Chapter 5 Pose Detection
Pose Estimation

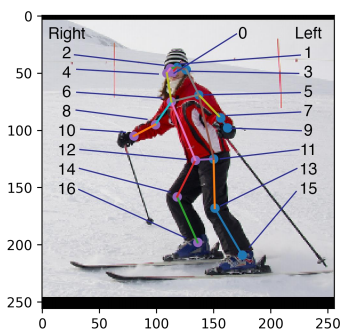
- YOLOv8에서는 총 17개의 Keypoint를 활용해서 동작 감지
from ultralytics import YOLO
model = YOLO('yolov8n-pose.pt')
results = model('https://ultralytics.com/images/bus.jpg', save=True)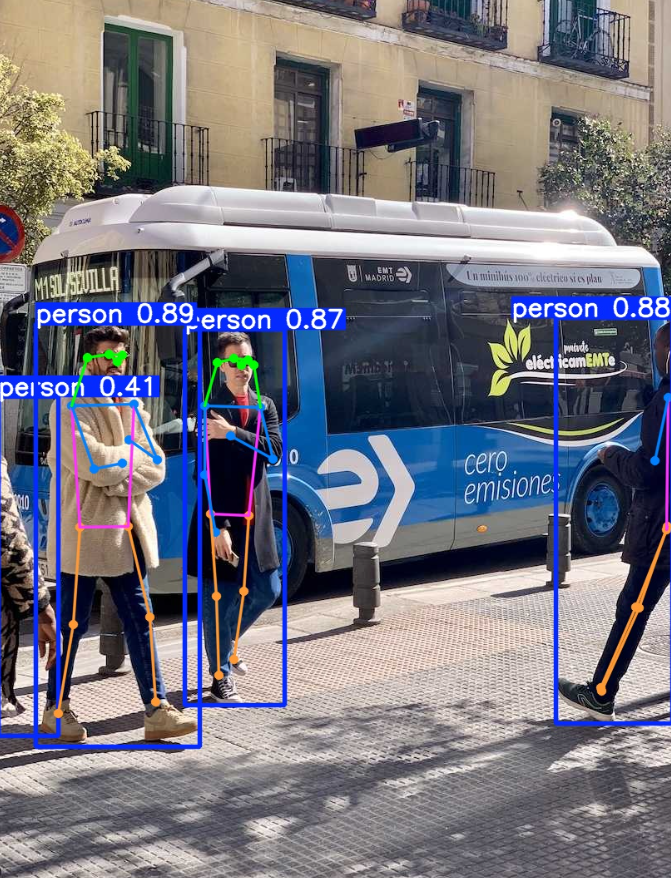
from ultralytics import YOLO
model = YOLO('yolov8n-pose.yaml')
result = model.train(data='coco8-pose.yaml', epochs= 100, imgsz=640, device=0)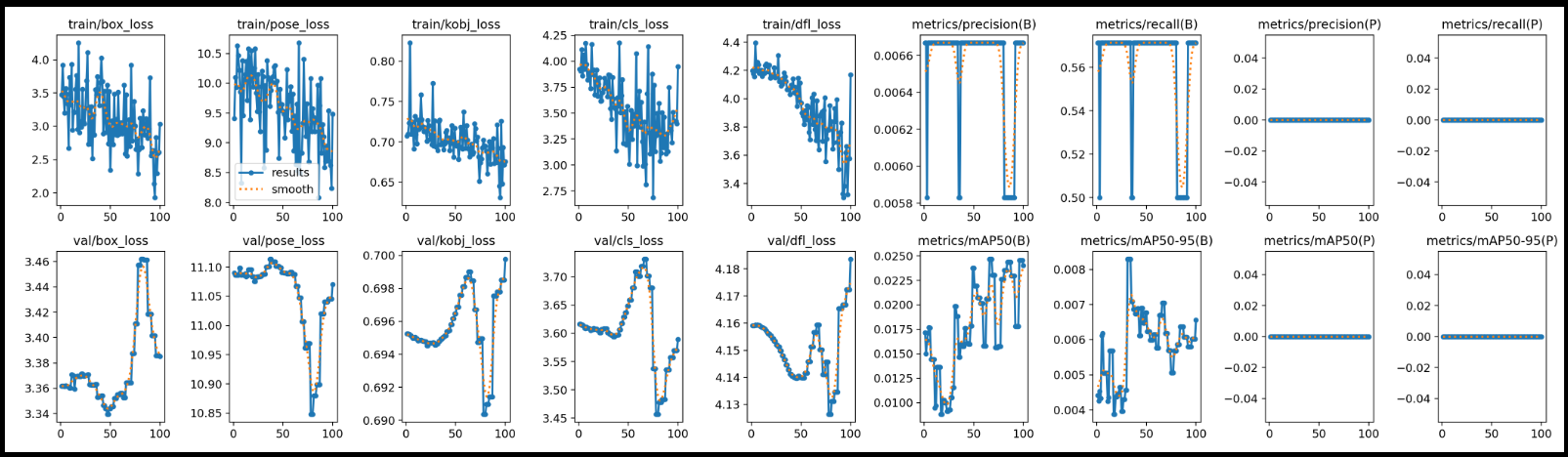
from ultralytics import YOLO
model= YOLO('yolov8n-pose.pt')
model(source = 'people_walk.mp4', save=True, imgsz=1280)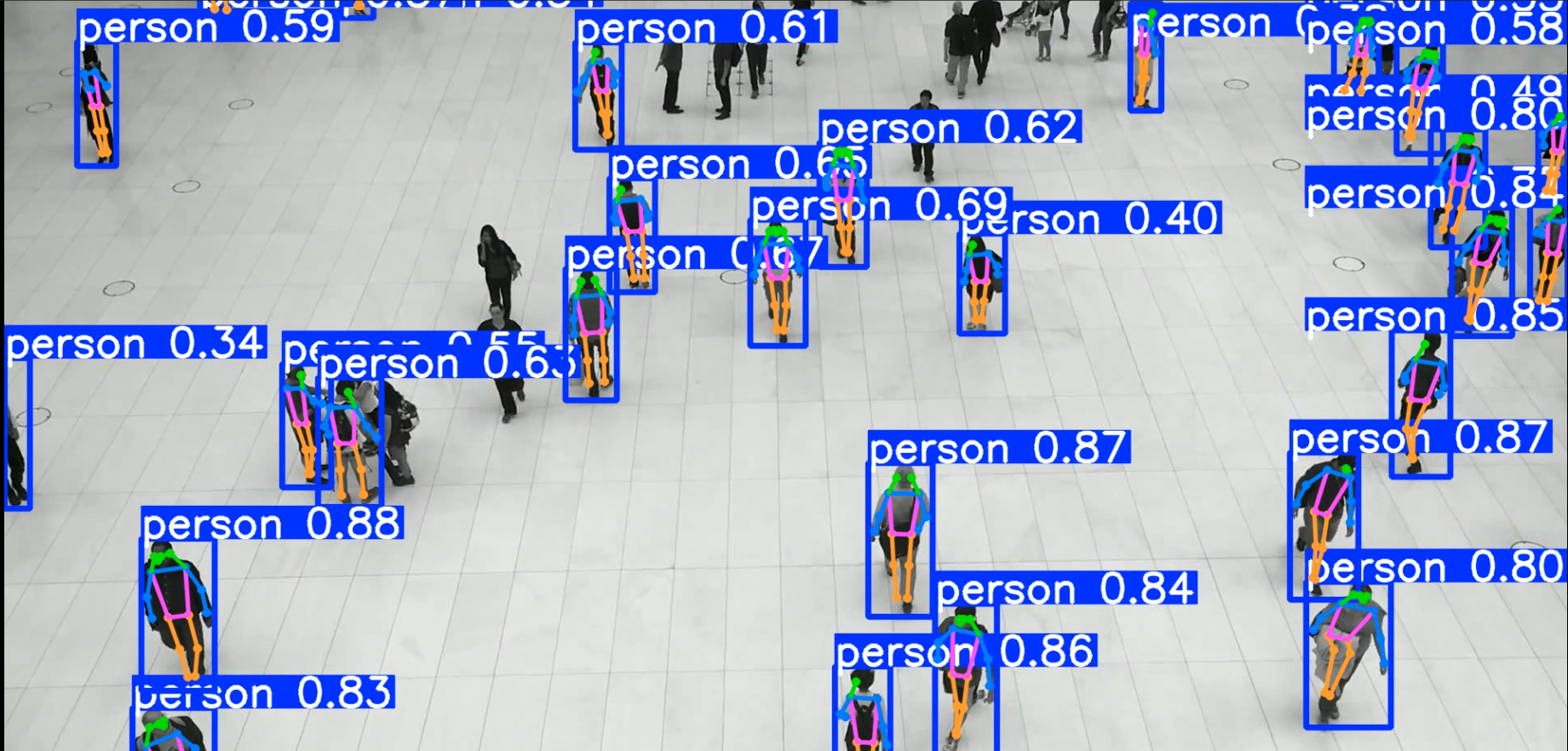
- 데이터 셋 준비 (샘플데이터)
실내 구매행동 데이터
from ultralytics import YOLO
import cv2
import math
import numpy as npcolorMap = {
'leftNeck' : (255,0,0),
'rightNeck' : (0,0,255),
'neck' : (0,0,255),
'leftUpperArm' : (205,90,106),
'rightUpperArm' : (147,20,255),
'leftLowerArm' : (129,61,72),
'rightLowerArm' : (180,105,255),
'leftBody':(221,160,221),
'rightBody':(238,130,238),
'pelvis':(50,205,50),
'leftUpperLeg':(255,0,255),
'rightUpperLeg':(128,0,0),
'leftLowerLeg' : (193,182,255),
'rightLowerLeg' : (139,61,72)
}partDict = {
'leftNeck':(3,5),
'rightNeck' : (4,6),
'neck' : (5, 6),
'leftUpperArm' : (5,7),
'rightUpperArm' : (6,8),
'leftLowerArm' : (7,9),
'rightLowerArm' : (8,10),
'leftBody' :(5,11),
'rightBody':(6,12),
'pelvis':(11,12),
'leftUpperLeg':(11,13),
'rightUpperLeg':(12,14),
'leftLowerLeg':(13,15),
'rightLowerLeg':(14,16)
}def distance(x1, y1, x2, y2):
result = math.sqrt(math.pow(x1 - x2, 2) + math.pow(y1 - y2, 2))
return int(result)
def drawLine(frame, name, org, dst):
if (org.any() == 0 or dst.any() == 0):
return frame
frame = cv2.line(frame, org, dst, colorMap[name], 5)
return framemodel = YOLO('yolov8n-pose.pt')
cap = cv2.VideoCapture('sample.mp4')
while True:
ret, frame = cap.read()
if not ret:
print('Video frame is empty or video processing has been successfully completed')
break
frame = cv2.resize(frame, (1280, 720))
results = model(frame, stream=True)
for r in results:
keypoints = r.keypoints
for ks in keypoints:
# Convert CUDA Tensor to numpy array
k = np.array(ks.xy[0].cpu(), dtype=int)
try:
cv2.circle(
frame,
(k[0][0], k[0][1]),
int(np.linalg.norm(k[0] - k[3])),
(255, 255, 255),
5
)
for idx, (name, (org, dst)) in enumerate(partDict.items()):
frame = cv2.putText(
frame,
name + str(k[org]) + str(k[dst]),
(50, idx * 30),
cv2.FONT_HERSHEY_COMPLEX,
1,
(0, 255, 255),
2
)
frame = drawLine(frame, name, k[org], k[dst])
except Exception as e:
print(e)
cv2.imshow('result preview', frame)
if cv2.waitKey(1) == ord('q'):
break
cap.release()
cv2.destroyAllWindows()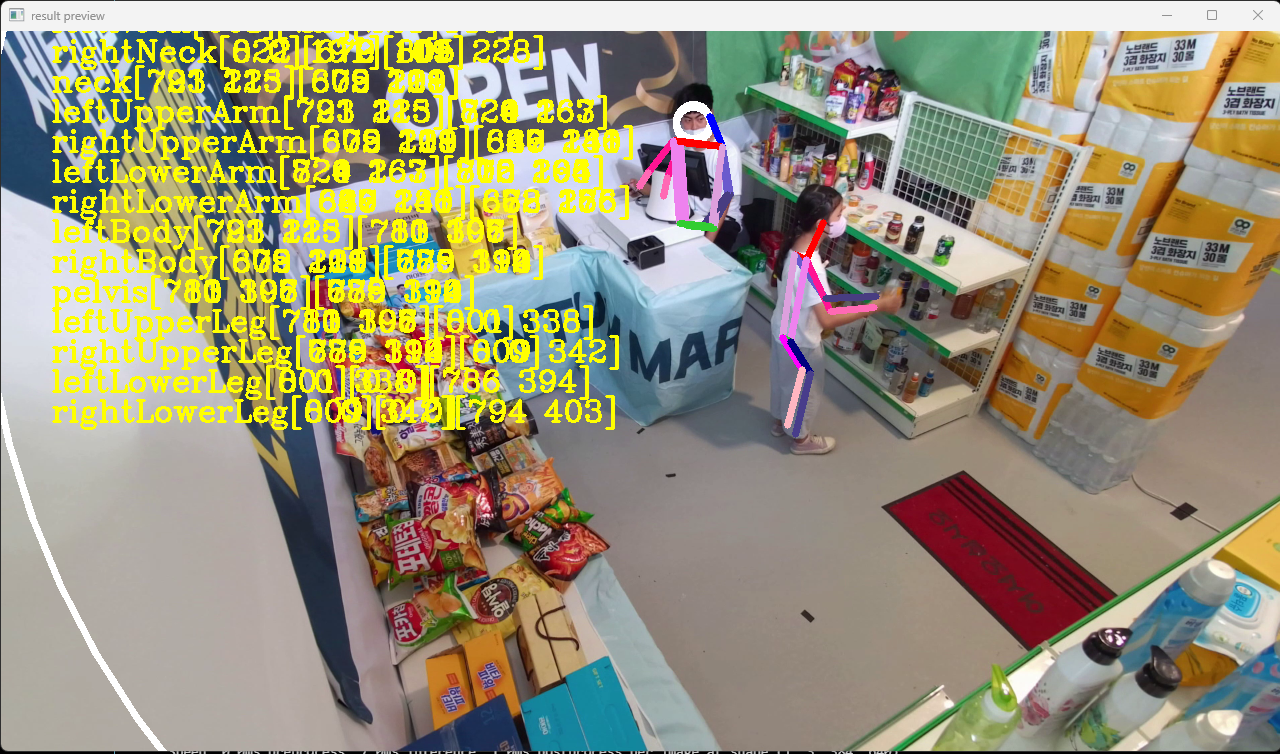
이 글은 제로베이스 데이터 취업 스쿨의 강의 자료 일부를 발췌하여 작성되었습니다
