(Jetson Project#6)MPU6050 GY-521 6-Axis IMU Sensor_Custom Script Create
Developing Self Driving with Jetson Nano
Part 3: Install Necessary Software Libraries
To interact with the MPU6050 via I2C in Python, install the required libraries.
3.1. Install Python Libraries
1. Install smbus and i2c-tools:
sudo apt-get update
sudo apt-get install -y python3-smbus
sudo apt-get install -y i2c-tools
2. Install rospy and ROS Dependencies:
Ensure your ROS environment is properly sourced.
source /opt/ros/noetic/setup.bash
source ~/catkin_ws/devel/setup.bash
Install any missing dependencies using rosdep:
cd ~/catkin_ws/
rosdep install --from-paths src --ignore-src -r -y3.2. Verify Python I2C Communication
Before integrating with ROS, test if you can communicate with the MPU6050.
1. Create a Python Script to Read MPU6050 Data:
mkdir -p ~/catkin_ws/src/mpu6050_driver/scripts
nano ~/catkin_ws/src/mpu6050_driver/scripts/mpu6050_test.py
2.Add the Following Content:
#!/usr/bin/env python3
import smbus
import time
# MPU6050 Registers
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
INT_ENABLE = 0x38
ACCEL_XOUT_H = 0x3B
ACCEL_YOUT_H = 0x3D
ACCEL_ZOUT_H = 0x3F
GYRO_XOUT_H = 0x43
GYRO_YOUT_H = 0x45
GYRO_ZOUT_H = 0x47
def read_word(bus, addr):
high = bus.read_byte_data(0x68, addr)
low = bus.read_byte_data(0x68, addr+1)
val = (high << 8) + low
if val >= 0x8000:
return -((65535 - val) + 1)
else:
return val
def main():
bus = smbus.SMBus(1) # I2C bus
# Wake up the MPU6050
bus.write_byte_data(0x68, PWR_MGMT_1, 0)
while True:
accel_x = read_word(bus, ACCEL_XOUT_H)
accel_y = read_word(bus, ACCEL_YOUT_H)
accel_z = read_word(bus, ACCEL_ZOUT_H)
gyro_x = read_word(bus, GYRO_XOUT_H)
gyro_y = read_word(bus, GYRO_YOUT_H)
gyro_z = read_word(bus, GYRO_ZOUT_H)
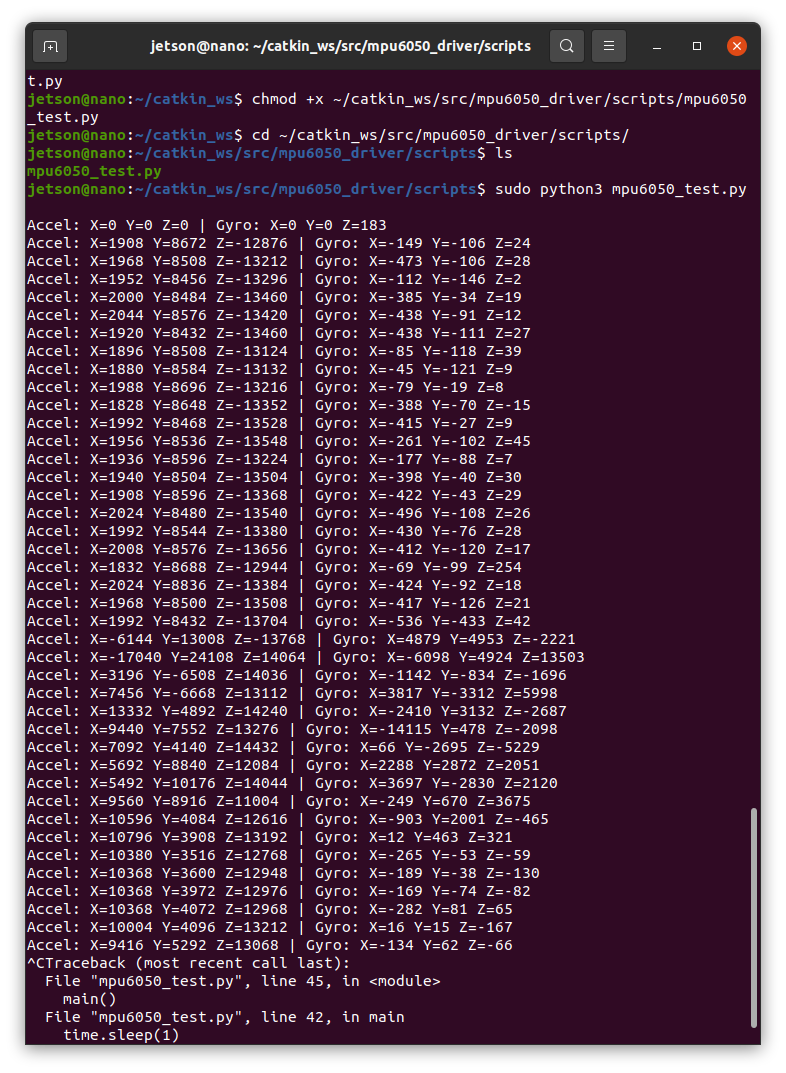
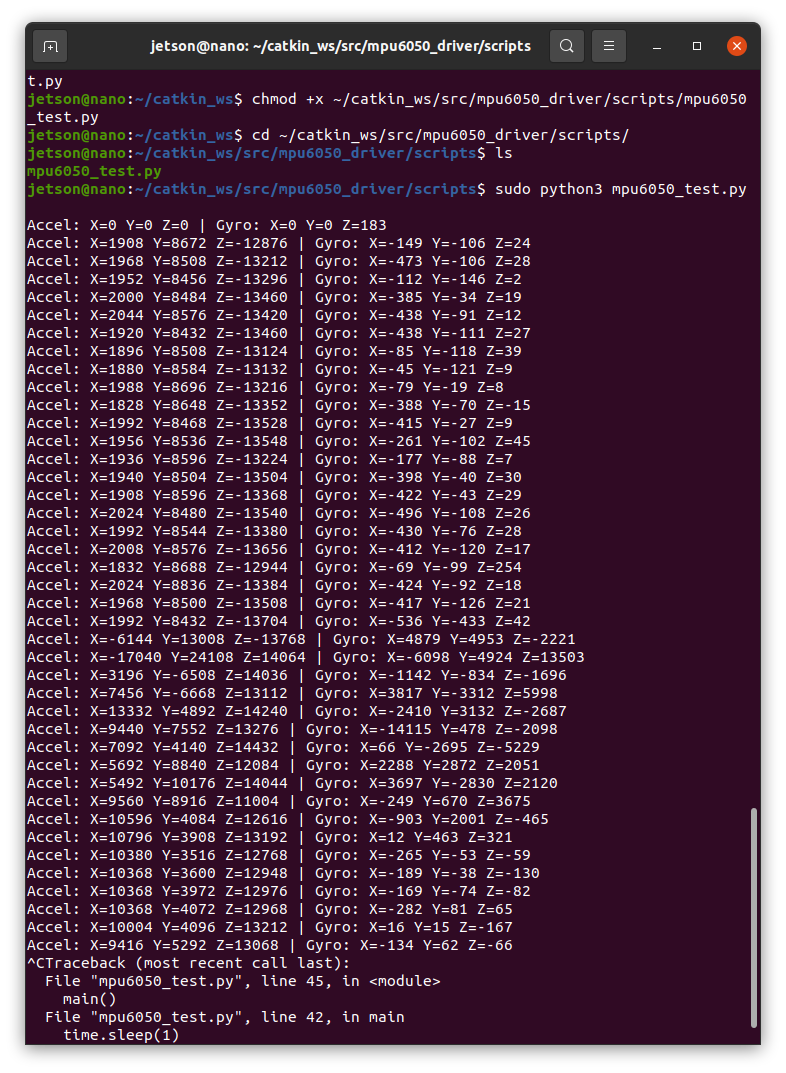
print(f"Accel: X={accel_x} Y={accel_y} Z={accel_z} | Gyro: X={gyro_x} Y={gyro_y} Z={gyro_z}")
time.sleep(1)
if __name__ == "__main__":
main()
3. Make the Script Executable:
chmod +x ~/catkin_ws/src/mpu6050_driver/scripts/mpu6050_test.py4. Run the Test Script:
sudo python3 ~/catkin_ws/src/mpu6050_driver/scripts/mpu6050_test.py
Part 4: Create a Custom ROS Package for MPU6050
Now, we'll create a ROS package that reads data from the MPU6050 and publishes it as sensor_msgs/Imu.
4.1. Create the ROS Package
1. Navigate to Your Catkin Workspace's Source Directory:
cd ~/catkin_ws/src2. Create the Package:
catkin_create_pkg mpu6050_driver rospy std_msgs sensor_msgs tf
4.2. Develop the IMU Publisher Node
1. Navigate to the Package's Scripts Directory:
mkdir -p ~/catkin_ws/src/mpu6050_driver/scripts
cd ~/catkin_ws/src/mpu6050_driver/scripts2. Create the mpu6050_publisher.py Script:
nano mpu6050_publisher.py3. Add the Following Content:
#!/usr/bin/env python3
import rospy
import smbus
import time
from sensor_msgs.msg import Imu
from geometry_msgs.msg import Quaternion
from tf.transformations import quaternion_from_euler
# MPU6050 Registers
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
ACCEL_CONFIG = 0x1C # Added definition for ACCEL_CONFIG
INT_ENABLE = 0x38
ACCEL_XOUT_H = 0x3B
ACCEL_YOUT_H = 0x3D
ACCEL_ZOUT_H = 0x3F
GYRO_XOUT_H = 0x43
GYRO_YOUT_H = 0x45
GYRO_ZOUT_H = 0x47
def read_word(bus, addr):
high = bus.read_byte_data(0x68, addr)
low = bus.read_byte_data(0x68, addr+1)
val = (high << 8) + low
if val >= 0x8000:
return -((65535 - val) + 1)
else:
return val
def mpu6050_init(bus):
# Wake up the MPU6050
bus.write_byte_data(0x68, PWR_MGMT_1, 0)
# Set accelerometer configuration (±2g)
bus.write_byte_data(0x68, ACCEL_CONFIG, 0x00)
# Set gyroscope configuration (±250°/s)
bus.write_byte_data(0x68, GYRO_CONFIG, 0x00)
def main():
rospy.init_node('mpu6050_publisher', anonymous=True)
imu_pub = rospy.Publisher('/imu/data_raw', Imu, queue_size=10)
bus = smbus.SMBus(1) # I2C bus
mpu6050_init(bus)
imu_msg = Imu()
imu_msg.header.frame_id = "imu_link"
rate = rospy.Rate(10) # 10 Hz
while not rospy.is_shutdown():
accel_x = read_word(bus, ACCEL_XOUT_H) / 16384.0
accel_y = read_word(bus, ACCEL_YOUT_H) / 16384.0
accel_z = read_word(bus, ACCEL_ZOUT_H) / 16384.0
gyro_x = read_word(bus, GYRO_XOUT_H) / 131.0
gyro_y = read_word(bus, GYRO_YOUT_H) / 131.0
gyro_z = read_word(bus, GYRO_ZOUT_H) / 131.0
# Populate the Imu message
imu_msg.header.stamp = rospy.Time.now()
imu_msg.linear_acceleration.x = accel_x
imu_msg.linear_acceleration.y = accel_y
imu_msg.linear_acceleration.z = accel_z
# For simplicity, set orientation to zero quaternion
quat = quaternion_from_euler(0, 0, 0)
imu_msg.orientation = Quaternion(*quat)
# Set angular velocity
imu_msg.angular_velocity.x = gyro_x
imu_msg.angular_velocity.y = gyro_y
imu_msg.angular_velocity.z = gyro_z
# Optionally, set covariance matrices
imu_msg.orientation_covariance = [0, 0, 0, 0, 0, 0, 0, 0, 0]
imu_msg.angular_velocity_covariance = [0, 0, 0, 0, 0, 0, 0, 0, 0]
imu_msg.linear_acceleration_covariance = [0, 0, 0, 0, 0, 0, 0, 0, 0]
imu_pub.publish(imu_msg)
rospy.loginfo(f"Accel: X={accel_x} Y={accel_y} Z={accel_z} | Gyro: X={gyro_x} Y={gyro_y} Z={gyro_z}")
rate.sleep()
if __name__ == "__main__":
try:
main()
except rospy.ROSInterruptException:
pass
Initialization: Wakes up the MPU6050 and configures the accelerometer and gyroscope ranges.
Data Reading: Reads accelerometer and gyroscope data from the MPU6050.
Converts raw data to physical units (g for acceleration and °/s for gyroscope).
Publishing:Populates a sensor_msgs/Imu message with the read data.
Publishes the message to the /imu/data_raw topic.
Logging: Logs the acceleration and gyroscope data to the console for verification.
4. Make the Script Executable:
chmod +x ~/catkin_ws/src/mpu6050_driver/scripts/mpu6050_publisher.py4.3. Update package.xml and CMakeLists.txt
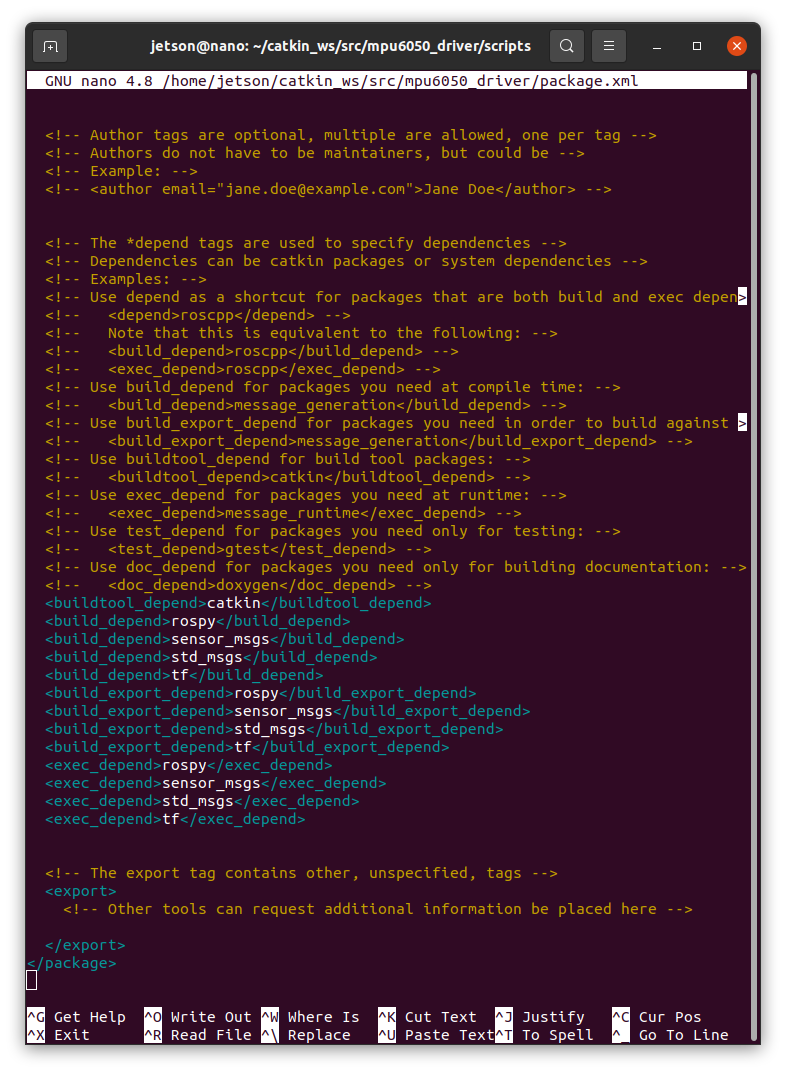
1. Edit package.xml:
nano ~/catkin_ws/src/mpu6050_driver/package.xml
Ensure the Following Dependencies Are Listed:
<depend>rospy</depend>
<depend>std_msgs</depend>
<depend>sensor_msgs</depend>
<depend>tf</depend>
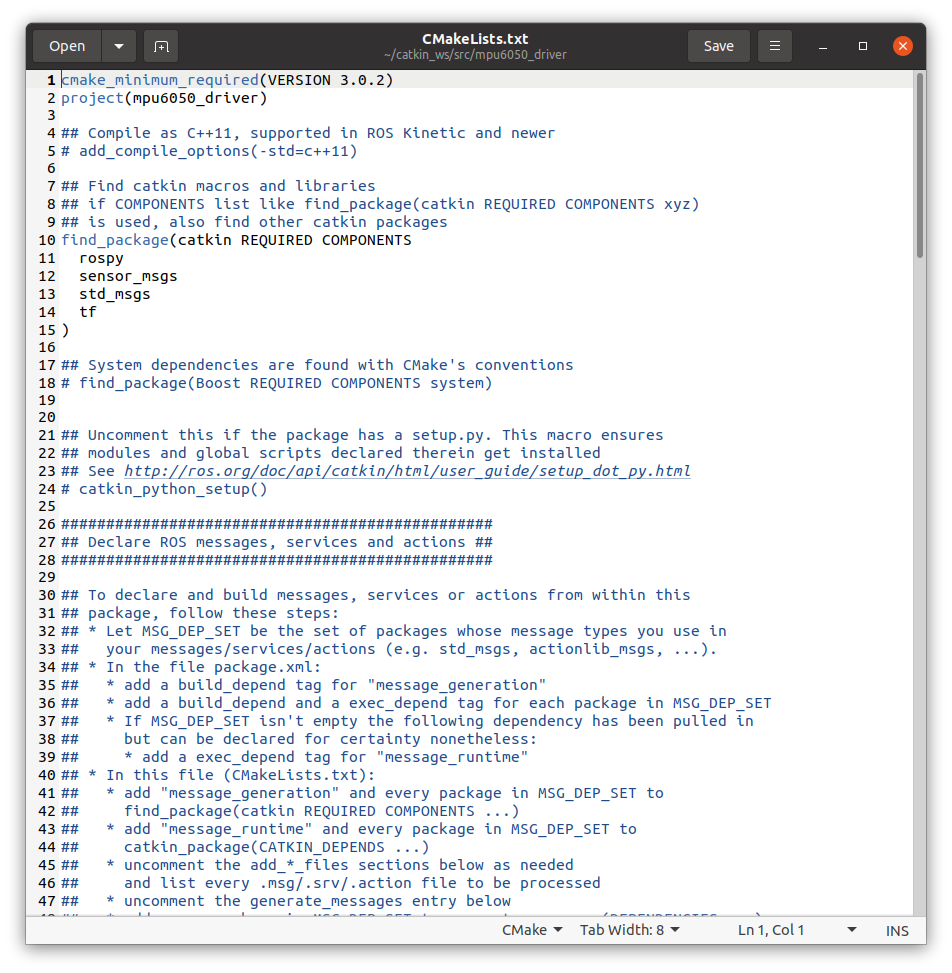
2. Edit CMakeLists.txt:
nano ~/catkin_ws/src/mpu6050_driver/CMakeLists.txt
Add the Following Lines at the End:
catkin_install_python(PROGRAMS scripts/mpu6050_publisher.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
Ensure You Have the Following Lines for Dependencies:
find_package(catkin REQUIRED COMPONENTS
rospy
std_msgs
sensor_msgs
tf
)
4.4. Build the ROS Package
1. Navigate to Your Catkin Workspace:
cd ~/catkin_ws
2. Build the Workspace:
catkin_make3. Source the Workspace:
source devel/setup.bash
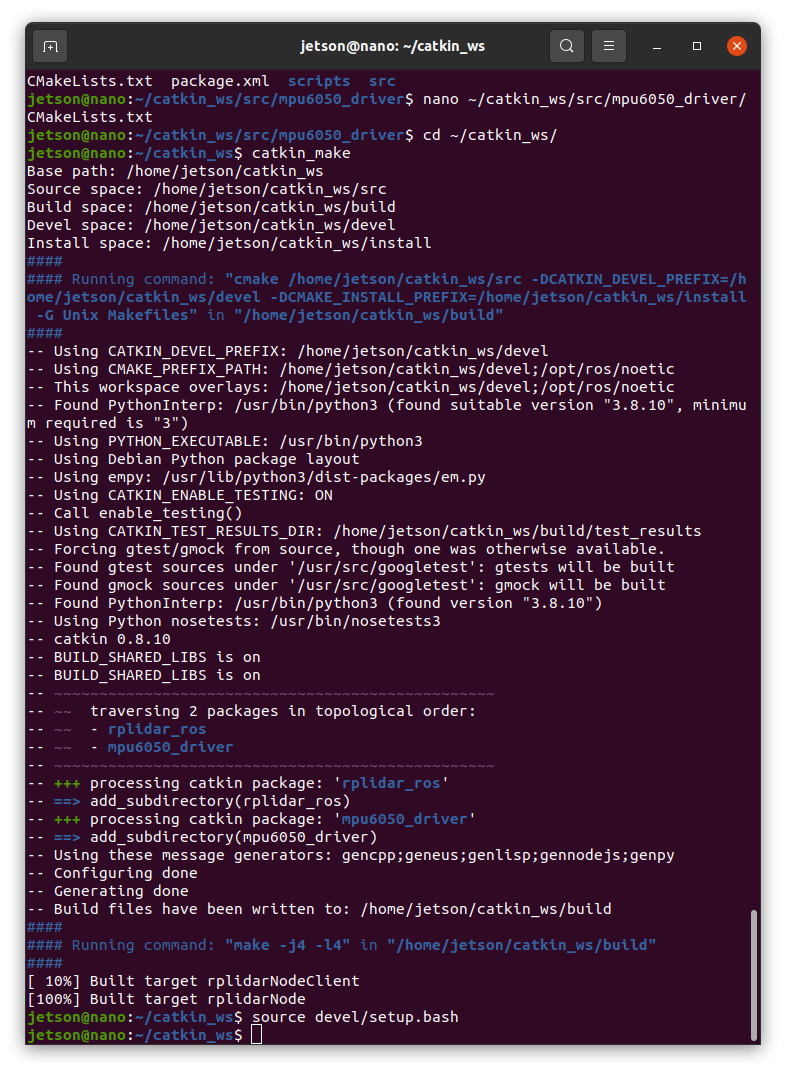
4. Barely, success.
