
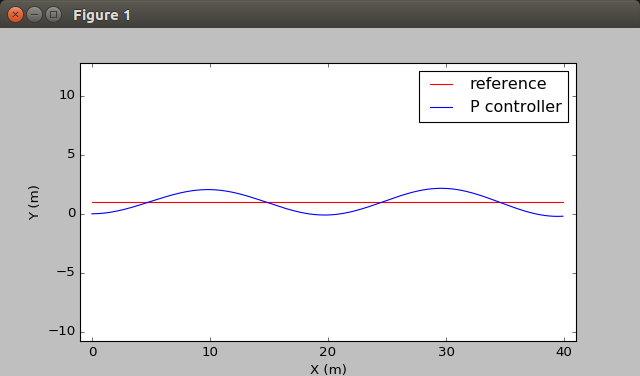
Ⅰ. P controller
-
Error 에 비례해서 control input 생성
-
But, Overshoot이 생김
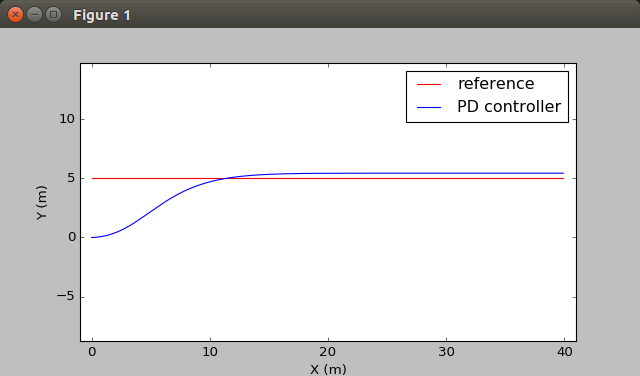
Ⅱ. PD controller
- error의 미분값을 고려
- Overshoot을 줄일 수 있음
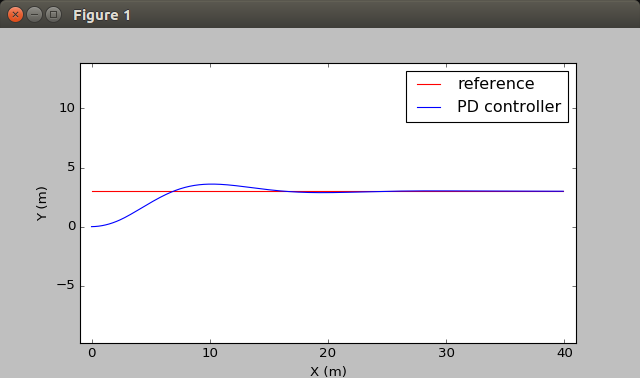
- But, system에 bias가 있는 경우 잡지 못함
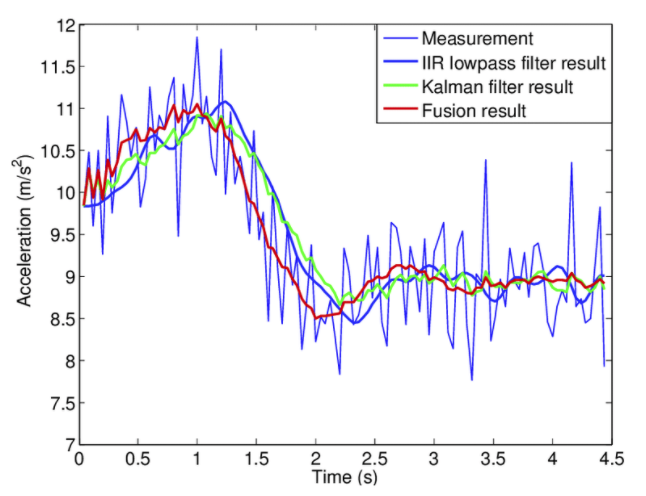
- 주의할 점으로 보통 측정값에는 노이즈가 끼기 때문에 state-estimator나 low-pass-filter를 사용하는 것이 좋음
Ⅲ. PID controller
- error의 누적값을 고려
- steady-state-error를 없앨 수 있음
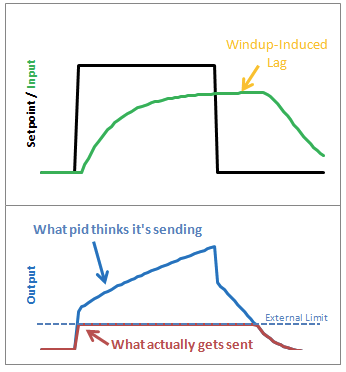
- 주의할 점으로 wind-up 문제가 있음
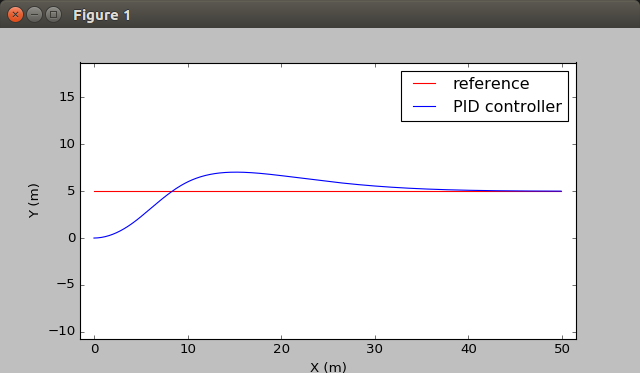
Ⅳ. 코드 예시
import numpy as np import matplotlib.pyplot as plt # paramters dt = 0.1 L = 3.0 class LateralPlant(object): def __init__(self, x=0.0, y=0.0, yaw=0.0, v=0.0): self.x = x self.y = y self.yaw = yaw self.v = v self.max_steering = np.radians(30) def update(self, steer, a=0): steer += np.radians(3) steer = np.clip(steer, -self.max_steering, self.max_steering) self.x += self.v * np.cos(self.yaw) * dt self.y += self.v * np.sin(self.yaw) * dt self.yaw += self.v / L * np.tan(steer) * dt self.yaw = self.yaw % (2.0 * np.pi) self.v += a * dt if __name__ == "__main__": plant = LateralPlant(x=0.0, y=0.0, yaw=0.0, v=1.0) target_y = 1.0 kp = 0.4 kd = 2.0 ki = 0.003 ys = [] ts = [] prev_error = plant.y - target_y int_error = 0.0 for step in range(500): t = step * dt error = plant.y - target_y diff_error = error - prev_error prev_error = error int_error += error steer = - kp * error - kd * diff_error/dt - ki * int_error plant.update(steer) ys.append(plant.y) ts.append(t) plt.figure() plt.plot([0, ts[-1]], [target_y, target_y], 'r-', label="reference") plt.plot(ts, ys, 'b-', label="PID controller") plt.xlabel('X (m)') plt.ylabel('Y (m)') plt.legend(loc="best") plt.axis("equal") plt.show()
