(Jetson Project#15)Implementing Cartographer SLAM_근데 에러를 곁들인
Developing Self Driving with Jetson Nano
목록 보기
26/33

Part 8: Implementing Cartographer SLAM
8.1. Install Cartographer ROS
1. Install Dependencies:
sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow- Create a New Workspace for Cartographer:
mkdir -p ~/cartographer_ws/src
cd ~/cartographer_ws- Initialize wstool:
wstool init src- Merge Cartographer's ROS Installation:
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall- Update the Workspace:
wstool update -t src- Install Protocol Buffers (If Necessary):
sudo apt-get install -y libprotobuf-dev protobuf-compiler- Initialize and Update rosdep:
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=noetic -yBut, error..... si
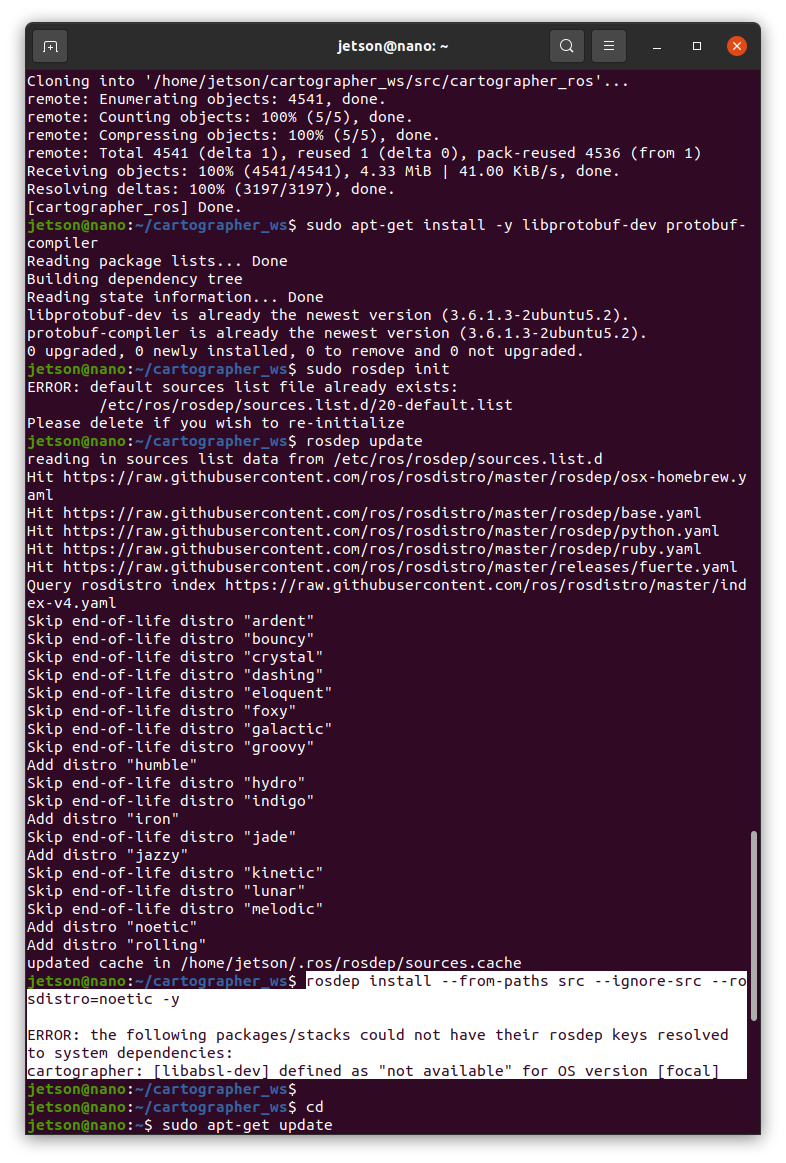
errored at "libabsl-dev"
Solution: Building and Installing Abseil C++ (abseil-cpp)
Step 1: Install Necessary Build Tools and Dependencies
First, ensure that you have all the necessary tools and dependencies installed:
sudo apt-get update
sudo apt-get install -y \
build-essential \
ninja-build \
stow \
git \
cmake \
libcairo2-dev \
libpango1.0-dev \
liblua5.3-dev \
libboost-all-dev \
libgflags-dev \
libgoogle-glog-dev \
libprotobuf-dev \
protobuf-compiler \
libceres-dev \
python3-sphinx \
libeigen3-dev \
libjsoncpp-dev \
python3-wstool \
python3-rosdep \
python3-catkin-tools \
ros-noetic-tf2-eigen \
ros-noetic-tf2-sensor-msgsStep 2: Download Abseil C++ Source Code
Clone the Abseil C++ repository from GitHub:
cd ~
git clone https://github.com/abseil/abseil-cpp.git
Step 3: Build and Install Abseil C++
Build and install abseil-cpp:
cd abseil-cpp
mkdir build && cd build
cmake -DCMAKE_POSITION_INDEPENDENT_CODE=ON -DCMAKE_BUILD_TYPE=Release ..
make -j$(nproc)
sudo make install
Explanation:
- CMAKE_POSITION_INDEPENDENT_CODE=ON ensures that position-independent code is generated, which is necessary for shared libraries.
- sudo make install installs the library files to /usr/local/lib and header files to /usr/local/include/absl.
Step 4: Update Library Cache
After installing new libraries, update the system's library cache:
sudo ldconfigStep 5: Verify Abseil Installation
Check that the Abseil libraries are installed:
ls /usr/local/lib/libabsl_*.a
You should see several libabsl_*.a files listed.
Step6: At "cartograher", edit "package.xml"
cd ~/cartographer_ws/src/cartographer
ls
nano package.xml- edit package.xml
remove this part.
<depend>libabsl-dev</depend>Full script.
<?xml version="1.0"?>
<!--
Copyright 2016 The Cartographer Authors
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
<package format="3">
<name>cartographer</name>
<version>2.0.0</version>
<description>
Cartographer is a system that provides real-time simultaneous localization
and mapping (SLAM) in 2D and 3D across multiple platforms and sensor
configurations.
</description>
<maintainer email="cartographer-owners@googlegroups.com">
The Cartographer Authors
</maintainer>
<license>Apache 2.0</license>
<url>https://github.com/cartographer-project/cartographer</url>
<author email="google-cartographer@googlegroups.com">
The Cartographer Authors
</author>
<buildtool_depend>cmake</buildtool_depend>
<build_depend>git</build_depend>
<build_depend>google-mock</build_depend>
<build_depend>gtest</build_depend>
<build_depend>python3-sphinx</build_depend>
<depend>libboost-iostreams-dev</depend>
<depend>eigen</depend>
<!-- depend>libabsl-dev/depend -->
<depend>libcairo2-dev</depend>
<depend>libceres-dev</depend>
<depend>libgflags-dev</depend>
<depend>libgoogle-glog-dev</depend>
<depend>lua5.2-dev</depend>
<depend>protobuf-dev</depend>
<export>
<build_type>cmake</build_type>
</export>
</package>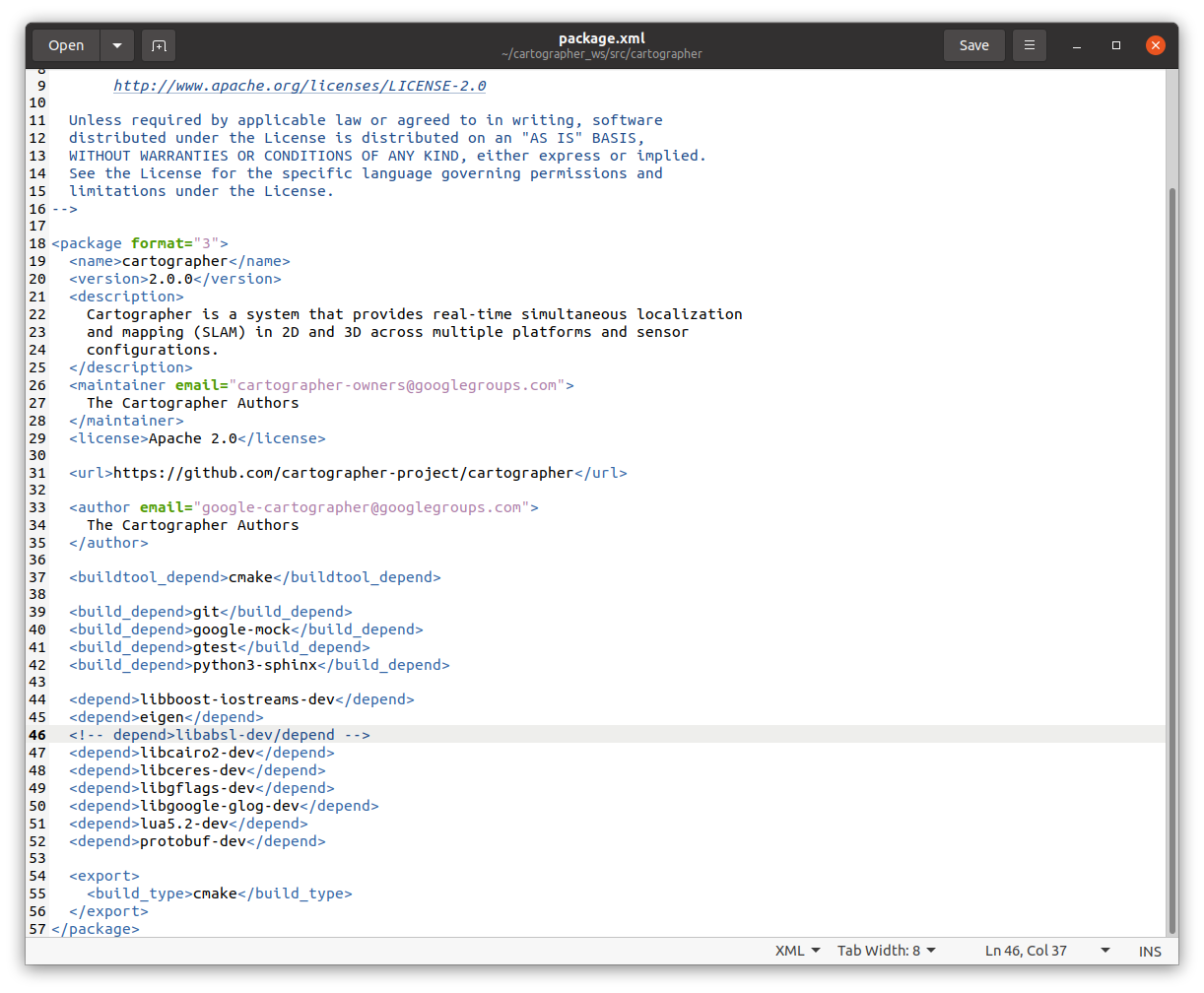
Step7: Reproceed with Cartographer Installation
cd ~/cartographer_ws
rosdep install --from-paths src --ignore-src --rosdistro=noetic -y --skip-keys=libabsl-dev
catkin_make_isolated --install --use-ninja
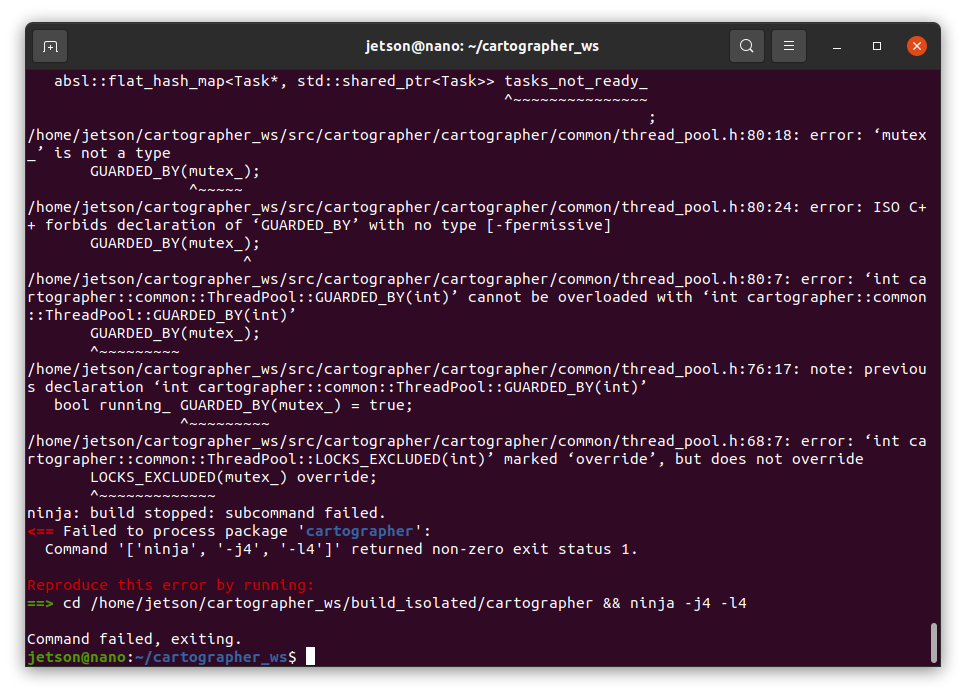
..... Erorr again...

..