(Jetson Project#7)Launch the MPU6050 IMU Node and Visualize in RViz (2)_Trouble Shooting
Developing Self Driving with Jetson Nano
Following the previous post, I want to visualizing.
For this, Verify the IMU Node Functionality first.
After launching, you should verify that the IMU node is publishing data correctly.
4.1. Check ROS Topics
In a new terminal, ensure your ROS environment is sourced:
source /opt/ros/noetic/setup.bash
source ~/catkin_ws/devel/setup.bashThen, list the active ROS topics:
rostopic listExpected Output:
/imu/data_raw
/rosout
/rosout_agg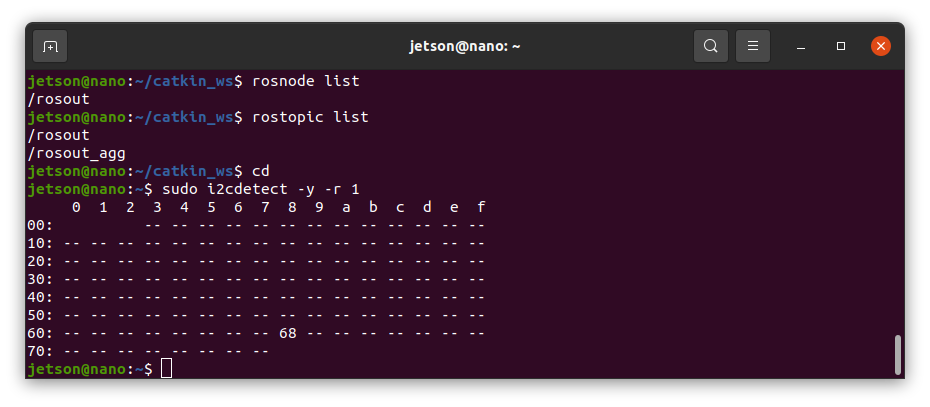
But, I can see only
/rosout
/rosout_agg
4.1. Check ROS Topics_ Trouble Shooting.
Step 1: Verify and Correct the mpu6050_publisher.py Script
1.1. Ensure All Necessary Constants Are Defined
The NameError indicates that ACCEL_CONFIG wasn't defined. Let's ensure that all necessary register constants for the MPU6050 are correctly defined in your script.
locate
nano ~/catkin_ws/src/mpu6050_driver/scripts/mpu6050_publisher.py
Corrected mpu6050_publisher.py Script:
#!/usr/bin/env python3
import rospy
import smbus
import time
from sensor_msgs.msg import Imu
from geometry_msgs.msg import Quaternion
from tf.transformations import quaternion_from_euler
# MPU6050 Registers
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
ACCEL_CONFIG = 0x1C # Added definition for ACCEL_CONFIG
INT_ENABLE = 0x38
ACCEL_XOUT_H = 0x3B
ACCEL_YOUT_H = 0x3D
ACCEL_ZOUT_H = 0x3F
GYRO_XOUT_H = 0x43
GYRO_YOUT_H = 0x45
GYRO_ZOUT_H = 0x47
def read_word(bus, addr):
high = bus.read_byte_data(0x68, addr)
low = bus.read_byte_data(0x68, addr+1)
val = (high << 8) + low
if val >= 0x8000:
return -((65535 - val) + 1)
else:
return val
def mpu6050_init(bus):
# Wake up the MPU6050
bus.write_byte_data(0x68, PWR_MGMT_1, 0)
# Set accelerometer configuration (±2g)
bus.write_byte_data(0x68, ACCEL_CONFIG, 0x00)
# Set gyroscope configuration (±250°/s)
bus.write_byte_data(0x68, GYRO_CONFIG, 0x00)
def main():
rospy.init_node('mpu6050_publisher', anonymous=True)
imu_pub = rospy.Publisher('/imu/data_raw', Imu, queue_size=10)
bus = smbus.SMBus(1) # I2C bus
try:
mpu6050_init(bus)
except Exception as e:
rospy.logerr(f"Failed to initialize MPU6050: {e}")
rospy.signal_shutdown("MPU6050 initialization failed")
imu_msg = Imu()
imu_msg.header.frame_id = "imu_link"
rate = rospy.Rate(10) # 10 Hz
while not rospy.is_shutdown():
try:
accel_x = read_word(bus, ACCEL_XOUT_H) / 16384.0
accel_y = read_word(bus, ACCEL_YOUT_H) / 16384.0
accel_z = read_word(bus, ACCEL_ZOUT_H) / 16384.0
gyro_x = read_word(bus, GYRO_XOUT_H) / 131.0
gyro_y = read_word(bus, GYRO_YOUT_H) / 131.0
gyro_z = read_word(bus, GYRO_ZOUT_H) / 131.0
except Exception as e:
rospy.logerr(f"Error reading MPU6050 data: {e}")
rate.sleep()
continue
# Populate the Imu message
imu_msg.header.stamp = rospy.Time.now()
imu_msg.linear_acceleration.x = accel_x
imu_msg.linear_acceleration.y = accel_y
imu_msg.linear_acceleration.z = accel_z
# For simplicity, set orientation to zero quaternion
quat = quaternion_from_euler(0, 0, 0)
imu_msg.orientation = Quaternion(*quat)
# Set angular velocity
imu_msg.angular_velocity.x = gyro_x
imu_msg.angular_velocity.y = gyro_y
imu_msg.angular_velocity.z = gyro_z
# Optionally, set covariance matrices (set to high uncertainty if not calibrated)
imu_msg.orientation_covariance = [0.1, 0, 0, 0, 0.1, 0, 0, 0, 0.1]
imu_msg.angular_velocity_covariance = [0.1, 0, 0, 0, 0.1, 0, 0, 0, 0.1]
imu_msg.linear_acceleration_covariance = [0.1, 0, 0, 0, 0.1, 0, 0, 0, 0.1]
imu_pub.publish(imu_msg)
rospy.loginfo(f"Accel: X={accel_x:.2f} Y={accel_y:.2f} Z={accel_z:.2f} | Gyro: X={gyro_x:.2f} Y={gyro_y:.2f} Z={gyro_z:.2f}")
rate.sleep()
if __name__ == "__main__":
try:
main()
except rospy.ROSInterruptException:
pass
1.2. Key Corrections and Enhancements
Defined ACCEL_CONFIG: Added the missing ACCEL_CONFIG = 0x1C to avoid the NameError.
Error Handling: Wrapped the initialization and data reading sections in try-except blocks to catch and log exceptions without crashing the node abruptly.
Covariance Matrices: Set default covariance values to indicate uncertainty. Adjust these values based on your calibration results for better accuracy.
Logging Improvements: Enhanced logging with formatted output for better readability.
Make the Script Executable
chmod +x ~/catkin_ws/src/mpu6050_driver/scripts/mpu6050_publisher.py
Step 2: Rebuild the Catkin Workspace and Source
After making changes to scripts and launch files, it's essential to rebuild the workspace and source the setup file to apply the changes.
- Navigate to catkin Workspace && Build the workspace
cd ~/catkin_ws
catkin_make- Source the Setup File:
source devel/setup.bashStep 3: Launch the MPU6050 IMU Node
Now, let's launch the MPU6050 node and verify its functionality.
1. Launch the Node:
roslaunch mpu6050_driver mpu6050.launchJust for test.
2. Verify Node Status
(open new terminal with ROS environment is sourced):
rostopic list=> same. it doesn't show the /imu/data_raw
Next post....
