(Jetson Project#7)Launch the MPU6050 IMU Node and Visualize in RViz (1)
Developing Self Driving with Jetson Nano
목록 보기
15/33
Launch the MPU6050 IMU Node and Visualize in RViz
5.1. Create a Launch File for the IMU Node
1. Navigate to the Launch Directory:
mkdir -p ~/catkin_ws/src/mpu6050_driver/launch
cd ~/catkin_ws/src/mpu6050_driver/launch2. Create the mpu6050.launch File:
nano mpu6050.launch
3. Add the Following Content:
<launch>
<!-- Launch the MPU6050 Publisher Node -->
<node name="mpu6050_publisher" pkg="mpu6050_driver" type="mpu6050_publisher.py" output="screen"/>
<!-- Optional: Launch the TF Broadcaster Node -->
<!--
<node name="imu_tf_broadcaster" pkg="mpu6050_driver" type="tf_broadcaster.py" output="screen"/>
-->
</launch>
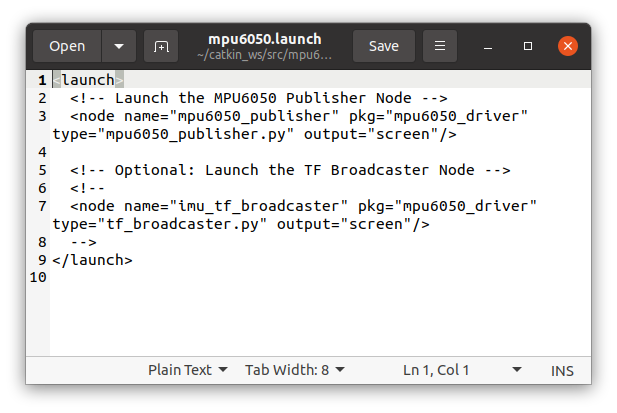
Explanation:
This launch file starts the mpu6050_publisher node, which reads data from the MPU6050 and publishes it to the /imu/data_raw topic.
5.2. Launch the IMU Node
1. Ensure Your ROS Environment Is Sourced:
source /opt/ros/noetic/setup.bash
source ~/catkin_ws/devel/setup.bash
2. Run the Launch File:
roslaunch mpu6050_driver mpu6050.launch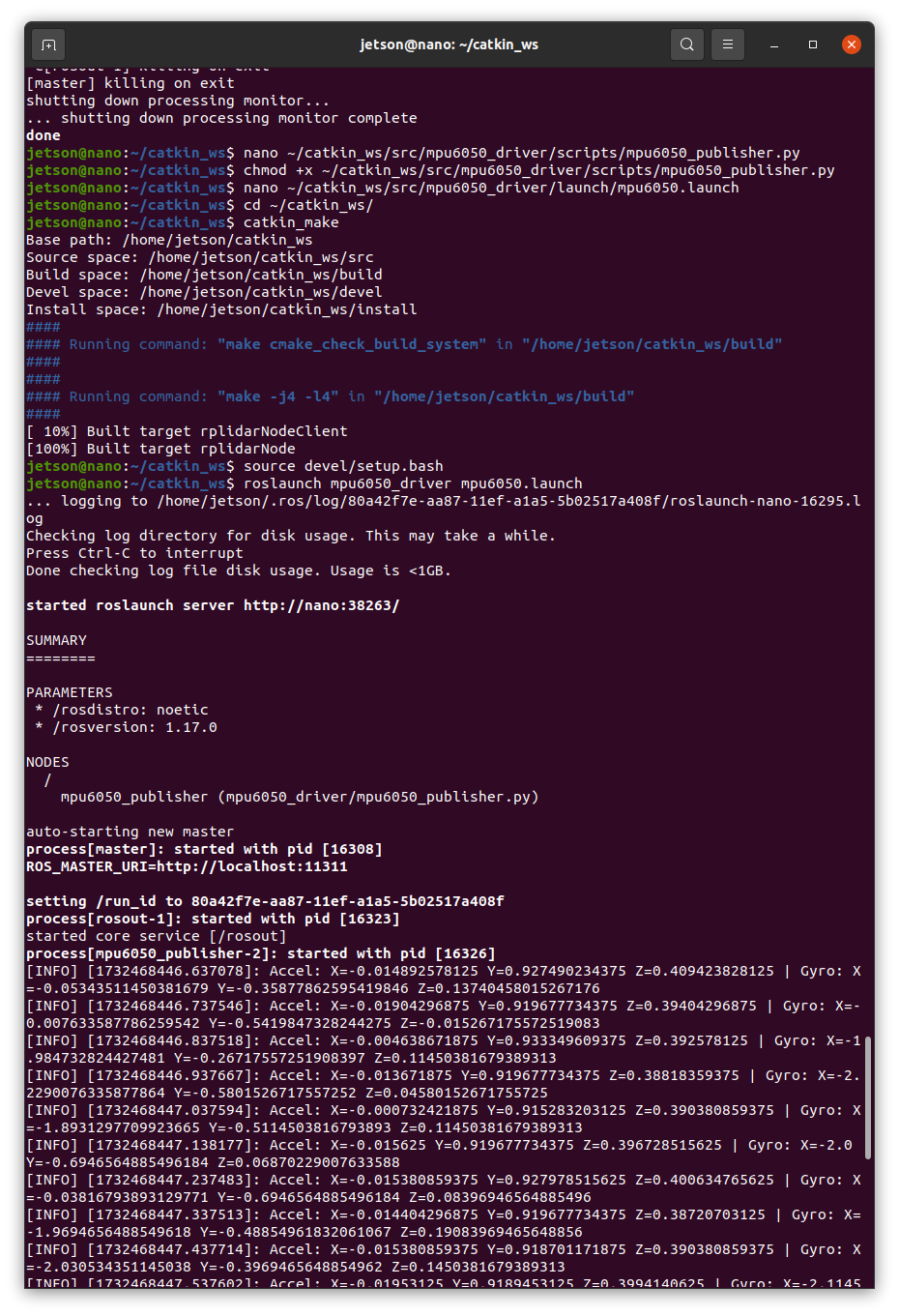

..