#7. 근사 최근접 이웃 (ANN) 검색
ANN이란 질문 벡터(Query 벡터)에 대해 가장 비슷한 데티어(Nearest Neighbor)를 찾는 작업
정확도는 조금 낮아져도, 속도를 크게 높이는 것이 목표!!
VDB 검색 알고리즘
■ VDB
- 고차원 벡터 데이터를 저장
- 벡터 간의 유사성 검색을 효율적으로 수행하는 시스템
■ VDB 중요성
- 이미지 검색, 자연어 처리, 추천 시스템 등 대규모 벡터 데이터를 다루는 경우 검색 속도는 시스템의 성능과 사용자 경험에 매우 중요
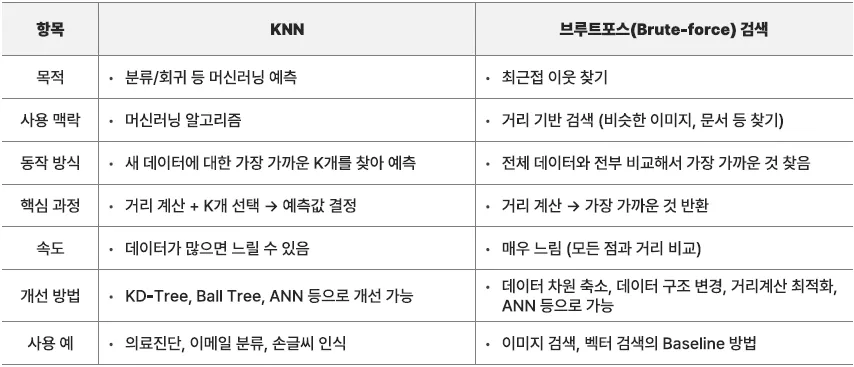
KNN (K-Nearest Neighbor) 알고리즘
정의
KNN(K-Nearest Neighbor, K-최근접 이웃) 알고리즘은 머신러닝과 검색 시스템에서 가장 기본적인 알고리즘 중 하나
【 KNN이란? 】
-
단순하지만 강력한 분류(Classification) 및 회귀(Regression) 알고리즘
-
새로운 데이터 포인트(예측할 데이터)가 들어오면,
- 주변에 있는 K개의 가장 가까운 데이터를 찾아서
- 다수결(분류) 또는 평균(회귀)을 통해 예측
-
비슷한 친구가 많으면 나도 그 부류에 속할 가능성이 높다는 개념
“비슷한 데이터는 비슷한 특성을 가진다”는 아이디어에서 출발
<장/단점>
| 장점 | 단점 |
|---|---|
| 이해하기 쉽고 구현이 간단 | 데이터가 많아질수록 속도가 느려짐 |
| 선형적(직선 형태) 관계가 아닌 복잡한 패턴도 잘 찾음 | 차원이 높아지면 거리 계산이 어려워짐 (고차원 문제) |
| 특정한 학습 과정이 필요 없음 (즉시 예측 가능) | 메모리 사용량이 큼 (모든 데이터를 저장해야 함) |
보통 K는 홀수로 설정하여 다수결 판별이 용이하도록 함.
주요 내용
-
브루트포스 검색(유사한 데이터 찾는 데 집중) 대비 KNN은 예측을 목표
-
KNN에서 거리 계산을 하기 위해 브루트포스, KD-Tree, Ball Tree, ANN(HNSW 등) 사용 가능
-
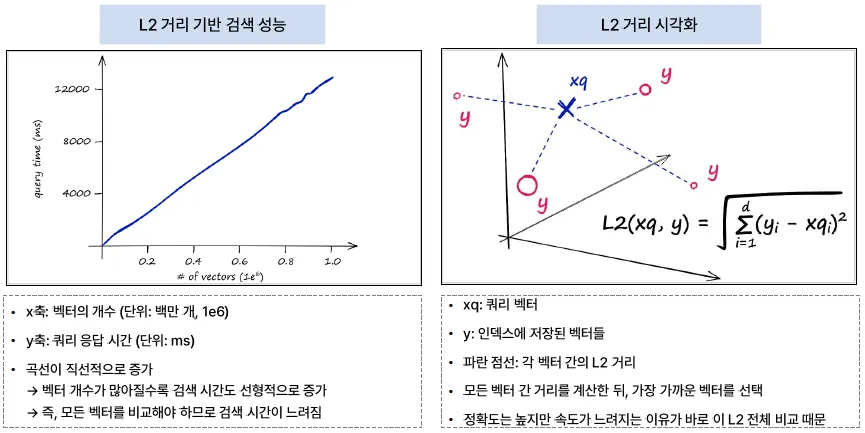
쿼리 벡터와 전체 벡터를 거리(L2, Cos 등)로 직접 비교하여 유사한 것 탐색
- 검색을 위한 쿼리 벡터 검색 시 모든 벡터와 직접 비교 (L2, Cos, Dot-product)
-
가장 정확한 검색 방법
-
데이터 개수가 많아지면 검색 시간이 데이터 개수에 따라 증가
KNN을 활용하여 간단한 분류
from sklearn.neighbors import KNeighborsClassifier
import numpy as np
# 간단한 데이터: [키(cm), 몸무게(kg)]
X = np.array([[180, 80], [160, 50], [170, 60], [155, 45], [190, 90]])
# 정답(라벨)
y = np.array(["남자", "여자", "남자", "여자", "남자"])
# KNN 모델 생성 (K=3)
knn = KNeighborsClassifier(n_neighbors=3)
knn.fit(X, y)
# 새로운 사람 [165cm, 55kg]이 남자인지 여자인지 예측
new_person = np.array([[165, 55]])
prediction = knn.predict(new_person)
print("예측 결과:", prediction) # 출력: ['여자']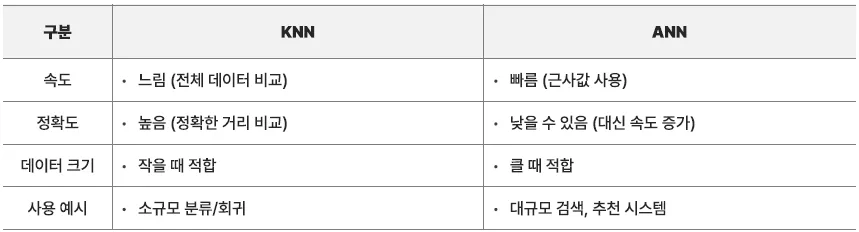
ANN은 근사값을 사용해서 속도를 빠르게 하는 KNN의 개선 버전
브루트포스 검색
가능한 모든 경우를 전부 탐색하여 해답을 찾는 방식
import numpy as np
from sklearn.metrics.pairwise import euclidean_distances
# 쿼리 벡터 (예: [3, 3])
query = np.array([[3, 3]])
# 데이터셋 (비교 대상 벡터들)
data = np.array([[1, 1], [2, 2], [5, 5], [6, 6]])
# 거리 계산
distances = euclidean_distances(query, data)
print("거리:", distances)
# 가장 가까운 2개 인덱스 추출
nearest_index = np.argsort(distances[0])[:2]
print("가장 가까운 2개:", data[nearest_index])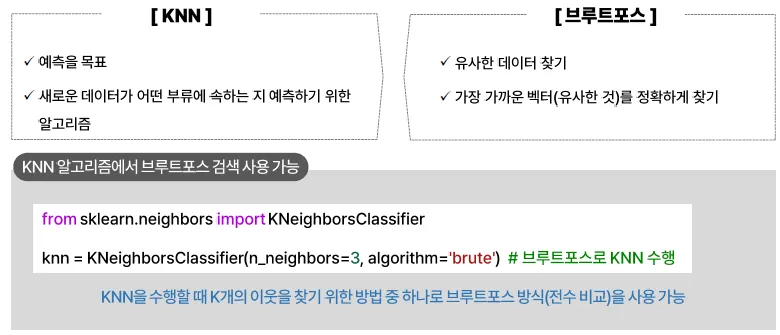
시간이 매우 오래 걸리므로 GPU를 사용하여 병렬처리함
브루트포스 검색 – Search on GPU (Flat: 브루트포스)
개요
-
모든 임베딩 벡터를 GPU의 VRAM에 업로드한 후 검색 수행
-
브루트포스 방식이지만 GPU를 사용하면 매우 빠른 응답 속도 제공
-
VRAM 용량에 따라 처리 가능한 벡터 수가 결정됨
◾ 단일 GPU 사용
res = faiss.StandardGpuResources() # GPU 자원 할당
index_flat = faiss.IndexFlatL2(d) # L2 거리 기반 Flat Index 생성
gpu_index_flat = faiss.index_cpu_to_gpu(res, 0, index_flat) # GPU로 인덱스 이동
gpu_index_flat.add(xb) # 임베딩 벡터 추가
D, I = index.search(xq, k) # 검색 수행◾ 멀티 GPU 사용
cpu_index = faiss.IndexFlatL2(d) # CPU 상의 인덱스 생성
gpu_index_flat = faiss.index_cpu_to_all_gpus(cpu_index) # 모든 GPU로 인덱스 복사
gpu_index_flat.add(xb) # 임베딩 벡터 추가
D, I = index.search(xq, k) # 검색 수행ANN 알고리즘
ANN 알고리즘 (Approximate Nearest Neighbor)
- 정의: 대규모 벡터 데이터셋에서 특정 벡터와 가장 유사한 벡터를 빠르게 찾기 위한 검색 기법
- 특징:
- KNN과 비교 시 정확도를 약간 희생하는 대신 검색 속도 향상
- 고차원 벡터 공간에서 근사값을 빠르게 계산해 유사한 결과 반환
주요 ANN 알고리즘
| 알고리즘 | 설명 |
|---|---|
| LSH (Locality Sensitive Hashing) | 해시 함수를 통해 유사한 벡터가 동일한 해시 버킷에 위치하도록 설계 |
| IVF (Inverted File Index) | 벡터를 클러스터로 나눈 후, 각 클러스터 내에서 세부 검색 수행 |
| PQ (Product Quantization) | 벡터를 여러 하위 벡터로 분할 후, 양자화하여 압축 검색 |
| HNSW (Hierarchical Navigable Small World) | 그래프 기반 알고리즘으로 고차원에서도 정확도와 검색 속도를 모두 확보 가능 |
LSH, Locality Sensitive Hashing
| 구분 | 내용 |
|---|---|
| 구조 | 해시테이블 기반 |
| 원리 | - 비슷한 데이터는 같은 해시 버킷에 들어가도록 설계 - 질의 벡터가 들어오면 같은 해시 버킷만 조회하여 전체 비교를 피함 |
| 장점 | - 계산 속도가 빠름 |
| 단점 | - 차원이 높아질수록 성능 저하 발생 - 정확도는 다소 낮은 편 |
| 사용 예시 | 텍스트 유사도 검색, 대규모 로그 데이터 분석 |
LSH의 구조
| 구성 요소 | 설명 |
|---|---|
| Keys | 입력 벡터들 (예: 문서 임베딩, 이미지 벡터 등) |
| Hashing Function | 각 벡터에 해시 함수를 적용하여 특정 해시 값으로 변환 |
| Hash Buckets | 해시 값이 같은 벡터들은 동일한 버킷에 저장됨 → 유사한 벡터들이 같은 버킷에 위치하도록 해시 함수 설계 |
| Values (우측) | 각 버킷 내 값들만 대상으로 최근접 탐색 (Nearest Neighbor Search) 수행 |
LSH의 장점
-
전체 벡터를 비교하지 않아 속도가 빠름
-
해시 버킷을 기준으로 검색 대상이 자동으로 줄어듦
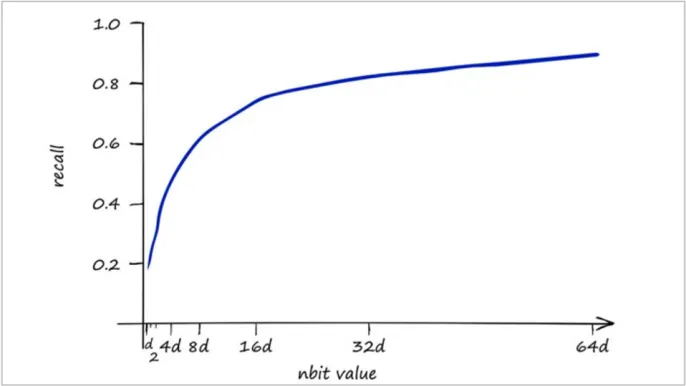
해시 비트 수(nbit) vs Recall
| 항목 | 설명 |
|---|---|
| nbit | 해싱 비트 수 (해시 표현의 정밀도, x축) |
| recall | 검색 정확도 (실제 가장 유사한 벡터를 잘 찾았는지, y축) |
관계 및 특징
-
nbit가 작을수록: recall이 낮아짐 (정확도 떨어짐)
-
nbit가 커질수록: recall이 높아짐 (정확도 향상)
-
그러나 32bit ~ 64bit 이상부터는 성능 향상이 둔화
- 일정 수준 이상에서는 정확도 증가가 미미함
즉, 성능 향상은 있으나 한계가 존재함
IVF, Inverted File Index
| 구분 | 내용 |
|---|---|
| 구조 | 데이터 클러스터링 기반 (예: K-means) |
| 사용 예시 | 영상 검색, 문서 검색, 이미지 인식 |
| 원리 | - 전체 벡터 데이터를 여러 개 클러스터로 나눔 - 쿼리 벡터가 속할 가능성이 높은 몇 개의 클러스터만 탐색 - 각 클러스터는 중심점(centroid)을 대표 벡터로 사용 - 쿼리 벡터와 중심점 간 거리 비교 후 유사한 클러스터 선택 - 선택된 클러스터 내부에서만 KNN 검색 수행 |
| 장점 | - 빠른 검색 속도 (탐색 범위 축소) - 효율적인 메모리 관리 (인덱스 구축 시간 및 메모리 사용량 증가 가능성 있음) |
| 단점 | - 정확도는 클러스터 품질에 의존 - 탐색할 클러스터 수(nprobe)가 많을수록 정확도는 향상되나 검색 속도는 저하됨 |
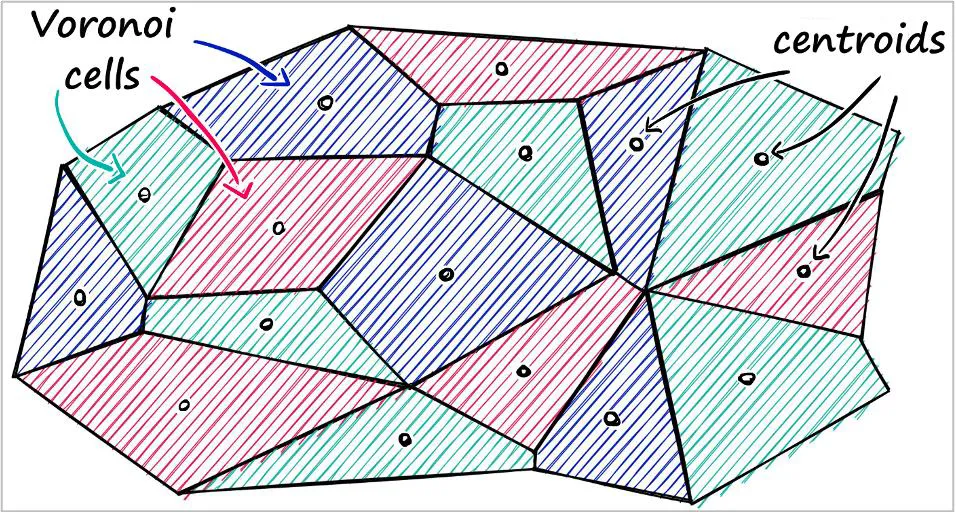
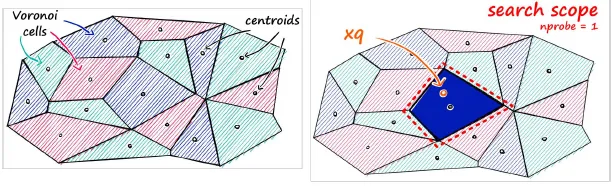
Voronoi Cell 기반 분할 (IVF 구조)
| 항목 | 설명 |
|---|---|
| 기본 원리 | 전체 벡터 공간을 K-means 알고리즘으로 분할하여 Voronoi Cell(보로노이 셀) 생성 |
| 구조 | 각 셀은 centroid(중심점)를 기준으로 가장 가까운 벡터들이 모여 있음 |
| 탐색 방식 | 검색 시, 먼저 쿼리 벡터와 가장 가까운 centroid를 찾고 → 해당 셀 내부에서만 탐색 수행 |
IVF의 핵심은 검색 범위를 셀 단위로 줄여 속도를 향상시키는 것이며, 클러스터링 기반의 효율적인 인덱싱 구조
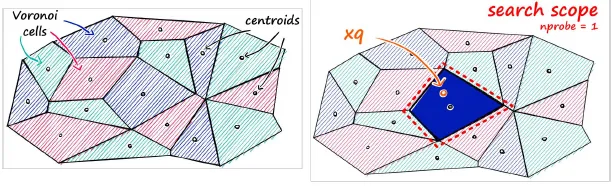
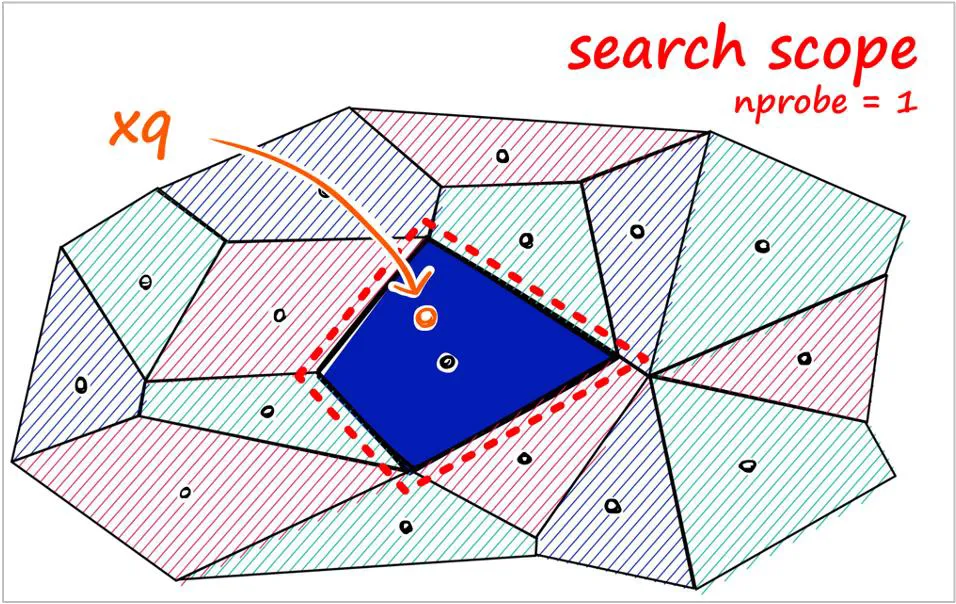
nprobe = 1일 때 (IVF 탐색 설정)
| 항목 | 설명 |
|---|---|
| 탐색 범위 | 쿼리 벡터 xq는 가장 가까운 하나의 셀만 탐색 (예: 파란 셀 영역) |
| 장점 | 탐색 속도가 매우 빠름 |
| 단점 | - 정확도가 낮아질 수 있음 |
| - 근처에 유사한 벡터가 있어도 다른 셀에 있다면 탐색되지 않을 수 있음 |
nprobe=1은 속도 우선 전략이며, 정확도는 희생될 수 있음
nprobe = 8일 때 (IVF 탐색 설정)
| 항목 | 설명 |
|---|---|
| 탐색 범위 | 쿼리 벡터 xq 주변의 8개 셀을 함께 탐색 |
| 정확도 | Recall(정확도) 향상됨 → 유사 벡터를 찾을 확률 증가 |
| 속도 | 연산량이 많아져 속도는 느려짐 |
| 추가 특징 | nprobe 값이 클수록 더 넓은 영역을 커버함 |
nprobe=8은 정확도 우선 전략으로, 속도를 일부 희생하더라도 유사 벡터를 더 놓치지 않고 찾기 위함
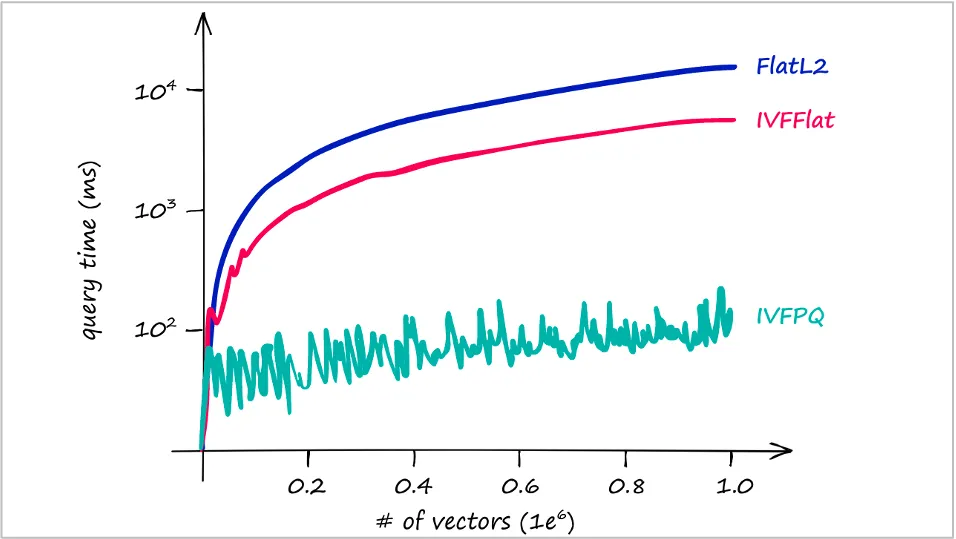
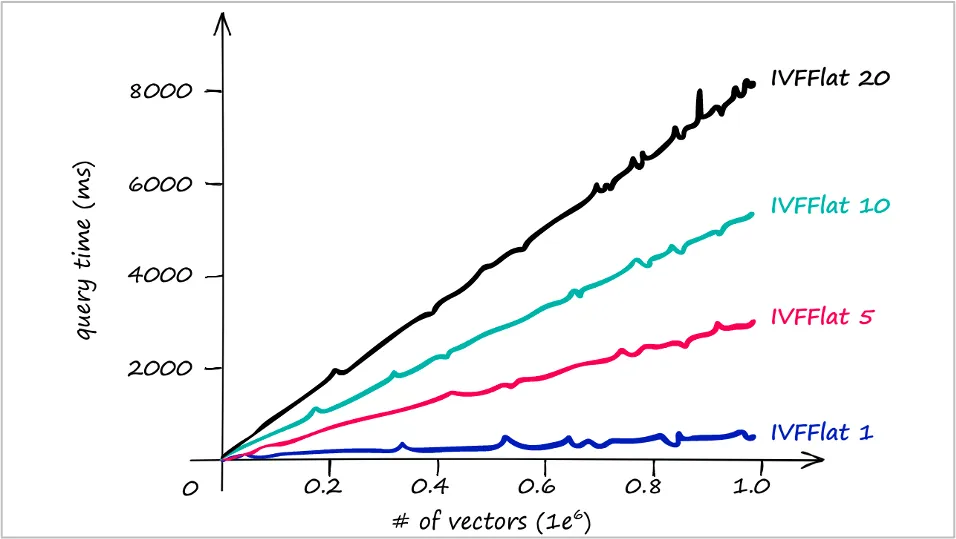
IVF 성능 그래프 해석
| 항목 | 설명 |
|---|---|
| x축 | 벡터 수 (단위: 1e6 = 백만 개) |
| y축 | 쿼리 소요 시간 (단위: ms) |
| 탐색 셀 수 변화 | 탐색하는 셀 수에 따라 성능이 달라짐 |
IVFflat 1: 빠르지만 정확도 낮음IVFflat 20: 느리지만 정확도 높음
속도 vs 정확도 트레이드오프 존재
IVF 관련 주요 용어 정리
| 용어 | 설명 |
|---|---|
| IVF (Inverted File Index) | - 벡터를 K개의 클러스터로 나눈 뒤, 일부 클러스터만 검색 - 검색 시 탐색할 클러스터 수 지정 |
| nprobe | - 탐색할 클러스터 수- nprobe = 1: 빠르지만 정확도 낮음- nprobe ↑: 느려지지만 정확도 상승- 적절한 nprobe 선택은 속도/정확도 균형 조절의 핵심 |
| centroid | 각 클러스터의 중심점 |
| Voronoi cell | 중심점 기준으로 벡터가 소속되는 영역 |
| IVFflat | IVF 구조에서 각 클러스터 내부를 Flat(정확히) 방식으로 검색 |
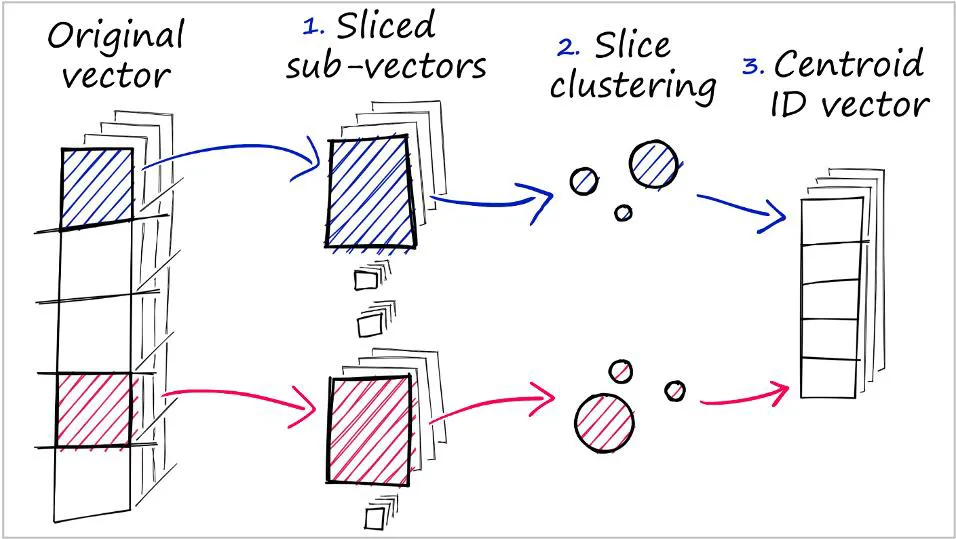
PQ
| 구분 | 내용 |
|---|---|
| 구조 | 압축 기반 인코딩 |
| 원리 | - 벡터를 여러 블록으로 나누고, 각 블록을 압축 코드북(codebook)으로 표현 - 예: 128차원 벡터 → 8개 블록 → 각 블록을 코드북에서 대표값으로 대체 - 보통 K-means를 활용해 각 블록별 코드북 생성- 고차원 벡터 → 저차원 서브벡터로 분할 → 각 서브벡터를 양자화하여 저장 |
| 장점 | - 대용량 벡터 처리에 적합- 메모리 절약 + 거리 계산 속도 향상 |
| 단점 | - 약간의 정확도 손실 발생 가능 - 설정 및 튜닝 필요 (코드북 수, 블록 수 등) |
| 활용 | 각 서브벡터는 코드북 인덱스로 표현되며, IVF와 함께 사용 가능 (IVFPQ 등) |
인덱스 방식별 비교
| 인덱스 방식 | 설명 | 특징 |
|---|---|---|
| FlatL2 | 모든 벡터를 정확히 비교 | 느리지만 정확도 높음 |
| IVFFlat | IVF 구조 기반, 선택된 셀만 정밀 비교 | 빠르고, 정확도는 중간 수준 |
| IVFPQ | IVF + PQ 압축 구조 | 가장 빠름, 정확도는 약간 손실 가능 |
요약 포인트
-
IVFPQ: 벡터 수가 많아져도 시간 증가 거의 없음 → 대규모 데이터에 적합
-
FlatL2: 가장 정확하지만, 데이터 많을수록 기하급수적으로 느려짐
-
IVFFlat: 속도·정확도 균형 잡힌 선택지
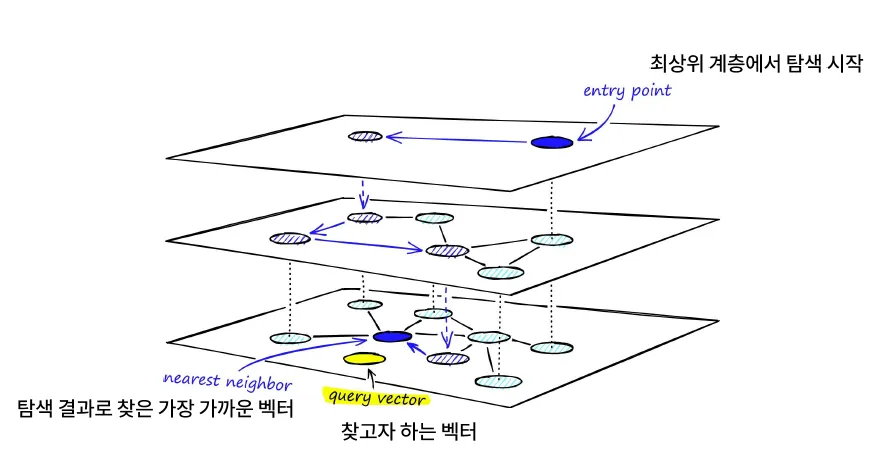
HNSW
HNSW 정리
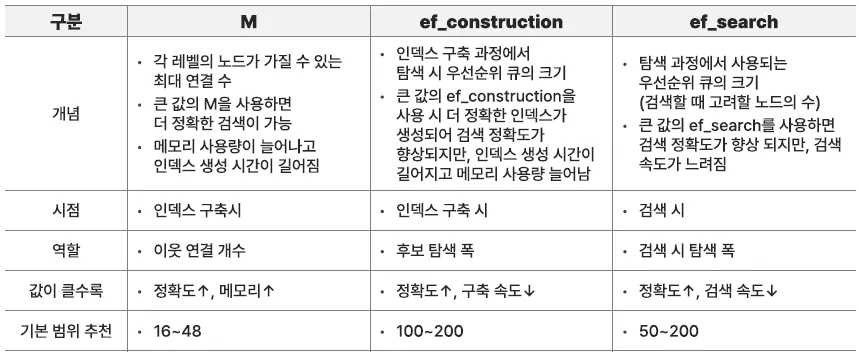
| 항목 | 설명 |
|---|---|
| 구조 | 계층적 그래프 기반 |
| 사용 예시 | 벡터 검색, 추천 시스템, 문서 검색 등 |
<원리>
-
데이터 포인트를 노드로 간주, 이들 간 근접성 기반 그래프 구성
-
계층 구조로 구성되며, 상위 레벨일수록 노드 수는 적고 연결은 추상적
-
검색은 최상위 레벨부터 시작, 점점 하위 레벨로 내려가며 이웃 노드를 탐색
-
각 단계에서 가장 가까운 노드로 이동하면서 목표 벡터에 점차적으로 접근
<장점>
-
정확도 매우 높음 (95~99%)
-
속도도 빠름
<단점>
-
메모리 사용량 큼
-
구조 구축 시간 오래 걸리고 구현 복잡도 높음
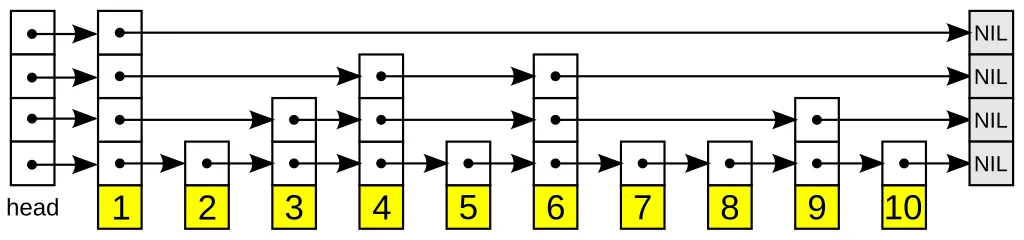
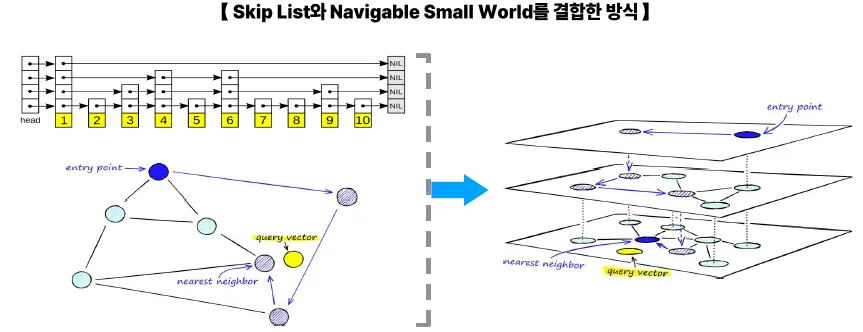
Skip List: 일종의 계층형 연결 리스트
개념
-
기본 연결 리스트는 노드를 순서대로 연결
-
Skip List는 "건너뛸 수 있는 고속도로" 개념
→ 상위 레벨 링크를 추가하여 일부 노드를 건너뛰며 탐색 속도 향상
구조
- Balanced Tree와 Linked List의 장점을 결합한 자료 구조
탐색 흐름
-
최상위 레벨에서 시작
-
다음 노드의 키와 검색하려는 값 비교
- 다음 키가 작으면 오른쪽으로 이동
- 다음 키가 크면 하위 레벨로 이동
-
가장 하위 레벨에 도달할 때까지 반복
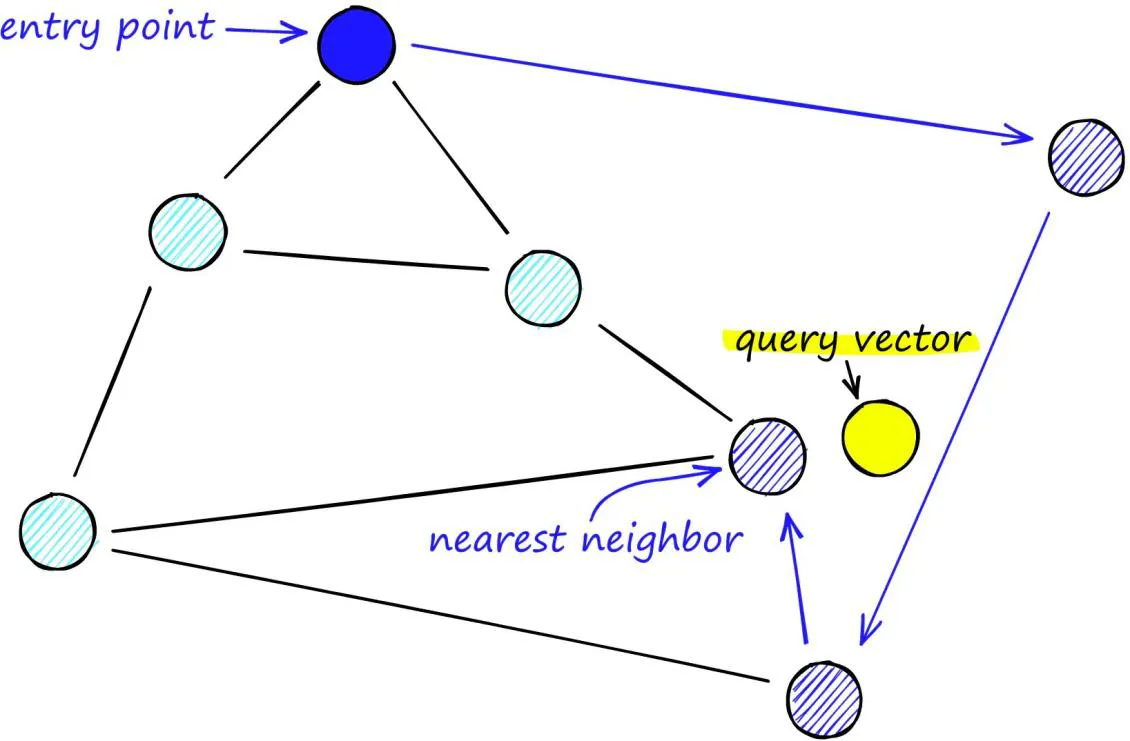
Navigable Small World (NSW)
개념
-
네트워크 구조에서 효율적인 검색과 탐색을 가능하게 하는 데이터 구조 및 알고리즘 개념
-
전체 노드가 넓게 퍼져 있어도, 몇 번의 연결만으로 거의 모든 노드에 도달할 수 있음
-
각 노드는 k개의 이웃 노드와 연결되어 있으며,
- long-range 연결과 short-range 연결을 조합하여 구성됨
-
가까운 노드만 따라가도 목표 노드에 도달 가능
예시
- SNS(소셜 네트워크)
- “세상은 좁다”는 말처럼 대부분의 사람은 6단계 이내로 연결됨 ("6 degrees of separation")
탐색 흐름
-
쿼리 벡터가 입력되면
-
상위 레벨에서 출발 (멀리 있는 친구들부터 시작)
-
가까운 노드를 따라 이동
- 점점 정확히 위치를 좁혀가며
- 최종적으로 목표에 가까운 노드에 도달
- 위 과정을 목표 도달 시까지 반복
NHSW는 Skip List에서 아이디어를 얻었지만, 훨씬 더 강력한 그래프 탐색 구조로 발전했다.
import nmslib
index = nmslib.init(method='hnsw', space='cosinesimil')
# 데이터 추가
index.addDataPointBatch(data)
# HNSW 파라미터 설정
index.createIndex({
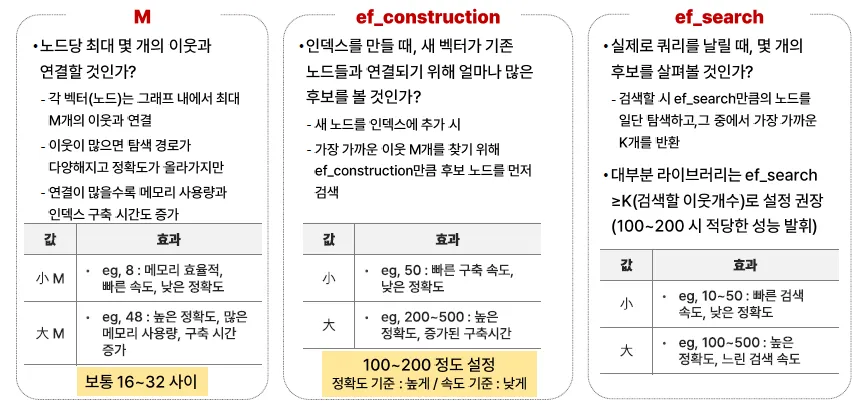
'M': 32,
'efConstruction': 200
}, print_progress=True)
# ef_search 설정
index.setQueryTimeParams({
'efSearch': 100
})| 상황 | 추천 설정 |
|---|---|
| 정확도 중요 시 | - M = 48- ef_construction = 300- ef_search = 200 ~ 500 |
| 속도 중요 시 (실시간) | - M = 16- ef_construction = 100- ef_search = 50 ~ 100 |
| 중간 수준 | - M = 32- ef_construction = 200- ef_search = 100 ~ 150 |
ANN 알고리즘 평가지표
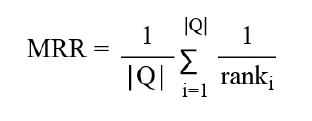
MRR, Mean Reciprocal Rank
정답(정답 벡터, relevant item)이 검색 결과 중 몇 번째에 나오는지를 평가하는 지표**
■ 개념 요약
-
“내가 찾고자 했던 진짜 이웃(정답 벡터)이 결과 몇 번째에 있었나?”를 확인
-
각 쿼리의 가장 먼저 등장하는 정답 문서의 순위의 역수를 계산하여 평균
-
값이 1에 가까울수록 상위에 정답이 위치함
-
하나의 쿼리에 복수 정답이 있어도 첫 번째 정답만 고려
■ 계산 방식
-
*각 쿼리(query)에 대해 정답의 순위(rank)**를 기록
-
해당 순위의 역수 (1 / rank)를 계산
-
전체 쿼리에 대해 평균
■ 예시
-
쿼리 1: 정답이 1등 → 1/1 = 1.0
-
쿼리 2: 정답이 3등 → 1/3 ≈ 0.333
-
MRR = (1.0 + 0.333) / 2 = 0.666
ANN 알고리즘 MRR 평가 흐름
-
Ground Truth 생성
- 브루트포스 방식으로 정확한 KNN 결과를 미리 계산하여 기준값 생성
-
ANN 결과 도출
- HNSW, IVF, PQ 등 다양한 ANN 방식으로 검색 결과 생성
-
정답 순위 확인
- 각 쿼리에 대해 정답이 검색 결과에서 몇 번째에 위치했는지 확인
-
MRR 계산
- 정답의 순위에 대한 역수 평균을 통해 ANN 알고리즘의 성능 평가
def compute_mrr(results, ground_truth):
"""
results: List[List[int]] -> 쿼리별 검색 결과 (예: [[2, 5, 8], [1, 3, 4]])
ground_truth: List[int] -> 각 쿼리의 정답 인덱스
"""
total_reciprocal = 0
for i, res in enumerate(results):
if ground_truth[i] in res:
rank = res.index(ground_truth[i]) + 1 # 0-based -> 1-based
total_reciprocal += 1 / rank
else:
total_reciprocal += 0
return total_reciprocal / len(results)
# 예시
results = [[2, 5, 3], [1, 4, 0], [8, 6, 7]]
ground_truth = [5, 1, 6]
mrr = compute_mrr(results, ground_truth)
print(f"MRR: {mrr:.4f}")