(Jetson Project#7)Launch the MPU6050 IMU Node and Visualize in RViz (3)
Developing Self Driving with Jetson Nano
목록 보기
18/33

Last post, I resolved "rostopic issue"(with an unnecessary thing).
So, let's Visualizing IMU data!
- First terminal
roscore- Second terminal
roslaunch mpu6050_driver mpu6050.launch- Third terminal
rostopic echo /imu/data_raw- Last terminal
rviz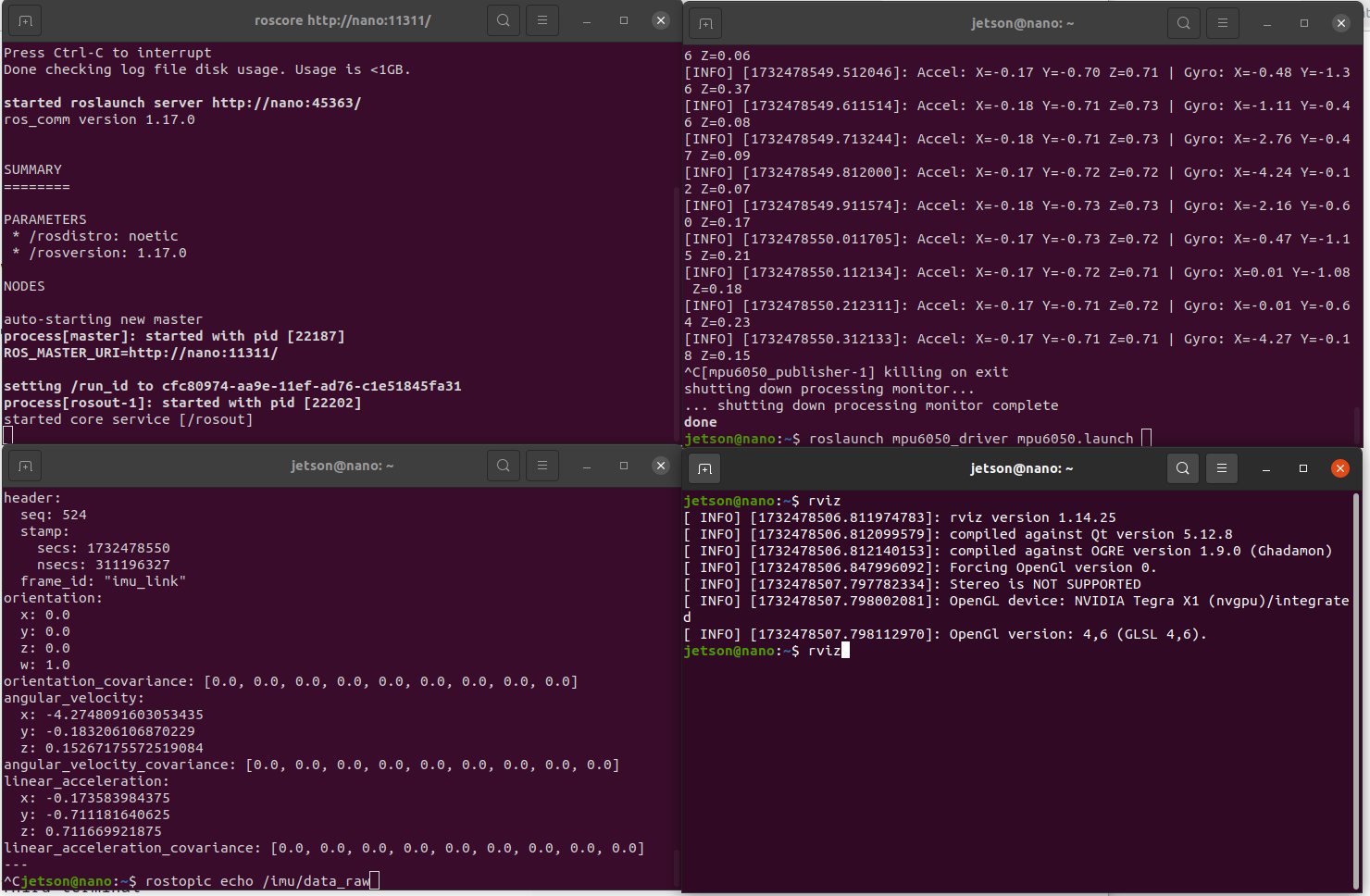
In rviz,
1) Set the "Fixed Frame" to "imu_link"
2) Click "Add" button
3) In the "By topic" tab, Select "Imu" and "OK"
Now, you can see the below.

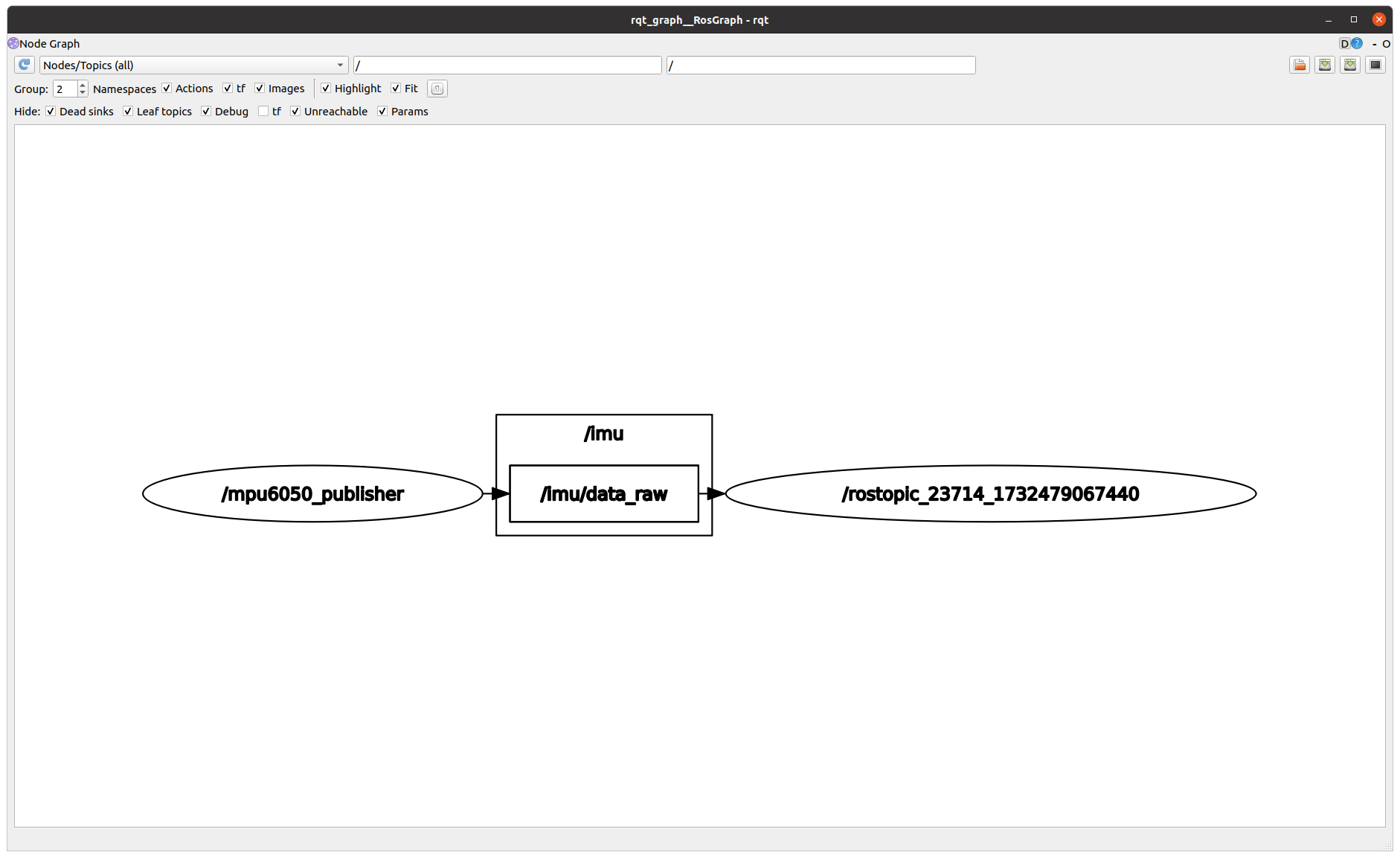
- If want Verification all current node.
Use rqt_graph to visualize the TF tree.
rosrun rqt_graph rqt_graphEnsure that imu_link is correctly connected to base_link.

..