[RGB-D (depth camera)를 이용한 vSLAM]
😊RGB-D vSLAM Example in matlab official
목표: RGB-D(=뎁스카메라)를 이용한 3D Slam을 매틀랩에서 구현. 예제 따라가기
1.Methodology of 3D Slam by RGB-D camera
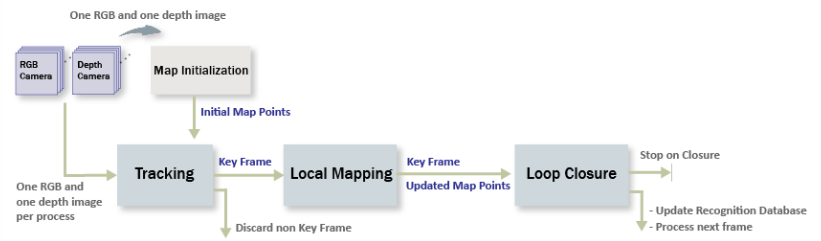
SLAM flow는 스테레오 카메라와 유사한 구조이다.
1.Map initialize: RGB image + Depth image로 3D 공간구성 시작
2.Tracking: 여러장의 사진을 찍으며, 키프레임간의 특징점의 변화를 계산
3.Local Mapping: 새로운 키프레임이 들어올때마다, map point를 계산하여 mapping
4.Loop closure: 같은 공간에 다시 돌아올때, 이전에 왔던 공간임을 인지하여, 오차(drift)보정
⚠️예제를 불러와도 헬퍼함수가 등록이 안되는 경우가 있었다. 이 경우 빈 함수파일을 만들어주고, 헬퍼함수 내용을 집어넣어주자.
1. 데이터셋 다운로드 및 디렉토리 설정
baseDownloadURL = "https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz";
dataFolder = fullfile(tempdir, 'tum_rgbd_dataset', filesep);
options = weboptions('Timeout', Inf);
tgzFileName = [dataFolder, 'fr3_office.tgz'];
folderExists = exist(dataFolder, 'dir');
% Create a folder in a temporary directory to save the downloaded file
if ~folderExists
mkdir(dataFolder);
disp('Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.')
websave(tgzFileName, baseDownloadURL, options);
% Extract contents of the downloaded file
disp('Extracting fr3_office.tgz (1.38 GB) ...')
untar(tgzFileName, dataFolder);
end
imageFolder = [dataFolder, 'rgbd_dataset_freiburg3_long_office_household/'];imgFolderColor = [imageFolder,'rgb/'];
imgFolderDepth = [imageFolder,'depth/'];
imdsColor = imageDatastore(imgFolderColor);
imdsDepth = imageDatastore(imgFolderDepth);2. image마다 (RGB정보, Depth정보) 동기화 및 테스트 이미지 출력
🟢 색상정보와 깊이정보는 이미지에 동기화되어서 저장되는것이 아니라, 분리되어 저장되어있다. Timestamp 기준으로 이미지와 (색상,깊이) 정보를 동기화 시켜주자.
% Load time stamp data of color images
timeColor = helperImportTimestampFile([imageFolder, 'rgb.txt']);
% Load time stamp data of depth images
timeDepth = helperImportTimestampFile([imageFolder, 'depth.txt']);
% Align the time stamp
indexPairs = helperAlignTimestamp(timeColor, timeDepth);
% Select the synchronized image data
imdsColor = subset(imdsColor, indexPairs(:, 1));
imdsDepth = subset(imdsDepth, indexPairs(:, 2));
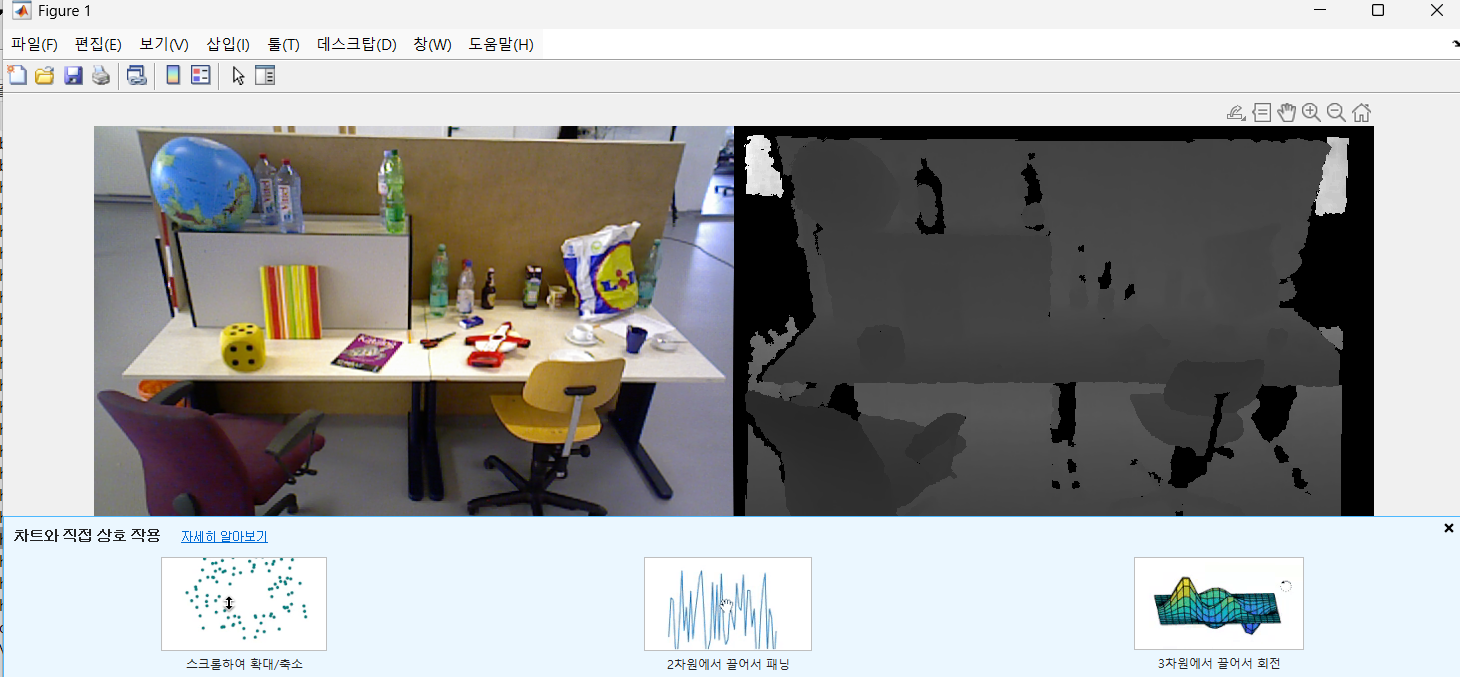
% Inspect the first RGB-D image
currFrameIdx = 1;
currIcolor = readimage(imdsColor, currFrameIdx);
currIdepth = readimage(imdsDepth, currFrameIdx);
imshowpair(currIcolor, currIdepth, "montage");3.Map initialize
🟢Map에서 SLAM을 하기위한 초기 설정위치이다. 특징점 추출과 관련된 파라미터들(scaleFactor, numLevels, numpoints등)을 설정한다.
% Set random seed for reproducibility
rng(0);
% Create a cameraIntrinsics object to store the camera intrinsic parameters.
% The intrinsics for the dataset can be found at the following page:
% https://vision.in.tum.de/data/datasets/rgbd-dataset/file_formats
focalLength = [535.4, 539.2]; % in units of pixels
principalPoint = [320.1, 247.6]; % in units of pixels
imageSize = size(currIcolor,[1,2]); % in pixels [mrows, ncols]
depthFactor = 5e3;
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
% Detect and extract ORB features from the color image
scaleFactor = 1.2;
numLevels = 8;
numPoints = 1000;
[currFeatures, currPoints] = helperDetectAndExtractFeatures(currIcolor, scaleFactor, numLevels, numPoints);
initialPose = rigidtform3d();
[xyzPoints, validIndex] = helperReconstructFromRGBD(currPoints, currIdepth, intrinsics, initialPose, depthFactor);4.Loop closure 데이터베이스 구축
🟢같은 위치에 되돌아왔을때, 새로운곳이라고 인지하지 않아야 SLAM이 정확하다. 이는 bof라는 시각적어휘 기법(비유: 이곳의 나무,음식점등 특징이있는 특징점들을 기억하고 메모해두자!)을 이용한다.
이 bof정보들을 저장할 데이터베이스를 구축하는 과정이다.
% Load the bag of features data created offline
bofData = load("bagOfFeaturesDataSLAM.mat");
% Initialize the place recognition database
loopDatabase = invertedImageIndex(bofData.bof, SaveFeatureLocations=false);
% Add features of the first key frame to the database
currKeyFrameId = 1;
addImageFeatures(loopDatabase, currFeatures, currKeyFrameId);5.3D Map point 및 RGB이미지를 저장할 디렉토리 구축 및 SLAM테스트
🟢3D Map point, keyFrame을 저장할 디렉토리를 만들어준다.
Keyframe에서 3D Map point를 추출하여 저장한다.(Keyframe도 저장)
특정 3D Map point 점군마다 깊이정보 및 카메라가 바라보는 방향도 저장한다.
테스트용으로 첫 키프레임의 3D SLAM 결과를 시각화해본다.
3D Mapoint : SLAM결과로서 보이는 점들의 집합
Key Frame : 특징점이 가장 많이 보이는 RGB이미지. SLAM에서 참고하는 이미지들
% Create an empty imageviewset object to store key frames
vSetKeyFrames = imageviewset;
% Create an empty worldpointset object to store 3-D map points
mapPointSet = worldpointset;
% Add the first key frame
vSetKeyFrames = addView(vSetKeyFrames, currKeyFrameId, initialPose, Points=currPoints,...
Features=currFeatures.Features);
% Add 3-D map points
[mapPointSet, rgbdMapPointsIdx] = addWorldPoints(mapPointSet, xyzPoints);
% Add observations of the map points
mapPointSet = addCorrespondences(mapPointSet, currKeyFrameId, rgbdMapPointsIdx, validIndex);
% Update view direction and depth
mapPointSet = updateLimitsAndDirection(mapPointSet, rgbdMapPointsIdx, vSetKeyFrames.Views);
% Update representative view
mapPointSet = updateRepresentativeView(mapPointSet, rgbdMapPointsIdx, vSetKeyFrames.Views);
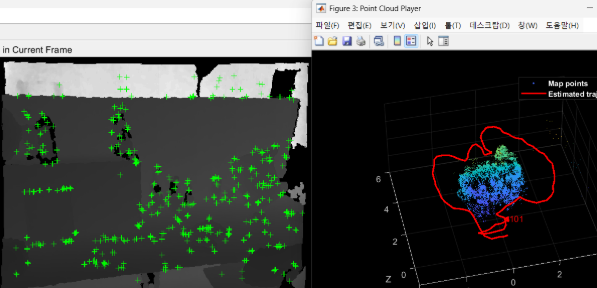
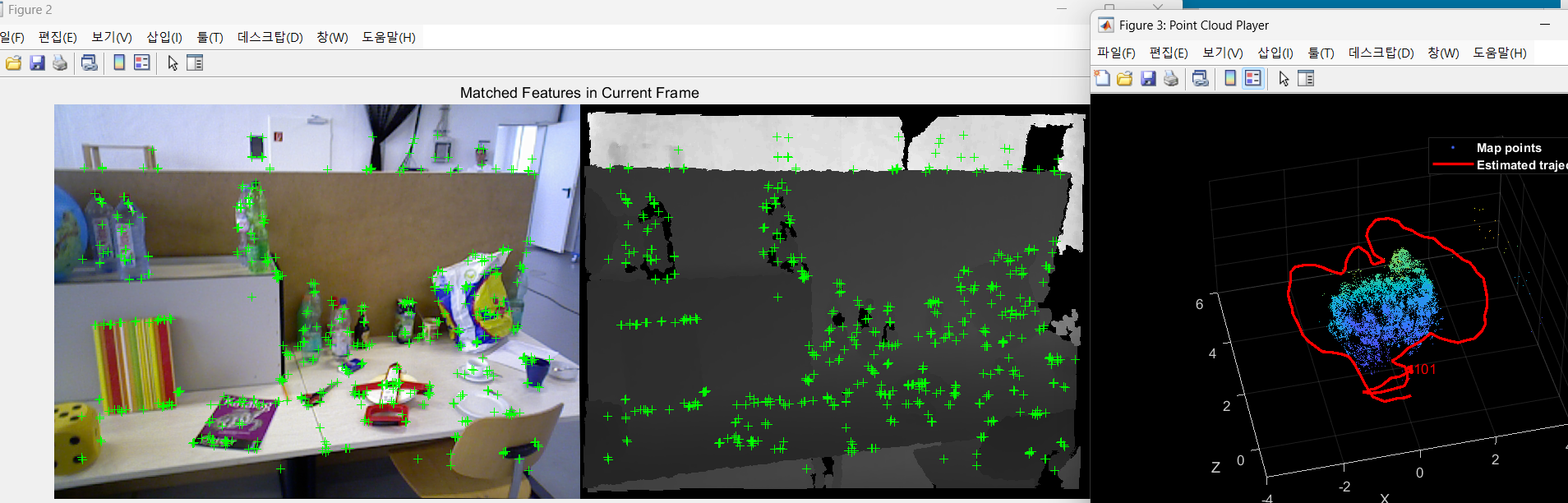
% Visualize matched features in the first key frame
featurePlot = helperVisualizeMatchedFeaturesRGBD(currIcolor, currIdepth, currPoints(validIndex));
% Visualize initial map points and camera trajectory
xLim = [-4 4];
yLim = [-3 1];
zLim = [-1 6];
mapPlot = helperVisualizeMotionAndStructure(vSetKeyFrames, mapPointSet, xLim, yLim, zLim);
% Show legend
showLegend(mapPlot);6.Tracking
🟢카메라가 움직이면서 새로운 사진이 찍히면, 이전 키프레임에 있던 특징점들과 비교하며, 카메라의 상대위치와 포즈(orientation)을 추정한다.
또한, 추가적으로 특징점들을 파악하여 결과값을 미세조정도 한다.
Kanade-Lucas-Tomasi(vision.PointTracker) : 특징점의 변화로 카메라 이동 추정하는 알고리즘
PnP : 서로 대응되는 (2D 좌표 - 3D좌표) 쌍을 이용하여 카메라의 위치와 방향(포즈) 추정
BundleAdjustmentMotion: SLAM결과값 보정
% ViewId of the last key frame
lastKeyFrameId = currKeyFrameId;
% Index of the last key frame in the input image sequence
lastKeyFrameIdx = currFrameIdx;
% Indices of all the key frames in the input image sequence
addedFramesIdx = lastKeyFrameIdx;
currFrameIdx = 2;
isLoopClosed = false;% Main loop
isLastFrameKeyFrame = true;
% Create and initialize the KLT tracker
tracker = vision.PointTracker(MaxBidirectionalError = 5);
initialize(tracker, currPoints.Location(validIndex, :), currIcolor);
while currFrameIdx < numel(imdsColor.Files)
currIcolor = readimage(imdsColor, currFrameIdx);
currIdepth = readimage(imdsDepth, currFrameIdx);
[currFeatures, currPoints] = helperDetectAndExtractFeatures(currIcolor, scaleFactor, numLevels, numPoints);
% Track the last key frame
% trackedMapPointsIdx: Indices of the map points observed in the current left frame
% trackedFeatureIdx: Indices of the corresponding feature points in the current left frame
[currPose, trackedMapPointsIdx, trackedFeatureIdx] = helperTrackLastKeyFrameKLT(tracker, currIcolor, mapPointSet, ...
vSetKeyFrames.Views, currFeatures, currPoints, lastKeyFrameId, intrinsics);
if isempty(currPose) || numel(trackedMapPointsIdx) < 20
currFrameIdx = currFrameIdx + 1;
continue
end
% Track the local map and check if the current frame is a key frame.
% A frame is a key frame if both of the following conditions are satisfied:
%
% 1. At least 20 frames have passed since the last key frame or the
% current frame tracks fewer than 120 map points.
% 2. The map points tracked by the current frame are fewer than 90% of
% points tracked by the reference key frame.
%
% localKeyFrameIds: ViewId of the connected key frames of the current frame
numSkipFrames = 20;
numPointsKeyFrame = 120;
[localKeyFrameIds, currPose, trackedMapPointsIdx, trackedFeatureIdx, isKeyFrame] = ...
helperTrackLocalMap(mapPointSet, vSetKeyFrames, trackedMapPointsIdx, ...
trackedFeatureIdx, currPose, currFeatures, currPoints, intrinsics, scaleFactor, ...
isLastFrameKeyFrame, lastKeyFrameIdx, currFrameIdx, numSkipFrames, numPointsKeyFrame);
% Visualize matched features
updatePlot(featurePlot, currIcolor, currIdepth, currPoints(trackedFeatureIdx));
if ~isKeyFrame
currFrameIdx = currFrameIdx + 1;
isLastFrameKeyFrame = false;
continue
else
% Match feature points between the stereo images and get the 3-D world positions
[xyzPoints, validIndex] = helperReconstructFromRGBD(currPoints, currIdepth, ...
intrinsics, currPose, depthFactor);
[untrackedFeatureIdx, ia] = setdiff(validIndex, trackedFeatureIdx);
xyzPoints = xyzPoints(ia, :);
isLastFrameKeyFrame = true;
end
% Update current key frame ID
currKeyFrameId = currKeyFrameId + 1;7.Local Mapping
🟢Mapping(Map point 생성)을 수행하는 기준을 설명. Mapping은 새로운 키프레임이 추가될때마다 수행됨. 새로운 키 프레임은 이전의 키프레임의 특징점과 현재 이미지의 특징점 사이의 차이가 커지면 생성이됨.
% Add the new key frame
[mapPointSet, vSetKeyFrames] = helperAddNewKeyFrame(mapPointSet, vSetKeyFrames, ...
currPose, currFeatures, currPoints, trackedMapPointsIdx, trackedFeatureIdx, localKeyFrameIds);
% Remove outlier map points that are observed in fewer than 3 key frames
if currKeyFrameId == 2
triangulatedMapPointsIdx = [];
end
[mapPointSet, trackedMapPointsIdx] = ...
helperCullRecentMapPointsRGBD(mapPointSet, trackedMapPointsIdx, triangulatedMapPointsIdx, ...
rgbdMapPointsIdx);
% Add new map points computed from disparity
[mapPointSet, rgbdMapPointsIdx] = addWorldPoints(mapPointSet, xyzPoints);
mapPointSet = addCorrespondences(mapPointSet, currKeyFrameId, rgbdMapPointsIdx, ...
untrackedFeatureIdx);
% Create new map points by triangulation
minNumMatches = 10;
minParallax = 1;
[mapPointSet, vSetKeyFrames, triangulatedMapPointsIdx, rgbdMapPointsIdx] = helperCreateNewMapPointsStereo( ...
mapPointSet, vSetKeyFrames, currKeyFrameId, intrinsics, scaleFactor, minNumMatches, minParallax, ...
untrackedFeatureIdx, rgbdMapPointsIdx);
% Update view direction and depth
mapPointSet = updateLimitsAndDirection(mapPointSet, [triangulatedMapPointsIdx; rgbdMapPointsIdx], ...
vSetKeyFrames.Views);
% Update representative view
mapPointSet = updateRepresentativeView(mapPointSet, [triangulatedMapPointsIdx; rgbdMapPointsIdx], ...
vSetKeyFrames.Views);
% Local bundle adjustment
[mapPointSet, vSetKeyFrames, triangulatedMapPointsIdx, rgbdMapPointsIdx] = ...
helperLocalBundleAdjustmentStereo(mapPointSet, vSetKeyFrames, ...
currKeyFrameId, intrinsics, triangulatedMapPointsIdx, rgbdMapPointsIdx);
% Visualize 3-D world points and camera trajectory
updatePlot(mapPlot, vSetKeyFrames, mapPointSet);
% Set the feature points to be tracked
[~, index2d] = findWorldPointsInView(mapPointSet, currKeyFrameId);
setPoints(tracker, currPoints.Location(index2d, :));8.Loop Closure
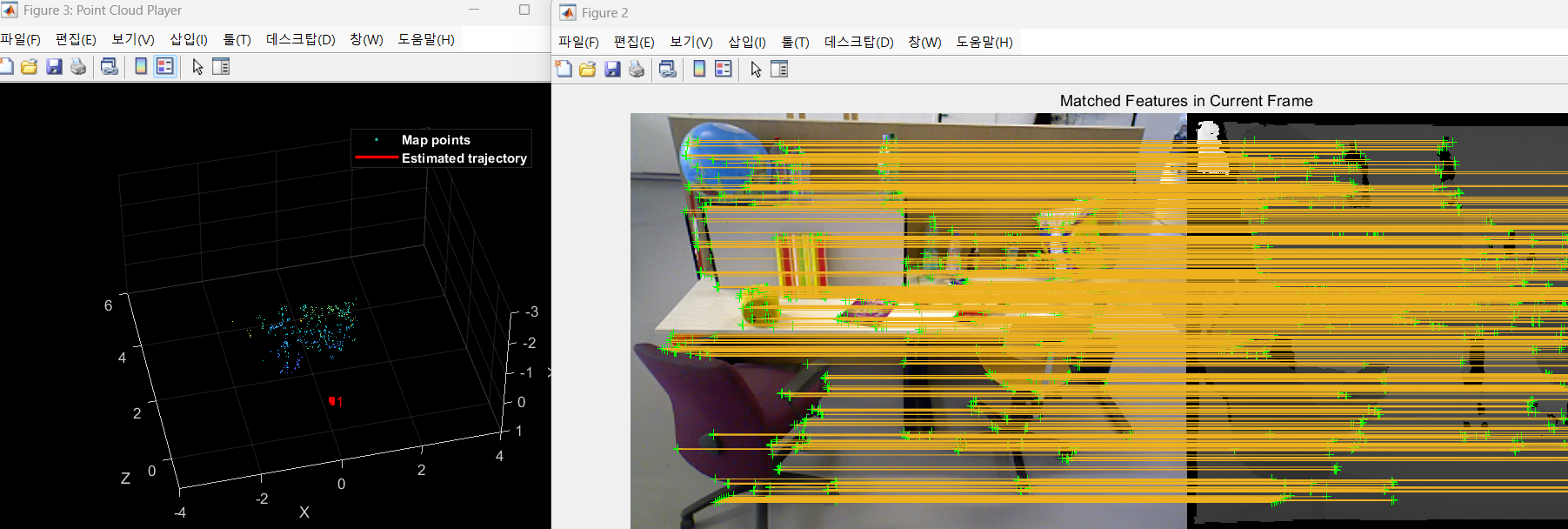
🟢방문했던 위치로 돌아왔을때, 새로운 위치로 인식하지 않도록, 데이터베이스에서 확인해서 SLAM결과값 보정.
인접한 프레임간 비매칭된 포인트들도 연결하여 SLAM 과정에 이용.
매칭된 포인트 : 키프레임 앞뒤로 1개의 프레임(총 3개의 프레임그룹)에서 특징점위치가 크게 변하지 않은것들은 매칭된 포인트이다.
% Check loop closure after some key frames have been created
if currKeyFrameId > 20
% Minimum number of feature matches of loop edges
loopEdgeNumMatches = 120;
% Detect possible loop closure key frame candidates
[isDetected, validLoopCandidates] = helperCheckLoopClosureT(vSetKeyFrames, currKeyFrameId, ...
loopDatabase, currIcolor, loopEdgeNumMatches);
if isDetected
% Add loop closure connections
maxDistance = 0.1;
[isLoopClosed, mapPointSet, vSetKeyFrames] = helperAddLoopConnectionsStereo(...
mapPointSet, vSetKeyFrames, validLoopCandidates, currKeyFrameId, ...
currFeatures, currPoints, loopEdgeNumMatches, maxDistance);
end
end
% If no loop closure is detected, add current features into the database
if ~isLoopClosed
addImageFeatures(loopDatabase, currFeatures, currKeyFrameId);
end
% Update IDs and indices
lastKeyFrameId = currKeyFrameId;
lastKeyFrameIdx = currFrameIdx;
addedFramesIdx = [addedFramesIdx; currFrameIdx]; %#ok<AGROW>
currFrameIdx = currFrameIdx + 1;
end % End of main loop9.Optimization of Pose Graph
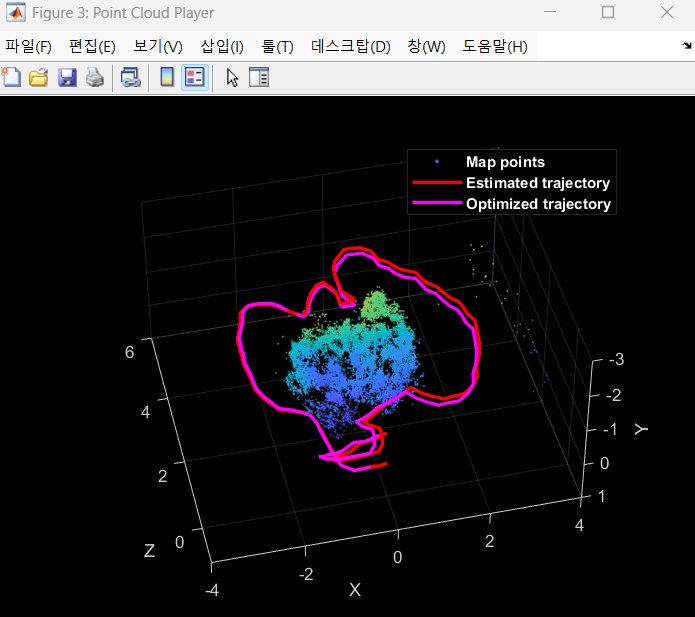
🟢최소 매칭 포인트수 (minNumMatches) 보다 적은 매칭을 가진 프레임은 제거하여 필수 그래프(노이즈제거하는 과정)
이 필수그래프를 기반으로 하여 SLAM결과를 미세하게 조정.
최적화된 3D맵포인트의 위치를 업데이트함.(실제 SLAM과정에서 맨처음에는 특징점 많이 찍히다가 OPG과정을 통해 핵심 특징점만 남게됨.)
% Optimize the poses
minNumMatches = 50;
vSetKeyFramesOptim = optimizePoses(vSetKeyFrames, minNumMatches, Tolerance=1e-16);
% Update map points after optimizing the poses
mapPointSet = helperUpdateGlobalMap(mapPointSet, vSetKeyFrames, vSetKeyFramesOptim);
updatePlot(mapPlot, vSetKeyFrames, mapPointSet);
% Plot the optimized camera trajectory
optimizedPoses = poses(vSetKeyFramesOptim);
plotOptimizedTrajectory(mapPlot, optimizedPoses)
% Update legend
showLegend(mapPlot);10. SLAM결과
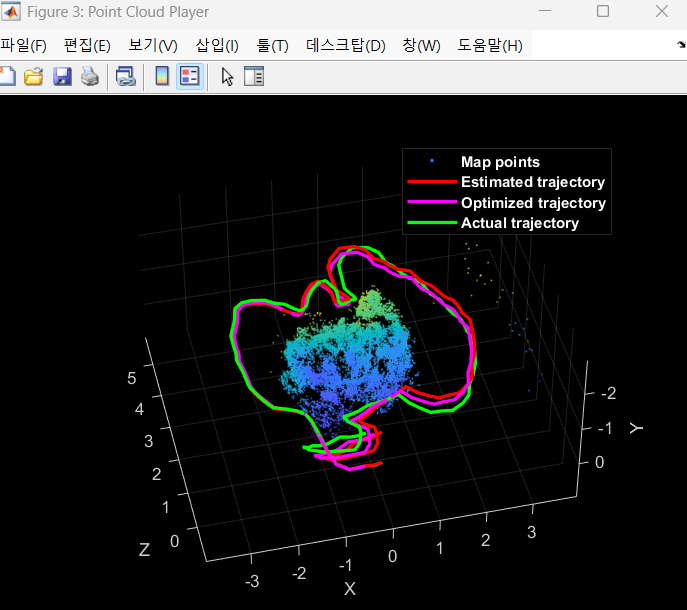
11. GroundTruth와 SLAM결과 비교
🟢프레임마다 카메라의 위치와 방향 정보를 담은 실제 정보와, SLAM을 통해 추정된 카메라의 위치, 방향정보를 비교하여 알고리즘의 정확도를 평가한다.
% Load ground truth
gTruthData = load("orbslamGroundTruth.mat");
gTruth = gTruthData.gTruth;
% Plot the actual camera trajectory
plotActualTrajectory(mapPlot, gTruth(indexPairs(addedFramesIdx, 1)), optimizedPoses);
% Show legend
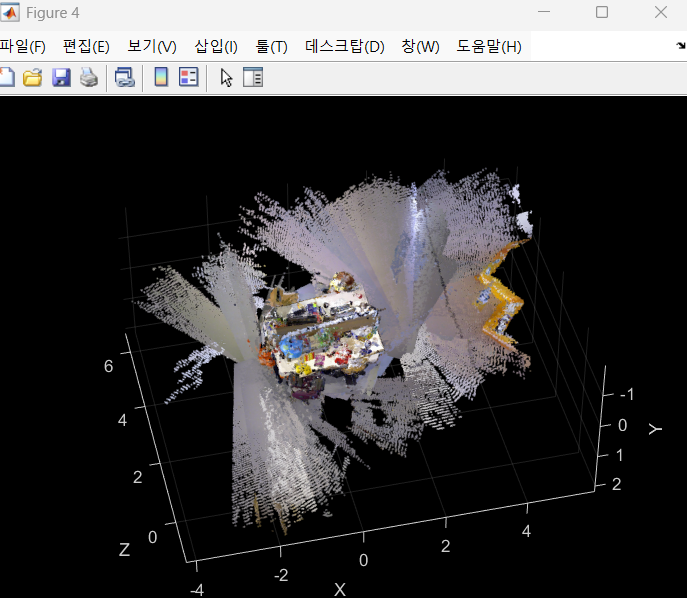
showLegend(mapPlot);12. Dense Reconstruction
🟢카메라 또는 센서로 캡처한 이미지를 사용하여 고밀도 3D 모델을 생성하는 과정. 이 과정은 환경의 세밀한 3D 구조를 재구성하는 데 중점을 두며, 표면의 모든 작은 세부 사항을 포함. SLAM으로 생성된 정보들을 기반으로 공간을 우리가 볼 수 있는 형태로 재구성하는 단계
% Create an array of pointCloud objects to store the world points constructed
% from the key frames
ptClouds = repmat(pointCloud(zeros(1, 3)), numel(addedFramesIdx), 1);
% Ignore image points at the boundary
offset = 40;
[X, Y] = meshgrid(offset:2:imageSize(2)-offset, offset:2:imageSize(1)-offset);
for i = 1: numel(addedFramesIdx)
Icolor = readimage(imdsColor, addedFramesIdx(i));
Idepth = readimage(imdsDepth, addedFramesIdx(i));
[xyzPoints, validIndex] = helperReconstructFromRGBD([X(:), Y(:)], ...
Idepth, intrinsics, optimizedPoses.AbsolutePose(i), depthFactor);
colors = zeros(numel(X), 1, 'like', Icolor);
for j = 1:numel(X)
colors(j, 1:3) = Icolor(Y(j), X(j), :);
end
ptClouds(i) = pointCloud(xyzPoints, Color=colors(validIndex, :));
end
% Concatenate the point clouds
pointCloudsAll = pccat(ptClouds);
figure
pcshow(pointCloudsAll,VerticalAxis="y", VerticalAxisDir="down");
xlabel('X')
ylabel('Y')
zlabel('Z')💡마무리
RGB-D (DepthCamera를 통한 3D SLAM 과정을 알게되었다.)
알아본 결과, 카메라의 이동 및 자세추정단계(Tracking)에서 단순 특징점 사이 이동만을 이용하는것이 아닌, IMU가 여기서 퓨전되면 훨씬 정확한 위치 및 자세추정이 된다는 사실도 찾아보니 알게되었다.
(❗❗현재 포스트에서는 IMU를 이용하지 않고있다❗❗)
추후에 3D카메라와 IMU를 센서퓨전하여 SLAM하는 방식을 Matlab을 통해 해봐야겠다.
데이터셋을 우리껄로 바꿔주면, 내가 원하는 곳의 SLAM을 해볼수 있겠다는 생각이 들었다.
