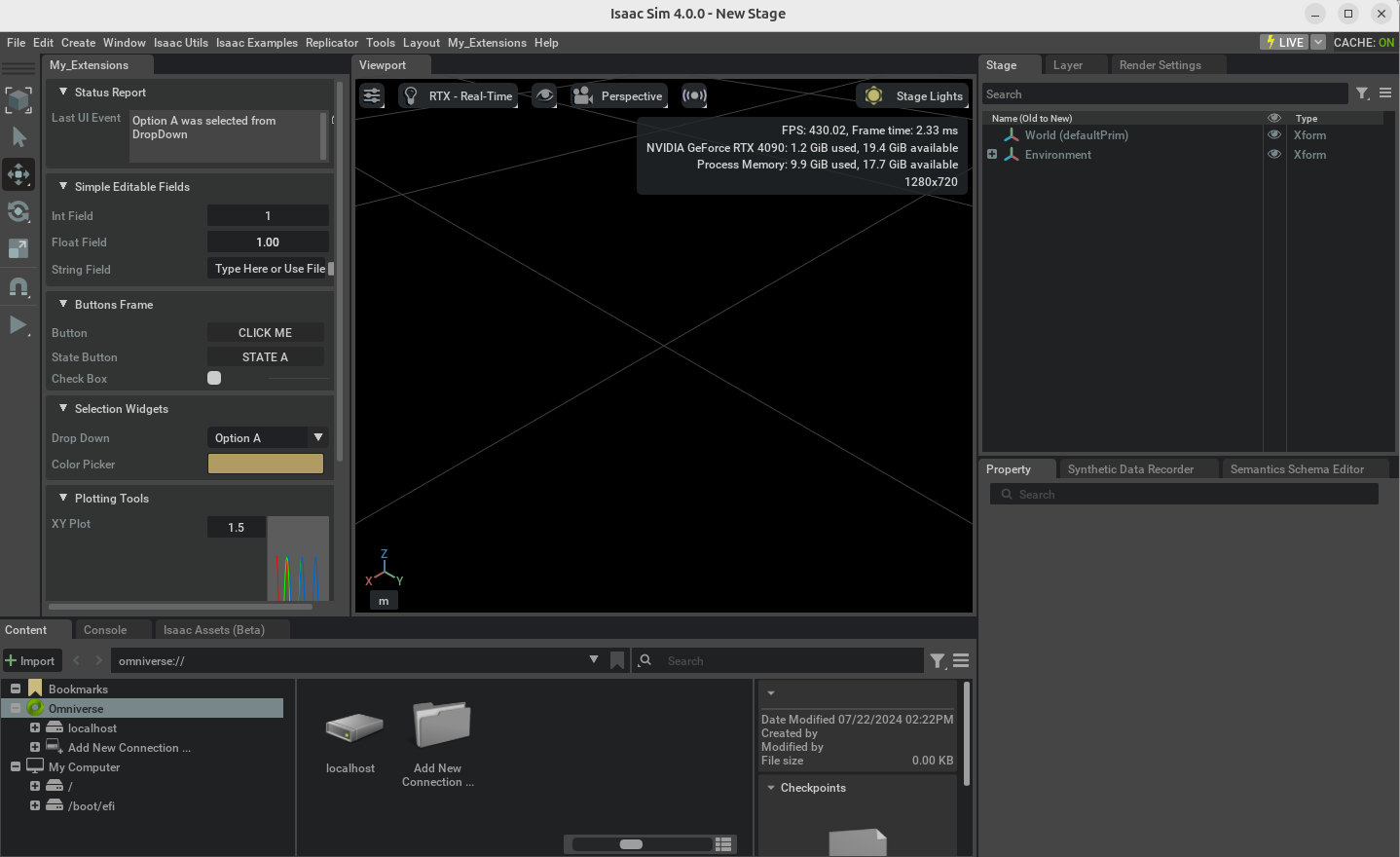
토글을 바꿔주고 AUTOLOAD도 체크표시한다.
그러면 상단에 MY EXTENSION bar가 생기고 창도 생긴다.
follow_target_with_rpmflow.py Run
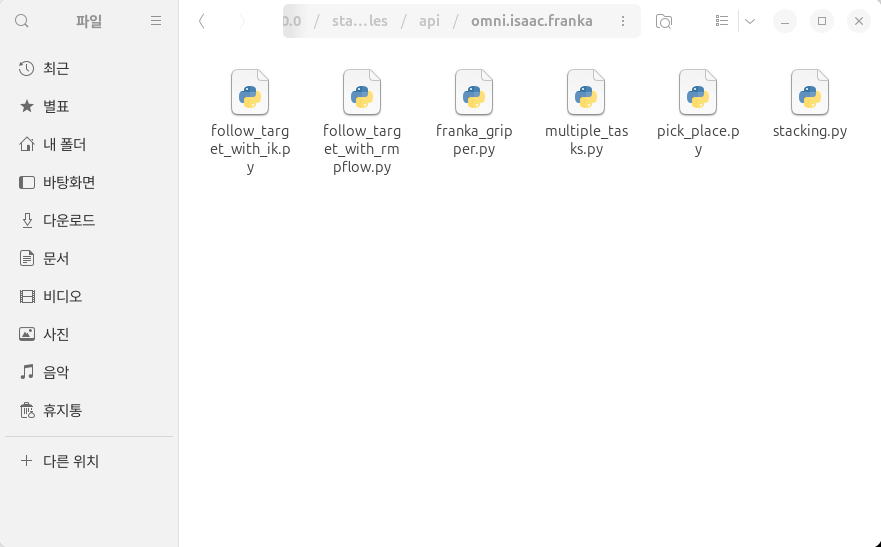
/home/knudata/.local/share/ov/pkg/isaac-sim-4.0.0/standalone_examples/api/omni.isaac.franka
해당 경로로 들어가면 예제 Python 파일이 존재한다.

./python.sh standalone_examples/api/omni.isaac.franka/follow_target_with_rmpflow.py
해당 경로에서 터미널을열고 코드를 입력해주면 실행이된다.
반드시 Target cube를 잡고 움직여야한다. 그렇지 않으면 강제종료됨

데이터사이언스정복