
서문
어쩌다보니 ROS 관련 대회에 나가게되어 ROS를 공부하기 시작했다.
공부하며 배운 것들을 정리해보기 위해 글로 써본다.
참고자료
https://docs.ros.org/en/humble/ : ROS2 Humble 공식 문서.
https://wiki.ros.org/ : ROS wiki.
https://cafe.naver.com/openrt : 오픈 로보틱스 커뮤니티 카페.
https://www.ros.org/ : ROS 홈페이지.
시작하며
ROS는 Robot Operating System의 약자로 말 그대로 로봇 운영체제이다.
Amazon, Openrobotics, Microsoft, Canonical 등 기업들도 참여하는 오픈소스 프로젝트로서 빠른 로봇 개발을 위한 개발킷이며 운영체제라는 말과는 조금 다르게 로봇 하드웨어와 기존 운영체제/프로그램과 연동을 도와주는 Middleware의 느낌이 강했다.
필자는 ROS2의 최신 버전인 Humble을 Ubuntu 22.04.1 LTS에 설치하여 사용할 것이다.
설치
설치환경 설정
Windows에서 지원해주는 Linux Kernel인 WSL을 이용해 Ubuntu를 설치하여도 되고 듀얼부팅으로 Ubuntu를 깔아도 좋다.
어떤식으로든 Ubuntu 22.04.1 LTS만 깔면 OK!
WSL은 Microsoft Store에서 Ubuntu 22.04.1 LTS를 설치할 수 있다.
locale 확인
ROS 설치를 위해선 Ubuntu에서 UTF-8이 지원되는 언어셋을 사용 중이어야 한다.
다음 명령어를 터미널에 입력하여 확인해보자!
locale UTF-8이라는 문구가 보인다면 진행해도 좋다.
아니라면 다음 명령어들로 UTF-8 지원 언어셋으로 바꾸어보자.
sudo apt update && sudo apt install locales
sudo locale-gen ko_KR ko_KR.UTF-8
sudo update-locale LC_ALL=ko_KR.UTF-8 LANG=ko_KR.UTF-8
export LANG=ko_KR.UTF-8Repository 추가
ROS 패키지들을 설치하기위해 APT 패키지 관리자에 ROS Repository를 추가해줘야 한다.
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null설치
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop위 명령어로 설치가 완료되면 설치 스크립트를 실행해주어야 한다.
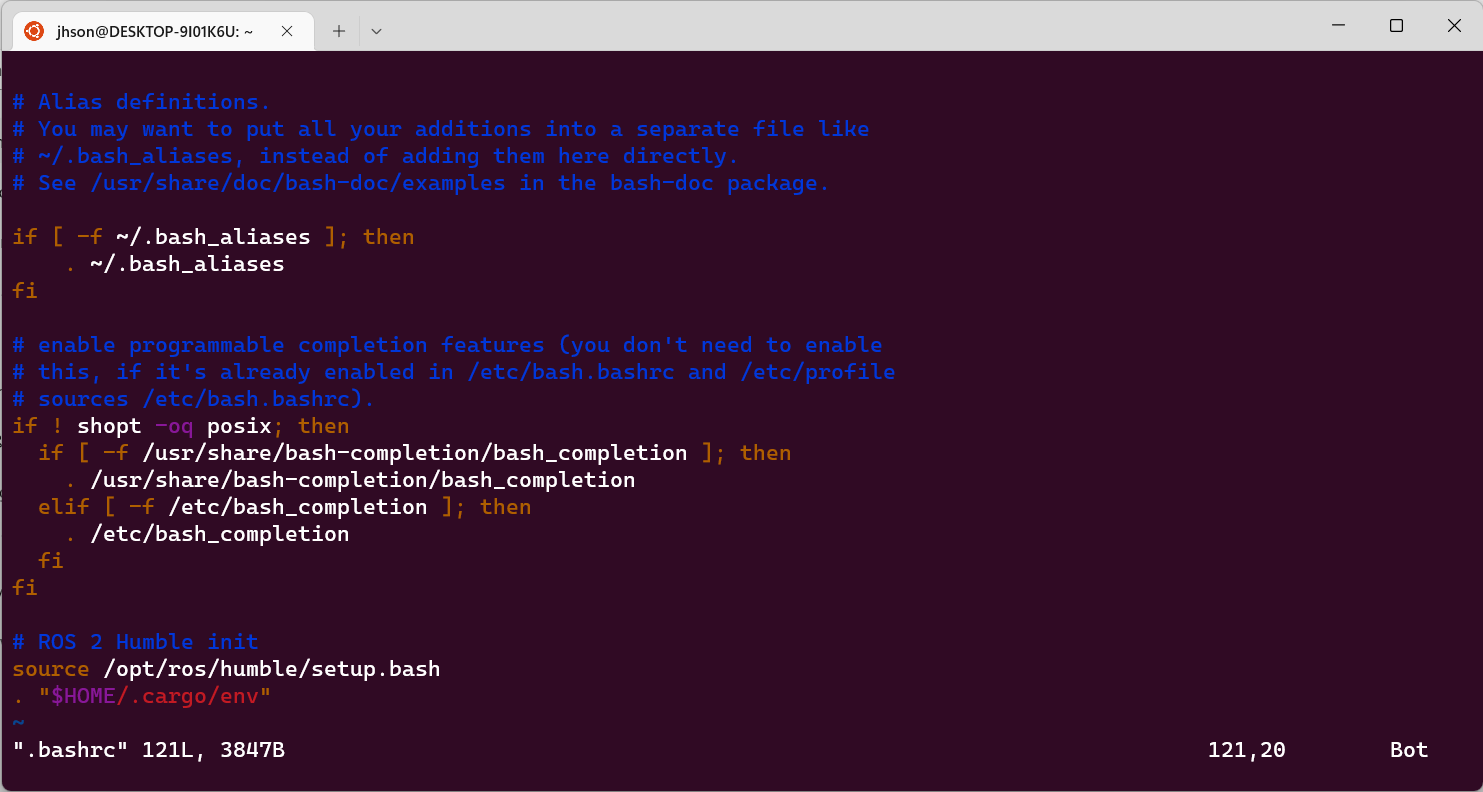
source /opt/ros/humble/setup.bashROS 사용을 위해 매번 쳐주긴 번거로우니 터미널 실행 시 자동으로 적용되도록 bash 쉘 설정파일인 .bashrc에 추가해주자.
cd ~
vim .bashrc 텍스트에디터로 연 .bashrc의 마지막줄에 추가해주면 된다.
설치 끝!
혹시 VIM 에디터에 갇혔다면 ESC키를 누른뒤 :wq를 입력하면 나갈 수 있다
다음 편 예고
ROS 튜토리얼 패키지인 Turtlesim으로 ROS알아보기

꼭 04.1이어야 하나요?
04.2에는 안깔리나요?