Ⅰ. 기본 형식
<?xml version="1.0"?>
<robot name="my_robot">
<link> ... </link>
<link> ... </link>
<link> ... </link>
<joint> .... </joint>
<joint> .... </joint>
<joint> .... </joint>
</robot>Ⅱ. <link name="link_name">
1. 예시
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.01" radius="0.2"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.03" radius="0.2"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
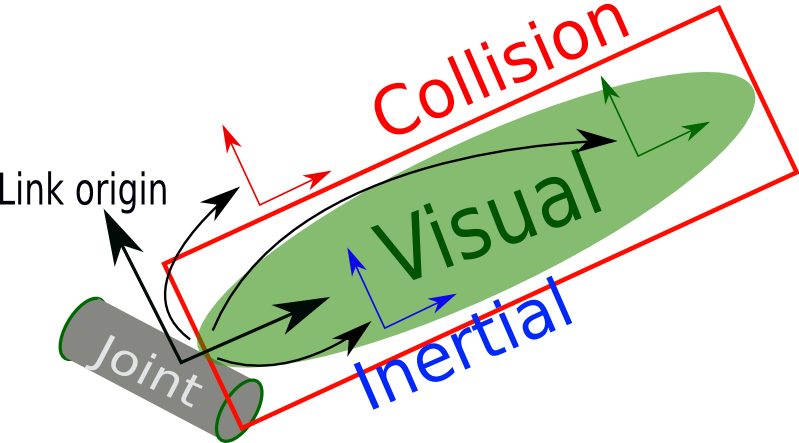
</link>2. <visual name="name">
시각적 형체를 정의
-
<origin xyz="0 0 0" rpy="0 0 0" />기준 프레임에 대한 visual element의 프레임을 정의 -
<geometry>: 모양을 정의<box size="1 1 1" />: 육각형 모양<cylinder length="1" radius="1" />: 원기둥 모양<sphere radius="1" />: 구 모양
-
<material name="material_name">: 렌더링을 정의<color rgba="1 1 1 1" />: 0~1 범위를 갖는 red/green/blue/alpha 의 값을 지정<texture filename="path" />: 텍스쳐 파일 지정
3. <collision name="name">
물리적 히트박스를 설정
-
<origin xyz="0 0 0" rpy="0 0 0" />기준 프레임에 대한 collision element의 프레임을 정의 -
<geometry>: 모양을 정의<box size="1 1 1" />: 육각형 모양<cylinder length="1" radius="1" />: 원기둥 모양<sphere radius="1" />: 구 모양
3. <inertial>
물리적 특성을 정의
-
<origin xyz="0 0 0" rpy="0 0 0" />기준 프레임에 대한 inertial element의 프레임을 정의 -
<mass value="1">: 질량을 설정 -
<inertia ixx= "1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>: 관성 모멘트를 설정
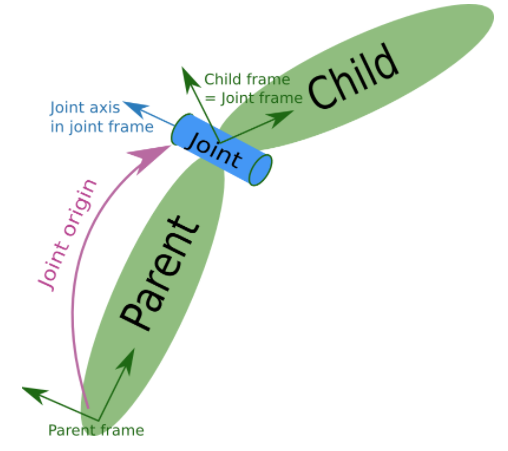
Ⅲ. <joint name="name" type="type">
1. 예시
<joint name="pan_joint" type="revolute">
<parent link="base_link"/>
<child link="pan_link"/>
<origin xyz="0 0 0.1"/>
<axis xyz="0 0 1" />
<limit effort="300" velocity="0.1" lower="-3.14" upper="3.14"/>
<dynamics damping="50" friction="1"/>
</joint>2. type
- revolute : 축을 중심으로 제한을 가지고 회전
- continuous : 축을 중심으로 제한 없이 회전
- fixed : 고정
- prismatic : 축방향으로 선형으로 이동
- planar : 축에 수직인 평면상에서 이동
- floating : 완전 자유 이동
3. <orgin>
<origin xyz="0 0 0" rpy="0 0 0" />부모링크의 프레임에 대한 자식링크의 프레임을 정의
4. <parent>
<parent link="base_link"/>: 부모링크 설정
5. <child>
<child link="pan_link"/>: 자식링크 설정
6. <axis>
<axis xyz="0 0 1" />: joint의 축 설정
7. <dynamics>
<dynamics damping="50" friction="1"/>: 물리적 특성 설정
8. <limit>
<limit effort="300" velocity="0.1" lower="-3.14" upper="3.14"/>: 제한 설정
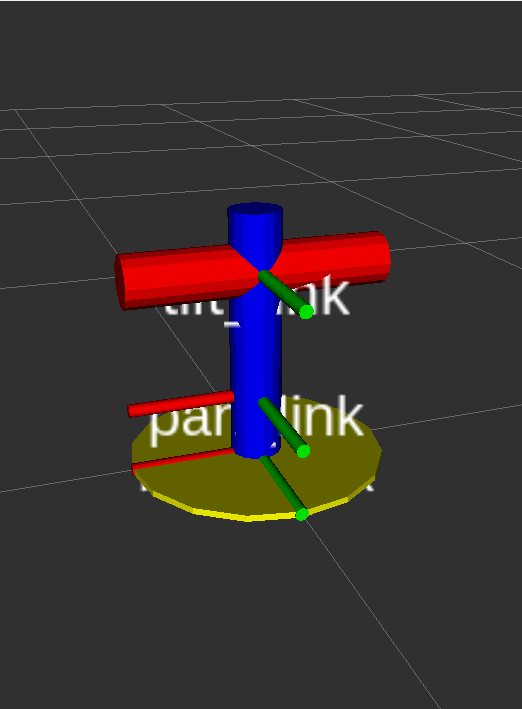
Ⅳ. 전체 예시
<?xml version="1.0"?>
<robot name="ex_urdf_pan_tilt">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.01" radius="0.2"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.03" radius="0.2"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx= "1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="pan_joint" type="revolute">
<parent link="base_link"/>
<child link="pan_link"/>
<origin xyz="0 0 0.1"/>
<axis xyz="0 0 1" />
<limit effort="300" velocity="0.1" lower="-3.14" upper="3.14"/>
<dynamics damping="50" friction="1"/>
</joint>
<link name="pan_link">
<visual>
<geometry>
<cylinder length="0.4" radius="0.04"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.09"/>
<material name="red">
<color rgba="0 0 1 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.4" radius="0.06"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.09"/>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="tilt_joint" type="revolute">
<parent link="pan_link"/>
<child link="tilt_link"/>
<origin xyz="0 0 0.2"/>
<axis xyz="0 1 0" />
<limit effort="300" velocity="0.1" lower="-4.71239" upper="-1.570796"/>
<dynamics damping="50" friction="1"/>
</joint>
<link name="tilt_link">
<visual>
<geometry>
<cylinder length="0.4" radius="0.04"/>
</geometry>
<origin rpy="0 1.570796 0" xyz="0 0 0"/>
<material name="green">
<color rgba="1 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.4" radius="0.06"/>
</geometry>
<origin rpy="0 1.570796 0" xyz="0 0 0"/>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
</robot>- RVIZ로 확인