Image formation model
👉🏻-
Scene element: 물체
-
Illumination source (Energy): 빛
-
Image system
- Filter 로 통과된 Energy 를 센서를 이용하여 Voltage wave form 반환
-
(Internal) Image plain: 2D 투영 공간
-
Output (Digitized) image: 결과
Bayer pattern
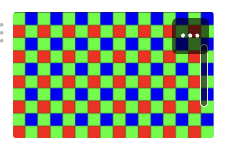
- 센서 위에 배치된 컬러 필터 배열
- 센서는 빛의 강도를 측정할 수 있지만, 색상 정보를 직접적으로 캡처할 수 없음
- 인간은 녹색에 가장 민감하므로 더 높은 해상도의 높은 해상도의 녹생 정보를 캡처하여 이미지 품지 향상
Camera Model
- Camera: Mapping 3D scene space → 2D image plane
- 좌표계
-
World coordinate(3D): origin (0, 0, 0)
-
Camera coordinate(3D): 카메라의 origin 을 기준으로
-
Pixel coordinate(=image plane, 2D)
- image
- relation with Camera: intrinsic parameters of camera
-
Normalized image plane
- Removing intrinsic parameters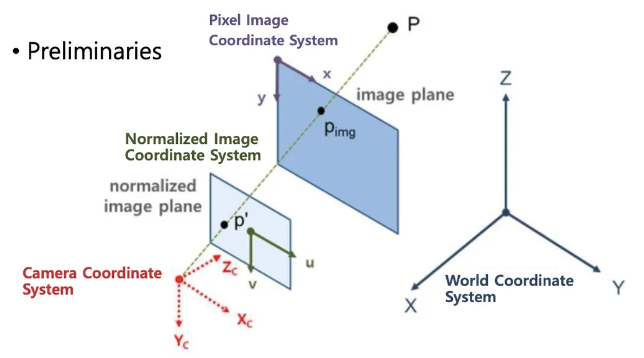
-
- Inhomogeneous vs. Homogeneous
- Inhomogeneous: 2D→(x,y), 3D→(x,y,z)
- Homogeneous: 2D→(x,y,1), 3D→(x,y,z,1)
- (x,y,z,1) = (2x,2y,2z,2)
Camera Calibration
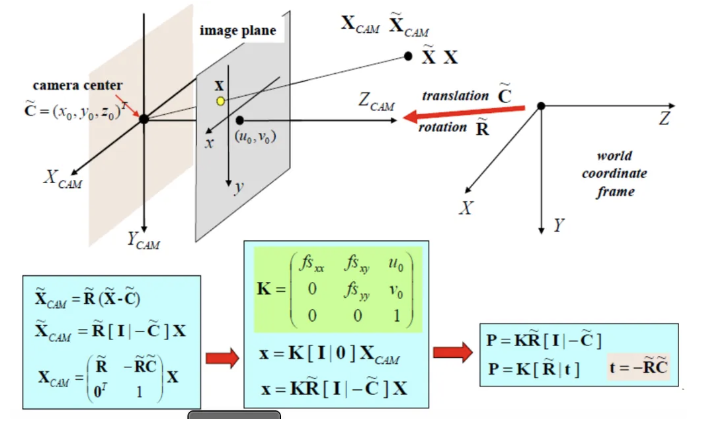
- Camera parameters
- Intrinsic parameters
- Principal point(u0,v0), focal length(초점거리), skew parameter, pixel size(sx, sy)
- extrinsic parameter
- Rotation & translation of a camera center
- K (Sxy: skew parameter, f: focal length)
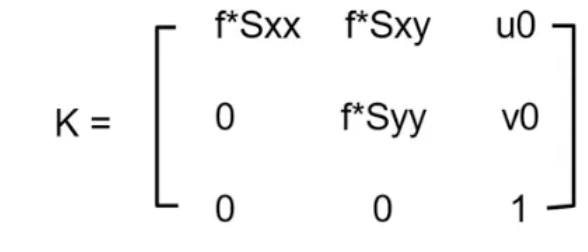
- Intrinsic parameters
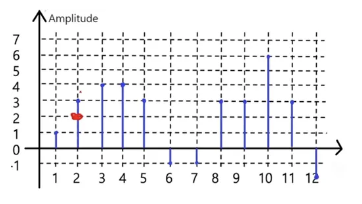
Exercise
- Sampling
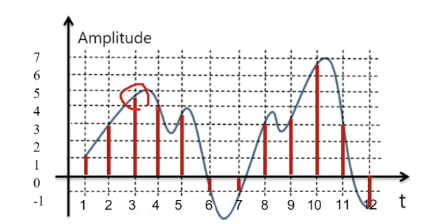
- quantization
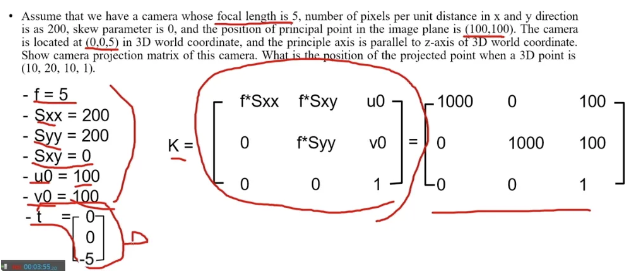
- Camera Calibration
-
focal length = f = 5
-
distance of x and y direction = Sxx, Syy = 200, 200
-
skew pararmeter = Sxy = 0
-
principal point = u0, v0 = 100, 100
-
- camera location = t = 0 0 -5

-

해야한다면, 다 하게 되더라.