GAN 보다 더 높은 quality 의 image 를 생성하는 Diffusion model 의 구조와 Classifier guidance 를 소개한 논문 (Dhariwal & Nichol, 2021)[1] 을 리뷰해 보았다.
수식 번호의 경우 논문의 표기를 따른다.
Abstract
논문에서는 Diffusion model 이 생성 모델에 대한 SOTA 보다 더 좋은 품질의 이미지를 생성함을 보인다. 생성을 위한 더 나은 구조를 찾아 unconditional image generation 을 수행한다. 또한 classifier guidance 를 통해 conditional image generation 역시 수행한다. Classifier 의 gradient 를 이용하는 compute-efficient 방법으로, diversity 와의 trade-off 가 존재한다. 하나의 sample 을 생성하기 위해, BigGAN-deep 에 비해 25번의 iteration 이 더 적게 필요함을 확인하였으며 ImageNet 이미지에 대해 FID score 2.97 을 달성한다. 또한 upsampling diffusion model 과 classifier guidance 를 결합시켜 ImageNet 데이터에 대해 FID score 3.94 를 달성한다.
1. Introduction
Image generation task 에 있어서 GAN 은 지난 몇 년간 SOTA 를 유지해 왔다. 그러나 GAN 을 통해 생성된 sample 들은 diversity 가 높지 않으며, 모델 자체를 학습시키는 과정이 어렵다는 단점 역시 가지고 있다. 따라서 likelihood 를 기반으로 하는 생성 모델들이 제안되었고, 높은 diversity 와 학습이 쉽다는 장점을 가졌지만 이들에 의해 생성된 sample 은 GAN 에 의해 생성된 sample 보다 quality 가 낮았다. 최근에 likelihood 를 이용하는 생성 모델로 diffusion 이 새로 제시되었다. Diffusion 의 training object 는 re-weighted variational lower bound 로, CIFAR-10 데이터셋 생성에 대해서 SOTA 를 달성하였다. 그러나 다른 데이터셋 (LSUN, ImageNet) 에 대해서는 여전히 GAN 보다 좋은 성능을 나타내지 못하였다. Nichol & Dhariwal 에 의해 upsampling stack 이 도입되며 diffusion model 개선이 이루어졌지만, ImageNet 에 대한 SOTA 모델 (BigGAN-deep) 보다 좋지 않은 FID score 를 나타냈다.
이 논문에서는, diffusion model 과 GAN 의 성능이 차이나는 이유를 크게 2가지라고 주장한다.
1) 최신 논문에서 제안된 GAN 은 그 구조가 매우 다양하게 탐색되었으며 많이 개선되어 있다. 반면 Diffusion 은 충분한 모델 구조 개선이 이루어지지 않았다.
2) GAN 은 sample 의 다양성 (diversity) 와 quality 사이의 trade-off 가 이루어진다. 즉 sample 에 대한 전체 distribution 은 cover 하지 않지만, 그 quality 가 좋다.
따라서 논문에서는 diffusion model 의 구조를 개선시키고, diversity 에 대한 trade-off 를 도입해 sample 의 품질을 향상시킨다. 이를 통해 서로 다른 dataset 에 대해, GAN 보다 더 좋은 성능을 기록하고 SOTA 를 갱신한다.
2. Background
💡 2. 절에서는 Diffusion model 의 개요 (DDPM)와 이를 개선시킨 연구들을 소개하고, 실험 환경에 대해 설명한다.
Ho et al. (2020) 에서 처음으로 제안된 DDPM 은 noise 로부터 시작해 ‘denoising’ 과정을 거쳐 sample 를 생성한다. 에 가해진 noise 를 예측하는 모델 를
가 최소가 되게끔 학습시킨다. 학습된 network 를 이용해, 분포 를 모델링한다. 분포의 분산 는 고정된 상수로 두고, 평균 는 network 에 대한 식으로 나타낸다. 이로부터, reparameterization trick 을 통해 로부터 sampling 을 통해 을 얻는다.
또한 DDPM 을 VAE 로써 해석해, 더 좋은 성능을 가져다주는 training object 을 유도한다.
DDPM 의 training 과정과 sampling 과정은 Song & Ermon (2021) 에서 제안된 것 처럼 각각
- Training : Denoising score matching
- Sampling : Annealed Langevin dynamics
를 따른다.
2.1. Improvements[2]
Nichol & Dhariwal (2021) 는 DDPM 에서 고정되어 있었던 분산 을 매개화 한다. 출력값이 인 인공 신경망에 대해 (mixing vector 를 예측하는 인공 신경망),
로 매개화 한다. 이 때 은 에 의존하지 않으므로, 두 개의 network (, )를 모두 학습시키기 위한 새로운 training object
를 정의한다. 는
이며, 내에서 에 관련된 gradient 는 업데이트를 진행하지 않게끔 해 오직 만을 update 하도록 한다. 결과적으로 , 는 각각 , 을 통해서 업데이트 되는 것이다. 실제 학습 시에는 에 importance sampling (IS) 을 적용하였다.
이를 통해 sample 의 품질을 크게 하락 시키지 않으며 더 빠른 sampling 이 가능하다. 이 논문에서도, 위 training object 를 이용해 학습을 진행한다.
Song et al. (2020) 에서는 DDIM 이 제안되었다. DDIM 은 DDPM 의 forward process 를 non-Markovian noising process 로 대체한 모델로, DDPM 에 비해 (1번의 sampling 당) 50회 적은 sampling step 을 사용할 수 있다. DDIM 의 forward process 에서 marginal distribution 는 DDPM 과 동일하지만, sampling process 에서 reverse noise distribution 의 분산을 조정함으로써 DDPM 과는 다른 sampling 과정을 유도한다 (deterministic sampling). 분산을 0으로 고정한 것이 DDIM 으로, latent variable 과 image 사이의 deterministic mapping 을 유도하며 더 적은 step 만에 sampling 이 가능하도록 한다.
2.2. Sample Quality Metrics
서로 다른 모델이 생성한 sample 의 quality 를 비교하기 위해 아래와 같은 metric 들을 사용하였다.
Inception Score (IS)
모델이 ImageNet 의 각 class 에 대해 생성한 sample 의 집합이, 전체 class distribution 을 얼마나 잘 나타나는지 정량적으로 측정한다. 단점으로는, 전체 dataset 에 대한 작은 부분집합을 memorize 한 model 이 높은 IS 값을 가지게 된다는 점이다.
Fréchet Inception Distance (FID score)
IS 보다, 인간의 평가와 더 유사한 결과를 나타내는 척도로 알려져 있다. FID는 Inception-V3 latent 공간에서 서로 다른 두 이미지 분포 간의 대칭적인 measure 를 나타낸다. 최근에는 standard pooled feature 보다 spatial feature 를 사용하는 sFID score 가 제안되었다. sFID 는 FID 에 비해 공간 정보 간의 관계를 더욱 잘 capture 하며, 이미지의 분포가 일관적으로 high-level structure 를 따르게끔 한다.
Precision and Recall
Precision 은 모델이 산출한 sample 들 중 data manifold 에 존재하는 비율을 측정하며, Recall 은 sample 들에 의해 형성되는 manifold 에 속하는 data point 의 비율을 측정한다.
cf) 머신러닝에서 사용되는 precision 과 recall 의 정의는 다음과 같다.
논문에서는 diversity 와 sample 의 품질을 동시에 정량적으로 측정 및 비교하기 위해, FID score 를 기본 metric 으로 사용한다. 추가적으로 Quality 측정을 위해 precision 과 IS 를, diversity 를 측정하기 위해 recall 을 사용한다.
3. Architecture Improvements
💡 3. 절에서는 FID score 를 향상시키기 위한 모델 구조에 대해 설명한다.
Diffusion model 에 대해 가장 좋은 quality 의 sample 을 추출하는 모델 구조를 탐색하였다.
DDPM 이 처음 제안된 Ho et al. (2020) 에서는, Jolicoeur-Martineau et al. (2020) 에서 denoising score matching 을 사용할 때 sample 의 품질을 높이기 위해 제안한 U-Net 구조를 사용한다. U-Net 구조를 요약하면 다음과 같다.
- Residual layer 와 downsampling layer 를 연속적으로 사용
- Residual layer 와 upsampling convolution 역시 연속적으로 적용
- 위 layer 들 간 Skip-connection 을 적용
- 각 residual block 에 대해, global attention 을 적용 (# of attention head = 1, resolution ) 하고 timestep embedding 의 projection 을 추가
위 구조에 다음과 같은 변형을 추가하여 size 의 ImageNet 에 대해 sample 의 diversity 와 quality 를 높였다.
- Model size 는 일정하게 유지하면서, width 대비 depth 를 증가시키기
- Number of attention head 증가
- Attention 의 resolution 으로 , , 사용
- Residual connection 의 scale 을 모두 배
- Upsampling / downsampling 과정에서 BigGAN 의 residual block 을 사용
모델은 ImageNet 데이터셋에 대해 학습시켰으며, batch size = 256, sampling step = 250 으로 두었다. 여러가지 모델 구조에 대해 학습을 진행하며 FID score 를 측정하였다. 그 결과는 Table 1. 에 나타나 있다.
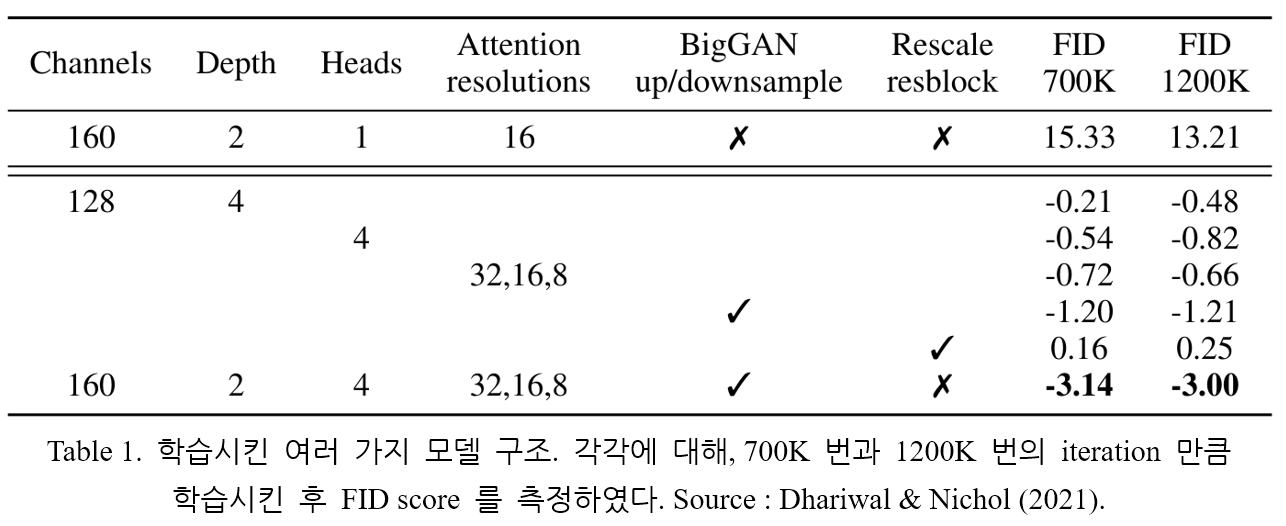
Residual connection 에 대한 rescaling 외의 모든 기법은 성능을 향상시켰고, 복합적으로 좋은 효과를 가져왔다. Figure 2. (Left) 에 나타나 있듯, 모델의 depth 증가할수록 성능 역시 높아졌다. 그러나 학습에 소요되는 시간 역시 증가하고, width 가 더 큰 모델과 동일한 성능을 달성하기까지의 시간 역시 더 많이 소요되었다. 결과적으로 이후 실험에서는, depth 를 변화시키며 성능을 측정하지는 않았다.
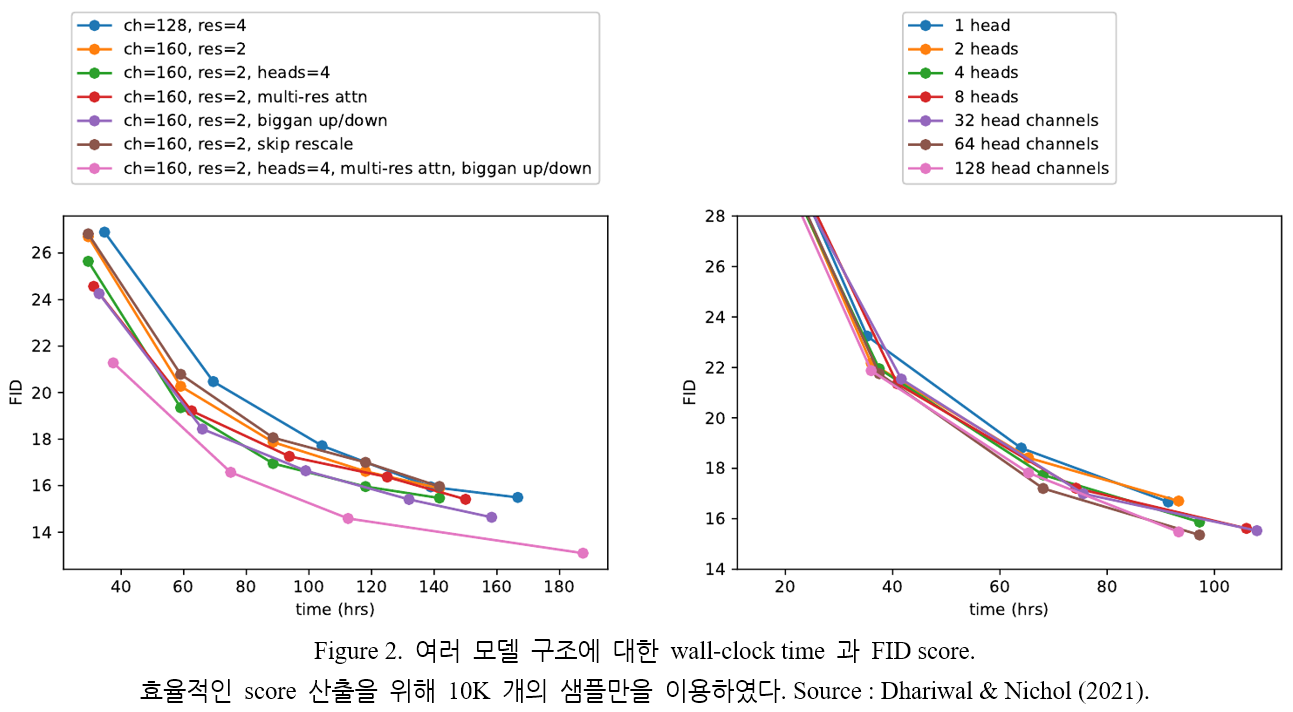
논문에서는 Transformer 구조에서 제안된 attention 과 더 잘 일치하는 attention 구조에 대한 탐색 역시 진행하였다. Attention head 의 수 또는 하나의 head 에 존재하는 channel 의 수를 변화시키며 FID score 를 측정하였다. 변화시킨 조건 외에는 base channel 수는 128개, residual block 은 2개 (1개의 resolution 당)를 사용하였으며 multi-resolution attention, BigGAN up/downsampling 을 적용하였다. Table 2. 에 실험 결과가 나타나 있다. Head 의 수를 늘리거나 채널의 수를 줄이는 것이 높은 성능을 유도하는 것을 알 수 있다.
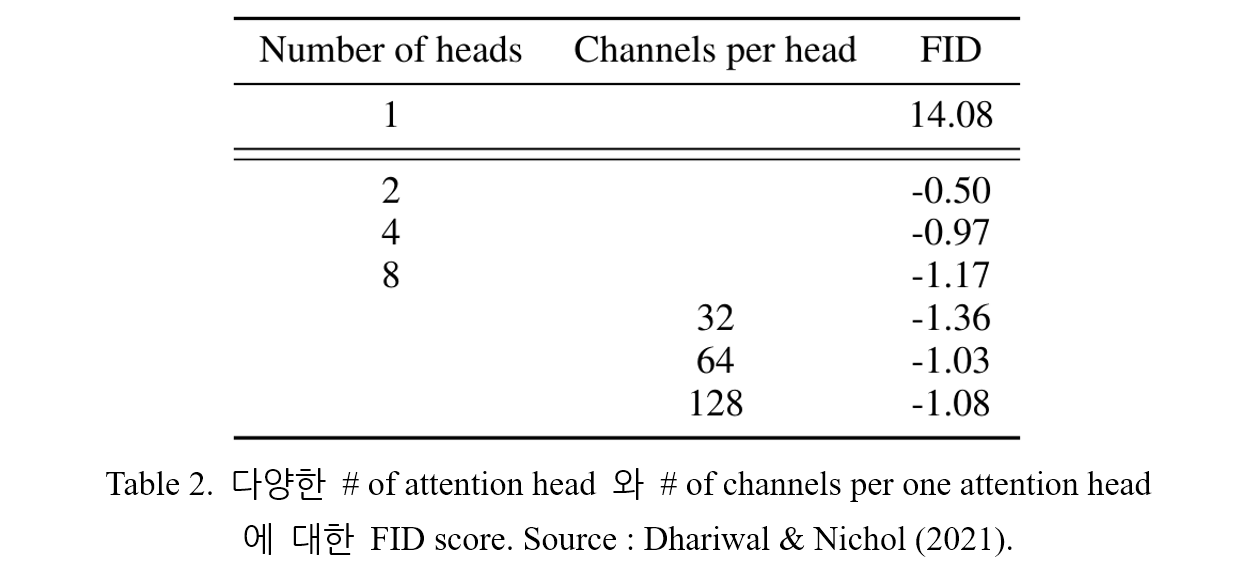
Figure 2. (Right) 에서 알 수 있듯, 64 channel 을 사용하는 경우 시간적인 측면에서 가장 좋은 결과를 나타냈으므로, 이후 실험에서는 64개 채널을 기본으로 사용하였다. 이러한 선택은 최근에 제안된 transformer 구조와 잘 일치하며, 비슷한 FID score 값을 가진다.
3.1. Adaptive Group Normalization (AdaGN)
AdaGN 은 group normalization 이 적용된 후, 각각의 residual block 에 대해 timestep 및 class embedding 을 추가한다. 과정을 수식으로 나타내면 아래와 같다. Timestep 및 class embedding 에 대한 linear projection 을 각각 라 하고, residual block 내에서 convolution 이 한 번 적용되었을 때의 값을 라고 하면,
Table 3. 에 AdaGN 의 사용 유무에 따른 성능을 나타내었다. AdaGN 이 적용되었을 때 모델의 성능이 더 좋음을 확인할 수 있다.
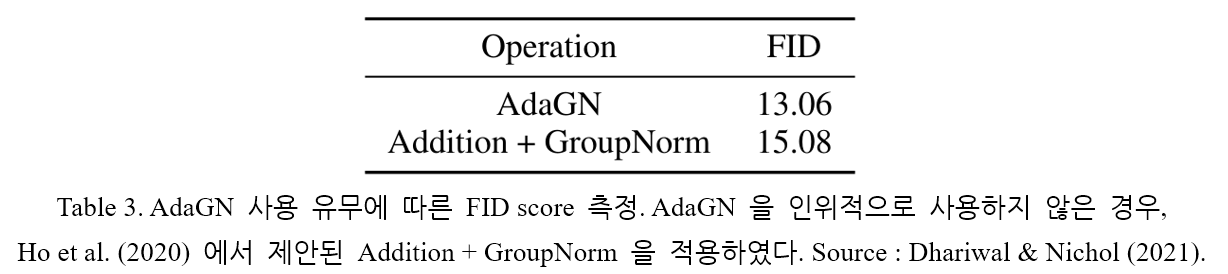
따라서 앞으로의 실험에서는 기본적으로 AdaGN 을 적용시켰다.
모델에서 최종적으로 사용한 구조는 다음과 같다.
- 2 residual blocks per resolution
- Multiple heads with 64 channels/head
- 32, 16, 8 attention resolution
- BigGAN up/downsampling
- AdaGN
4. Classifier Guidance
GAN 의 경우 특정 class 에 속하는 이미지를 생성하기 위해 class label 을 사용한다. 대부분의 경우 discriminator 가 특정 class 에 이미지가 속하는지 분류하는 classifier 처럼 설계되어 class-conditional normalization 기법을 사용한다. GAN 의 특징으로부터, class label 에 conditional 한 diffusion 역시 설계할 수 있다. 3.1. 절에 제시된 것 처럼, 이미 정규화 층에는 class 에 대한 정보를 포함시켰다 (). 논문에서는, 이와는 또 다른 방법을 도입한다. Diffusion generator 자체를 원하는 방향으로 변화시킬 수 있게 해 주는 classifier 를 고려해 보자. Class label 에 속하는 이미지를 생성하도록 하기 위해, noise 가 가해진 이미지 에 대한 classifier 를 학습시키고 gradient 를 이용해 sampling process 가 특정 class 의 이미지를 생성하도록 조정할 수 있다.
4 절에서는 classifier 를 도입하는 이론적인 방식 2가지에 대해 논의한다. 이후, 실제 sampling 과정에서 (in-practice) 적용될 수 있게끔 변형시키는 방법을 소개한다. Notation 의 경우 편의를 위해
로 표기한다.
4.1. Conditional Reverse Noising Process
Unconditional diffusion model 은 sampling 과정에서 을 사용한다. 이를 class label 에 conditional 하게 바꾼다면, sampling 의 각 step 이 아래 확률분포로부터 sample 을 추출하게끔 하면 충분하다. Normalizing 상수를 라고 하면,
식 (2)로부터 sampling algorithm 을 유도해 보자. 기존 diffusion model 의 를 간소화 시켜 나타내면
이고 이 분포로부터 reparameterization trick 을 사용해 sampling 을 진행했었다. 여기서, Class-conditional 특성을 도입하려면 의 값을 계산해야 한다. 계산의 편의성을 위해 를 계산하고 log 를 다시 지우는 방식을 생각해 보자. 우선,
를 계산할 수 있다.
의 curvature 가 에 비해 작다고 가정하자. 이 가정은 diffusion step 의 수가 무한히 발산하지 않을 때 성립한다. 가정이 성립한다면, 근방에서의 테일러 전개에 의해
식 (5)에서 는 상수이고, 로 치환하면
이 성립한다. 식 (4), (6) 을 이용해 를 계산해 보면
식 (9)에 reparameterization trick 을 적용하면 에 대해
이 성립한다. 이제 식 (10)에서 log 를 지우는 과정을 생각하면,
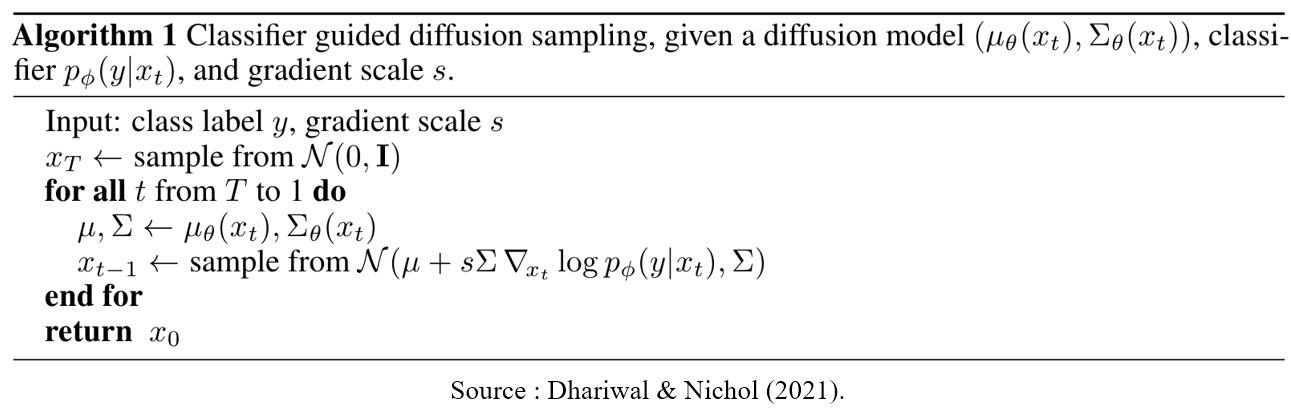
이다. 결과적으로 분포 로 부터 를 추출하는 것이 sampling 과정에 해당하게 된다. 상수 의 경우, 식 (2)에서 normalizing constant 로 고려되었다.
즉, 식 (10)으로부터 conditional transition operator 는 평균값이 변한 unconditional transition operator 로 근사 될 수 있음을 알 수 있다. 이를 적용한 sampling algorithm 은 아래와 같다.
4.2. Conditional Sampling for DDIM
4.1. 절의 방법은 stochastic sampling 과정에서만 적용될 수 있다. DDIM 과 같은 deterministic sampling 에는 적용될 수 없으며, 따라서 score-based trick 을 새롭게 소개한다. 데이터에 추가되는 noise 를 예측하는 network 를 라고 해 보자. Notaion 은 Ho et al. (2020) 을 따른다. Perturbed data distribution 에 대한 score function 을 계산하면
과 같다. 이에 대한 유도 과정은 다음과 같다.[2]
DDPM 에서
이다. 이 때 아래 두 식이 성립하므로
Distribution 의 pdf 식에 이를 대입해 계산하면
이다.
Class-conditional 조건을 위해 다음 분포 를 고려해 보자. 앞서 정의한 classifier 를 이용해 이에 대한 score function 을 구하면
이제 joint distribution 의 score 를 이용해 network 를 update 시키는 과정을 생각하자. 식 (13)을 통해 update 하고자 하는 network 를 라고 하자. 식 (11) 과 유사하게
가 성립하고 따라서
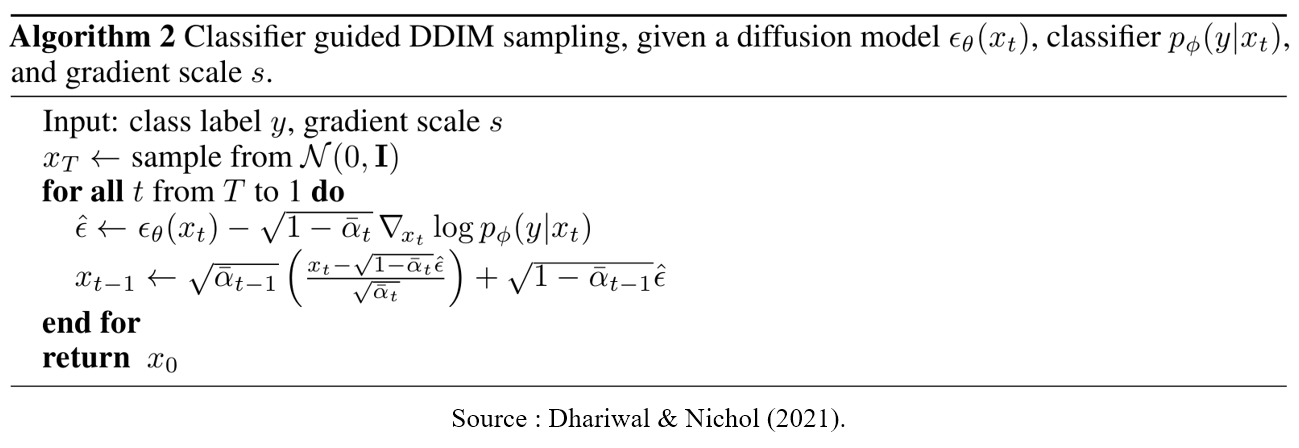
로 정의할 수 있다. DDIM 과 동일한 sampling 과정을 사용할 수 있지만 로부터 을 sampling 하는 식 내의 network 가 network 로 바뀌게 된다. 이에 대한 알고리즘은 아래와 같다.
4.3. Scaling Classifier Gradients
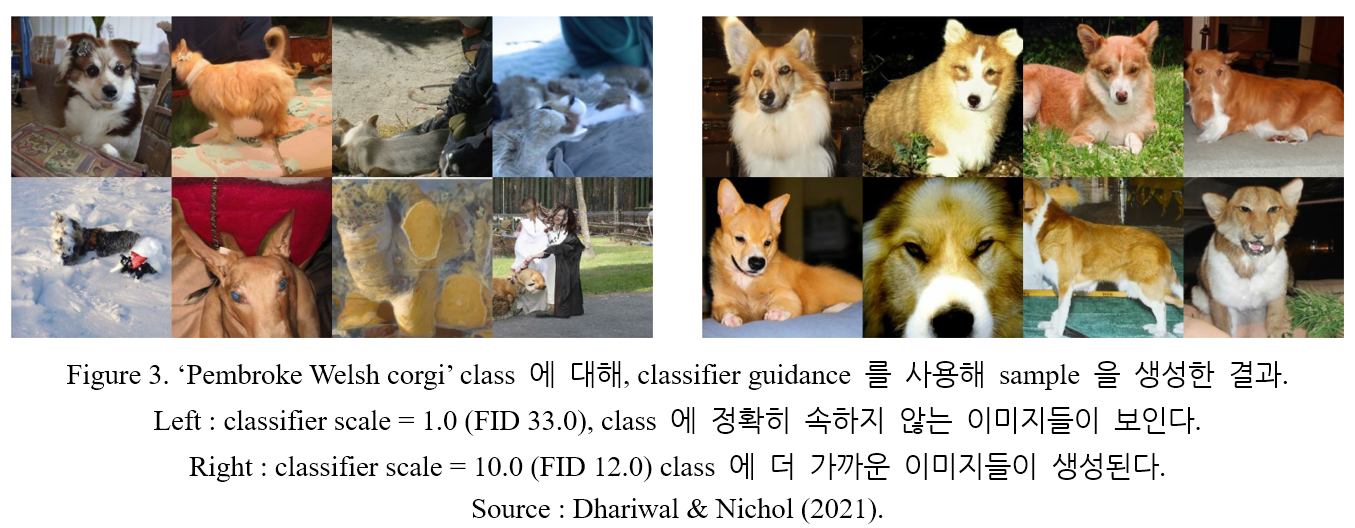
Generation task 에 classifier 를 적용하기 위해서는 우선 ImageNet 데이터에 대해 classifier 를 학습시킨다. 모델 구조의 경우 U-Net 을 기본적으로 사용하며 size 의 layer 를 downsampling 시켜 분류 문제를 해결하게끔 변형하였다. Diffusion model 에서 사용한 noise 와 동일한 분포에 대해 classifier 를 학습시켰고 과적합 방지를 위해 randomcrop augmentation 역시 적용하였다. 학습이 종료된 후에는 식 (10)을 이용해 diffusion 모델과 classifier 를 결합시켰다.
그러나 실제 실험에서는, classifier 에 의한 gradient 를 1보다 비율로 scaling 시켜 주어야 함을 발견하였다. Scale = 1 을 사용한 경우 class 에 할당된 확률이 50% 근처로 계산되었고 생성된 sample 들은 해당 class 에 속하지 않은 경우가 많았다. 반면 1보다 큰 scale factor 를 사용한 경우 특정 class 에 속할 확률이 100% 부근의 값으로 계산되었고 올바른 sample 들이 생성되었다.
Scaling 의 효과는 다음 수식으로부터 설명될 수 있다 : 임의의 상수 에 대해,
가 성립한다. Classifier distribution 이 에 비례하게끔 re-normalize 된 classifier 로부터 conditioning 이 일어나게 된다. 일 경우 분포 가 더 sharp 해 지게 되고, 이는 해당되는 class 에 대한 gradient scale 을 증가시킨다. 결과적으로 확률분포가 특정 class 에 대해 높아지고 나머지 class 에 대해서는 낮아지기 때문에 sample 의 diversity 는 낮아지지만 fidelity (quality; 품질) 가 높아지게 된다.
지금까지는, 사용하는 diffusion model 은 unconditional model 이라고 가정하였다. 그러나, diffusion model 자체를 conditional model 로 사용할 수도 있다. Classifier guidance 는 동일한 방식으로 적용된다. 모델의 종류와 classifier guidance 유무에 따른 sampling 결과를 Table 4. 에 나타내었다. Conditional model 과 guidance 를 같이 사용함으로써 가장 좋은 FID score 를 얻을 수 있다.
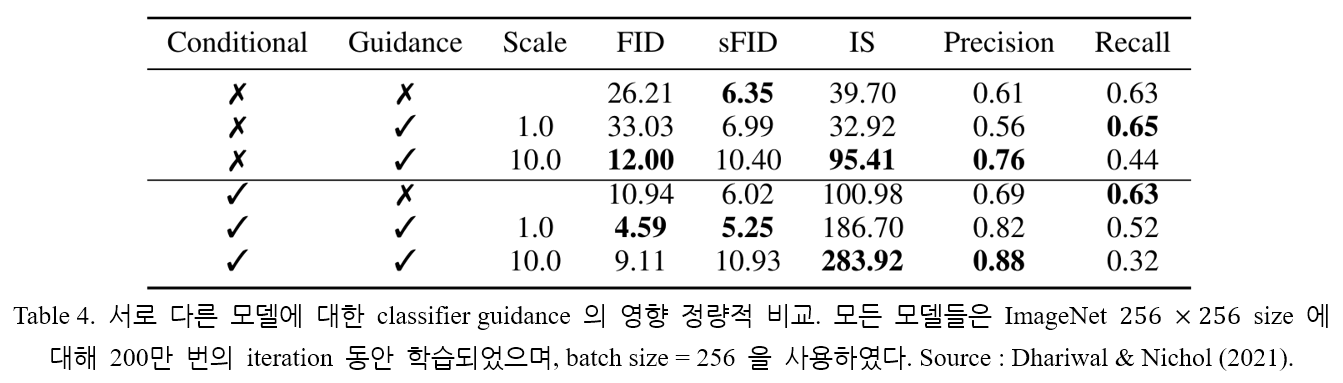
2.2. 절에서 소개한 여러 가지 metric 을 살펴보자. Recall 은 diversity 를, Precision 과 IS 는 quality 를, FID 와 sFID 는 둘을 종합적으로 고려한 지표이다. Table 4. 로부터 sample quality 와 diversity 사이의 trade-off 를 관찰할 수 있다. Gradient scale 을 조정하며 더 구체적으로 trade-off 를 살펴본 결과를 Figure 4. 에 나타내었다.
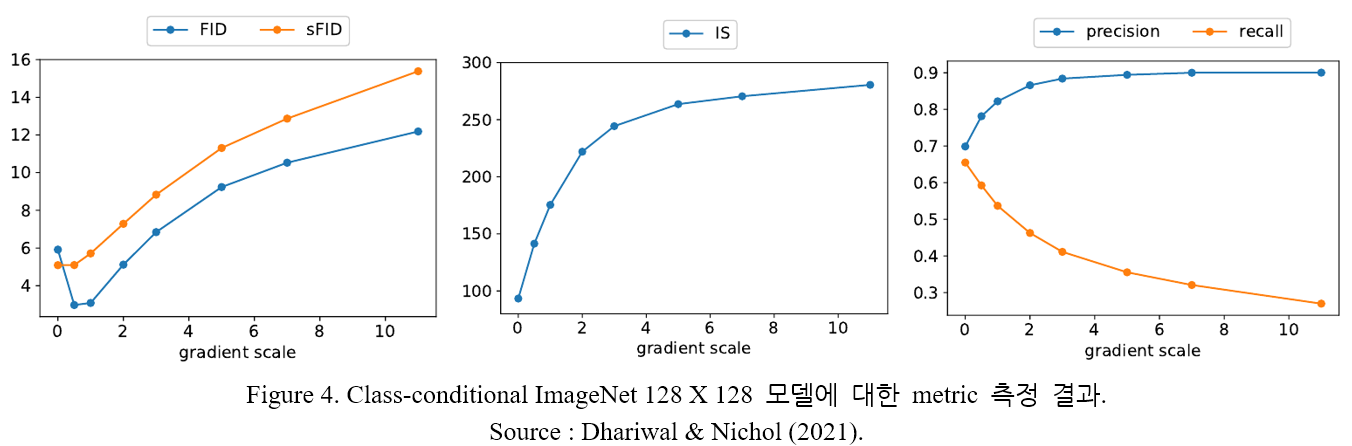
Figure 4. 에서 precision, recall 값을 통해 trade-off 현상을 확인할 수 있다. Gradient scale 이 커질수록 quality (IS, precision) 은 증가하는 반면 diversity (recall) 은 감소한다. FID, sFID score 는 이 둘을 종합적으로 고려하므로 중간 지점 ( 부근) 에서 가장 좋은 결과를 가짐을 알 수 있다.
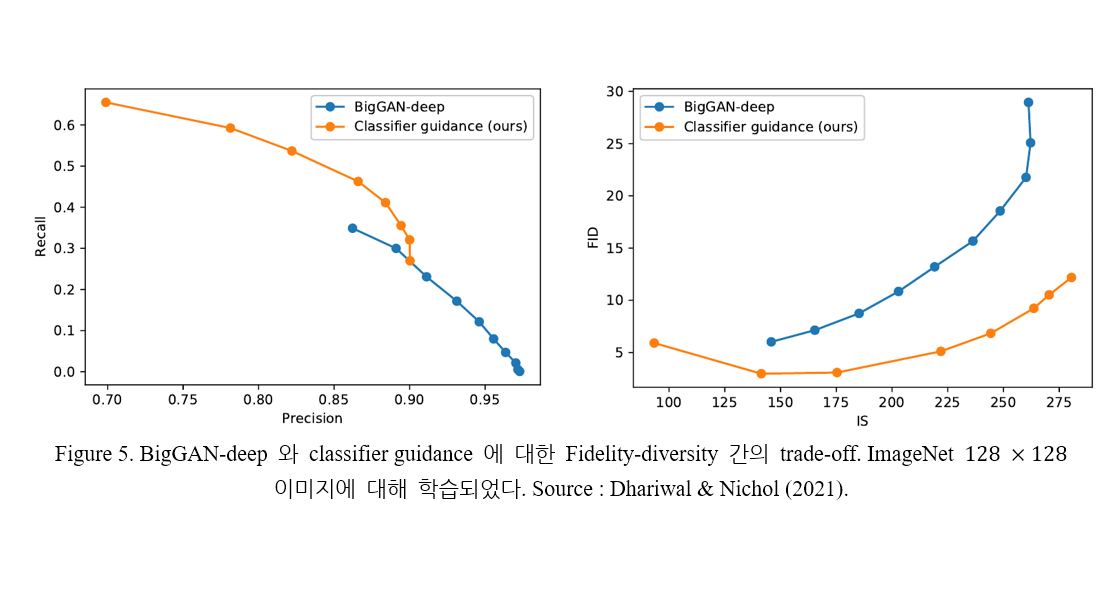
Figure 5. 는 classifier guidance 와 BigGAN-deep 의 performance 를 정량적으로 비교한다.
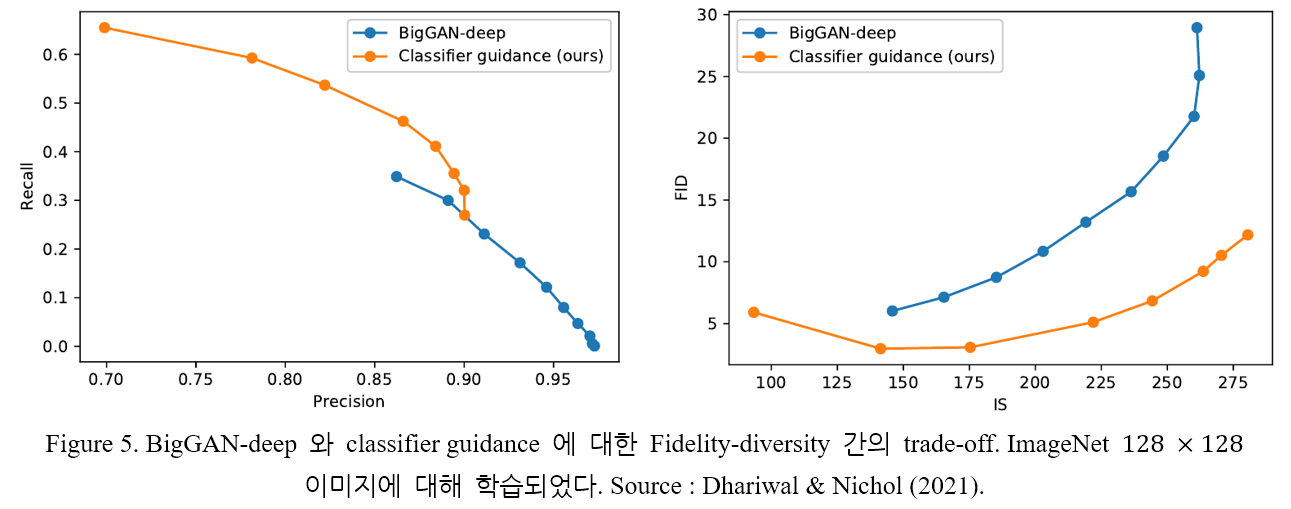
BigGAN-deep 보다 classifier guidance 의 FID score 가 더 좋음을 알 수 있다.
5. Results
첫 번째로 개선시킨 모델 구조를 test 하기 위해 LSUN 데이터셋 중 bedroom, horse, cat class 에 대해 모델을 학습시켰다. 두 번째로 classifier guidance 의 효과를 검증하기 위해 ImageNet dataset () 에 대해 학습을 진행하였다.
5.1. SOTA Image Synthesis
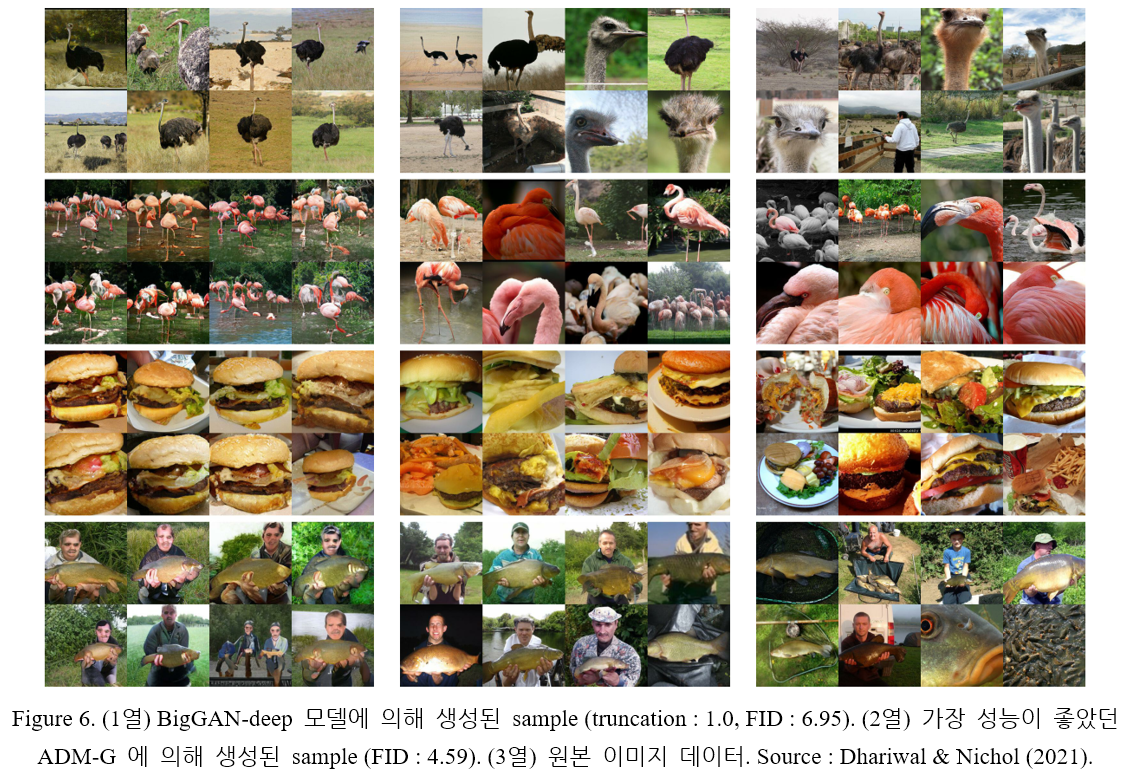
모델 (ADM : Ablated Diffusion Model 이라고 표기한다)의 결과는 Table 5. 에 나타나 있다. 모든 task 에 대해 가장 좋은 FID score 를 달성하며, 1개의 task 를 제외하고 가장 좋은 sFID score 역시 달성한다. 개선된 모델 구조만을 이용해서도 LSUN 데이터셋과 ImageNet 에 대해 SOTA 를 갱신하며, 더 높은 해상도의 ImageNet 데이터에 대해서는 classifier guidance 를 통해 GAN 보다 높은 품질의 이미지를 생성한다. GAN 보다 높은 품질의 이미지를 생성함과 동시에, recall 에 의해 측정되는 diversity 역시 높은 값을 유지한다. 또한 이 과정은 25번의 diffusion step 만을 필요로 한다.
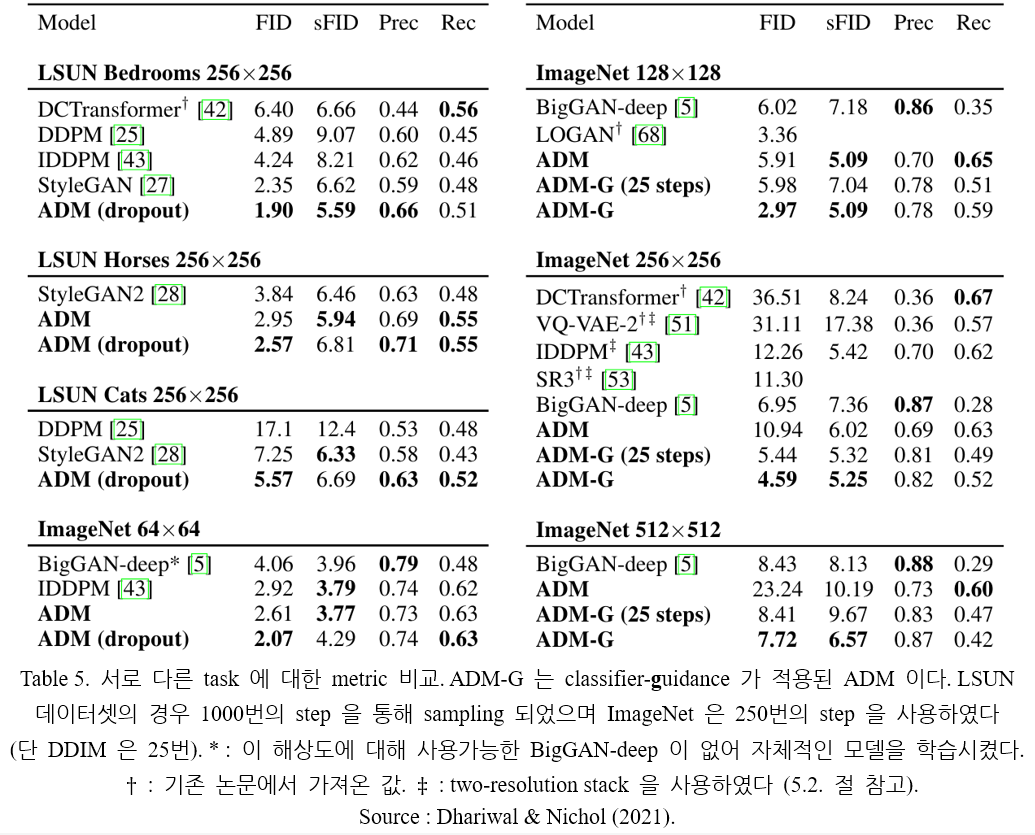
Figure 6. 은 BigGAN-deep 모델과 가장 좋은 성능을 기록한 ADM 에 의해 생성된 이미지를 나타낸다. 이미지의 quality 는 비슷하지만 diffusion 이 더 다양한 이미지를 산출한다.
5.2. Comparison to Upsampling
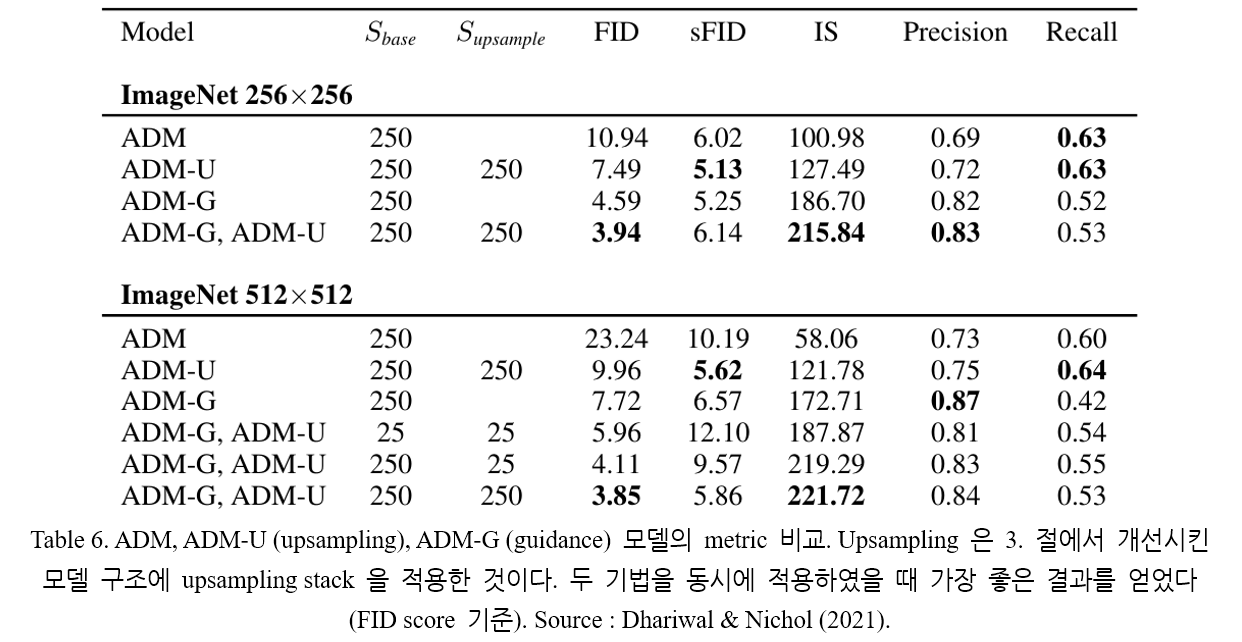
논문에서는 classifier guidance 의 결과를 two-stage upsampling stack 에 의한 결과와도 비교한다. Nichol and Dhariwal (2021) 과 Saharia et al. (2021) 에서, low-resolution diffusion model 과 upsampling diffusion model 을 결합하여 이미지를 생성하는 방법이 제시되었다 (two-stage). Low-resolution model 은 sample (image)를 생성하고, upsampling model 은 해당 sample 에 대해 upsampling 을 수행한다. 이 기법을 통해 ImageNet image 에 대한 FID score 를 개선시켰지만, BigGAN-deep 만큼의 quality 를 얻지는 못하였다.
Table 6. 에는 guidance 와 upsampling 이 서로 다른 metric 에 대해 좋은 값을 나타낸다는 점이 나타난다. Upsampling 의 경우 높은 recall 값을 유지하며 precision 을 개선시키고, guidance 는 앞서 설명한 trade-off 를 유도한다. 두 기법을 동시에 사용해 가장 좋은 FID score (3.85) 를 얻었는데, low-resolution model 에 guidance 를 적용시키고 upsampling model 을 통과시킨 경우이다.
Reference
[1] Prafulla Dhariwal, Alex Nichol, Diffusion Models Beat GANs on Image Synthesis, CVPR, arXiv:2105.05233, 2021.
[2] Lilian Weng, “What are Diffusion Models?", 2021.07.11.
