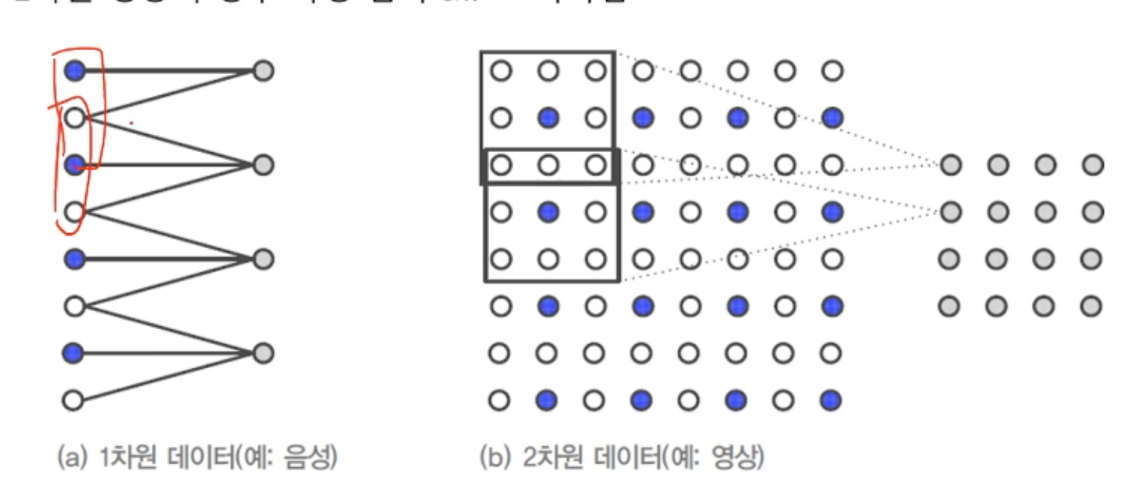
CNN의 특성
- 물체가 이동하면 이동 정보가 특징맵에 그대로 반영
- 병렬분산 구조
큰 보폭에 의한 다운샘플링
- 보폭이 커질수록 출력되는 특징맵 크기가 작아짐
- 다운샘플링을 통해 연산해야할 양이 적어짐
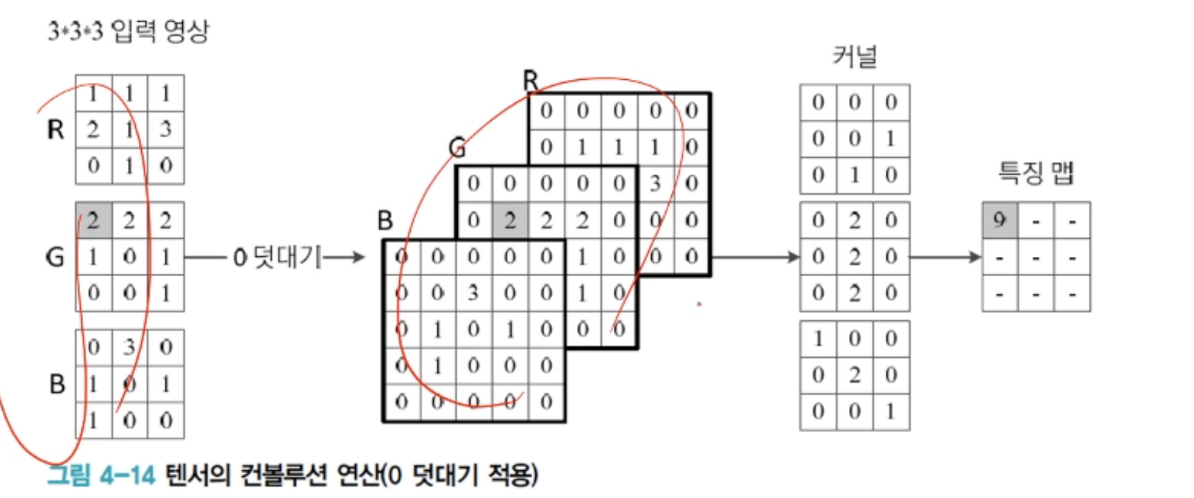
- 3차원 영상을 2차원의 특징맵으로도 정리
- 4차원 영상을 3차원으로도 정리
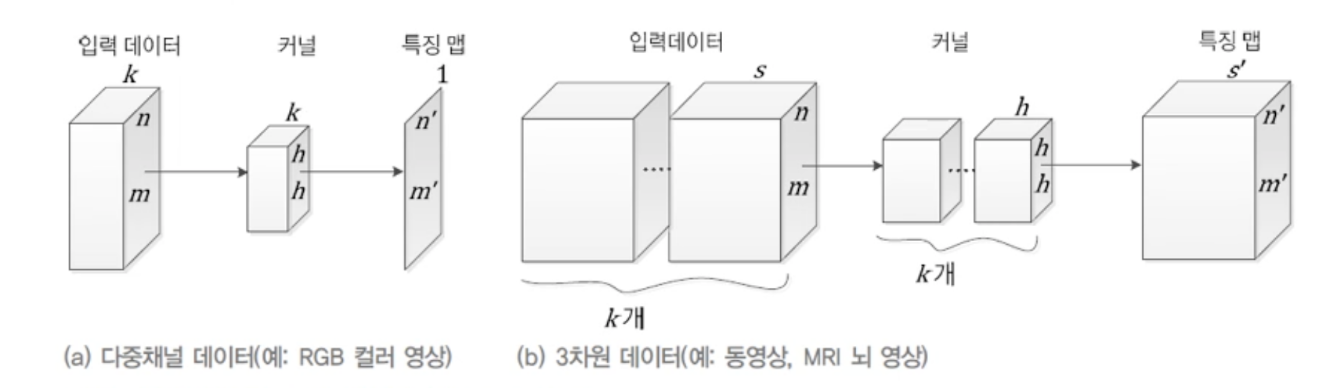
- 입력데이터 -> 입력데이터 차원과 같은 차원의 커널 -> 한차원 낮은 특징맵
풀링(Pooling) 연산
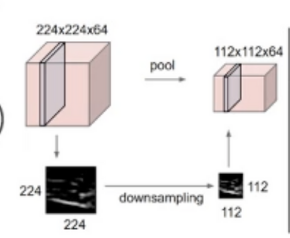
- 특징은 유지하면서 다운샘플링
- 영역의 통계적 대표성을 추출
빌딩 블록
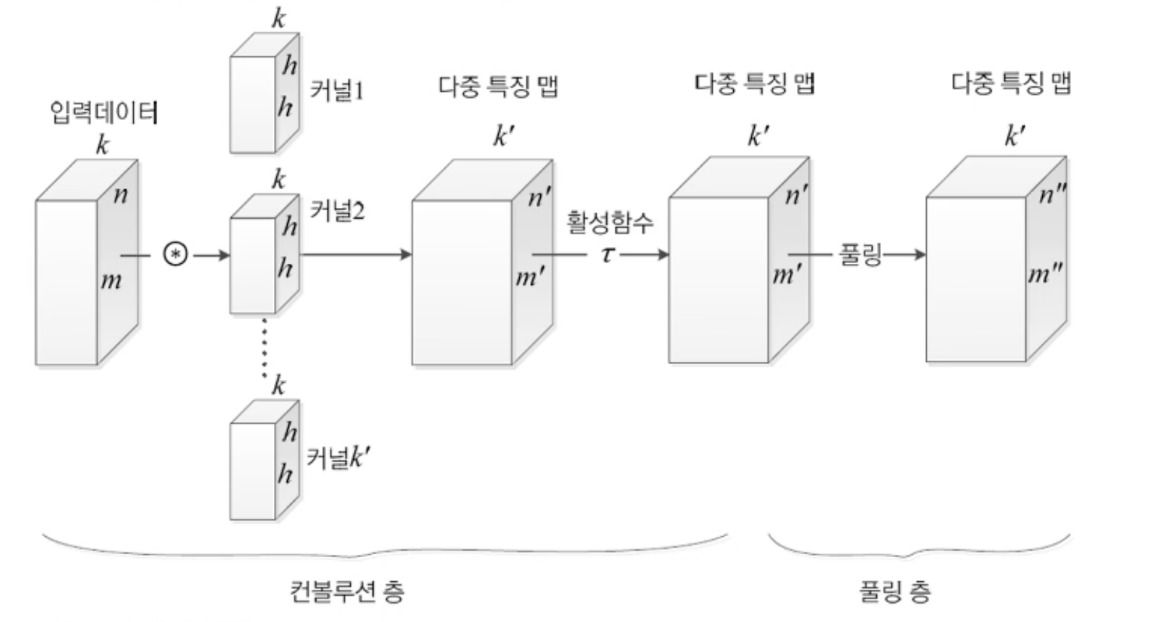
컨벌루션 -> 활성함수 -> 풀링 이 과정을 여러번 통과시킴

컴퓨터가 좋아