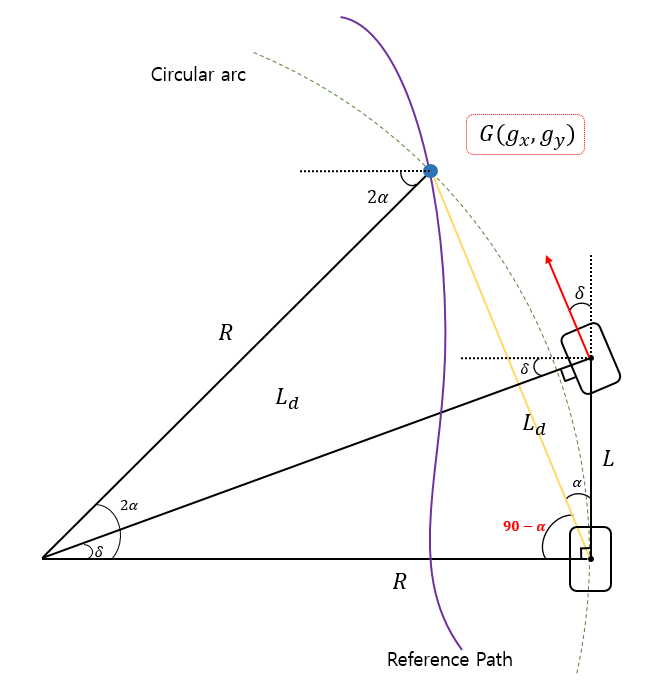
사인법칙에 의해서
따라서 steer angle δ\deltaδ 는
https://dingyan89.medium.com/three-methods-of-vehicle-lateral-control-pure-pursuit-stanley-and-mpc-db8cc1d32081
http://www.enseignement.polytechnique.fr/profs/informatique/Eric.Goubault/MRIS/coulter_r_craig_1992_1.pdf
https://www.researchgate.net/publication/312272304_Pure_Pursuit_Revisited_Field_Testing_of_Autonomous_Vehicles_in_Urban_Areas
https://www.ri.cmu.edu/pub_files/2009/2/Automatic_Steering_Methods_for_Autonomous_Automobile_Path_Tracking.pdf