(Jetson Project#8) Integrate IMU Data with Robot's TF Tree
Developing Self Driving with Jetson Nano
For accurate localization and navigation, it's essential to correctly configure the TF (transform) frames in ROS.
6.1. Create a TF Broadcaster Node (Optional)
If your robot model requires specific TF frames (e.g., linking imu_link to base_link), you can create a TF broadcaster.
1.Navigate to Your ROS Package's Scripts Directory:
cd ~/catkin_ws/src/mpu6050_driver/scripts
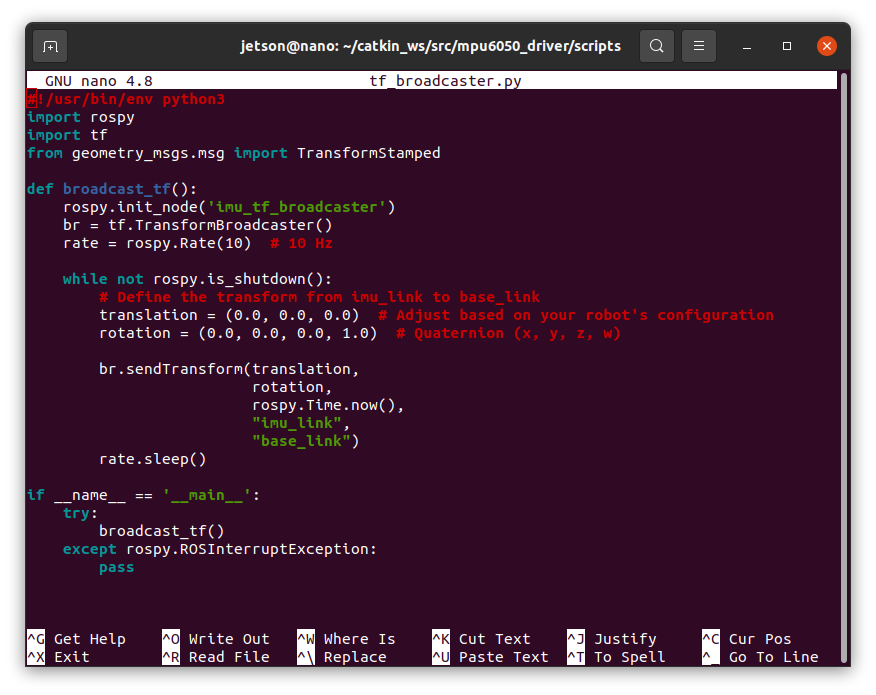
2. Create the tf_broadcaster.py Script:
nano tf_broadcaster.py3. Add the Following Content:
#!/usr/bin/env python3
import rospy
import tf
from geometry_msgs.msg import TransformStamped
def broadcast_tf():
rospy.init_node('imu_tf_broadcaster')
br = tf.TransformBroadcaster()
rate = rospy.Rate(10) # 10 Hz
while not rospy.is_shutdown():
# Define the transform from imu_link to base_link
translation = (0.0, 0.0, 0.0) # Adjust based on your robot's configuration
rotation = (0.0, 0.0, 0.0, 1.0) # Quaternion (x, y, z, w)
br.sendTransform(translation,
rotation,
rospy.Time.now(),
"imu_link",
"base_link")
rate.sleep()
if __name__ == '__main__':
try:
broadcast_tf()
except rospy.ROSInterruptException:
pass
Explanation:
This node broadcasts a static transform between base_link and imu_link.
Adjust translation and rotation based on the physical mounting of the MPU6050 on your robot.
4. Make the Script Executable:
chmod +x tf_broadcaster.py5. Add to Launch File:
- Edit mpu6050.launch:
nano ~/catkin_ws/src/mpu6050_driver/launch/mpu6050.launch
- Add the TF Broadcaster Node:
<launch>
<node name="mpu6050_publisher" pkg="mpu6050_driver" type="mpu6050_publisher.py" output="screen"/>
<node name="imu_tf_broadcaster" pkg="mpu6050_driver" type="tf_broadcaster.py" output="screen"/>
</launch>
6. Re-launch the IMU Node with TF Broadcaster && rviz:
- First terminal:
roslaunch mpu6050_driver mpu6050.launch- Second terminal:
rviz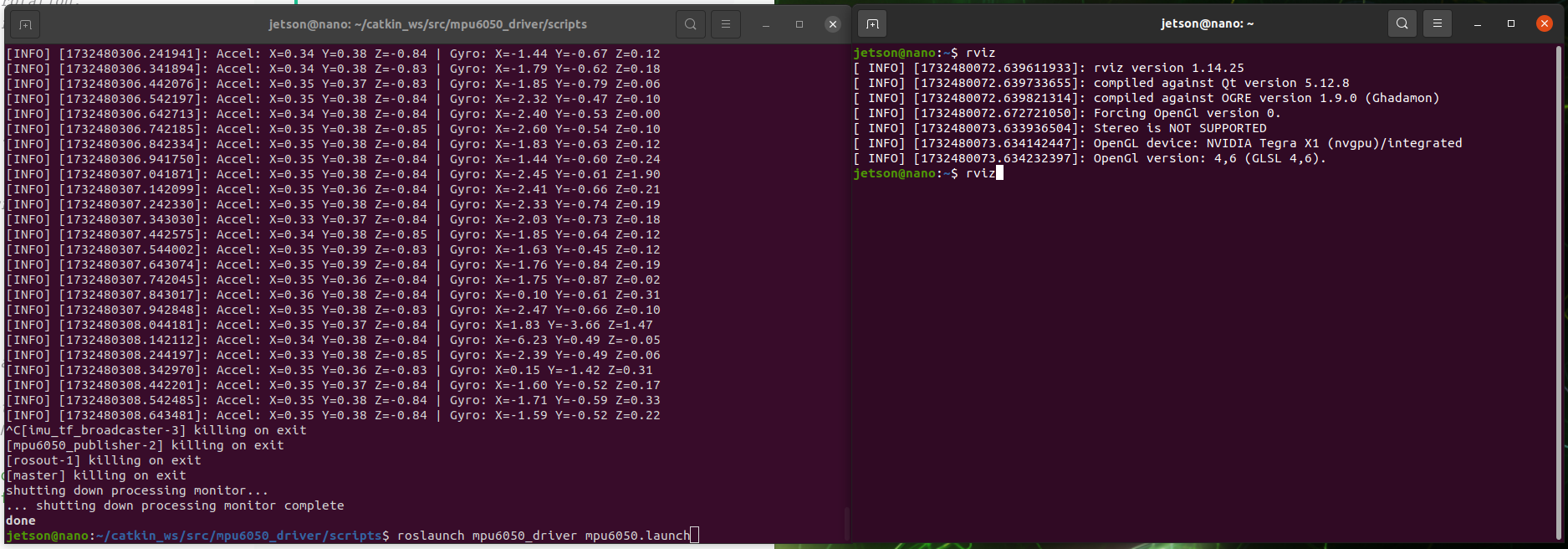
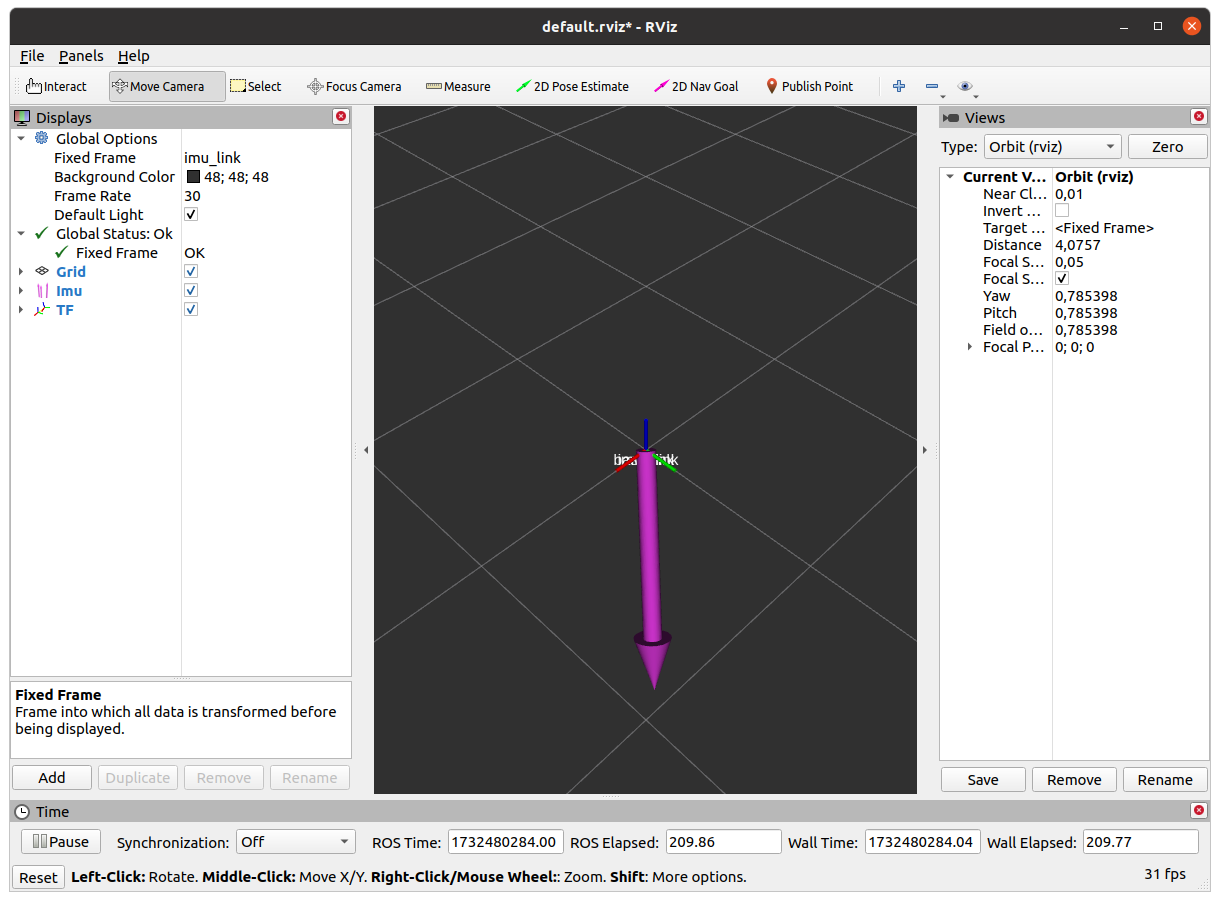
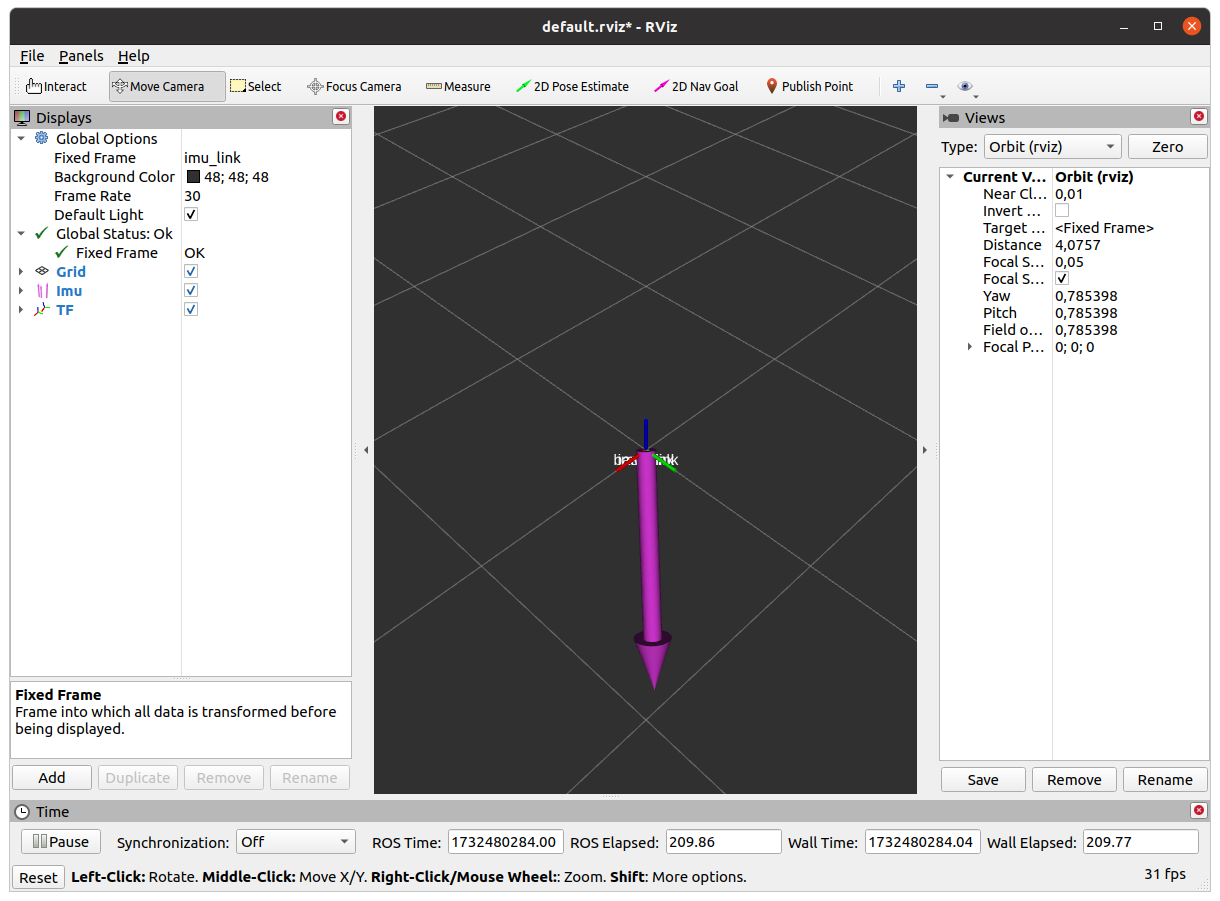
*In RViz: Add the "TF" display. Add "imu", change "Fixed Frame" map to "imu_link"
Ensure that the transform between base_link and imu_link is correctly represented.
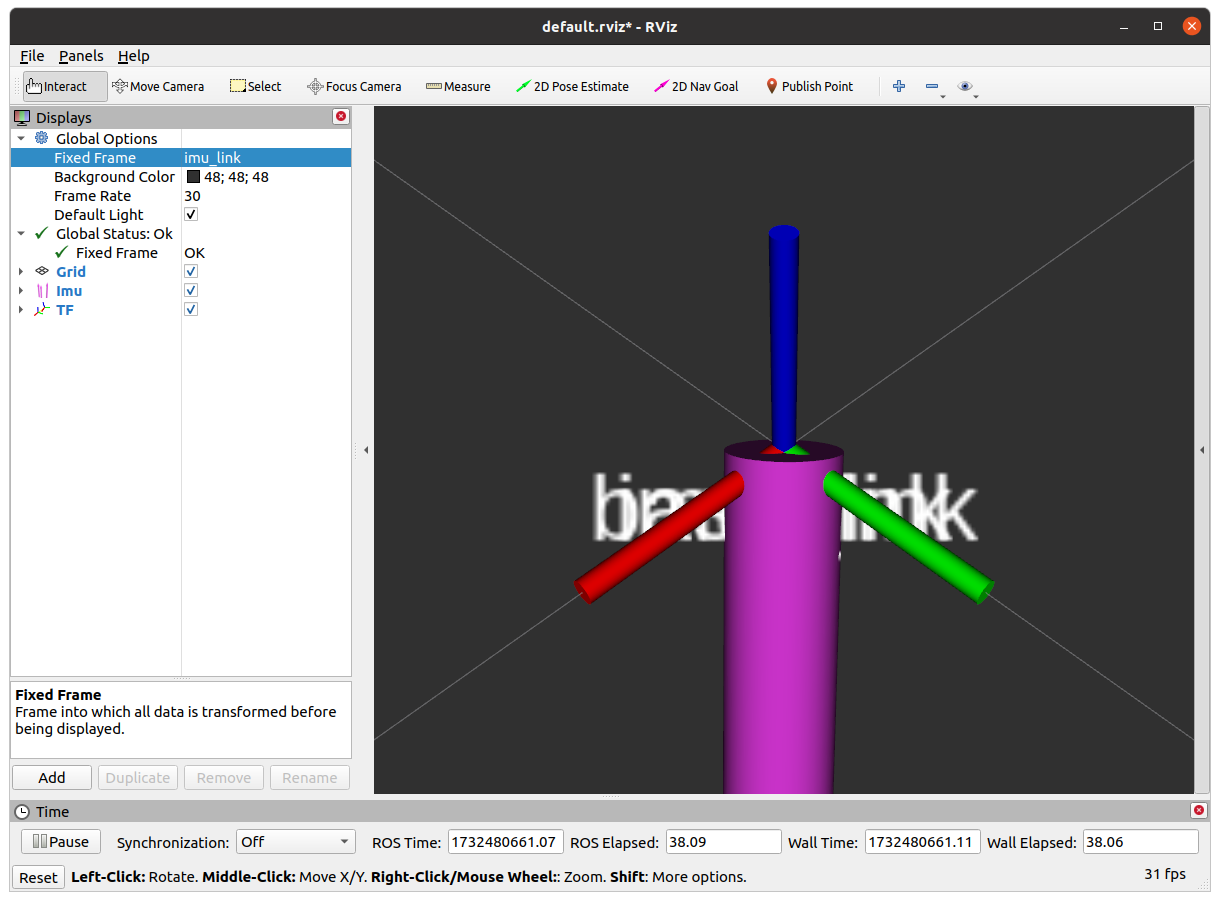
can see that base_link and imu_link is correctly represented
7. If need, Calibration
Static Calibration:
- Place the MPU6050 on a flat, stable surface.
- Record the zero-offsets for accelerometer and gyroscope.
- Update the mpu6050_publisher.py script with these calibration values.
8. Automate Node Launching
Create a master launch file that starts all necessary nodes (RPLIDAR, MPU6050, TF broadcaster, etc.) together.
1) Create a New ROS Package (Optional):
- If you prefer organizing all launch files in one package:
cd ~/catkin_ws/src
catkin_create_pkg robot_bringup rospy2) Create the Master Launch File:
mkdir -p ~/catkin_ws/src/robot_bringup/launch
nano ~/catkin_ws/src/robot_bringup/launch/bringup.launch3) Add the Following Content:
<launch>
<!-- Launch RPLIDAR -->
<include file="$(find rplidar_ros)/launch/rplidar_a1.launch" />
<!-- Launch MPU6050 IMU -->
<include file="$(find mpu6050_driver)/launch/mpu6050.launch" />
<!-- Add other necessary nodes here -->
</launch>
4) Launch All Nodes Together:
roslaunch robot_bringup bringup.launch
9. Monitoring and Debugging
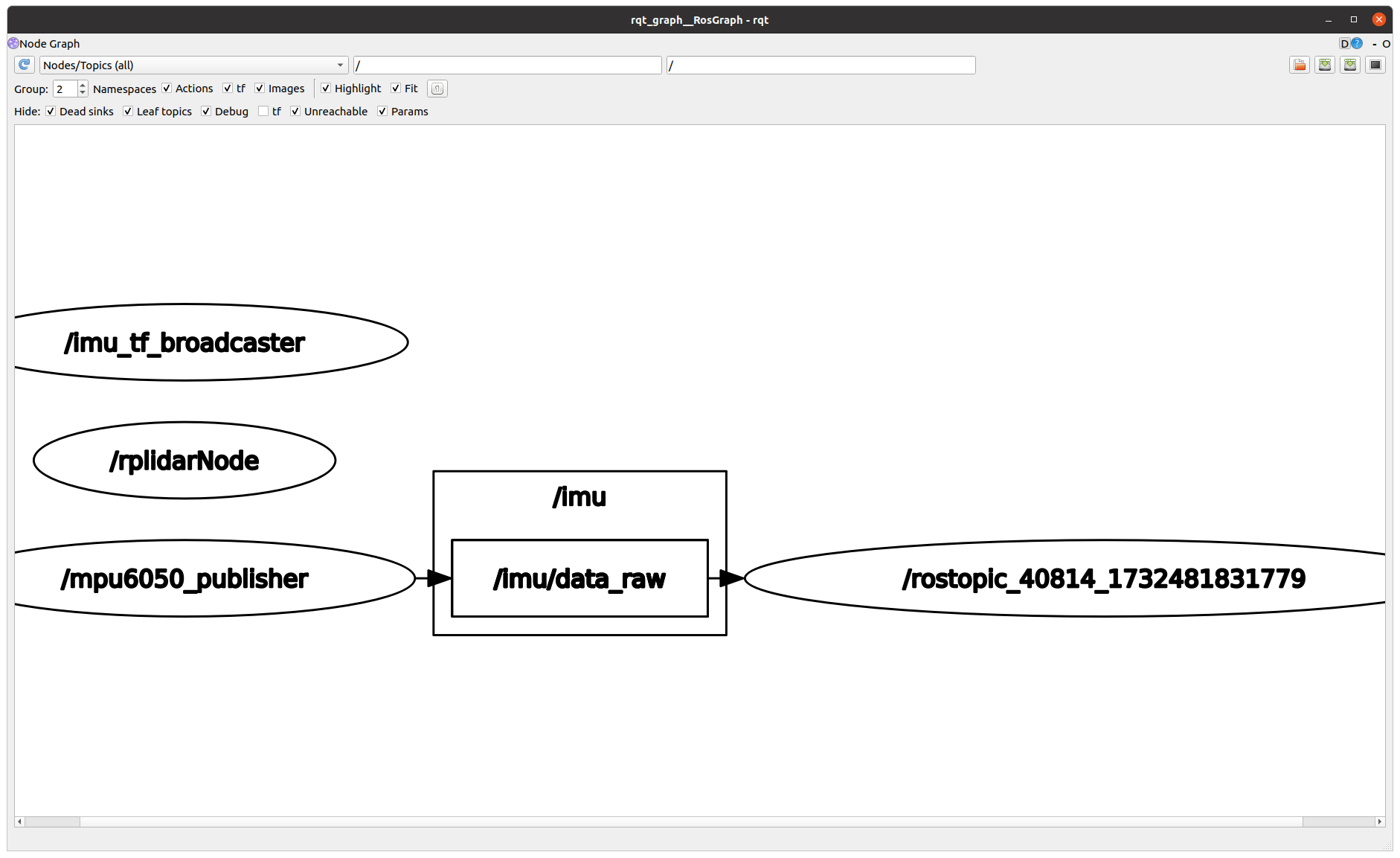
- Use rqt_graph to Visualize Node Connections:
rosrun rqt_graph rqt_graph
10. Maintain Security and Permissions
-
Avoid Running ROS Nodes with sudo: Running ROS nodes as the root user can cause permission issues and is generally discouraged.
-
Ensure User is in the dialout Group:
To access serial ports without sudo:
sudo usermod -a -G dialout $USER