[MMD] Probability & Statistics for Machine Learning & Data Science Week 3
Week 3 - Sampling and Point estimation
Lesson 1 - Population and Sample
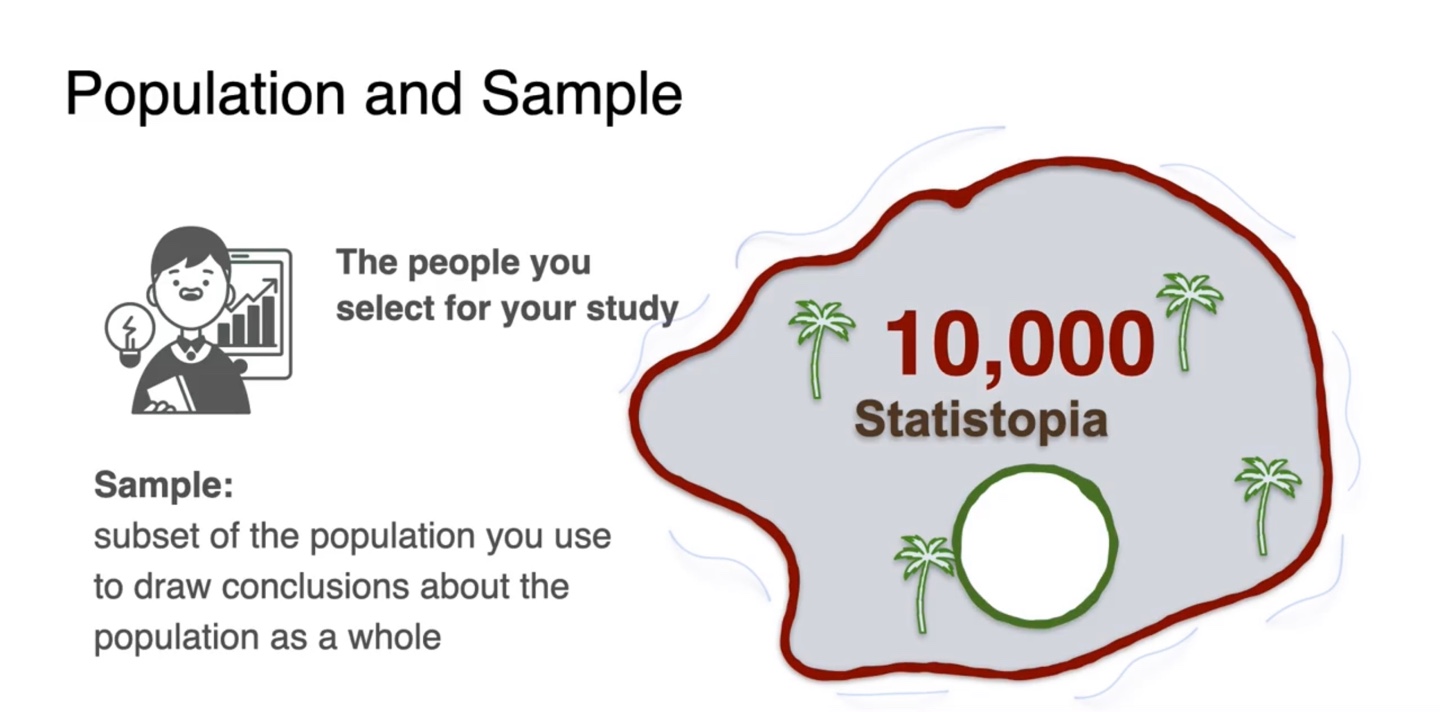
Population and Sample
-
Statistopia라는 섬에 사는 사람들의 평균 신장(average height)를 알고 싶다.
-
해당 섬 속에 사는 모든 사람의 신장을 조사하여 전체 사람 수로 나눠주면 평균을 아주 쉽게 구할수 있다.
- Easy Peasy Lemon Squeezy !
-
- 그러나 만약, 전체 10,000명의 사람들이 섬에 모여 산다면 이들의 모든 신장을 조사하여야 하가 때문에 더이상 쉬운 문제가 아니게 된다.
-
Population이란 어떠한 통계를 내고자 할 때 알아야 하는, 그룹 내 개개인의 entire한 개수를 말한다.
- 현재 모든 사람의 신장을 구하고자 하므로 Statistopia에 사는 10,000명의 사람들이 population이다.
-
Sample은 선택한 사람들의 숫자로(일부) 통계적 수치를 내고자 할 때 정의된다.
- 전체 population의 subset으로 결과를 알아내고자 할 때 사용된다.
-
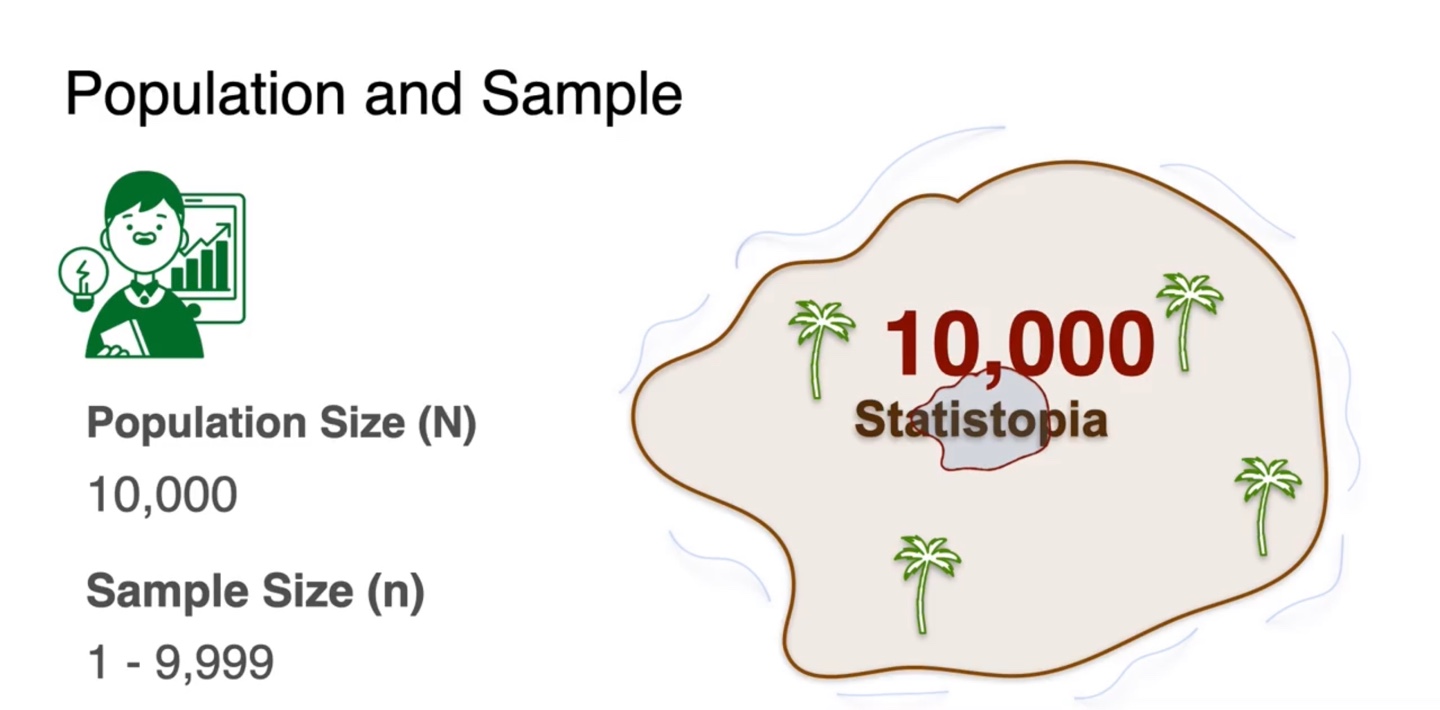
만일 population의 숫자가 10,000이라면 이는 기호로 이라 정의한다.
- Sample size의 기호는 으로 표기하며 1부터 9,999까지의 값을 갖게될 것이다.
-
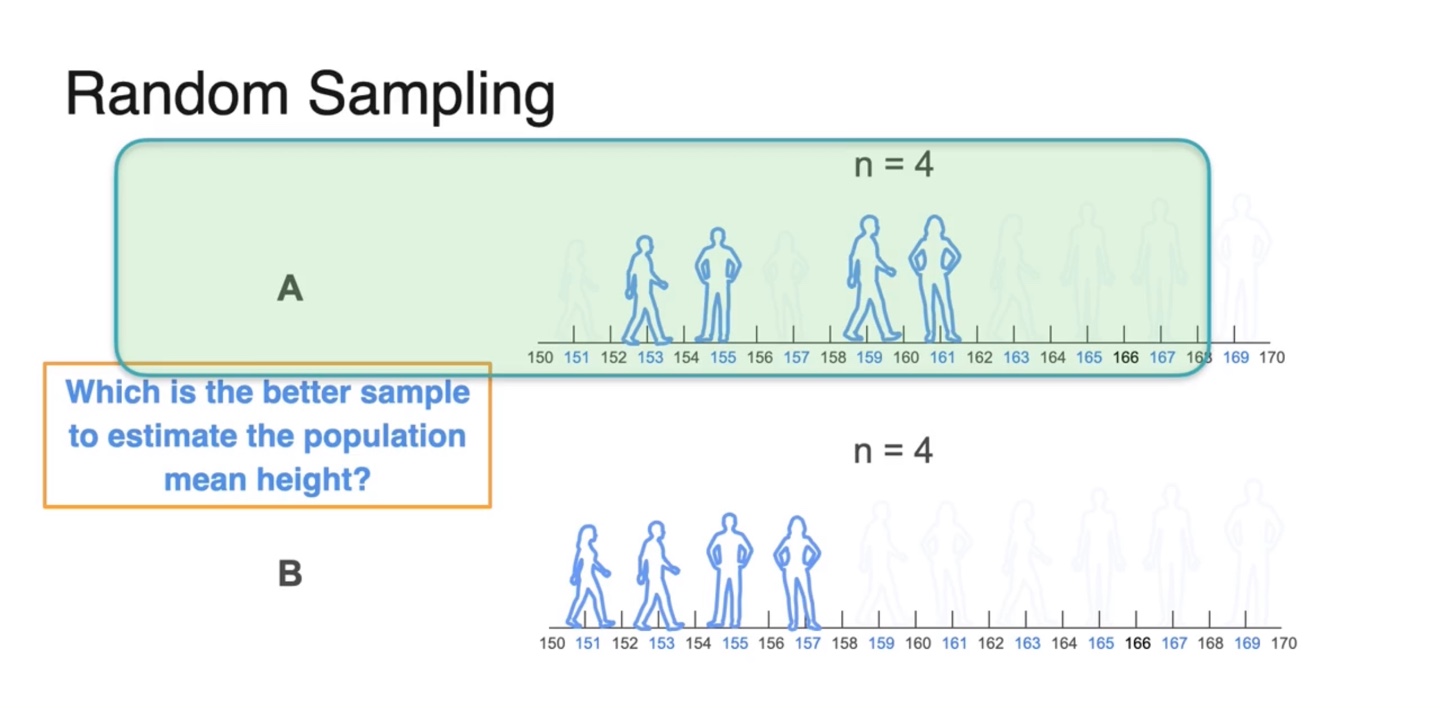
Random Sampling이란 전체 population의 일부 sample을 random으로 선정하는 것을 말한다.
-
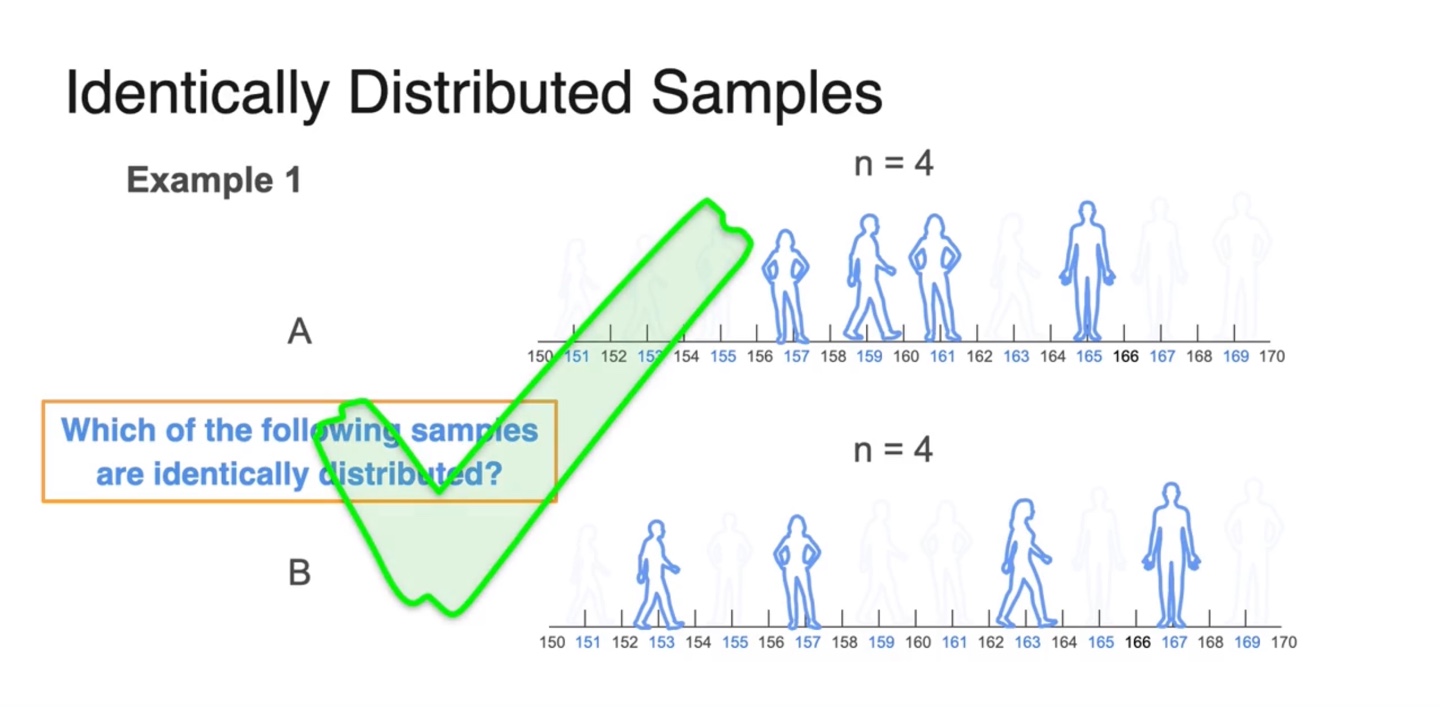
만약 라면, 집단이나 집단으로 random하게 4명을 선택한 subset이 하나의 sample이 된다.
-
이 중 어떤 집단이 population의 mean height를 더 잘 표현하고 있을까?
- sample은 키가 작은 사람들이 대부분의 sample을 대표하고 있기 때문에 평균값이 낮게 나올 수 있으므로, 집단의 sample이 population에 가깝다.
-
-
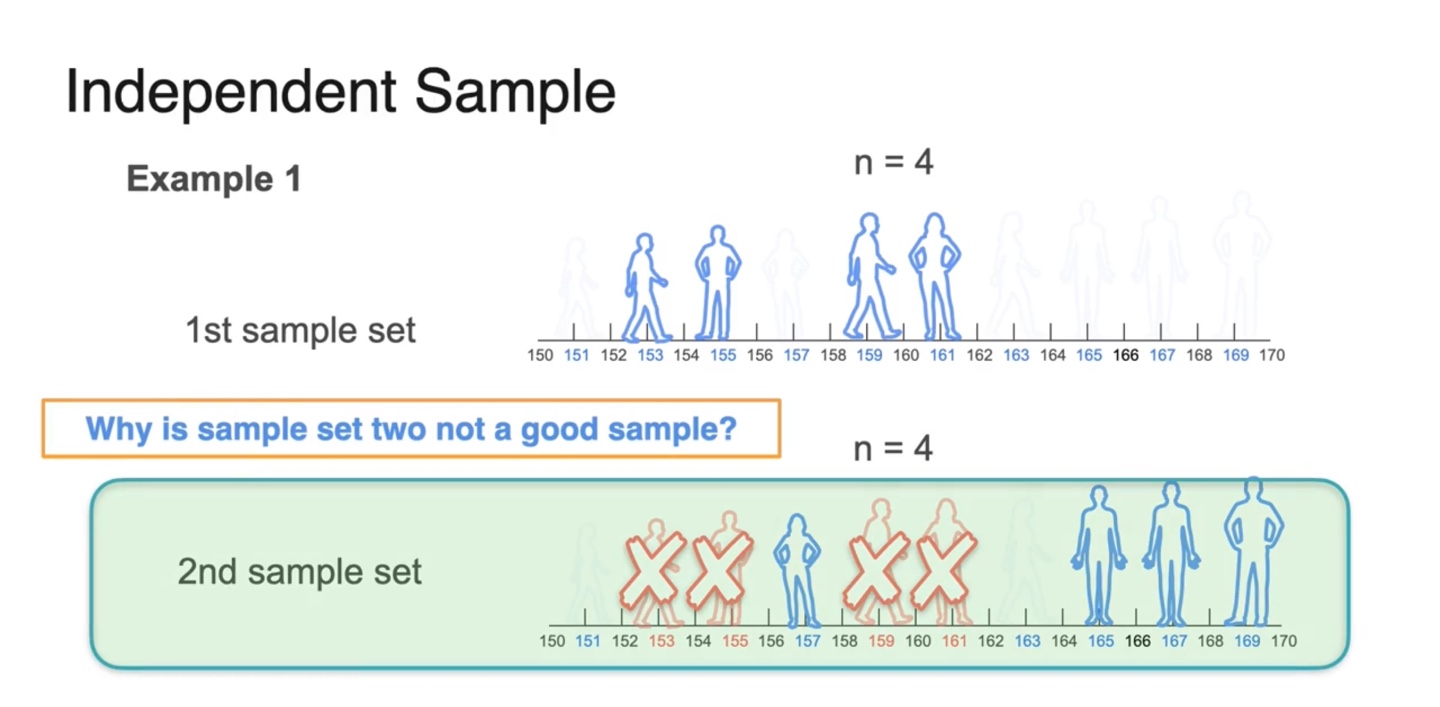
만약 첫 번째 sample을 뽑고 두 번째 sample을 뽑을 때, 첫 번째 sample의 원소들을 뽑지 못한다면 어떨까?
-
이렇게 되면 두 번째 sample이 첫 번째 sample의 추정에 큰 영향을 받게 될 것이므로 좋지 않은 sampling이라고 한다.
- 즉, independent하지 않고 두 사건이 dependent해 진다.
-
-
따라서 중복을 허용하며 sampling하는 것이 중요하다.
- 이전 sample set에 의존하지 않도록 random sampling해야 하는 것이다.

-
Sampling시 가장 중요한 점은 independent identically distributed(i.i.d)한 규칙을 적용해야 한다는 점이다.
- 두 sample의 sampling 규칙이 동일하고 표본 분포가 다양할 때 더욱 의미를 가진다.
-
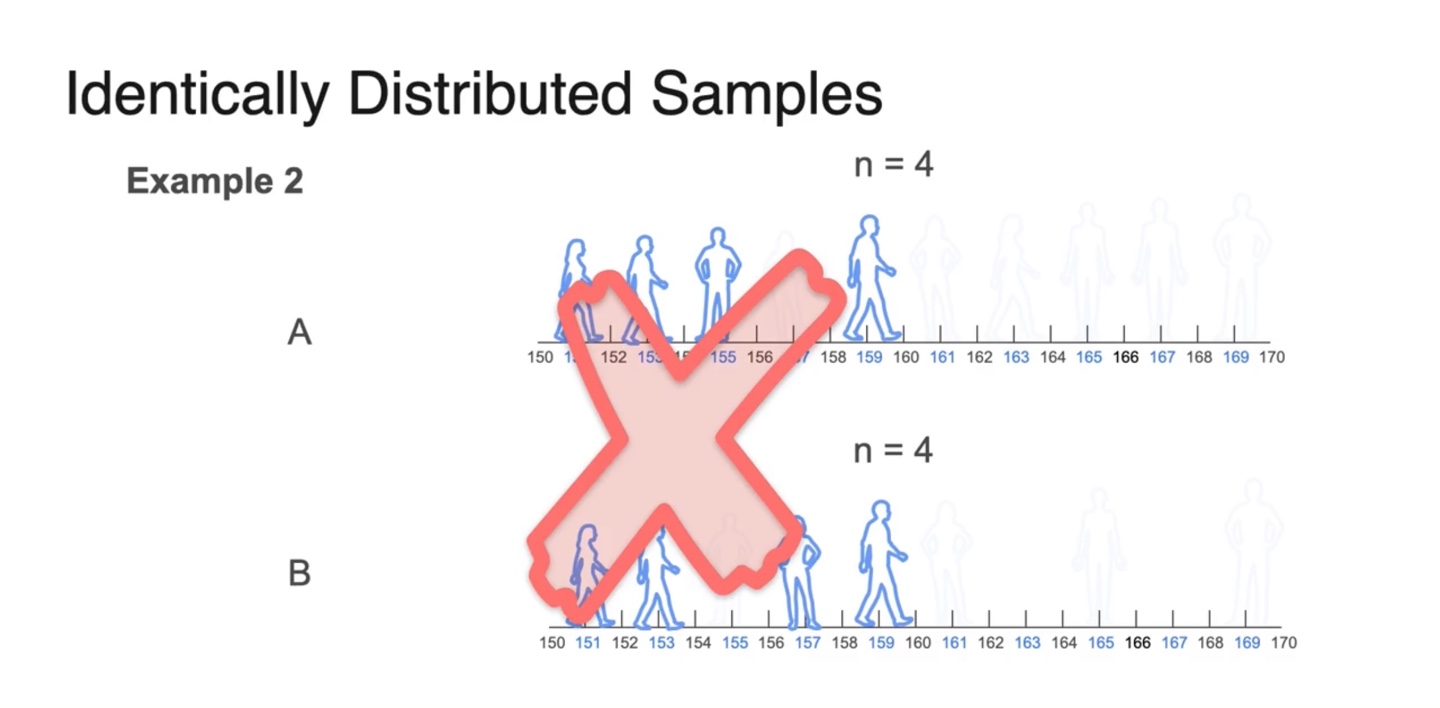
아래와 같이 특정 지역에 사람들만 국소적으로 sampling된다면 좋은 sampling이라고 볼 수 없다.
- 따라서 sample이 independent하고 identically distributed되어 있는지 확인해야만 한다.
- 예를 들어, Avocado Toast의 trend를 알고자 US 내의 avocado 가격의 통계를 알아보고 싶다고 가정해 보자.

-
Population은 무엇이라고 말할 수 있을까?
- 바로, 미국에서 판매되는 모든 아보카도가 연구 대상이 된다.
-
해당 예제에서의 sample은 무엇을 가리킬까?
-
4개의 store를 선정하여 그 곳에서 팔린 아보카도의 가격이 sample이다.
- 즉, population의 subset이다.
-

-
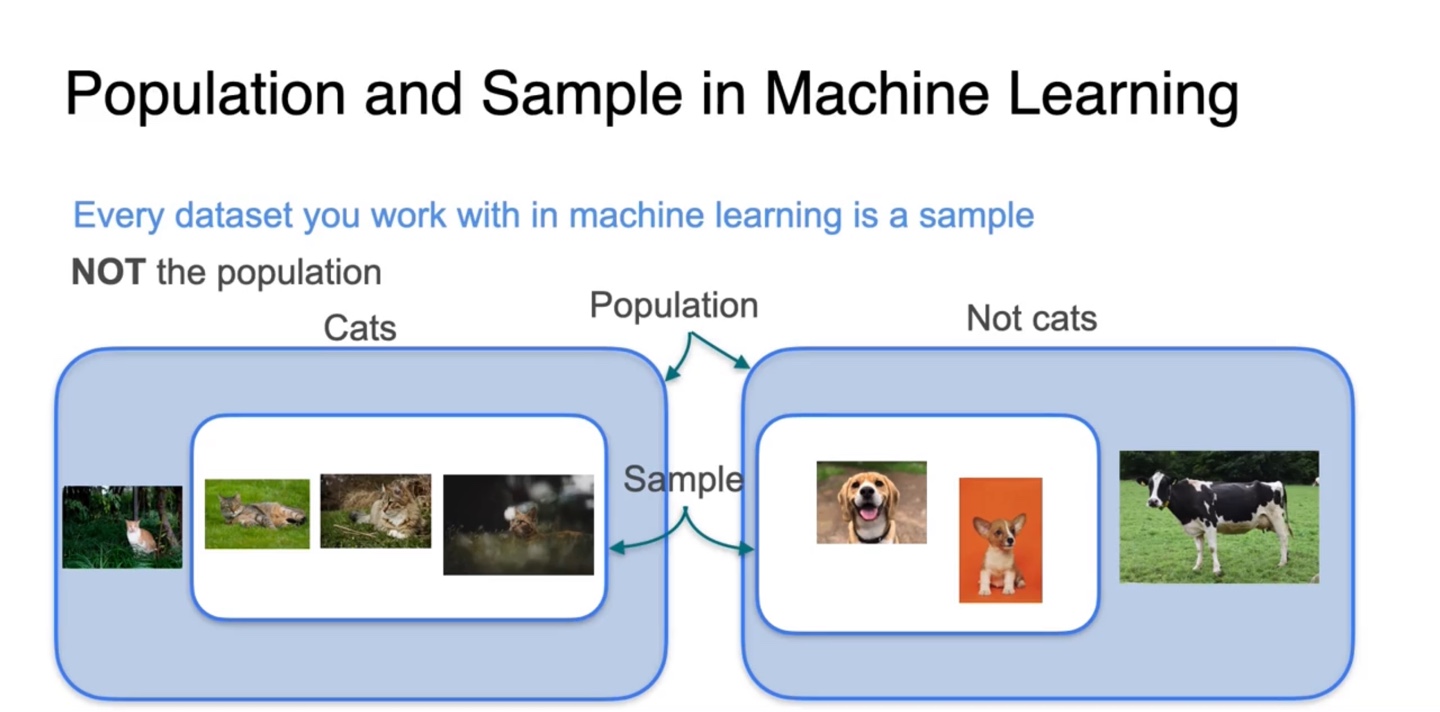
Population과 Sample은 머신 러닝에서 어떻게 쓰일까?
-
우리는 지구 상에 존재하는 모든 Cats와 Not cats의 수를 셀 수 없기 때문에, sample을 이용한 분류 및 추정만 가능하다.
-
이후에 다루는 "큰 수의 법칙"에 의해 population에 가장 가까운 근사치의 평균 혹은 분산과 같은 통계치들을 추정하는 과정이 머신 러닝인 것이다.
-
-
우리는 population의 수를 , sample 내 개수를 으로 표기할 것이다.
- Sample Population의 관계를 가진다.
Sample Mean
-
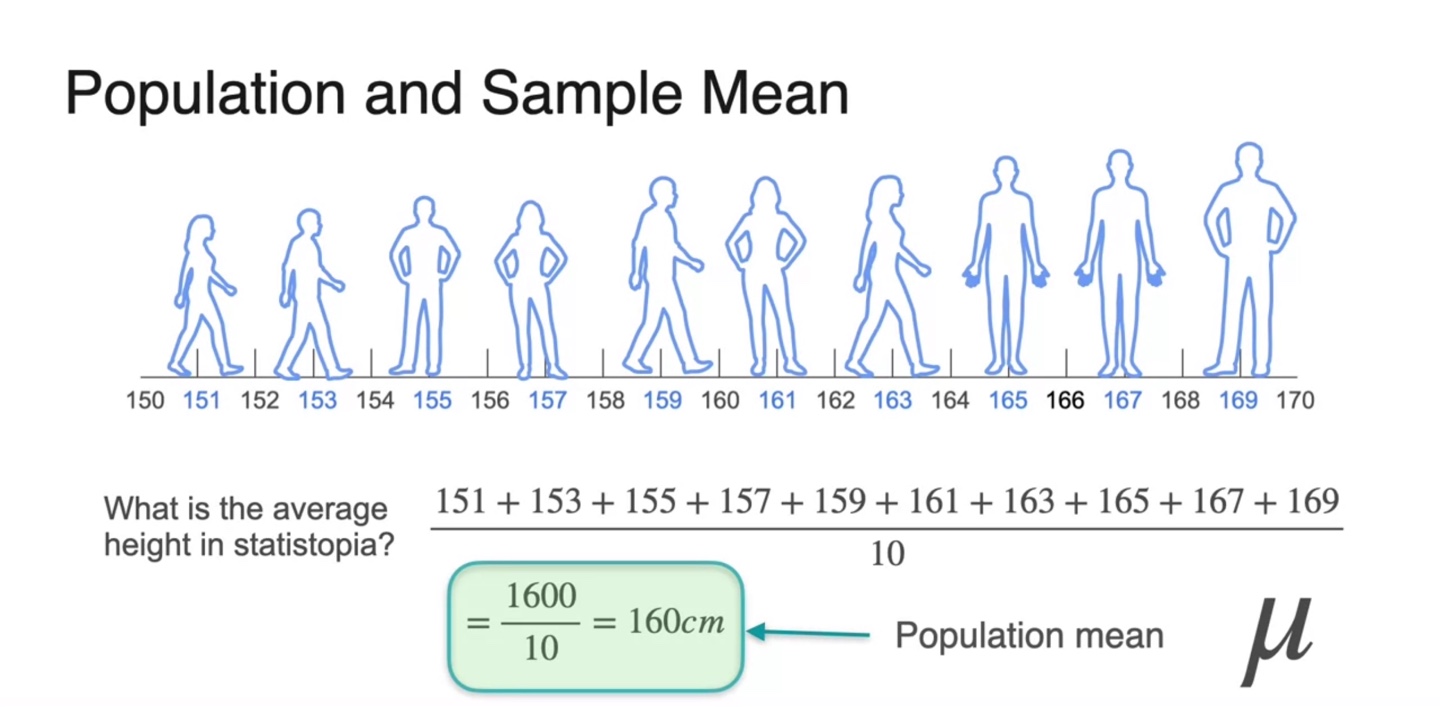
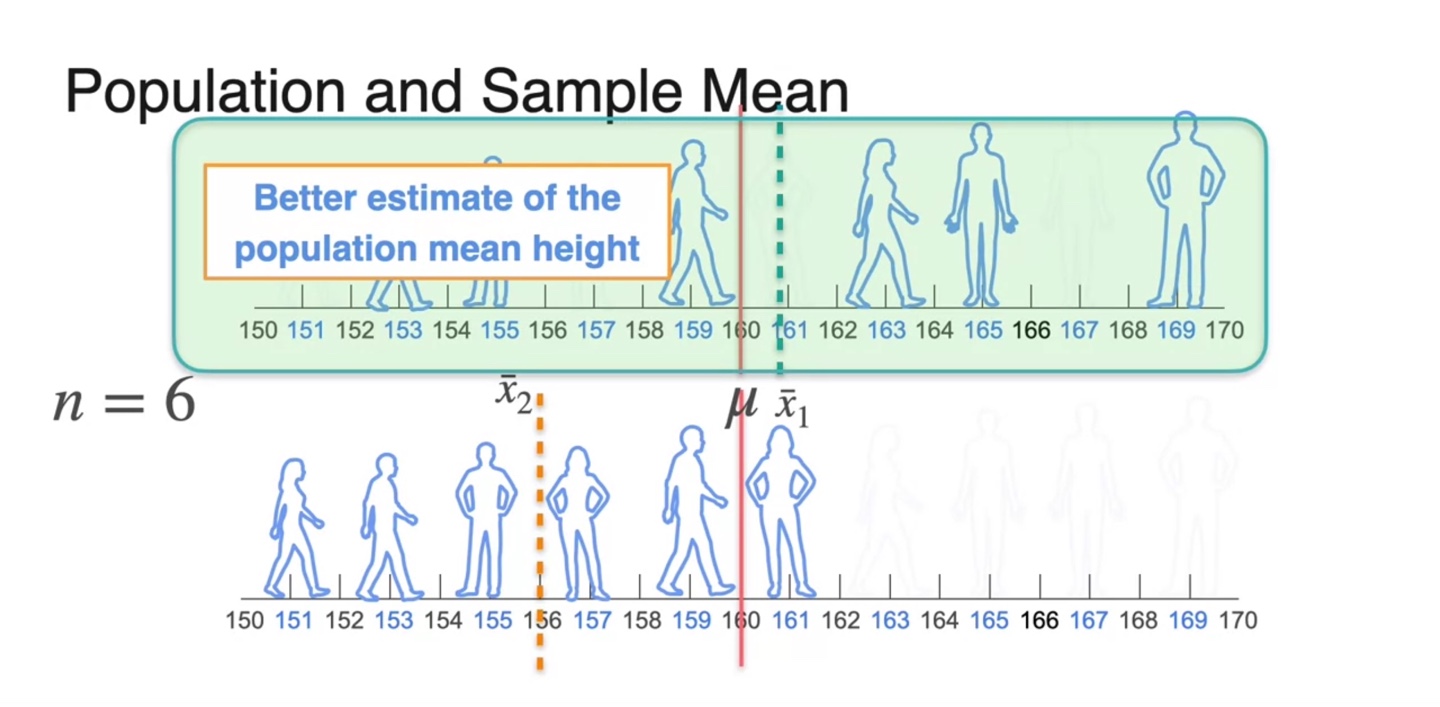
Statistopia의 사람들 키가 아래와 같이 조사되었다고 하자.
- 이들의 평균은 160cm로 계산되었고 우리는 이를 라는 mean값으로 표기한다.
-
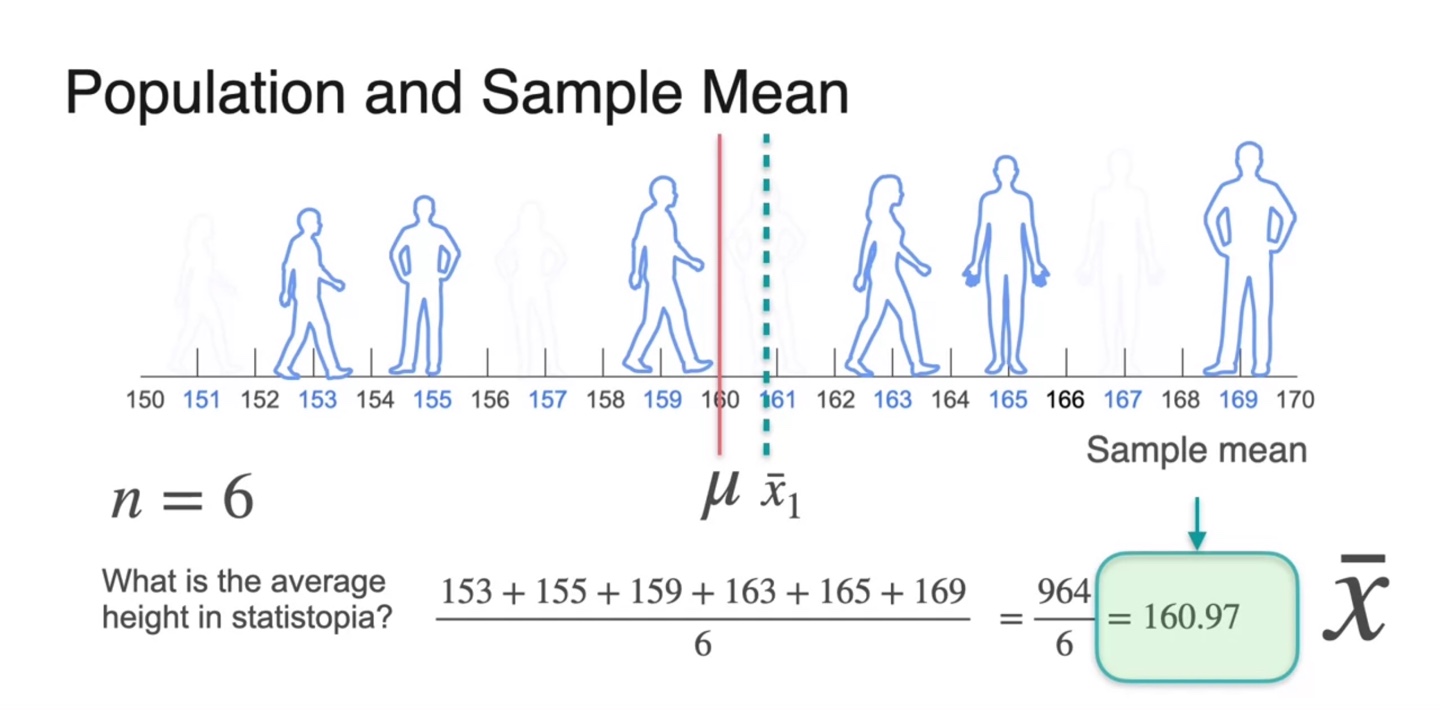
이 중 6명을 sample로 선정하여 평균치를 계산한 결과 160.97cm가 얻어졌다.
- 전체 population 평균 값 를 빨간 선으로 표기하였고, 첫 번째 sample을 통해 얻어진 표본 평균을 로 표기하여 수직선에 나타낸 결과가 아래와 같다.
-
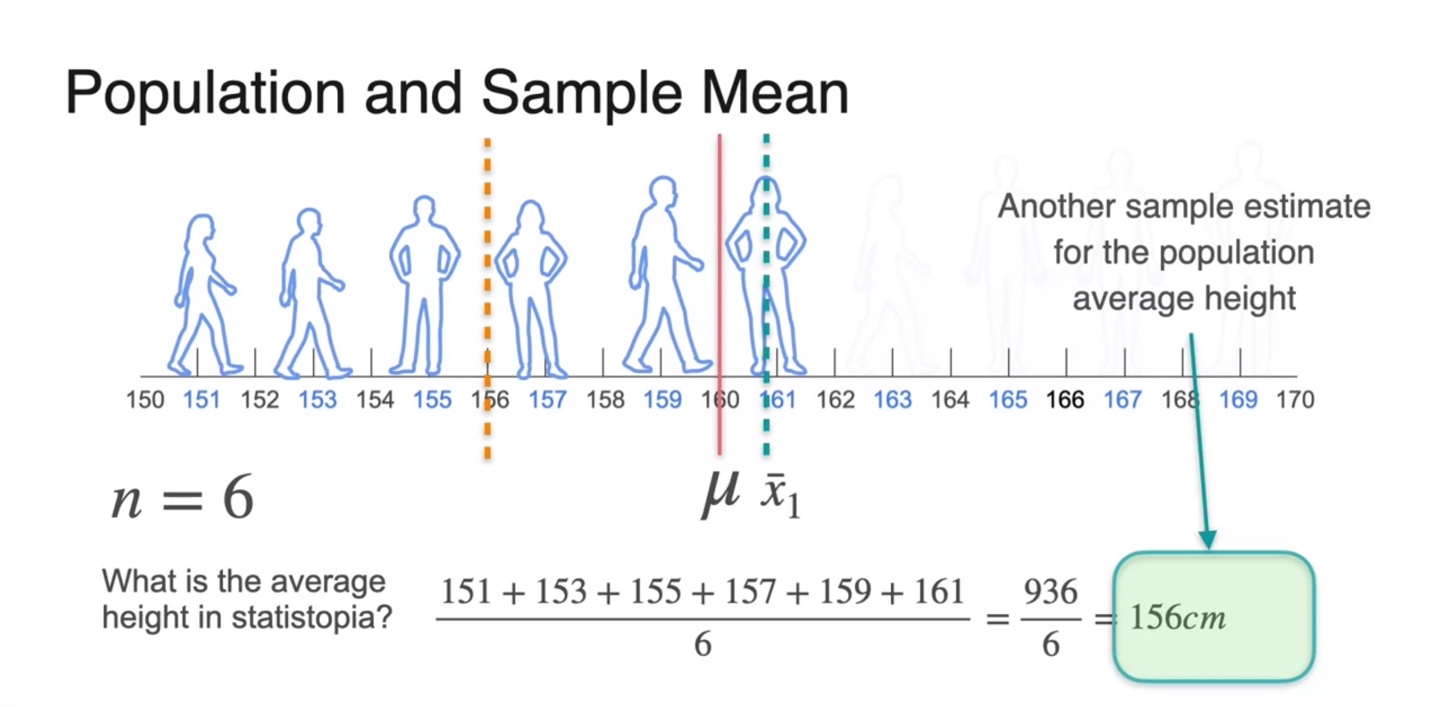
또 6명으로 두 번째 sample을 골라 표본 평균을 계산한 결과 156cm가 얻어졌다.
- 이를 로 표기하여 노란 점선으로 나타낸 결과는 아래와 같다.
-
첫 번째 sample과 두 번째 sample 중 population mean height를 더 잘 표현한 set은 무엇인가?
- 첫 번째 sample의 평균 이 에 더욱 가까우므로 첫 번째 sample이 population을 더 잘 표현한다고 볼 수 있다.
-
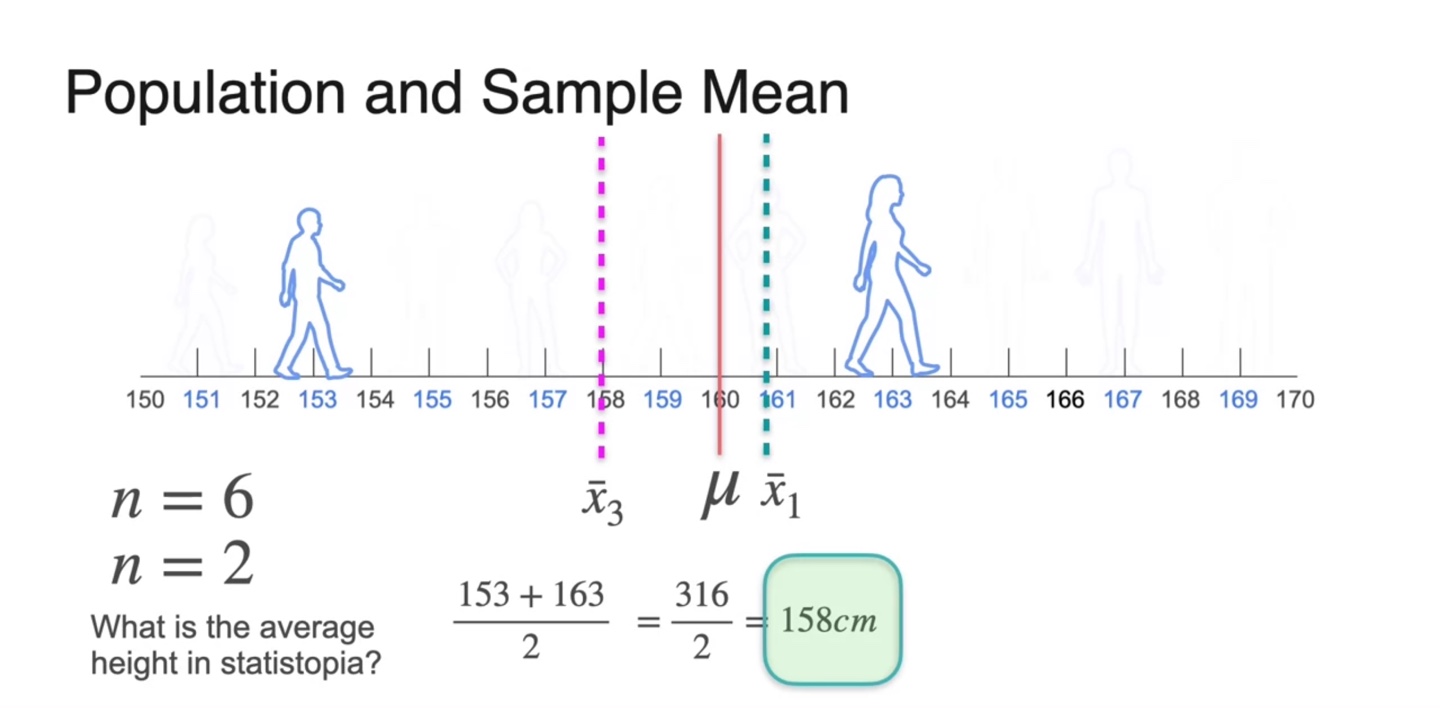
이번에는 2명으로 구성된 세 번째 sample을 골라, 평균치를 계산한 결과 158cm가 얻어졌다.
- 보다 이 population mean 에 가까우므로, 첫 번째 sample이 여전히 전체를 더 잘 표현하고 있다고 볼 수 있다.
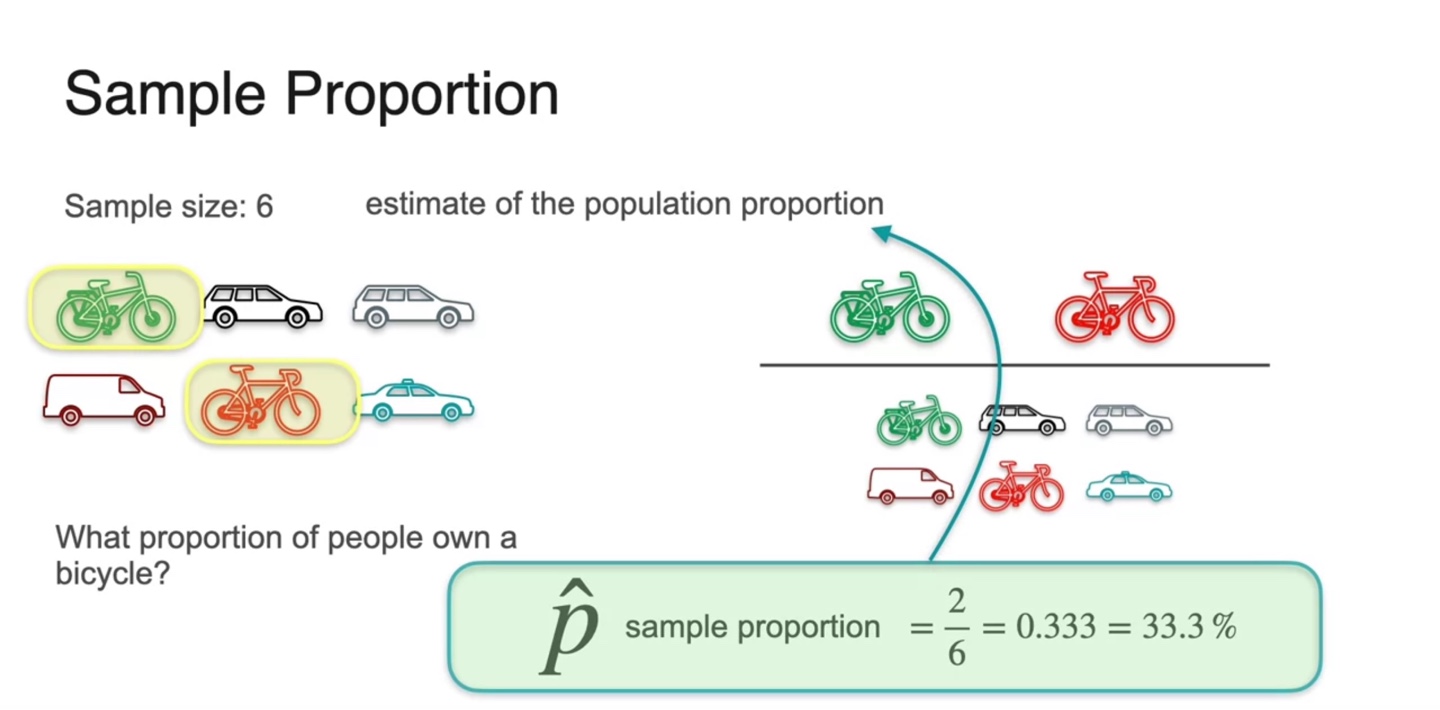
Sample Proportion
-
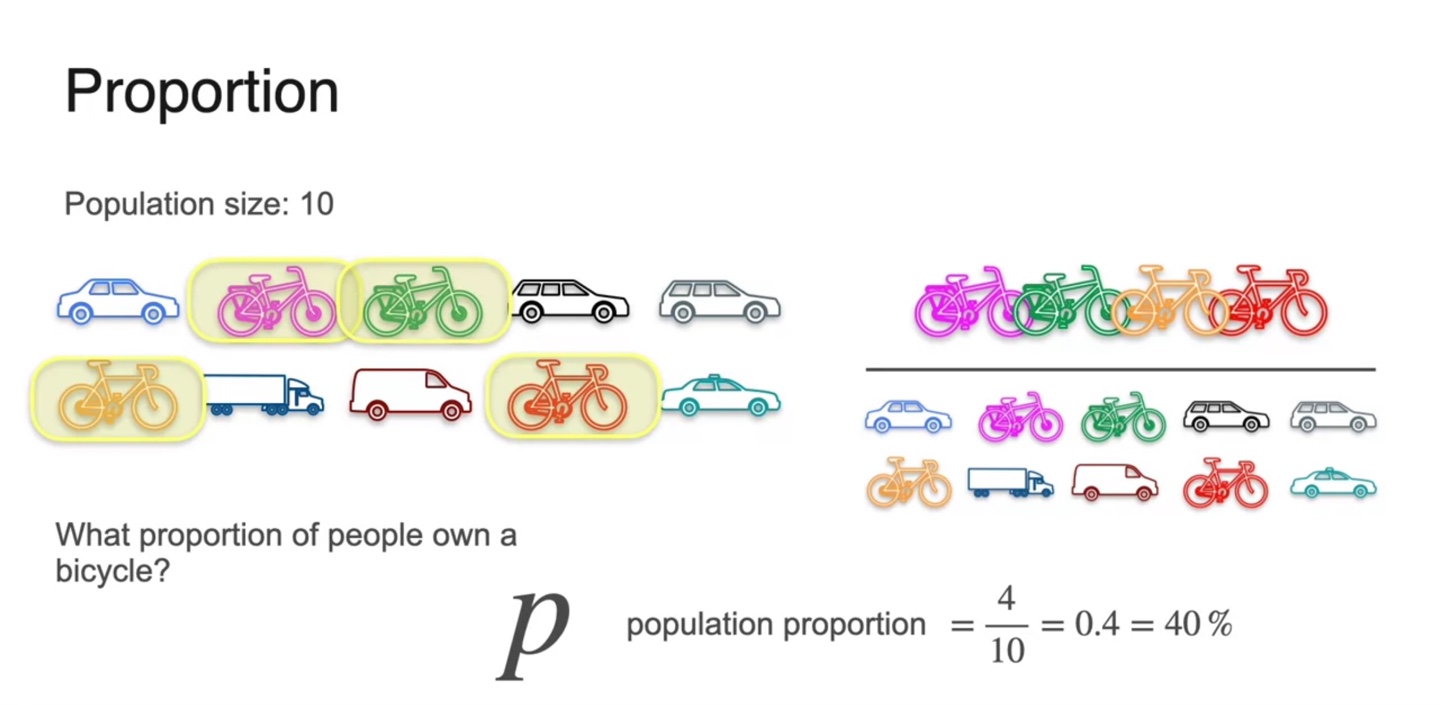
아래와 같이 전체 10명의 사람들이 어떤 대중교통을 이용하는지에 대한 통계를 내보자.
-
이 중 자전거를 타는 사람들의 비율은 전체 10명 중 4명이므로 다음과 같이 계산된다.
- Population proportion :
-
-
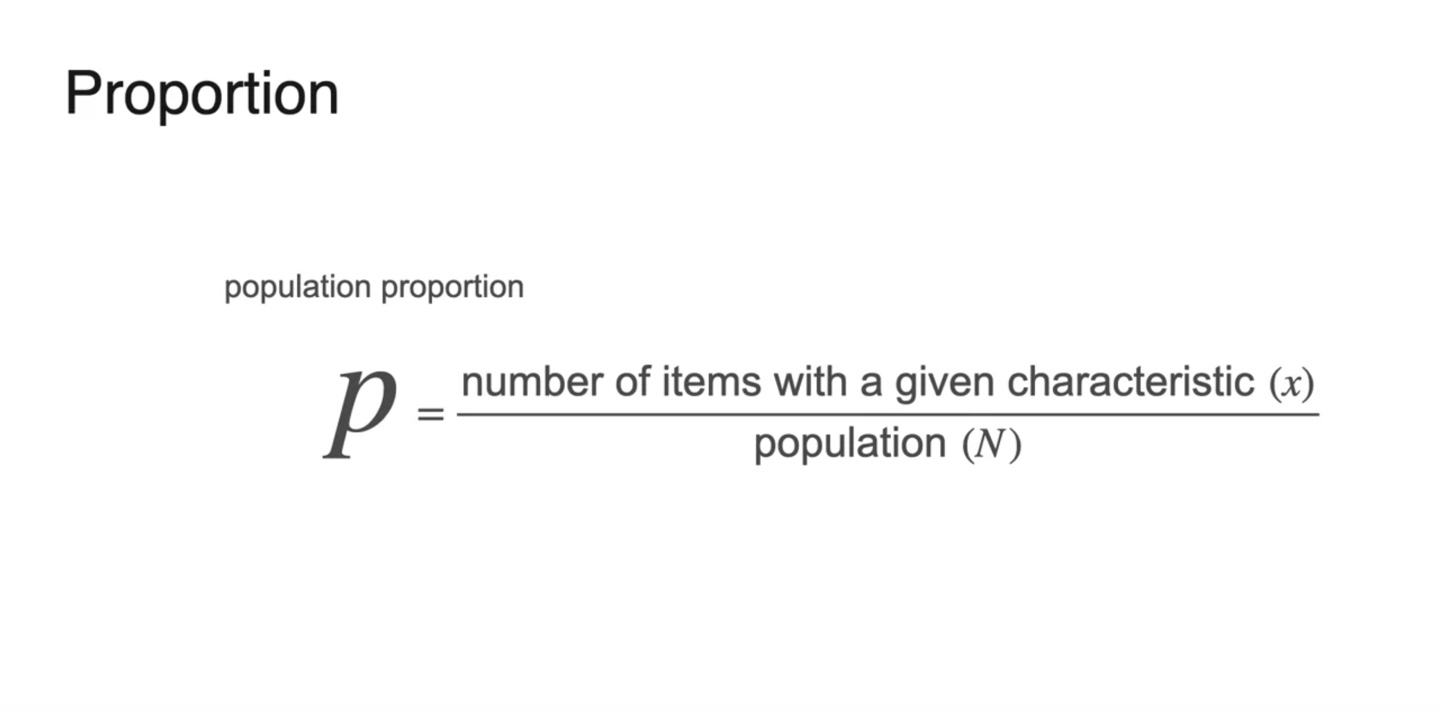
Proportion은 전체 population()개 중에 알고자 하는 item의 개수(number of )의 비중을 나타내는 값이다.
- 따라서 기호로는 라고 표기하며 두 값을 나누어 계산한다.
-
Sample의 proportion은 으로 표기한다.
- Sample size가 6일 때 자전거를 타는 사람의 수가 2라면, 의 값으로 계산되는 것이다.
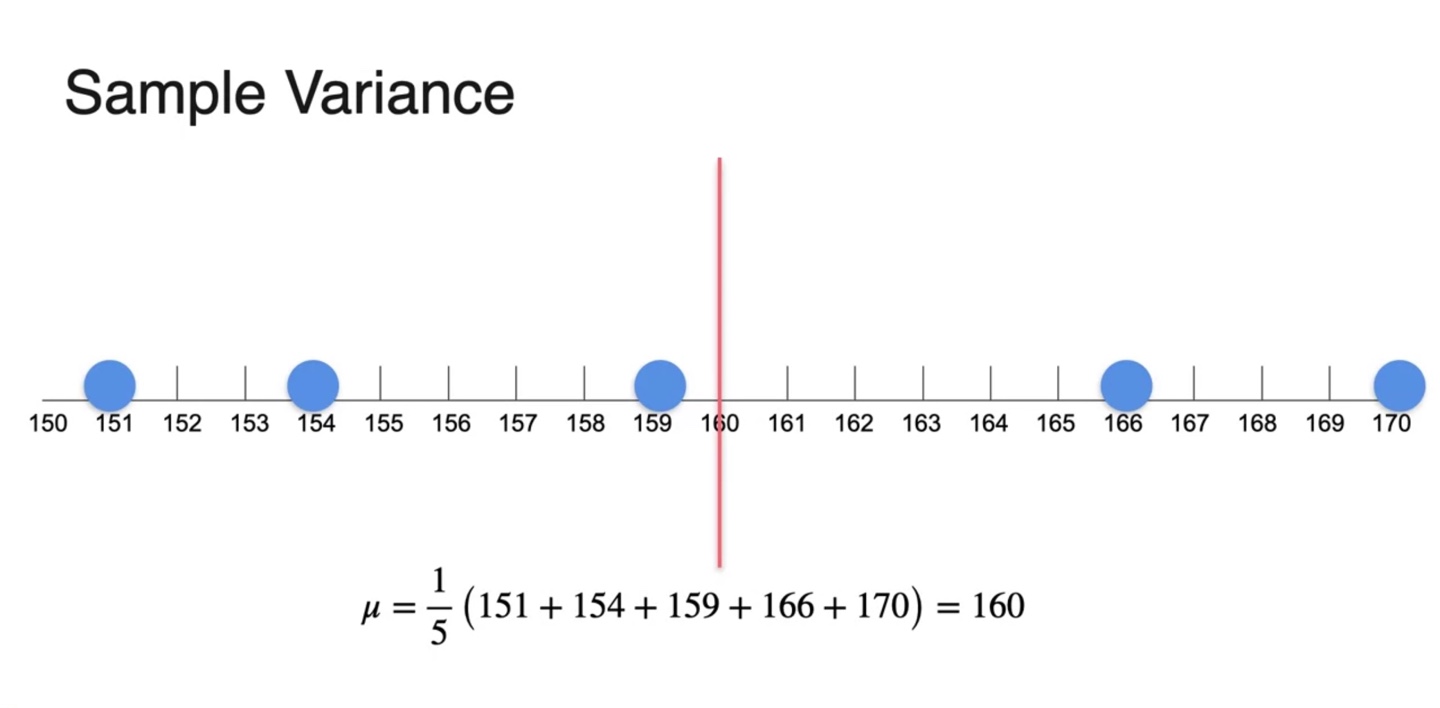
Sample Variance
-
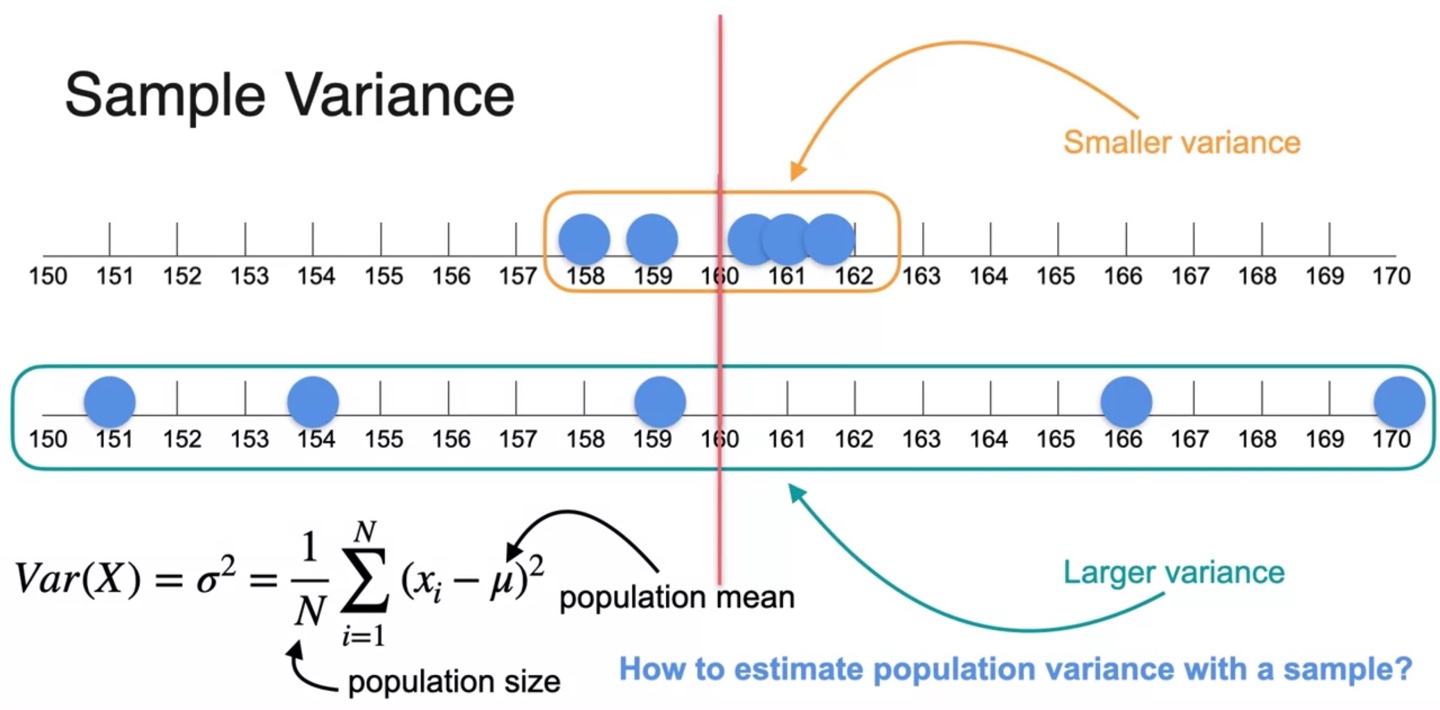
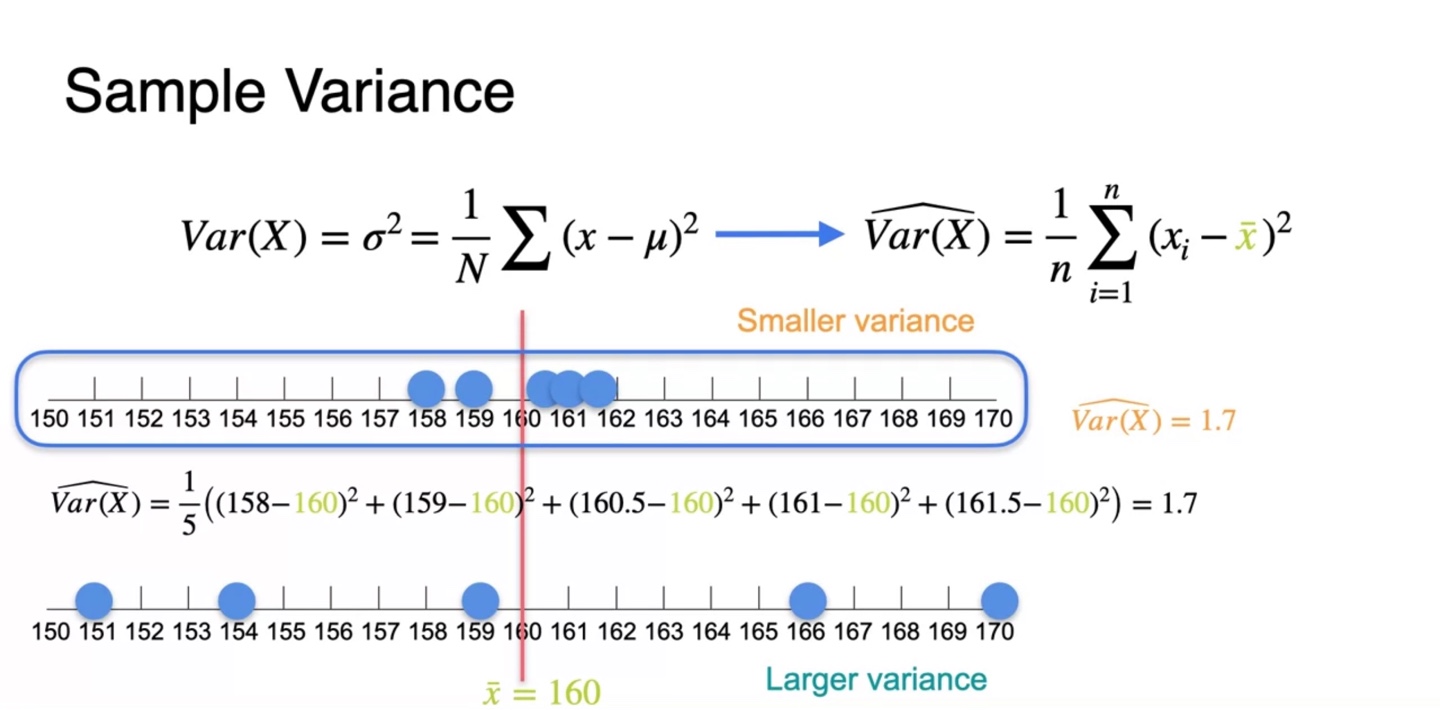
아래와 같은 5개의 samples의 평균을 구해보자.
- 평균 는 160으로 계산되었다.
-
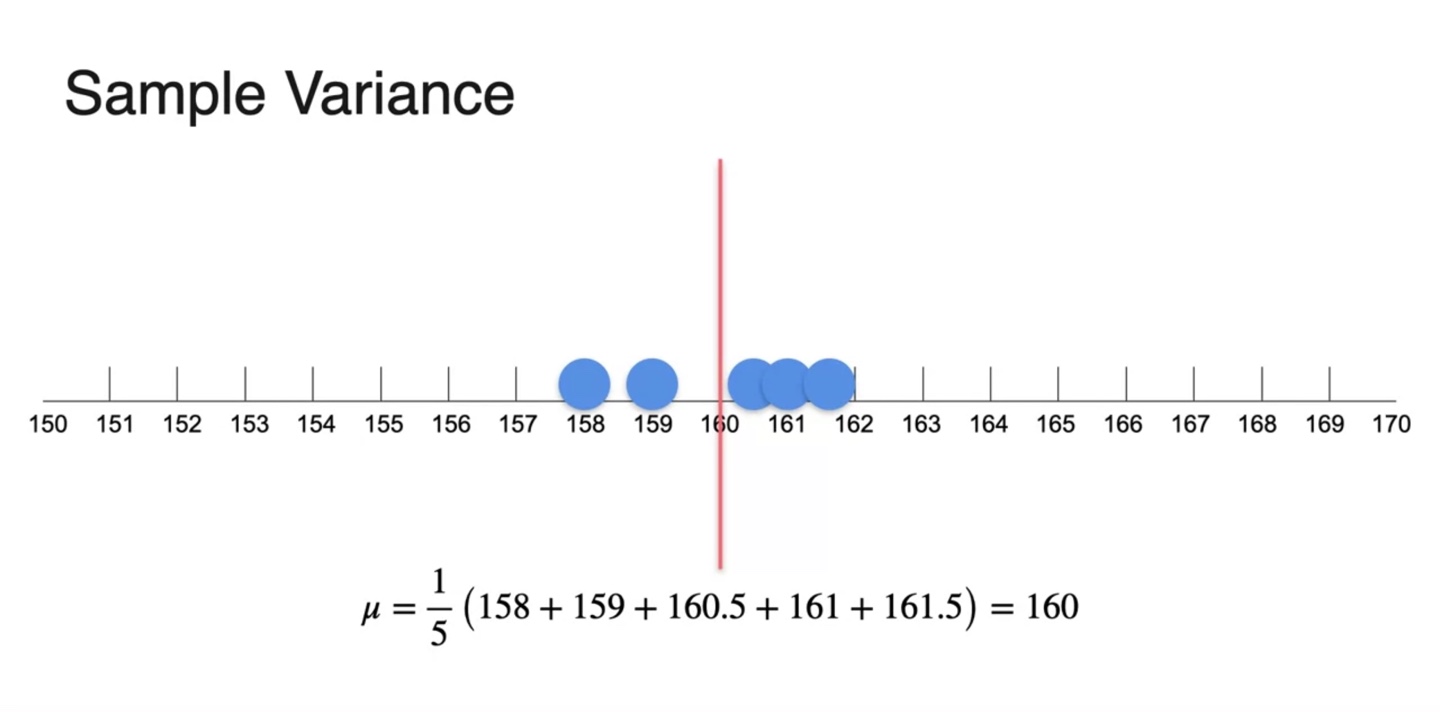
또 다른 sample의 평균을 구해보자.
- 두 번째 sample의 평균 또한 160으로 계산되었다.
-
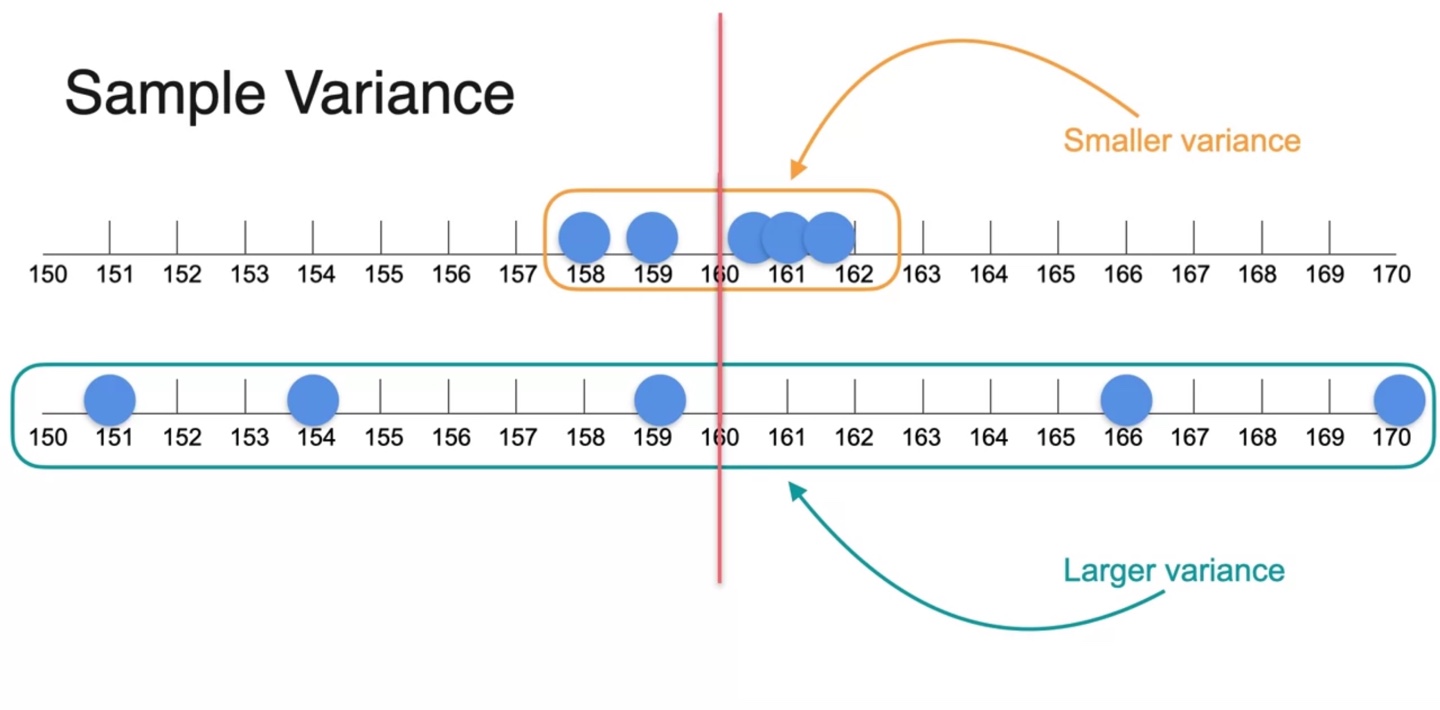
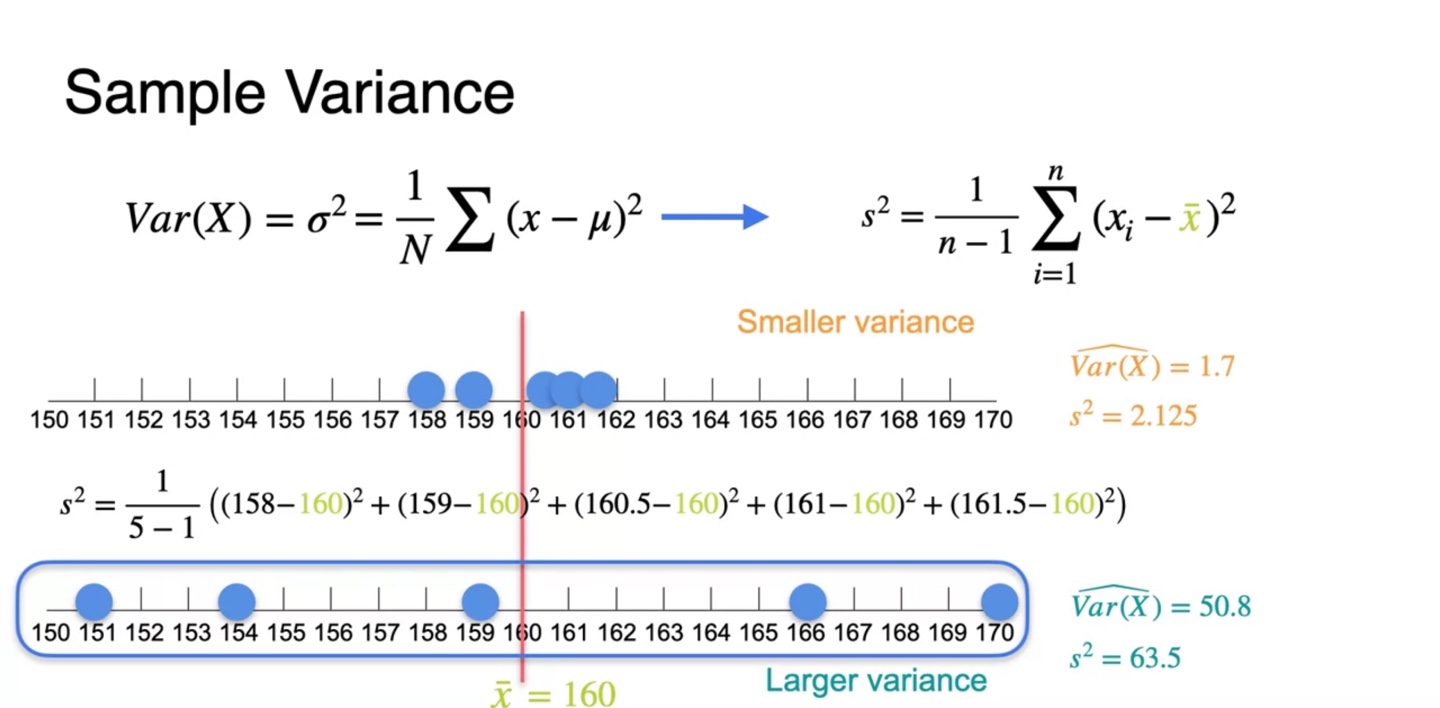
분포의 분산을 나타내는 variance는 평균으로부터 떨어진 거리에 영향을 받는다.
- 따라서 첫 번째 sample의 분산이 두 번째 sample의 분산보다 smaller variance를 가진다.
-
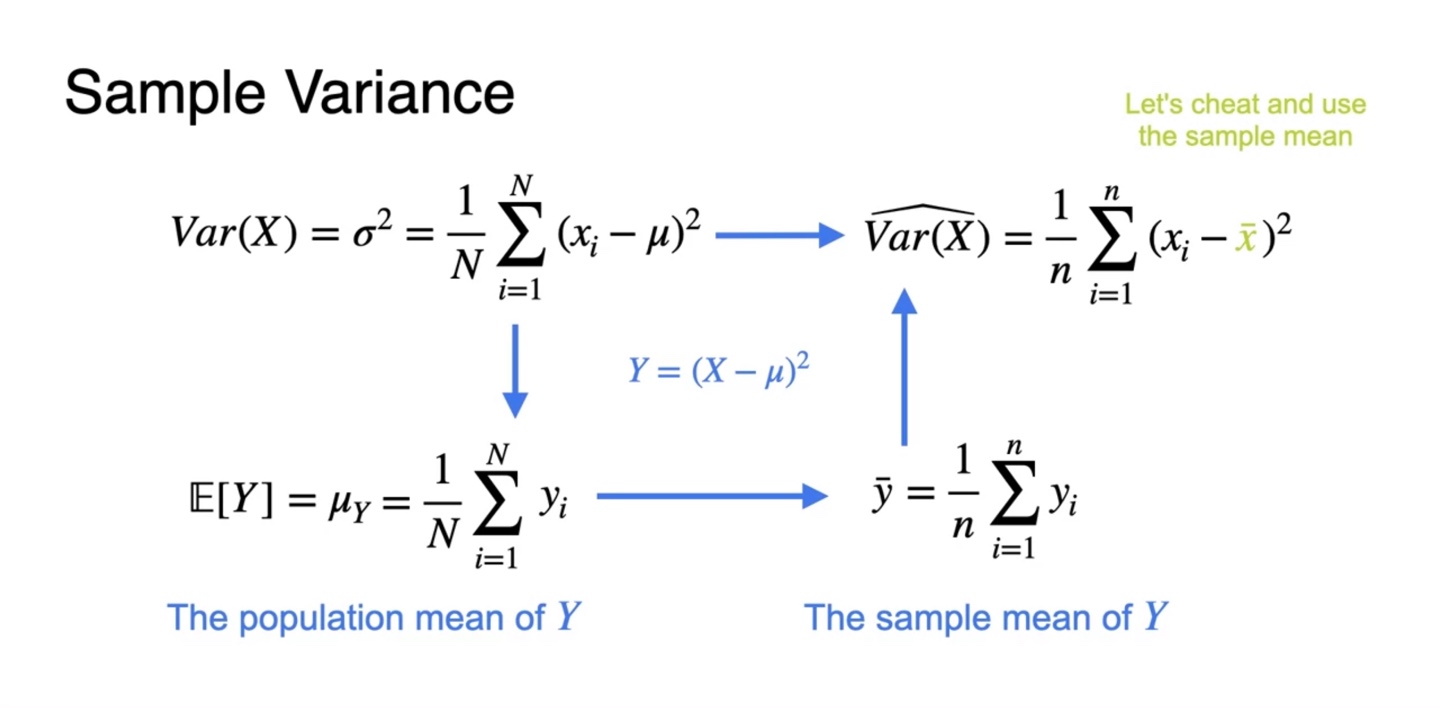
이를 수식으로 표현하면 로 정의된다.
- Population size 과 population mean 로 표현한 population variance는 위와 같이 구하였으나, sample의 분산은 어떻게 구해야 할까?
-
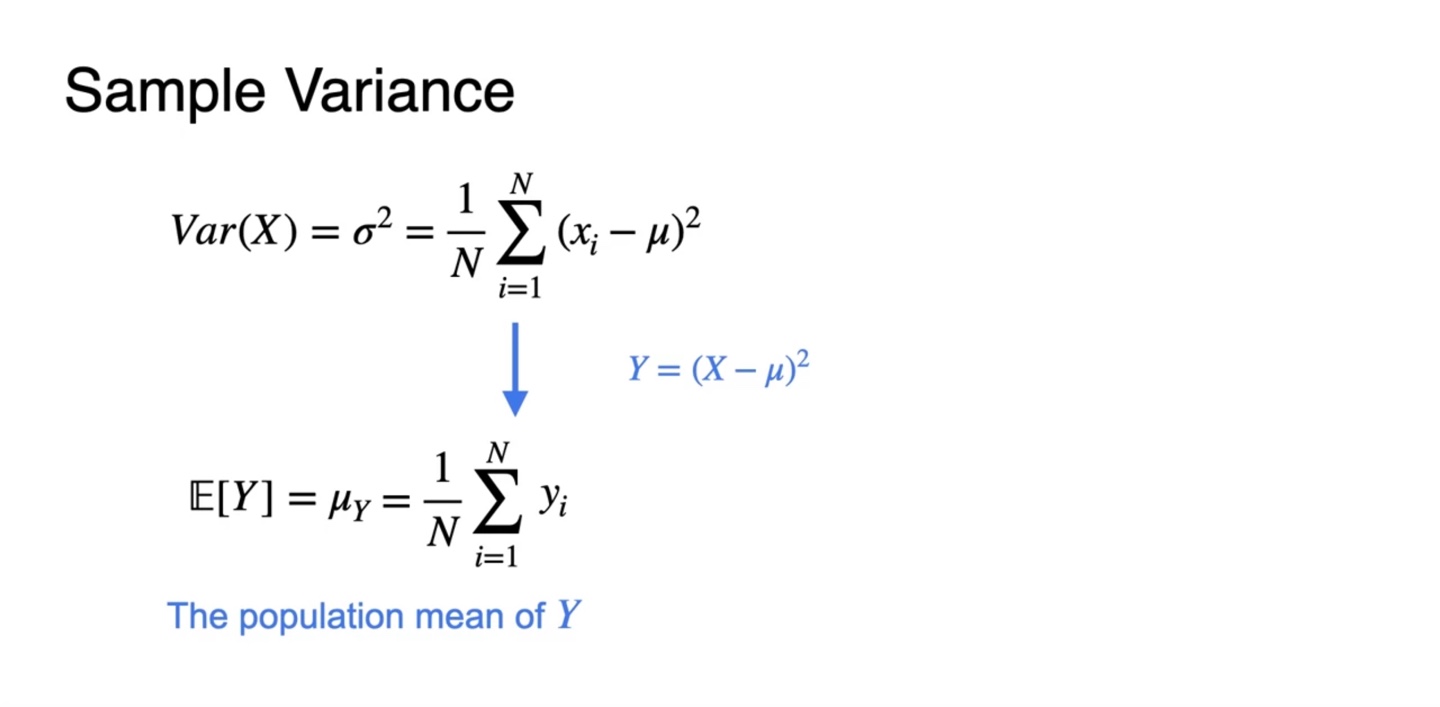
만약 확률 변수 가 과 같다고 한다면, population의 mean은 와 같다.
-
-
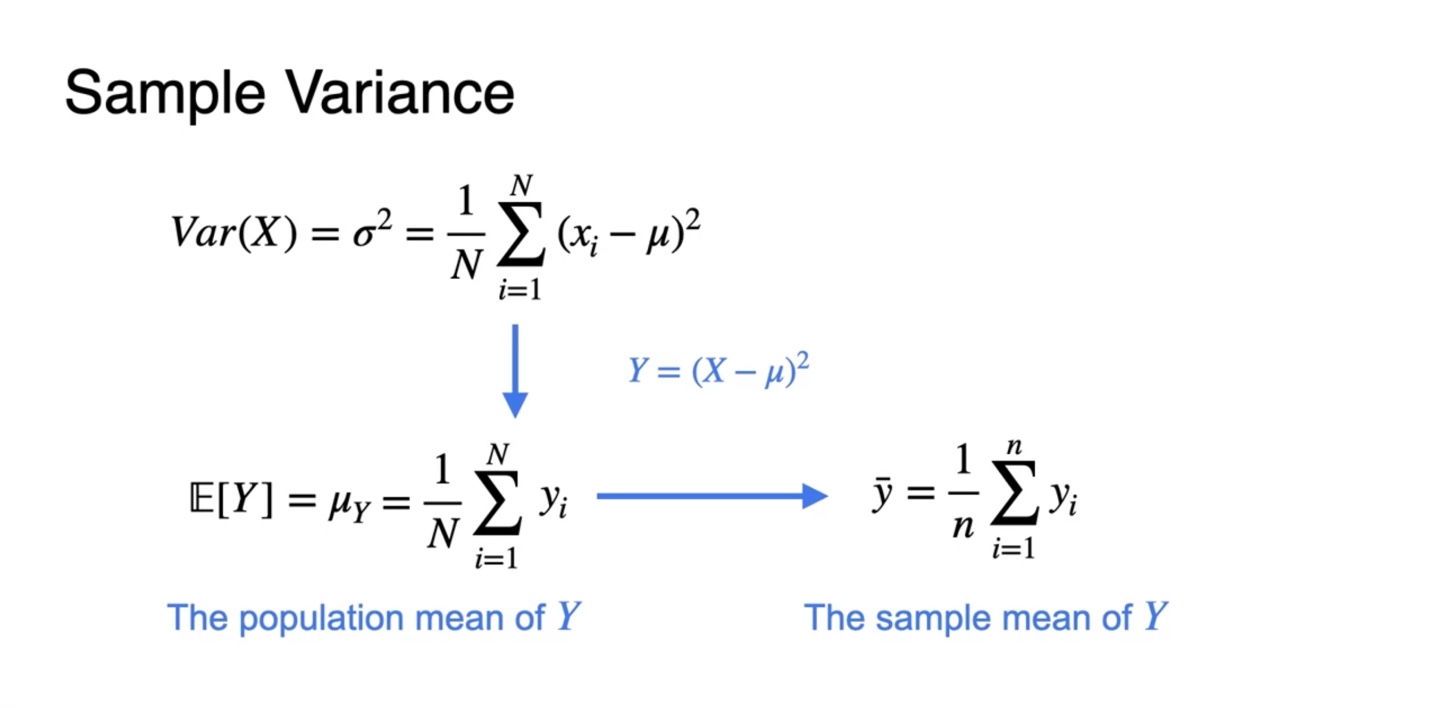
예를 들어, 개의 sample을 추출한 확률 변수 의 표본 평균을 구하고자 한다면 아래와 같은 수식을 구함으로써 해결할 수 있다.
-
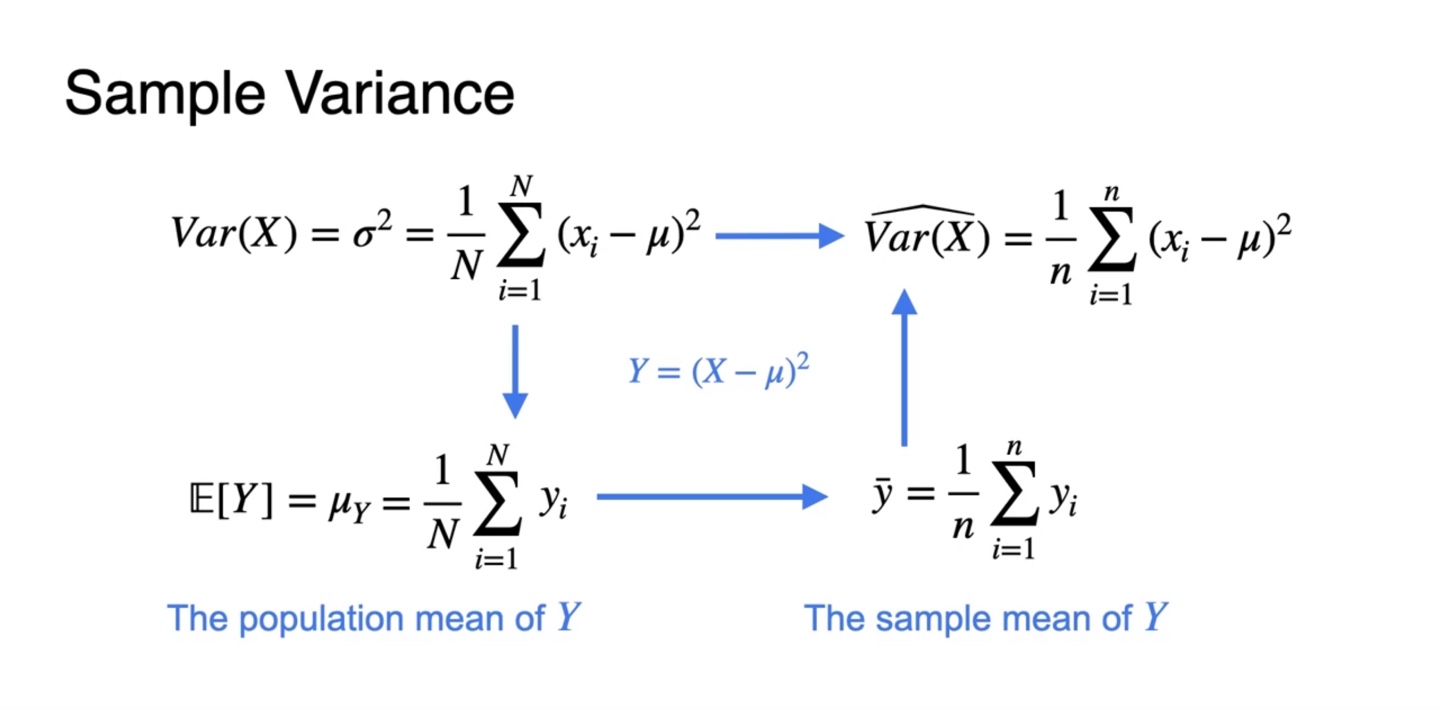
이를 다시 확률 변수 로 표현하면 기호로 표기하며 수식은 아래와 같다.
-
이 때 사용된 mean 는 popular mean이므로, sample mean인 를 이용할 필요가 있다.
- 따라서 와 같이 수식을 바꿔 variance를 다시 구해보도록 하자.
-
첫 번째 sample의 을 구하면 1.7로 계산된다.
- 이 때 사용된 평균값은 를 대체한 sample mean 다.
-
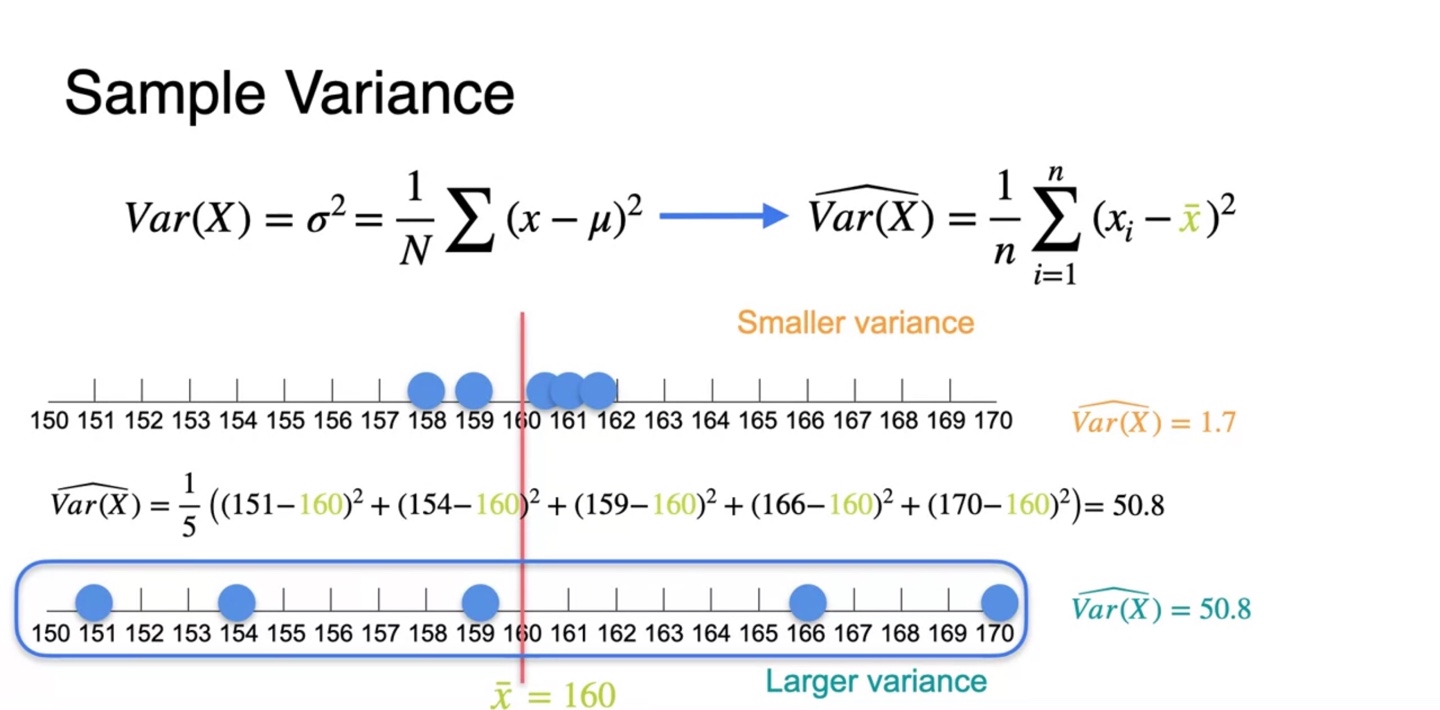
두 번째 sample의 는 50.8로 계산된다.
-
마찬가지로 sample 평균값 은 160이며 위 예시에 비해 각 변수들 사이의 관계가 약 7배만큼 차이가 나는 것을 알 수 있다.
- 이를 통해 variance는 배의 값으로 추정된다는 점도 계산 없이 알아낼 수 있다.
-
-
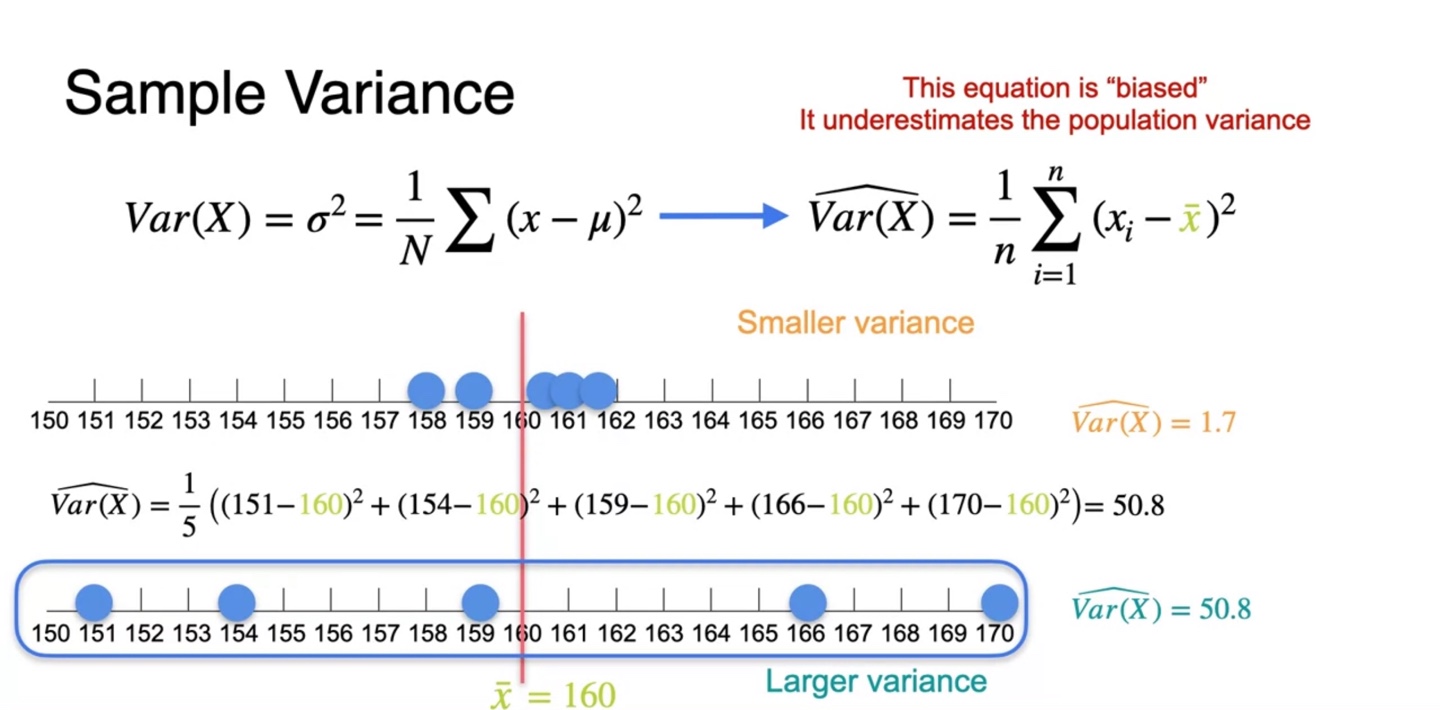
그러나 현재 sample variance를 구하는 공식은 다소 "biased"되어 있다고 표현한다.
- 현재의 공식으로는 population variance를 정확하게 계산할 수 없다!
-
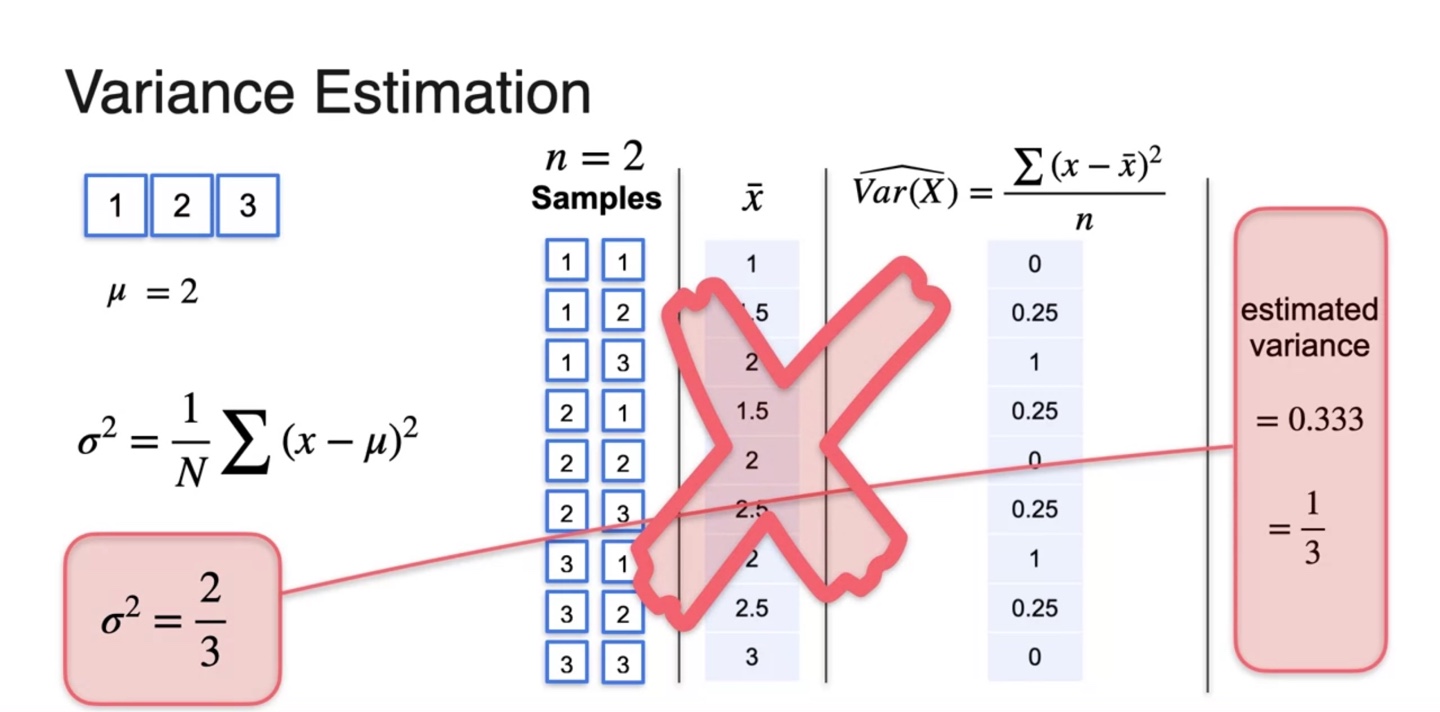
아래와 같은 예를 들어보자.
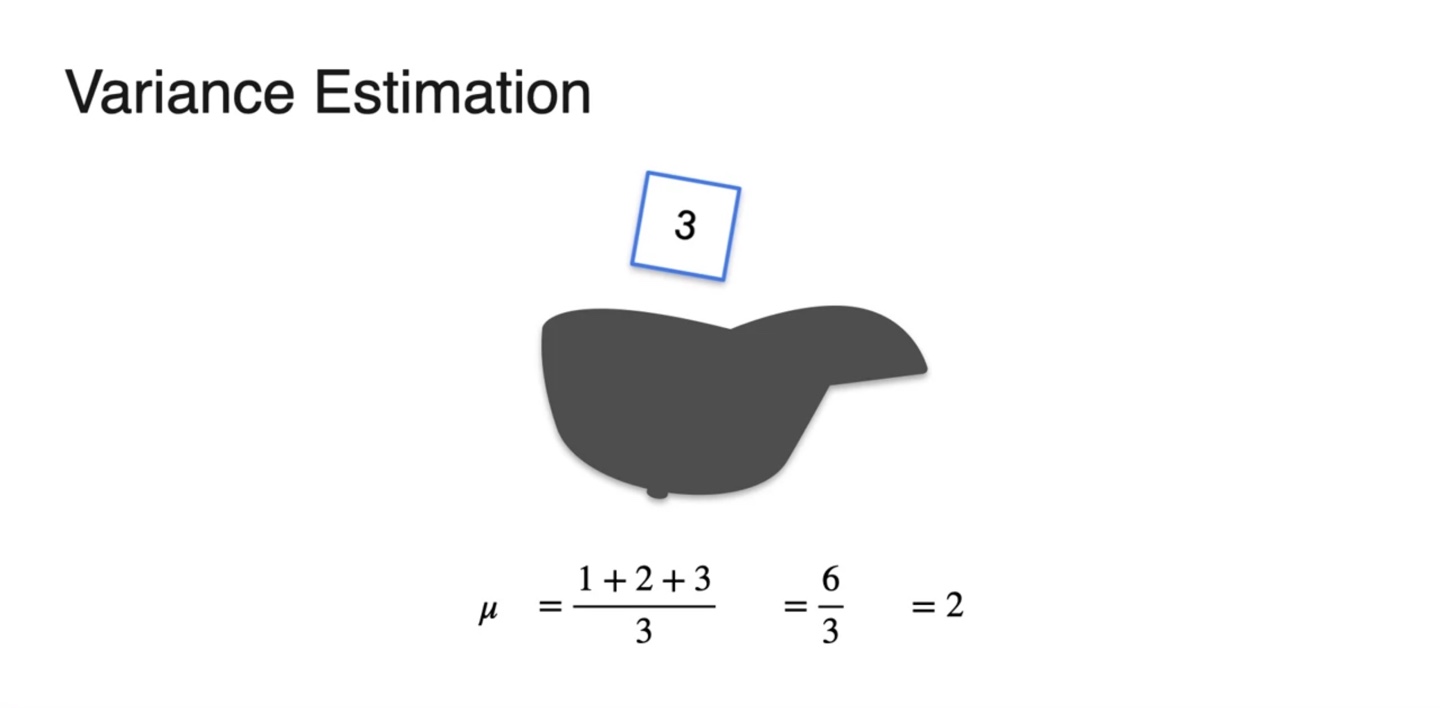
- 모자에 1, 2, 3 카드를 넣고 하나씩 뽑는 상황이다.
- 한 번의 시행에서 얻을 수 있는 평균값 는 로 계산된다.
-
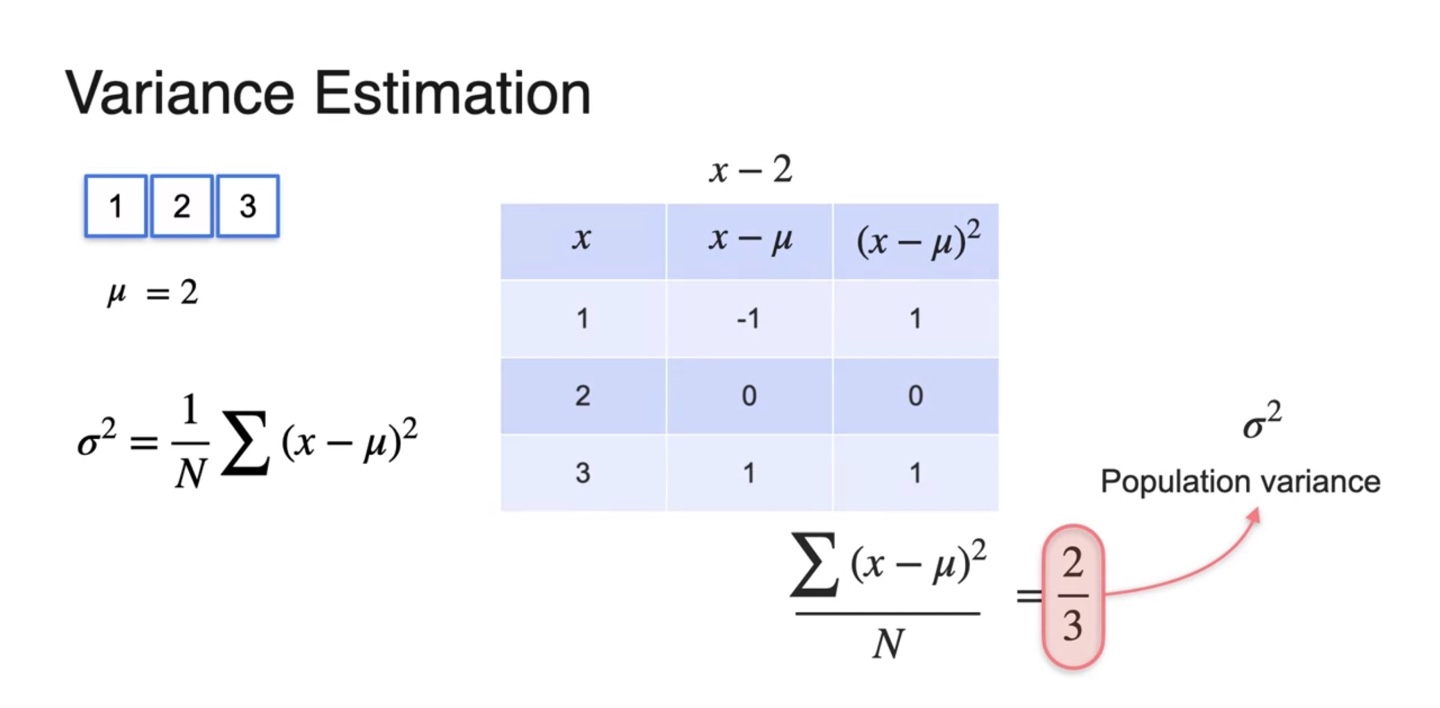
Variance는 각 확률 변수와 평균 의 차이를 제곱한 평균으로 계산한다.
- 이를 통해 population variance()를 계산한 결과 으로 계산되었다.
-
이제 의 크기로 sample을 뽑아 각 sample의 평균을 계산하여 sample mean 과의 차이로 variance를 구해보자.
- 계산 결과 로 계산되었으나 실제 population variance 와 다소 차이를 보인다.
-
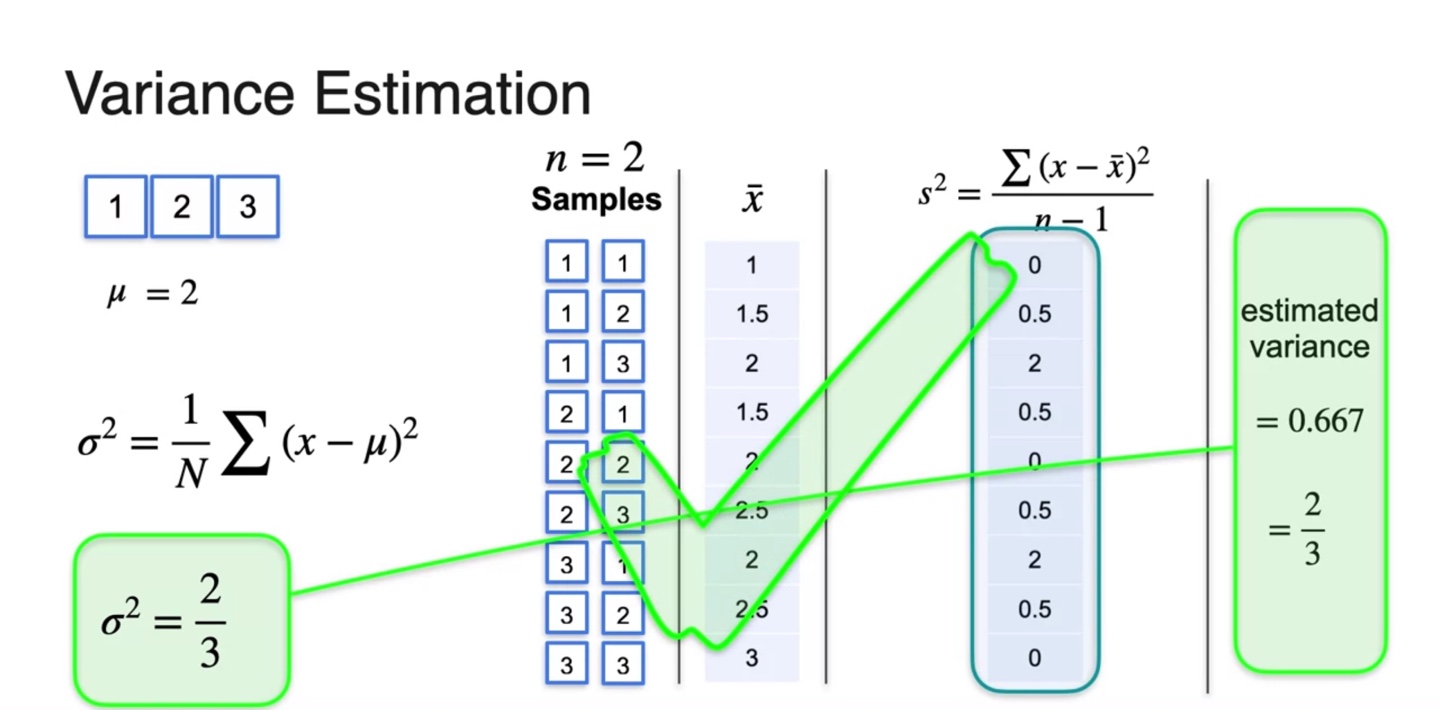
여기서 중요한 개념인 sample variance에 대한 수식이 나온다.
-
즉, 이 아닌 로 나누는 조정 작업이 필요하다!
- 이렇게 되면 실제 population variance인 의 값을 얻어낼 수 있음을 알 수 있다.
-
-
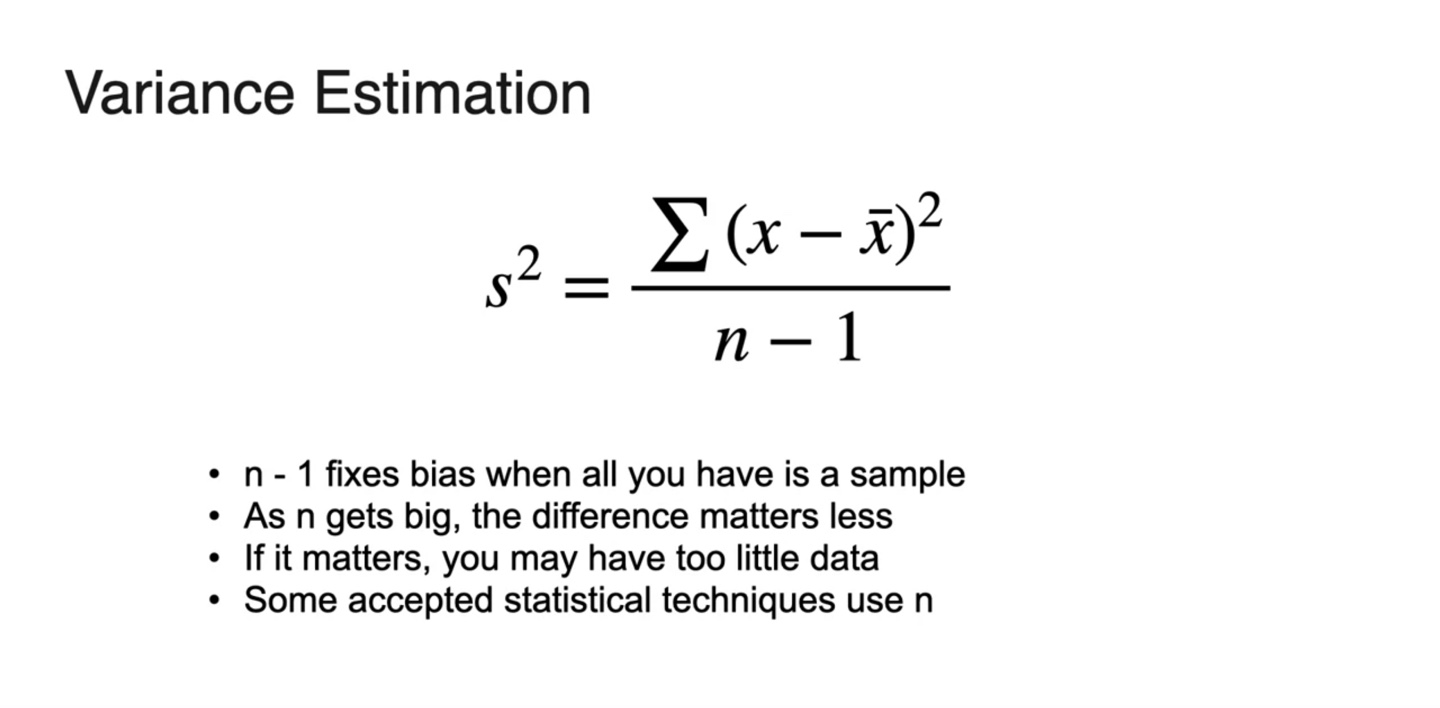
의 역할은 bias를 fix하는 의미를 갖는다.
- 매우 적은 data라면 과 의 차이가 크게 나타날 것이므로, statistical technique인 을 나눠주는 과정이 필요하다.
-
위와 같은 수식으로 기존 예제의 sample variance를 다시 계산한 결과 1.7에서 2.125로, 50.8에서 63.5로 증가했음을 알 수 있다.
- 이 아니라 로 나누었기 때문에 분모가 더 작아져 값이 커진 것이라 이해하면 된다.
-
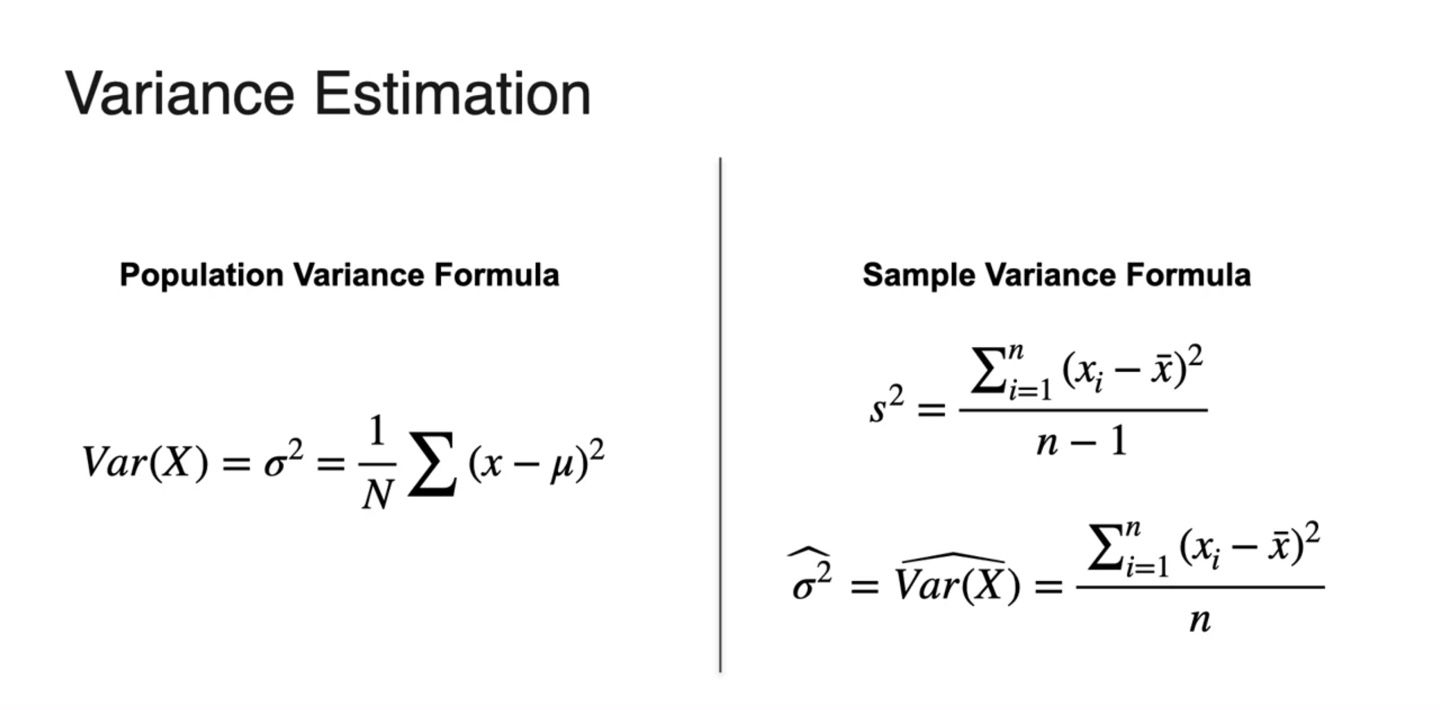
Population variance와 Sample variance의 formula는 아래와 같은 차이를 가진다.
-
Population variance :
-
Sample variance : or
- 데이터가 충분히 크다면 으로도 sample variance를 나타내는 데에 문제가 없을 수 있으나 을 활용하는 것이 common sample variance라고 한다.
-
Law of Large Numbers
-
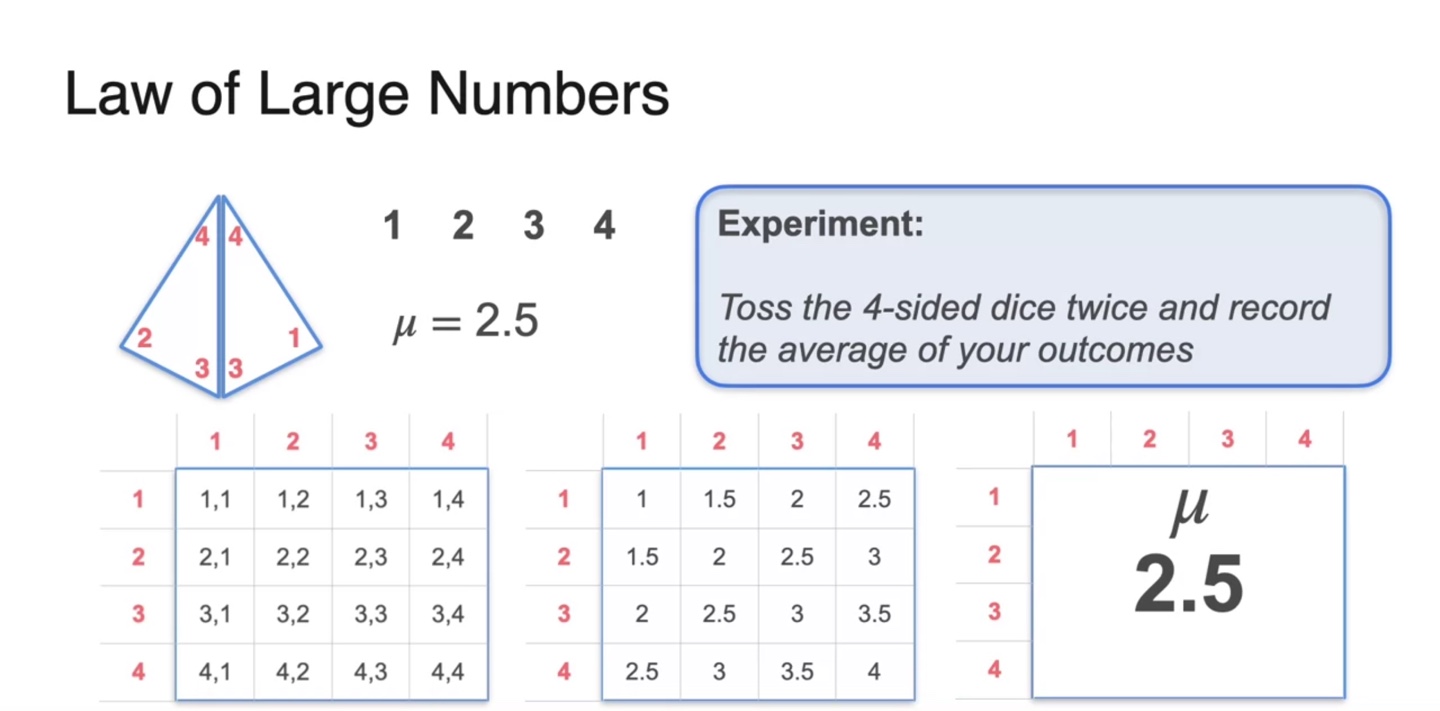
Law of Large Numbers, 큰 수의 법칙에 대해 알아보자.
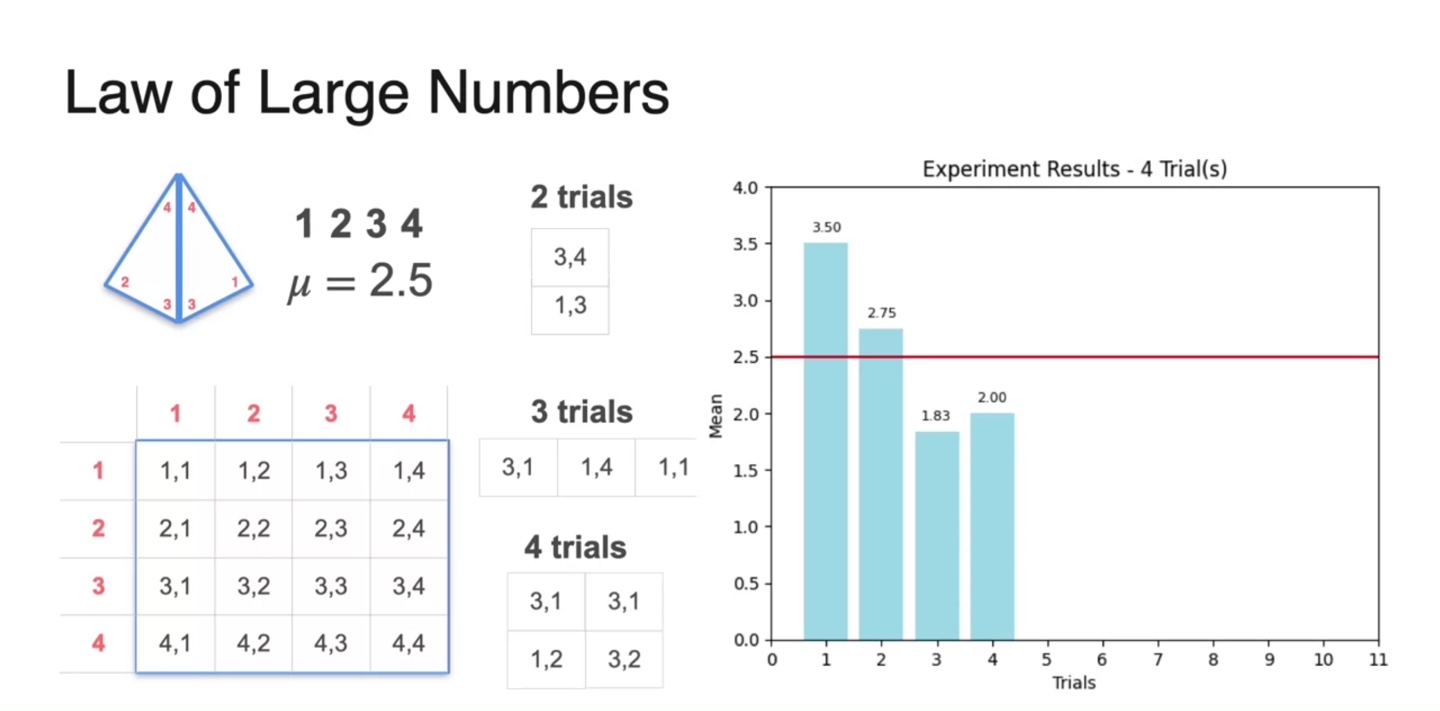
- 4개의 variables를 갖는 dice를 굴리는 상황에서, 다음과 같은 의 sample 평균치를 얻어 전체 population mean 를 계산한 결과 2.5가 얻어졌다.
-
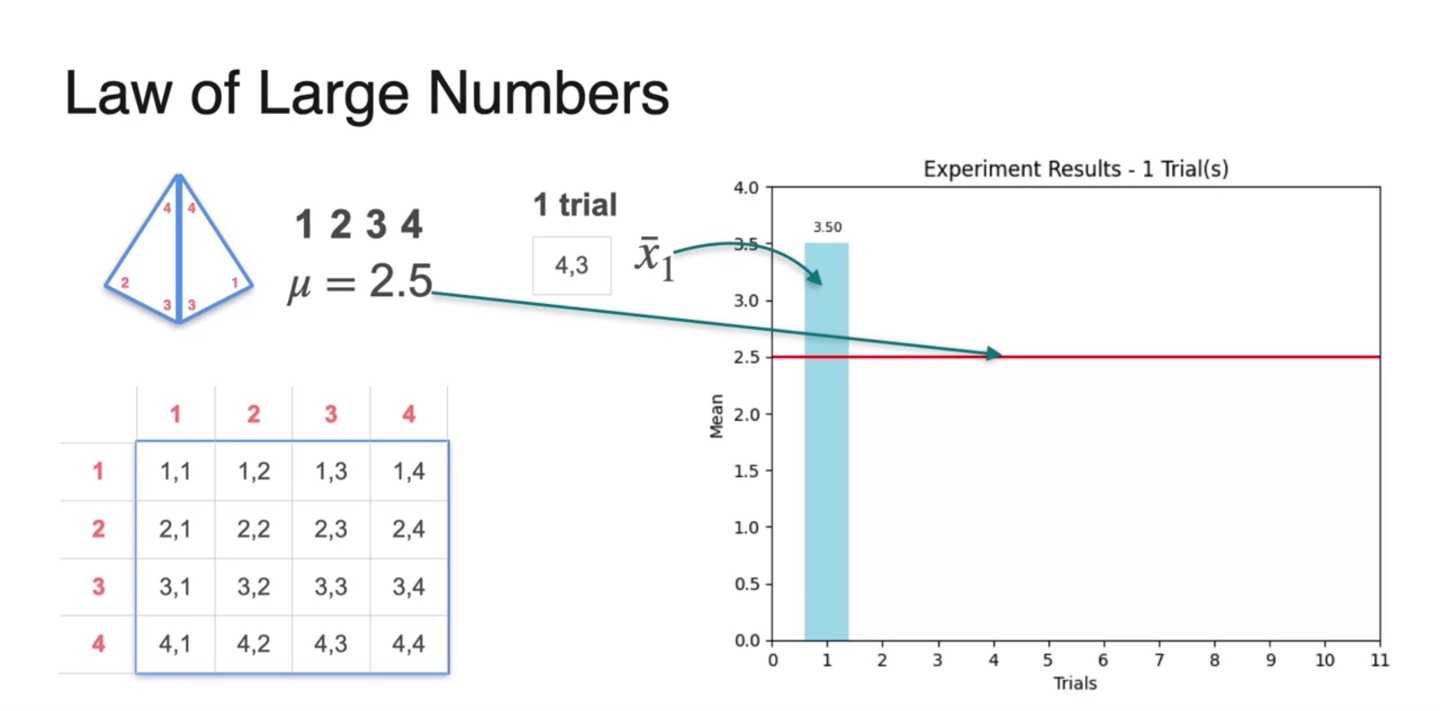
Population mean인 를 빨간색 선으로 표현하여 여러 sample 값들의 평균을 기록해보자.
- 1번의 trial로 (4, 3)의 sample이 얻어졌고, 평균낸 결과()를 오른쪽에 나타내었다.
- 그런 다음 2번의 trial을 가중 평균으로 구한 값, 2.75를 오른쪽에 표현하였다.
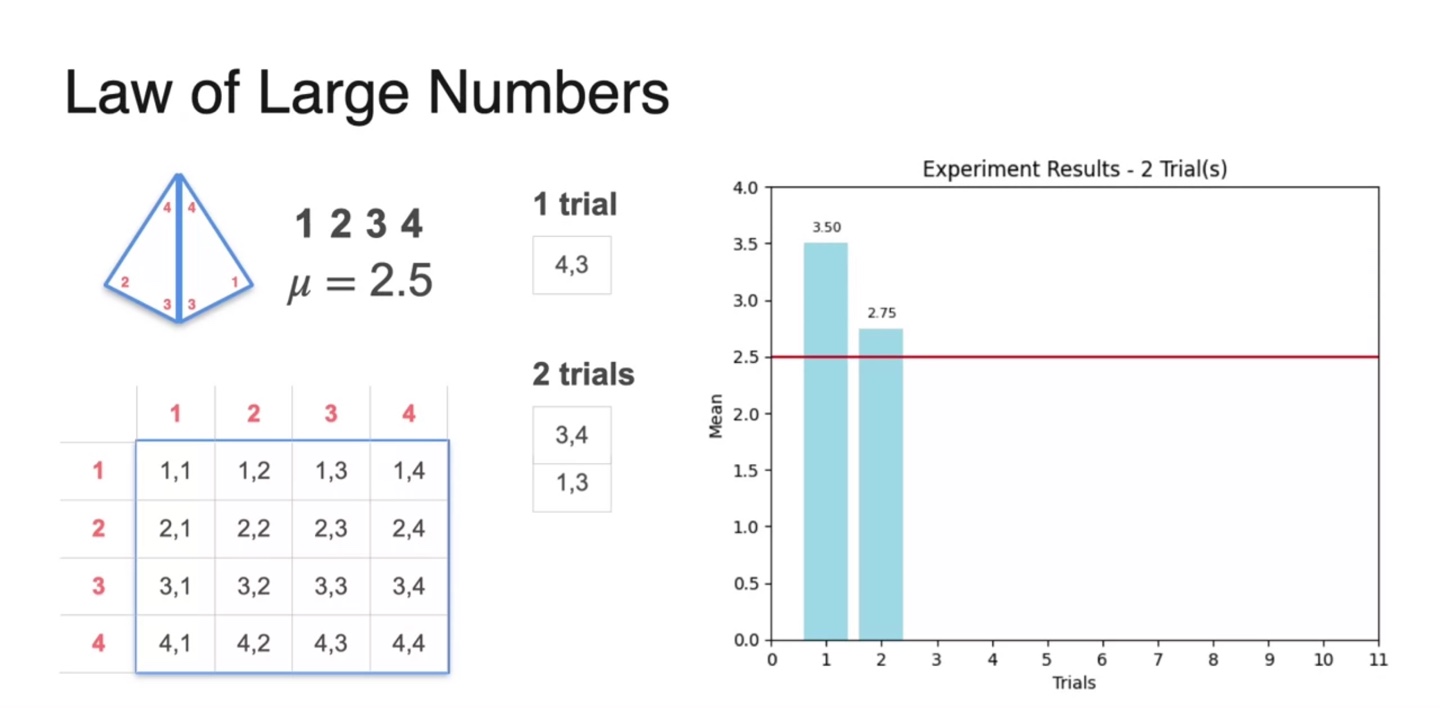
- 3번, 4번의 trial을 통해 얻어낸 평균치들을 계속해서 기록했다.
-
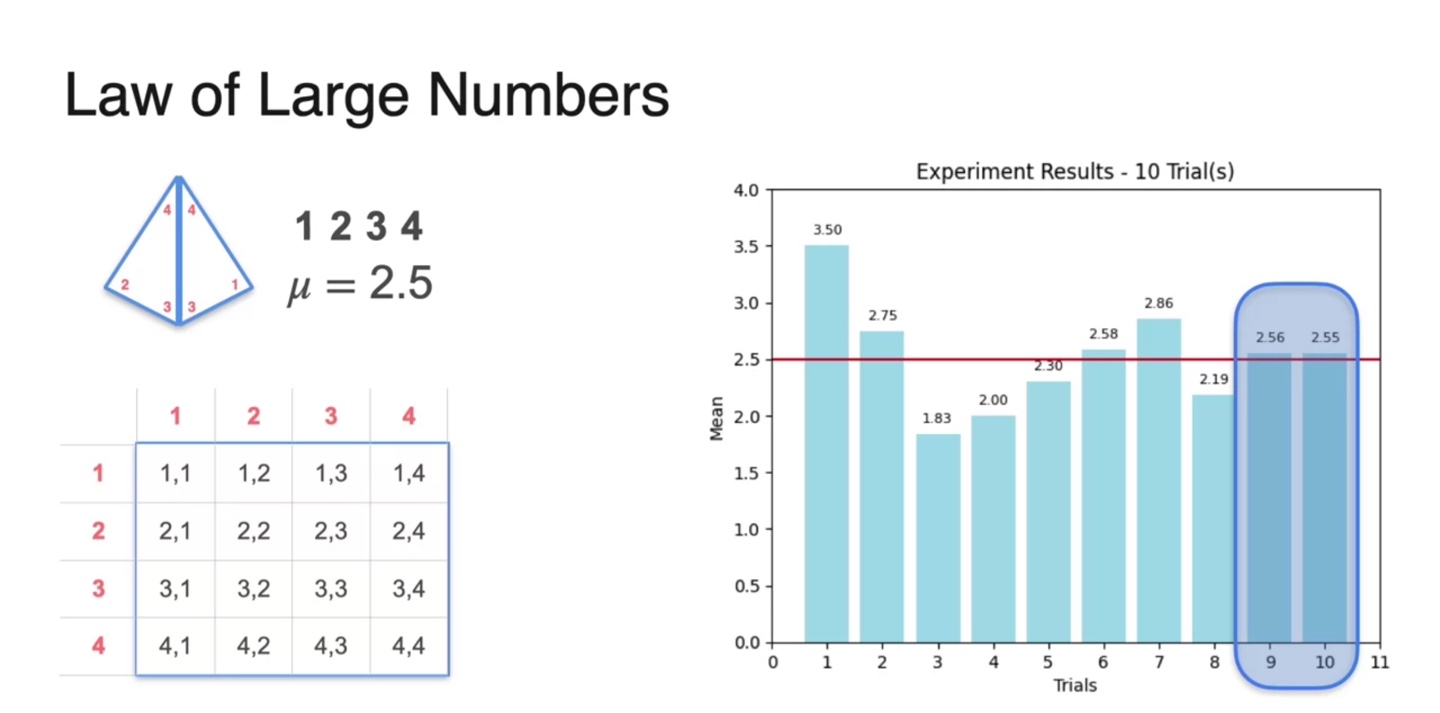
그러자 9번에서 10번의 trial로 얻은 평균치가 인 2.5에 다소 가깝게 얻어졌다.
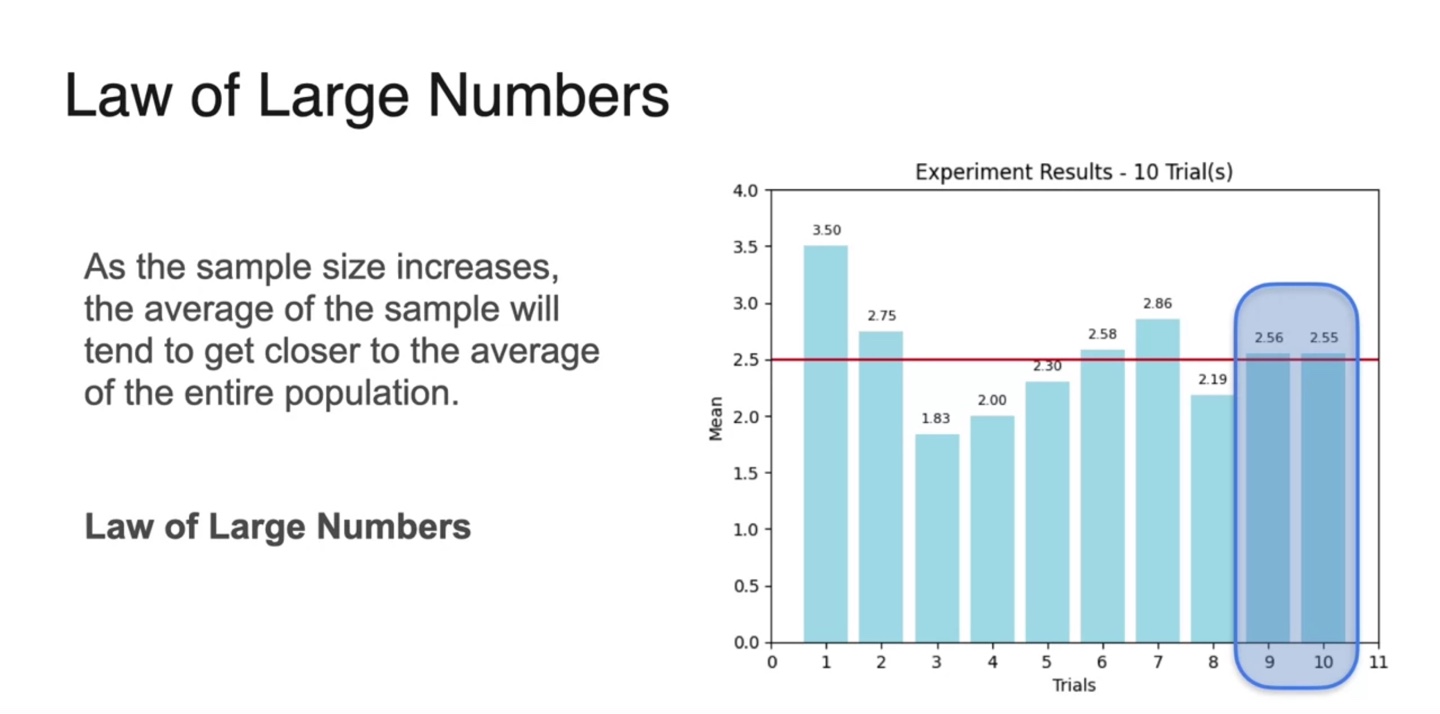
- 이를 통해 적당히 큰 으로 sample을 얻어내면 population mean에 근접할 수 있다는 점을 우리는 추측할 수 있다.
-
이러한 법칙을 Law of Large Numbers, "큰 수의 법칙"이라 한다.
-
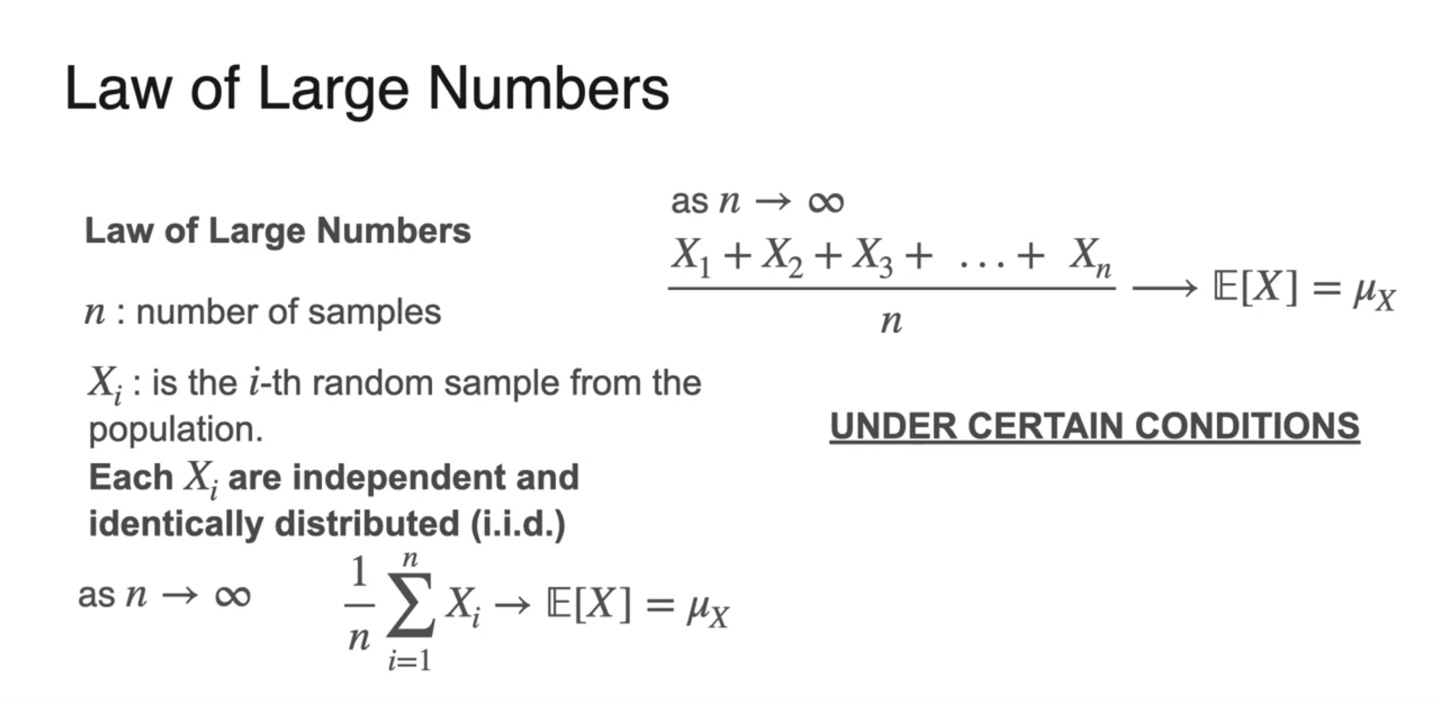
확률 변수 가 i.i.d를 따르고 무한대에 가깝도록 매우 큰 숫자라면 sample의 expected value가 전체 를 대신할 수 있을 정도가 된다.
- 즉, 매우 큰 수로 변수를 sampling하면 전체 모집단의 평균과 같은 값이 된다고 봐도 무방하다.
-
-
아래와 같은 조건일 때 말이다.
- Sample이 random하게 뽑혀야 한다.
- Sample size가 충분히 커야 한다.
- 관측의 결과가 independent해야 한다.
Central Limit Theorem - Discrete Random Variable
-
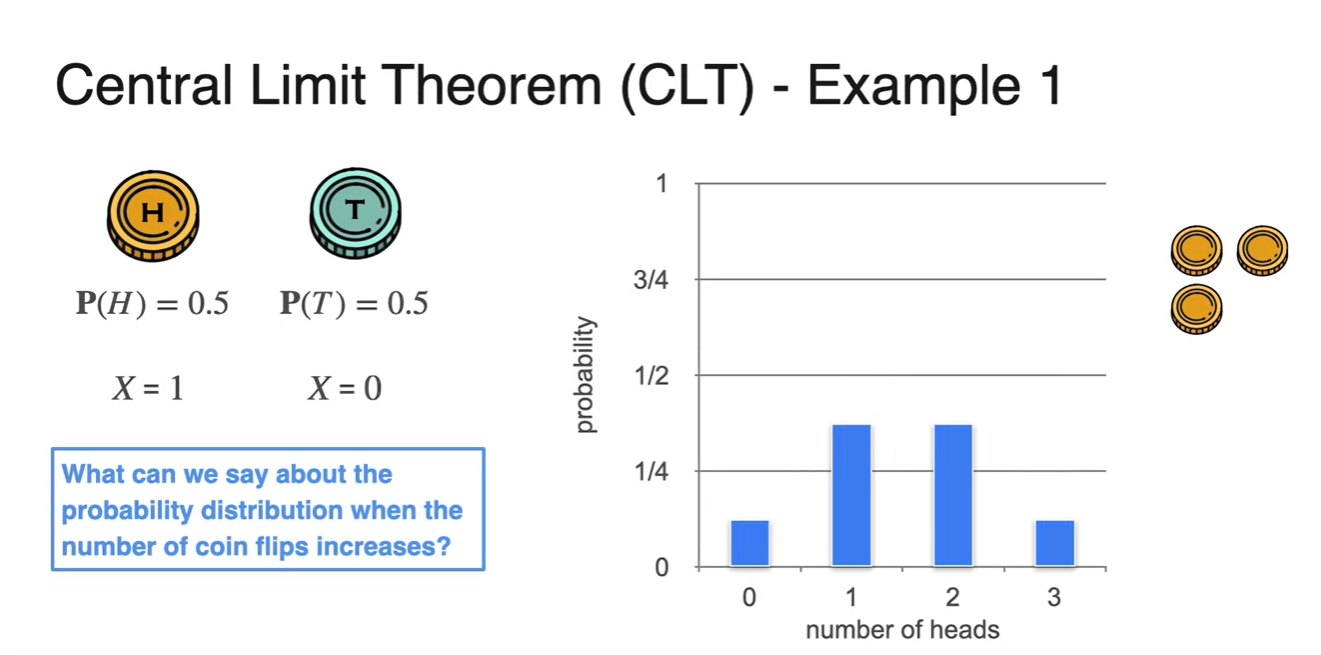
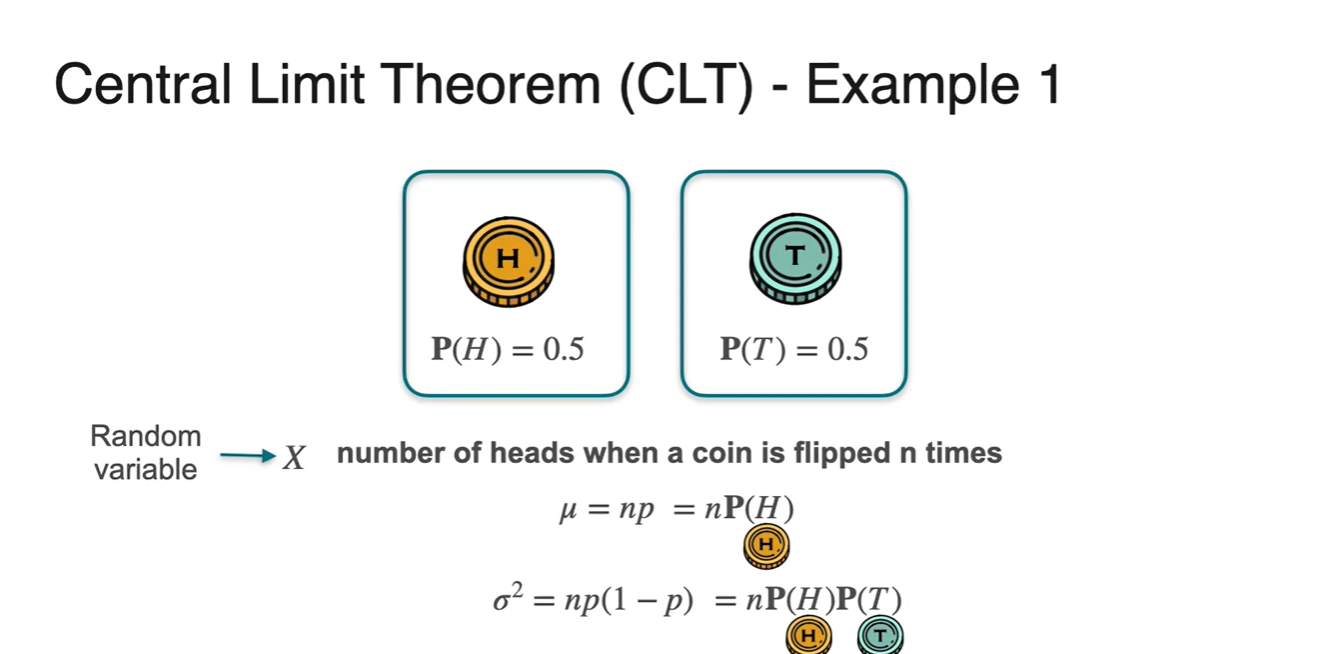
아래와 같은 동전 던지기 예시를 들어 중심 극한 정리, CLT에 대해 알아보자.
- 만약 시행 횟수가 1번이라면 Head의 확률 변수를 1, Tail의 확률 변수를 0로 discrete하게 나타낼 수 있다.
-
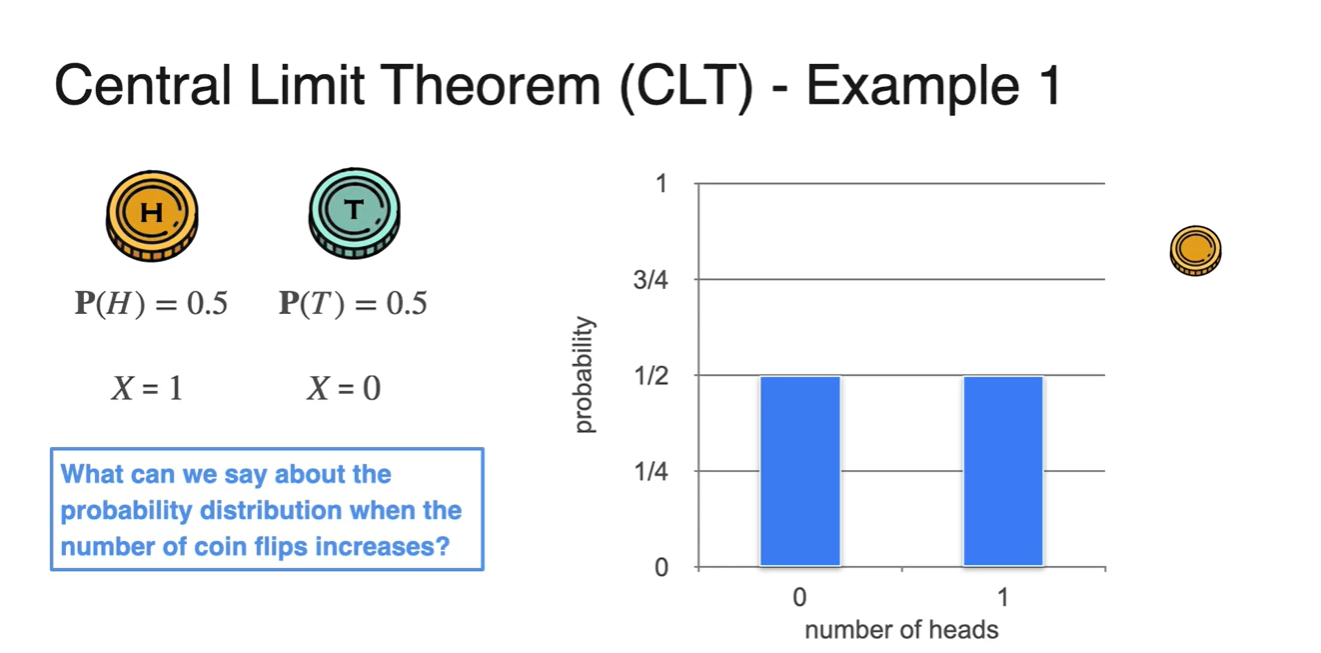
한 번의 시행으로 얻을 수 있는 확률은 아래와 같이 둘 다 1/2이다.
-
이를 Bernoulli(베르누이) distribution으로 나타내면 다음과 같은 그래프를 얻게 된다.
- 만일 여러 번의 시행을 반복하면 어떤 분포를 갖게 될까?
-
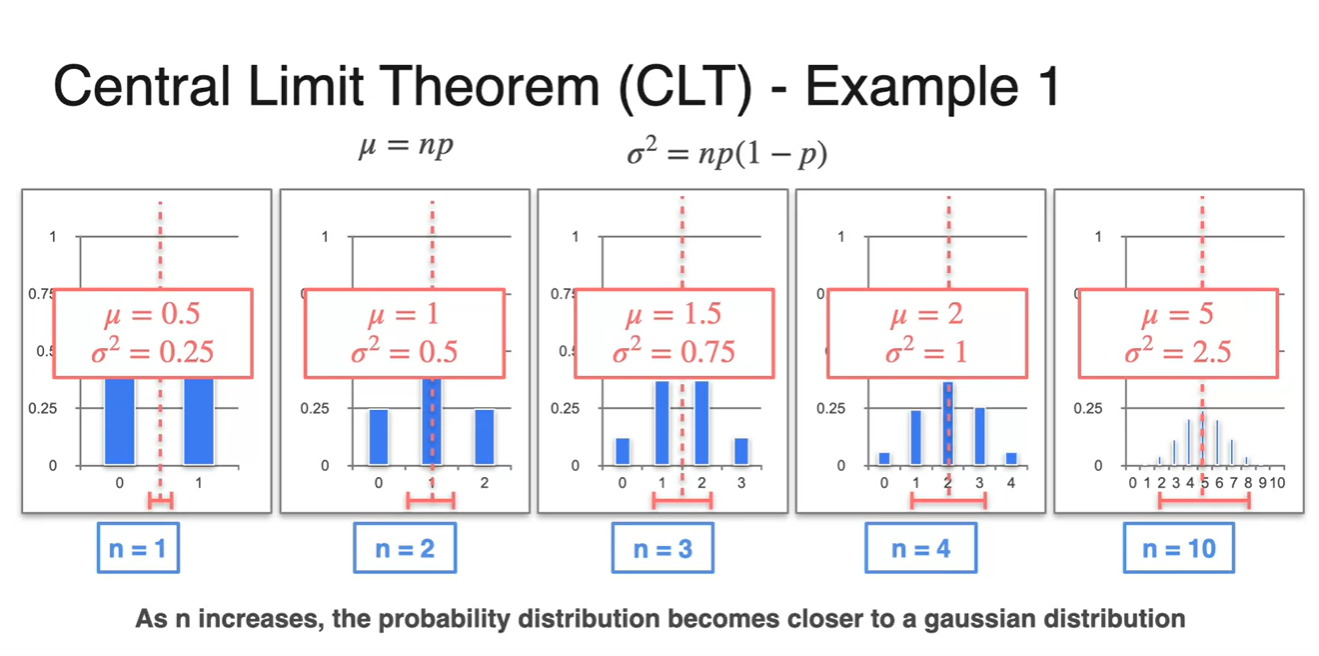
- 아래 펼쳐질 그래프들은 Bernoulli 분포를 갖는 동일한 동전을 2개, 3개, 10개 반복하여 얻어낸 ditribution이다.
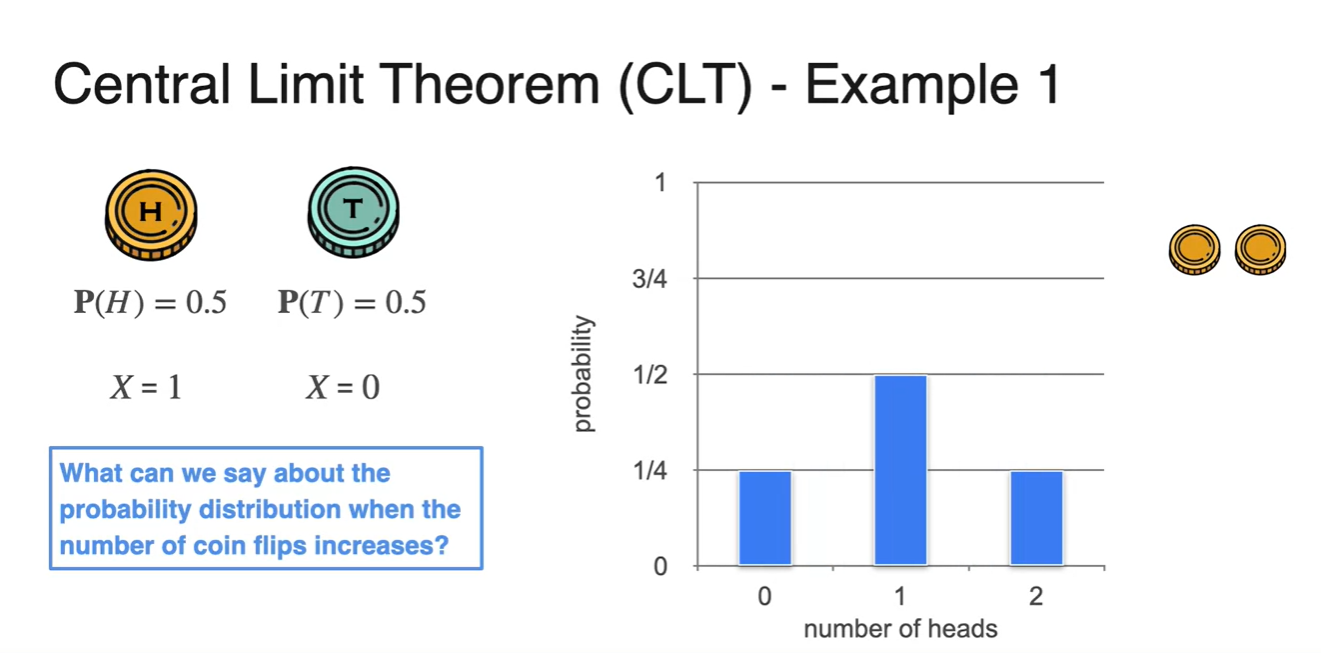
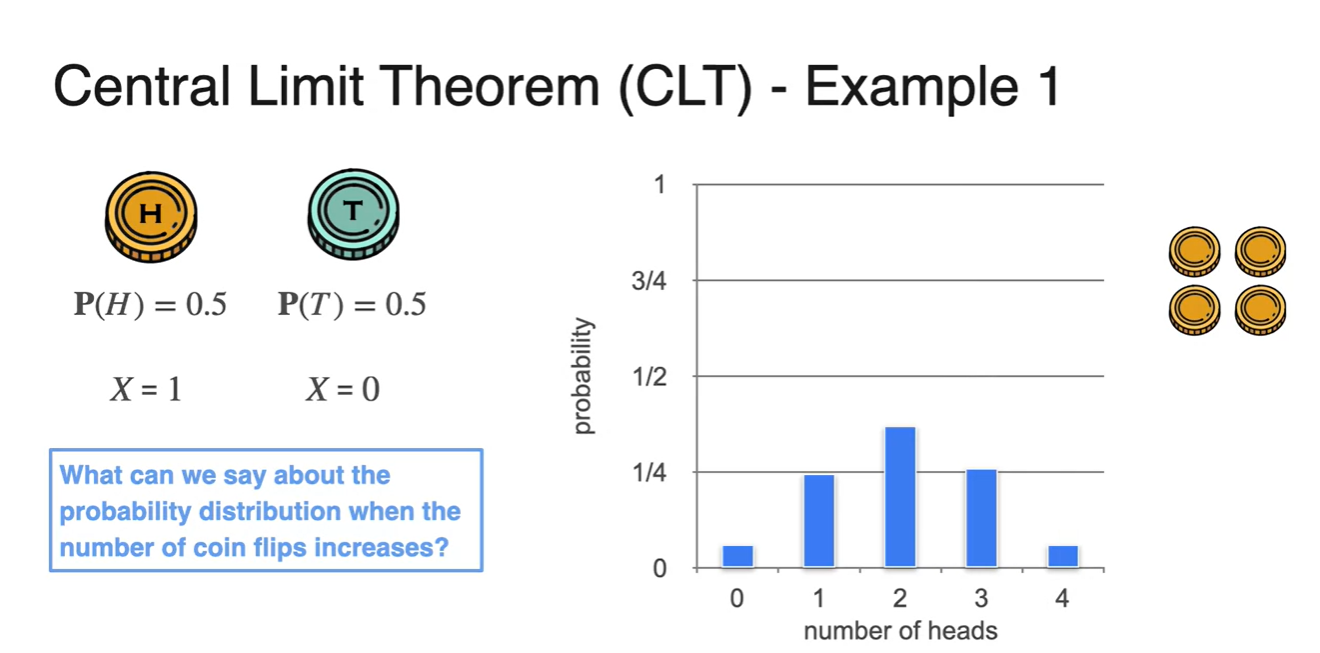
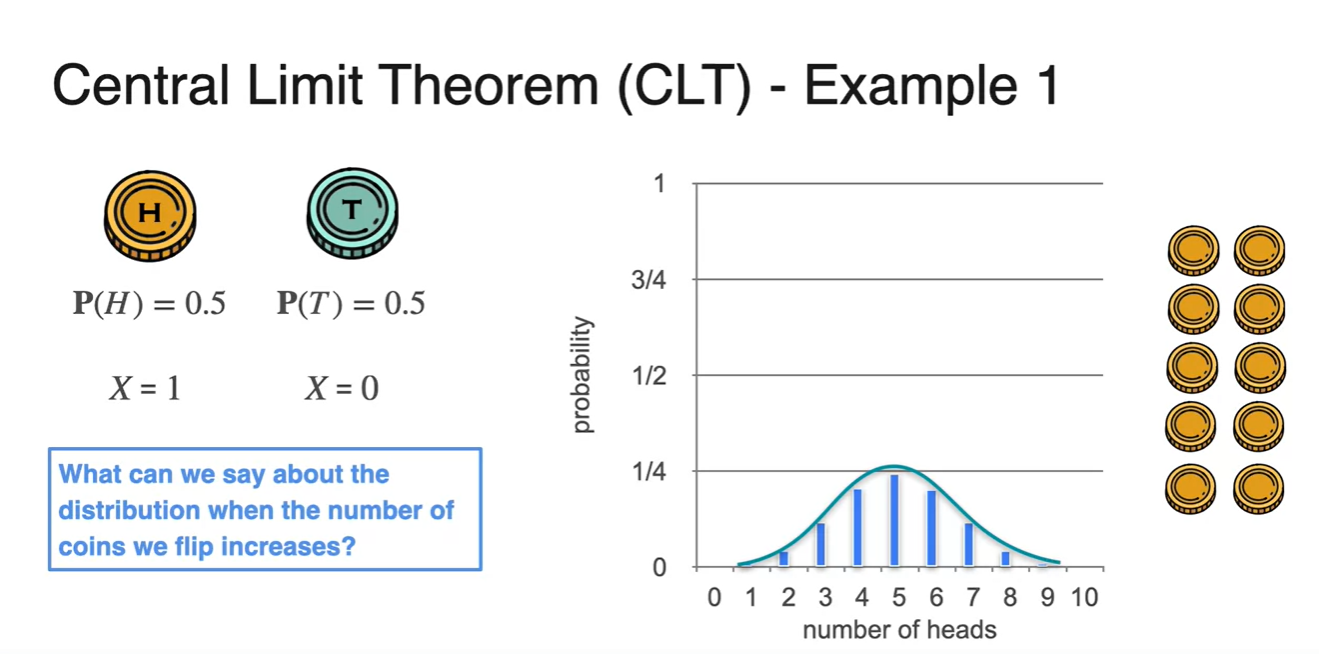
- 실험 결과 분포의 모양이 점점 bell shape 즉, 종 모양을 갖는 Normal ditribution과 비슷해진다는 것을 알 수 있었다.
-
Binomial distribution(Bernoulli distribution을 따르는 사건을 n번 시행)의 평균과 분산을 구하는 공식은 아래와 같다.
- Mean :
- Variance :
-
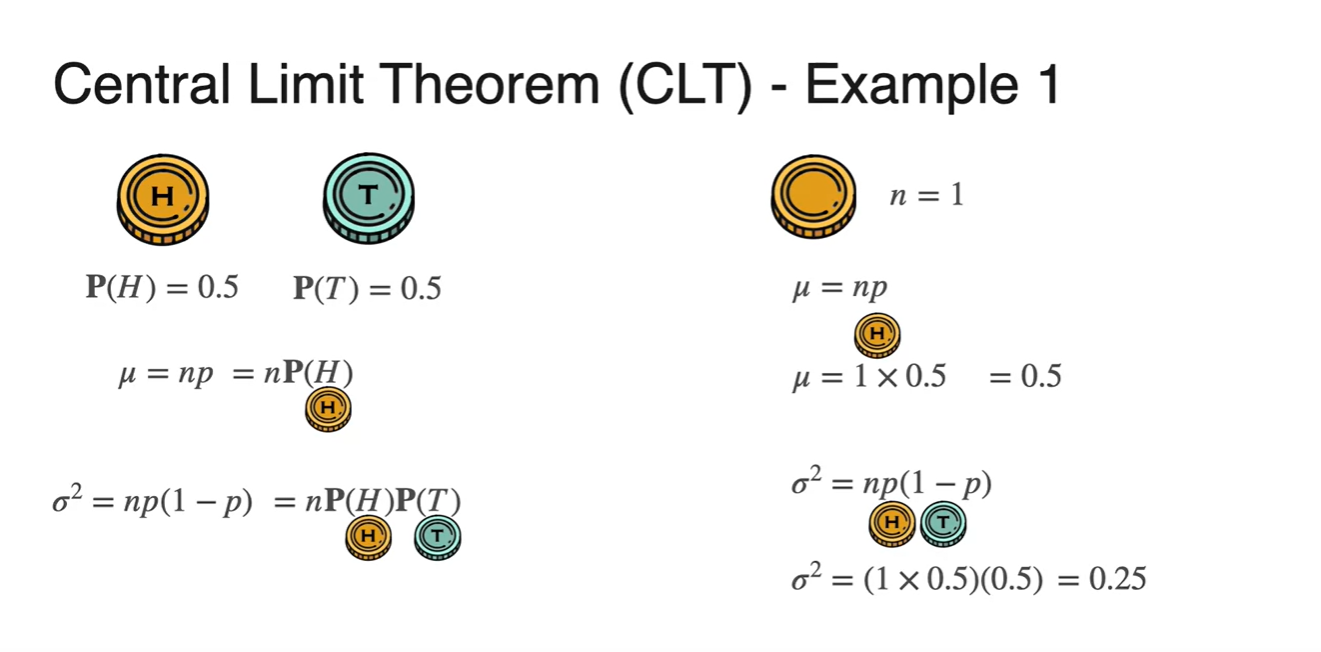
만약 시행 횟수 이라면 평균 와 분산 는 아래와 같이 계산된다.
- Mean :
- Variance :
-
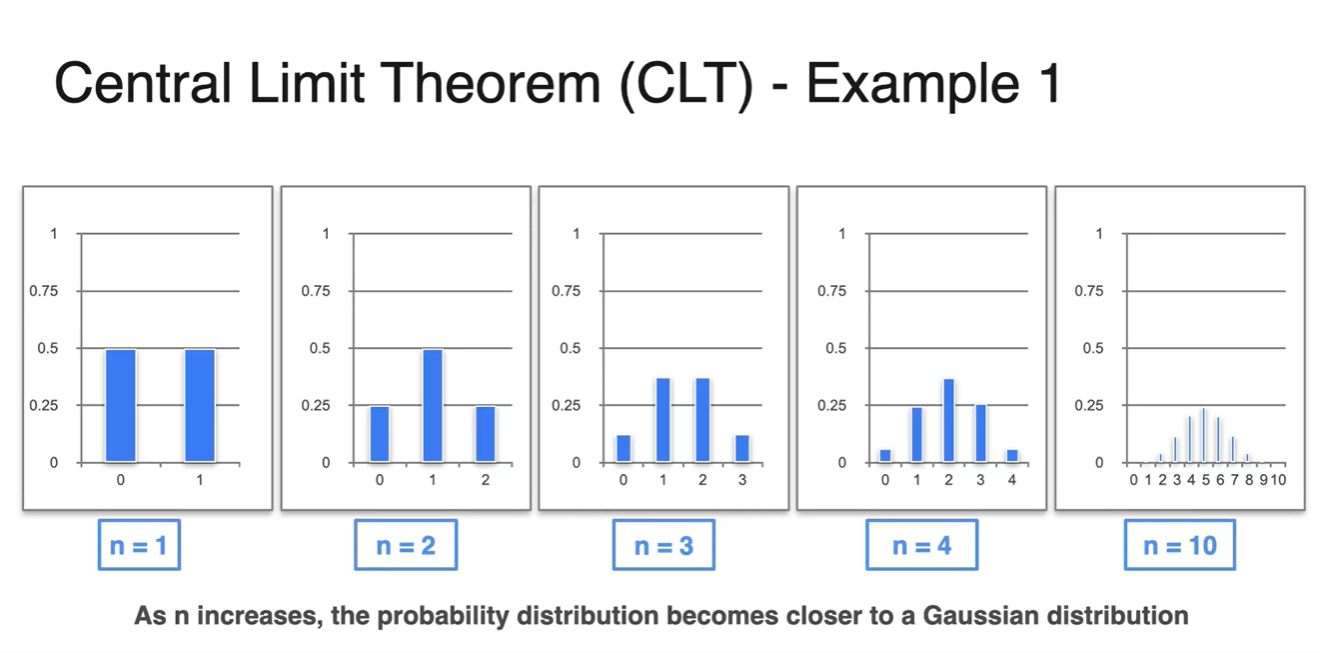
여러 번 시행한 결과에 따라 평균과 분산을 구해보면 다음과 같은 결과를 얻을 수 있다.
- 공통점은 평균이 Random variables의 중간 지점을 따른다는 점과 분산이 중심으로부터 symmetric하다는 점이다.
-
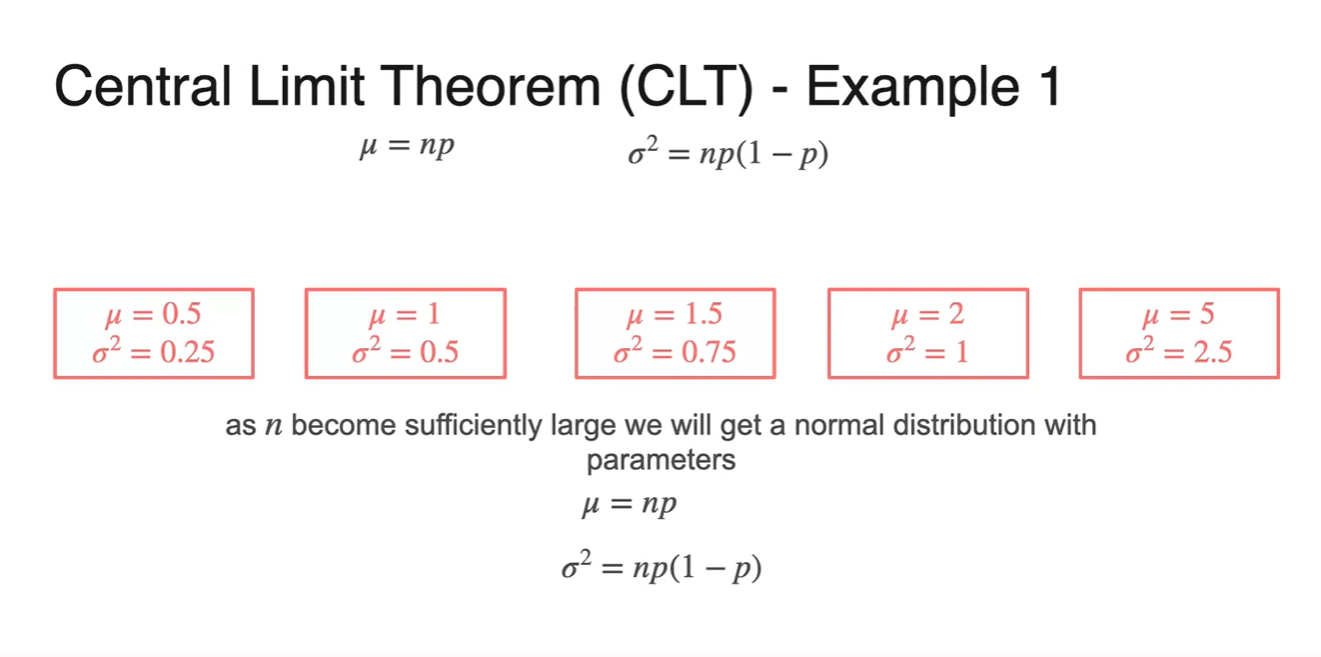
따라서 시행 횟수 (samples 개수)이 늘어날수록 Normal distribution에 가까워진다.
- 이러한 정리가 바로 Central Limit Theorem, CLT이다.
Central Limit Theorem - Continuous Random Variable
-
이번에는 변수가 Continuous한 경우에서의 CLT를 정의해보자.
-
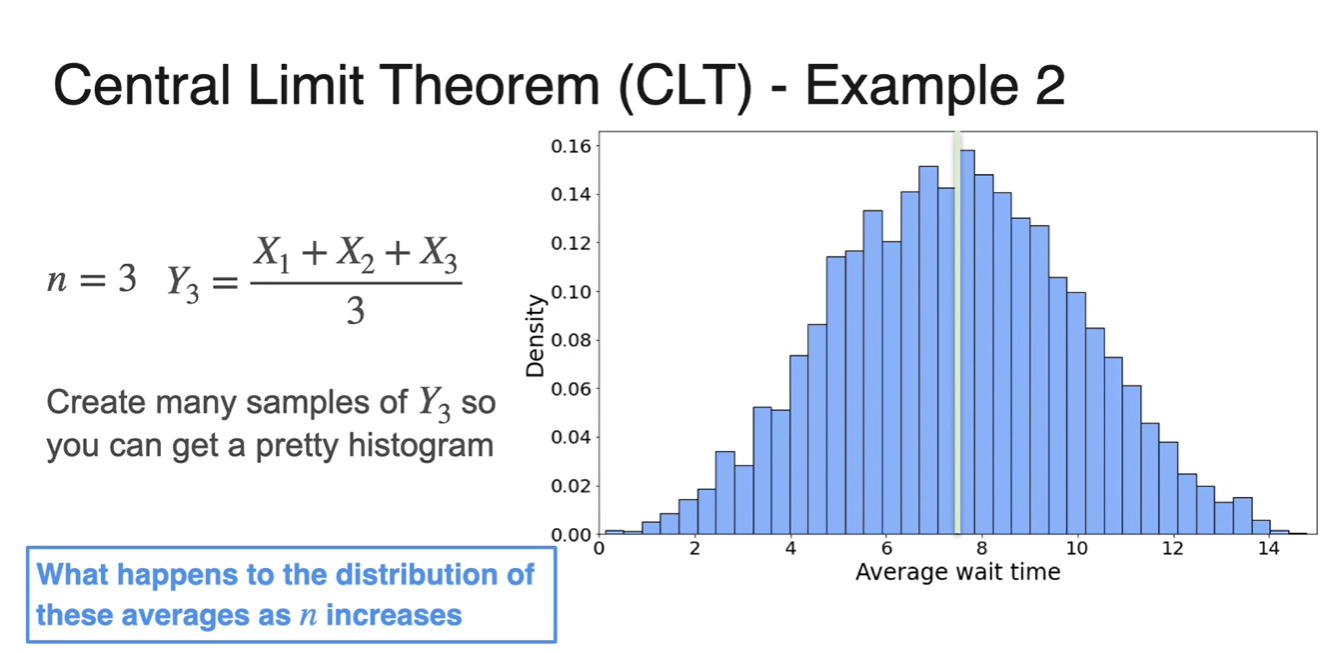
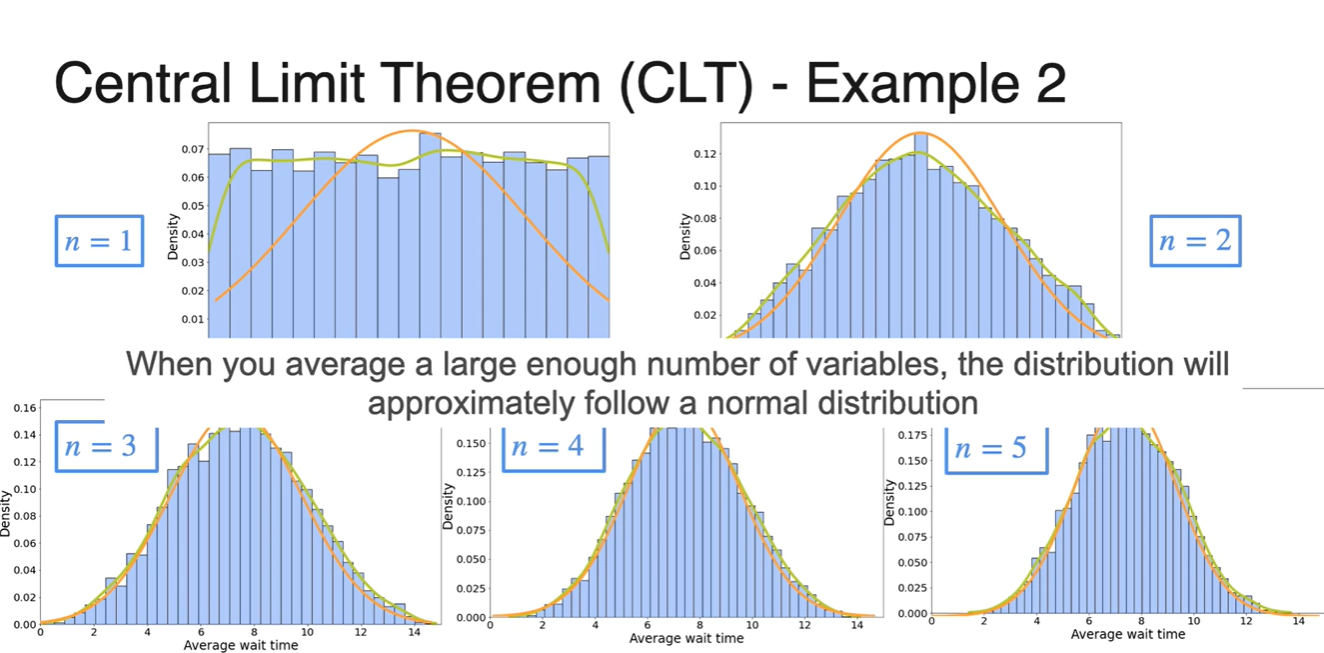
상담을 받기 위해 기다린 시간을 확률 변수 로 설정하고, 0부터 15까지의 값으로 쪼개어 각 범위에 놓인 확률을 uniform distribution으로 가정한다.
-
-
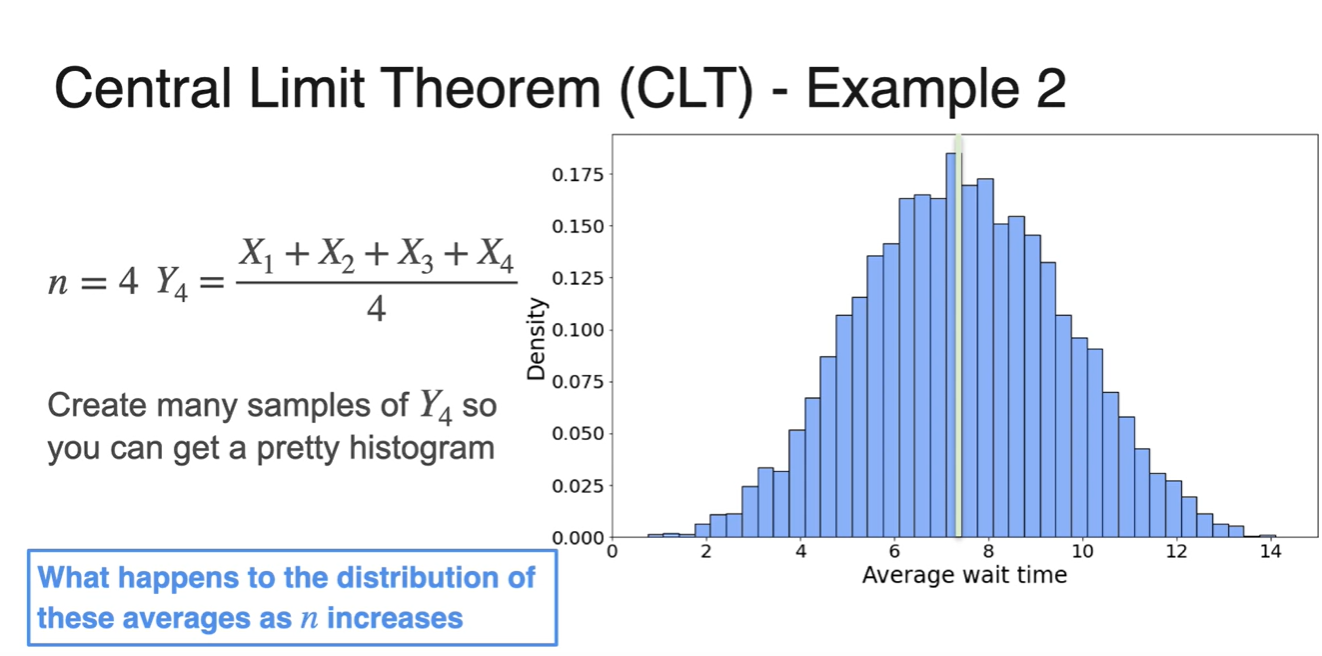
번의 실험으로 얻은 확률 변수 들의 평균을 새로운 변수 으로 표기해보자.
- 기존 확률 변수 의 samples 평균인 새로운 변수 의 distribution은 어떻게 생겼을까?
-
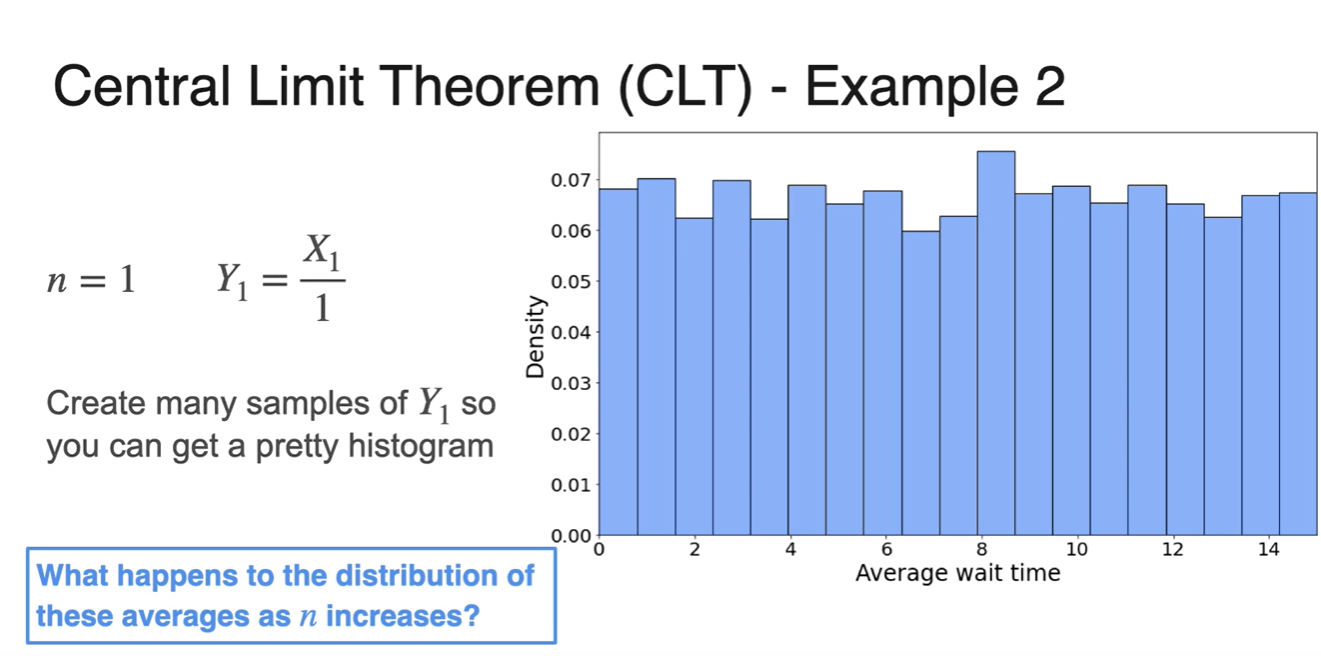
이라면 확률 변수 하나만 뽑아서 나타내었을 때의 분포를 말한다.
-
시행 횟수가 1이므로 변수의 합( only)에 나눠지는 값이 1이다.
- 이는 기존 분포인 uniform ditribution과 거의 동일함을 알 수 있다.
-
-
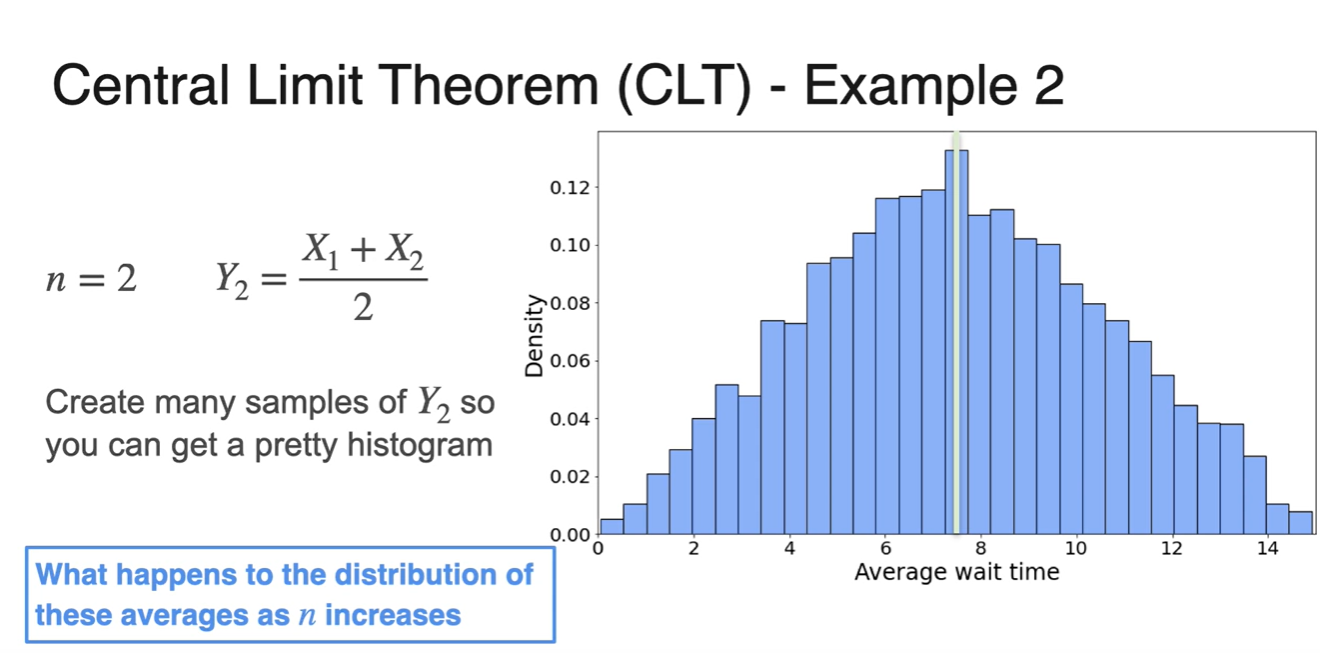
라면 확률 변수 두 개를 뽑아 평균내었을 때의 분포를 말한다.
-
시행 횟수가 2이므로 과 변수의 합에 나눠지는 값이 2이다.
- 기존 분포보다 종모양에 가깝고 평균이 중앙값에 위치한다는 점을 알 수 있다.
-
-
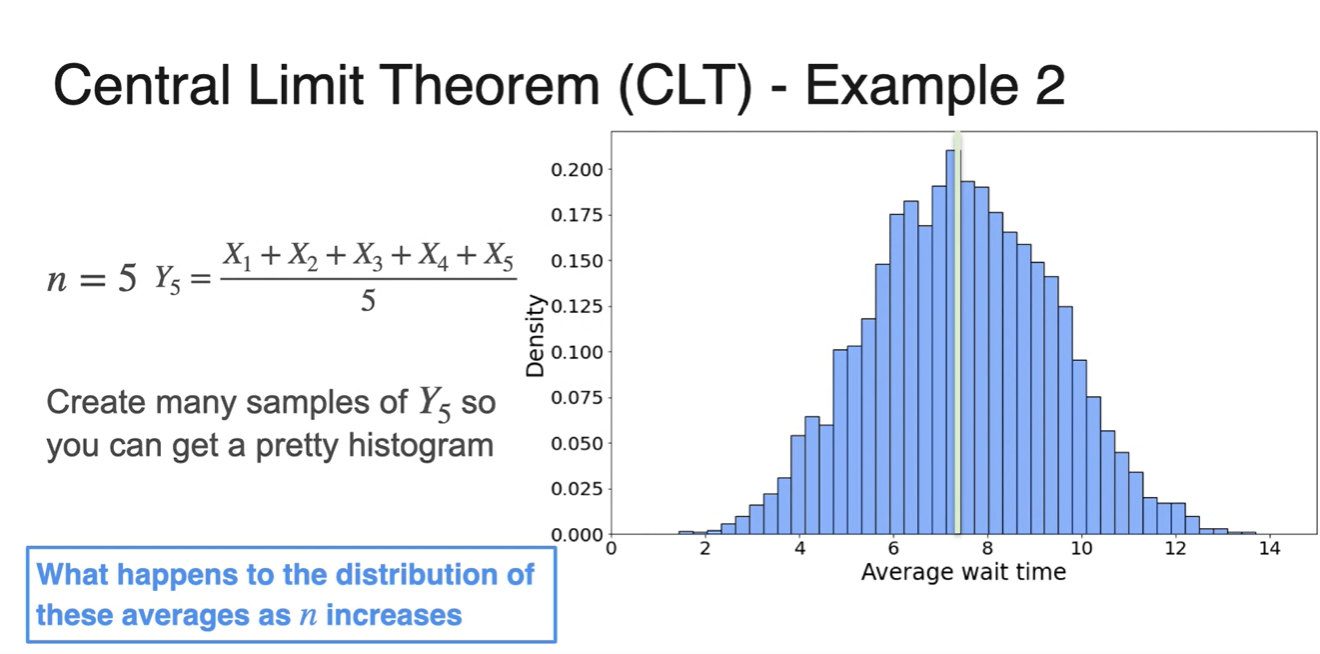
일 때와 , 일 때 모두 종 모양에 가까운 그래프 분포가 그려진다.
- 그리고 이 클수록 중심에 가까운 narrow 그래프 모양을 띄게 된다.
-
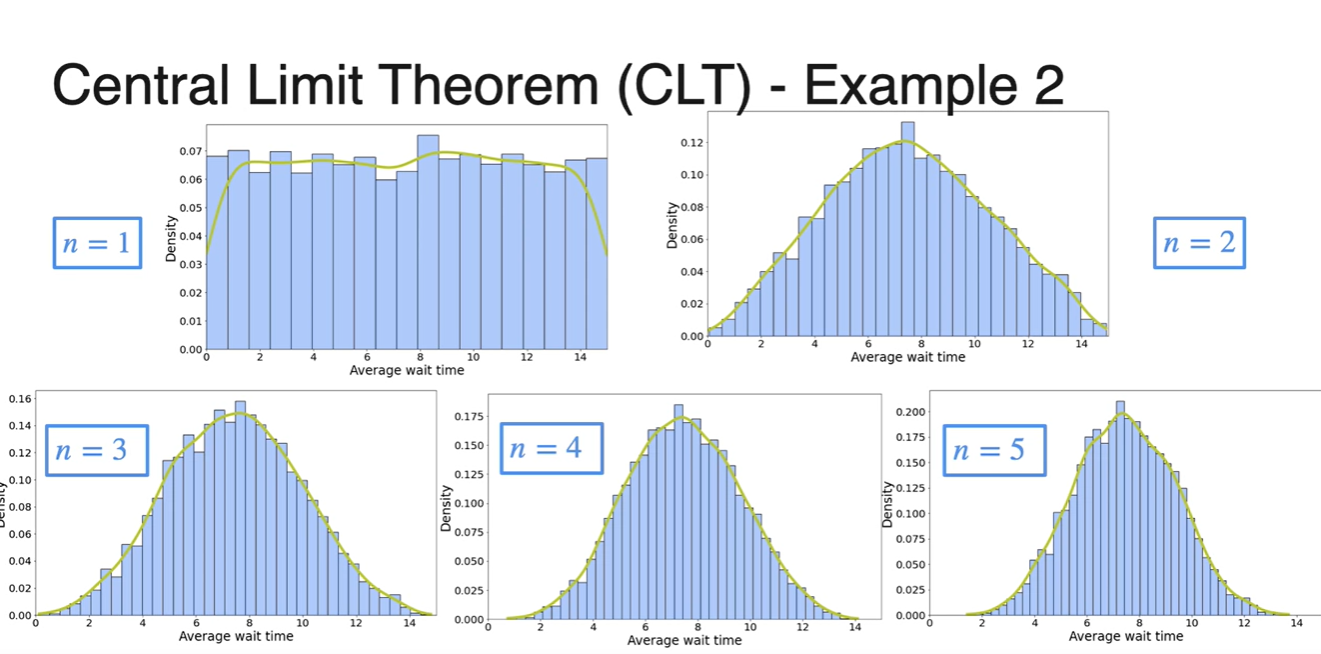
위 그래프들을 한 곳에 모아 보자.
- 초록색 선그래프는 Kernel Density Estimation(KDE)에 의해 그려진 추정 그래프다.
-
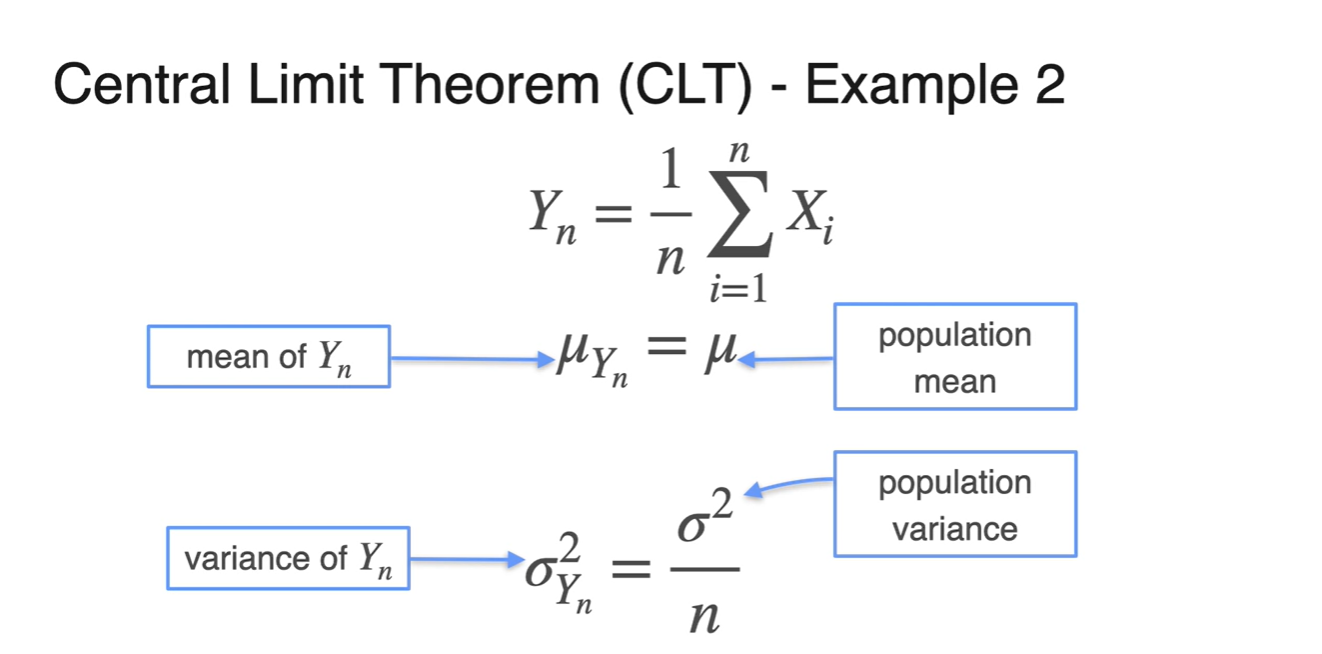
은 i.i.d한 확률 변수 의 sample을 모아 평균낸 분포의 확률 변수다.
-
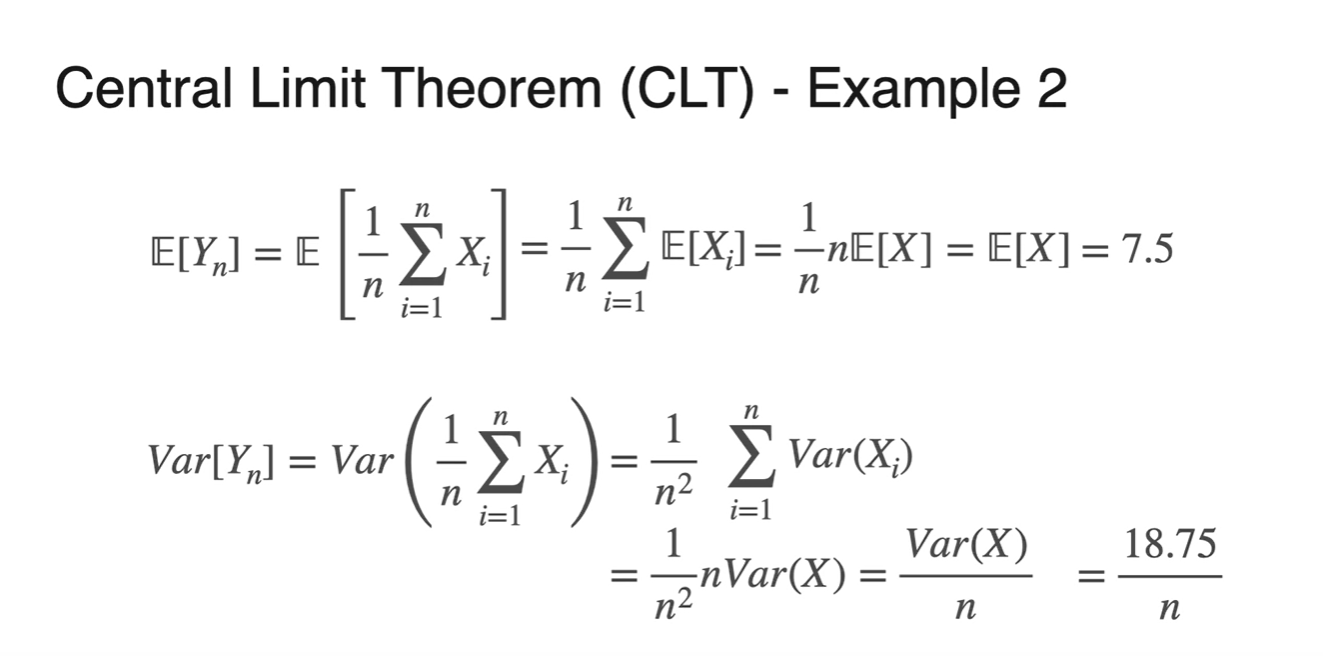
기댓값과 분산을 수식적으로 정리하면 아래와 같은 결과를 얻을 수 있다.
-
-
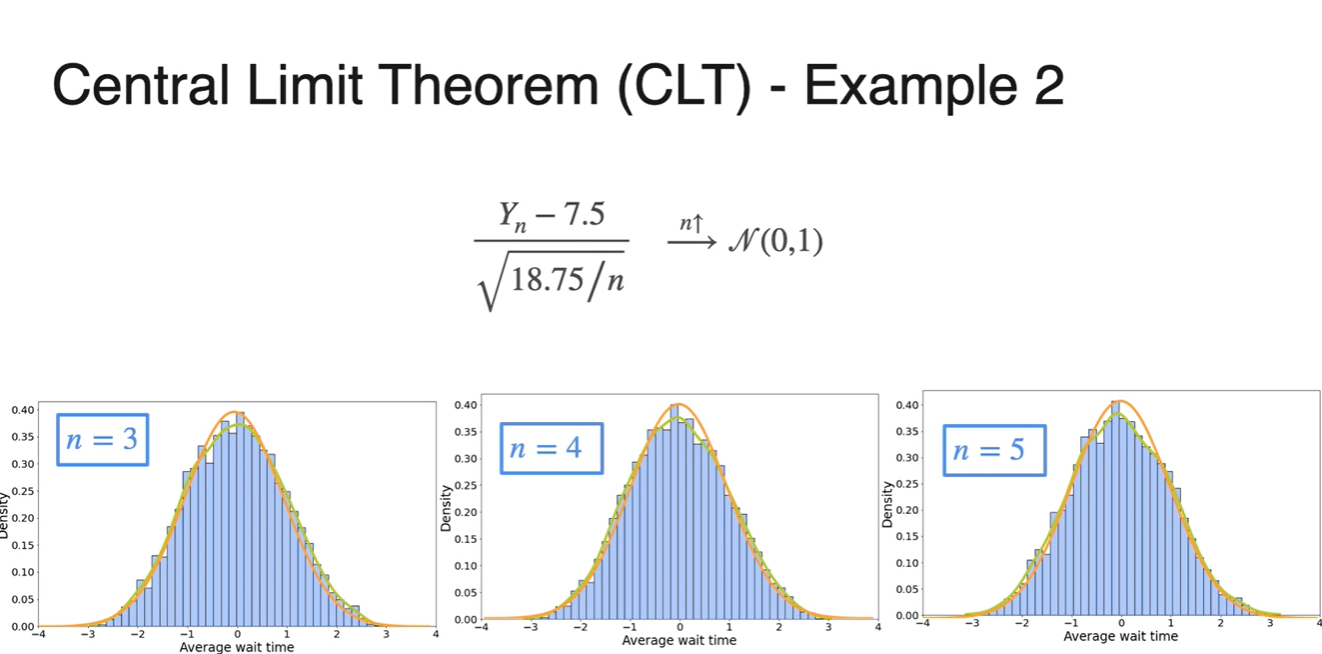
아래 주황색 그래프는 normal distribution의 그래프를 나타낸 것이다.
- Large enough한 변수들의 평균값은 normal distribution이라 가정할 수 있을 정도로 분포가 거의 비슷하다는 점을 알 수 있다.
-
공식적으로 변수는 이 매우 클수록 Normal distribution 을 따른다.
- cf. 임의의 확률 변수 에 대하여 라면, 을 따랐었다.
-
해당 분포를 population 평균 및 분산과 비교하면 다음과 같은 차이를 보인다.
- Mean :
- Variance :
-
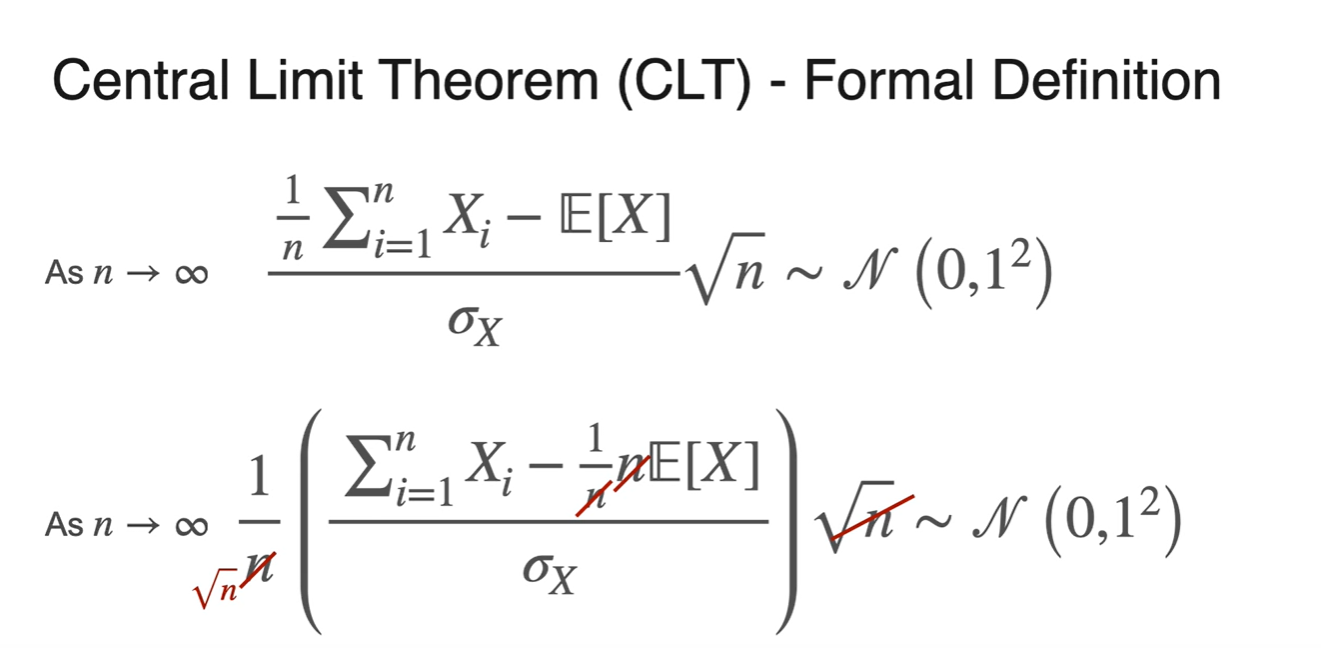
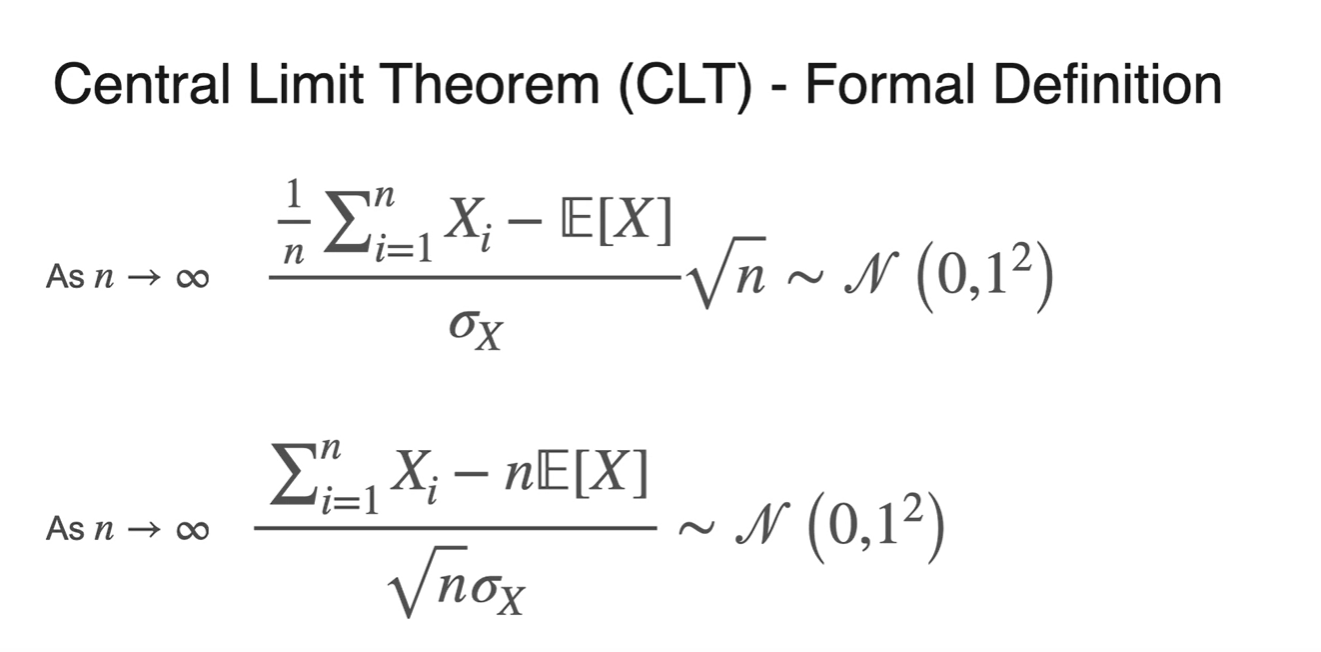
로 갈 때, 확률 변수 의 값이 아래와 같은 수식으로 정리될 때, 정규 분포를 따르게 된다.
-
이면, 은 을 따른다.
-
로도 나타낼 수 있다.
-
-
-
으로 묶어 정리하면 아래와 같이 정리된다.
Lesson 2 - Point Estimation
Maximum Likelihood Estimation: Motivation
-
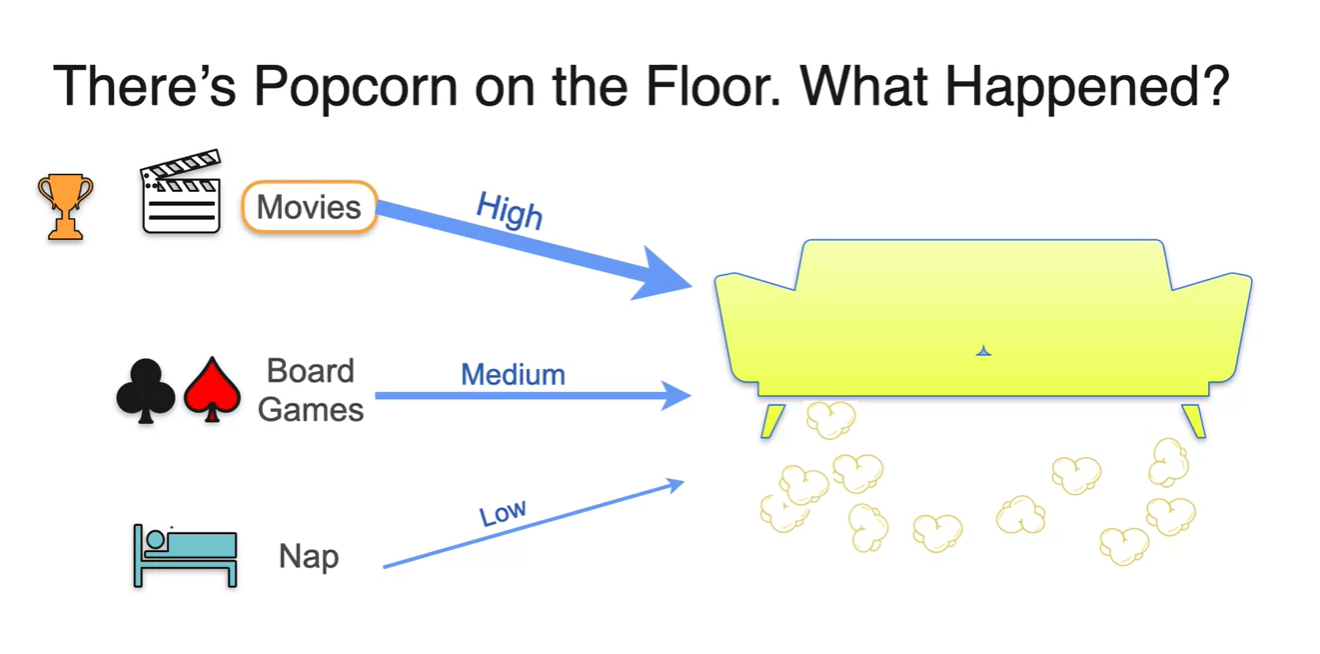
만일 아래와 같은 소파 아래, Popcorn이 잔뜩 떨어져 있었다고 가정하자.
- 여기에 있었던 사람들이 했었을 행동에 대한 선택지가 Movies, Board Games, Nap 이렇게 3가지가 있다면 무엇을 했을 확률이 높은가?
-
아마도 Most likely that happened의 정답은 Movies일 것이다.
- Movies의 확률이 제일 높고, Board Games가 중간, Nap은 거의 관련 없는 선택지일 거라는 것이다.
-
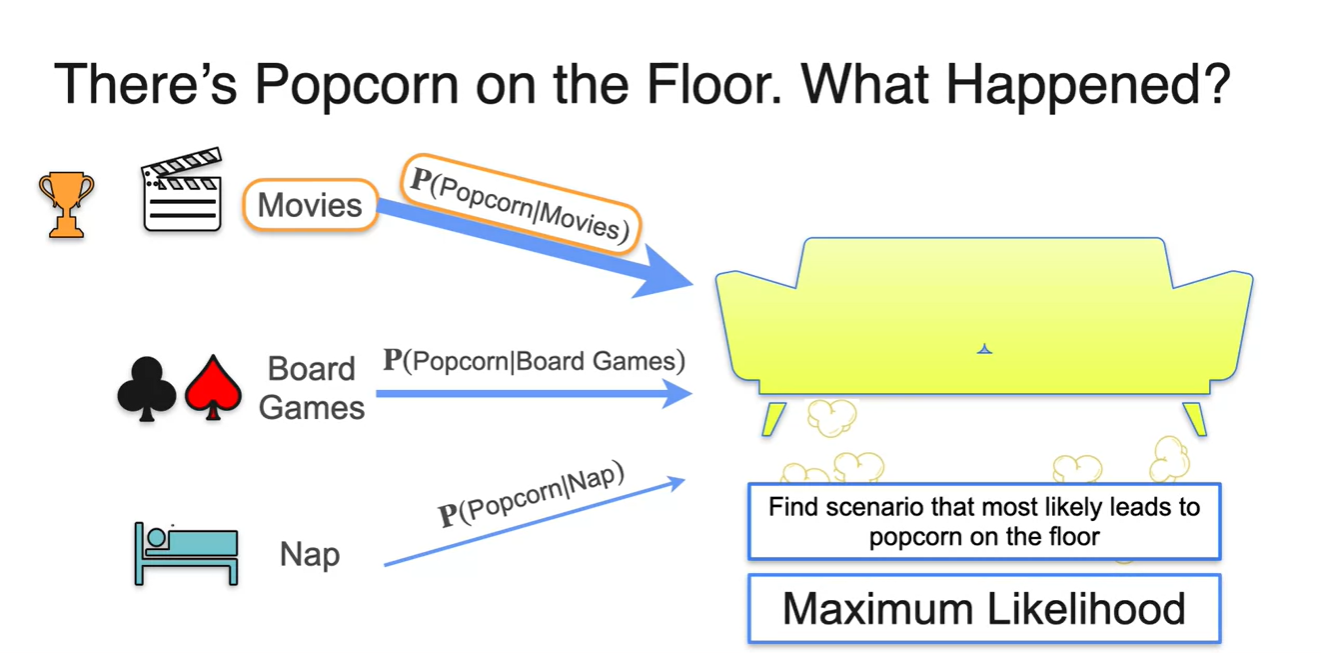
이를 Conditional probability로 표현하면 라고 표현할 수 있다.
- 즉, 주어진 시나리오가 존재할 때 해당 시나리오 대로 흘러갈 수 있도록 하는 요인을 "Maximum Likelihood"라고 이야기 하는 것이다!
-
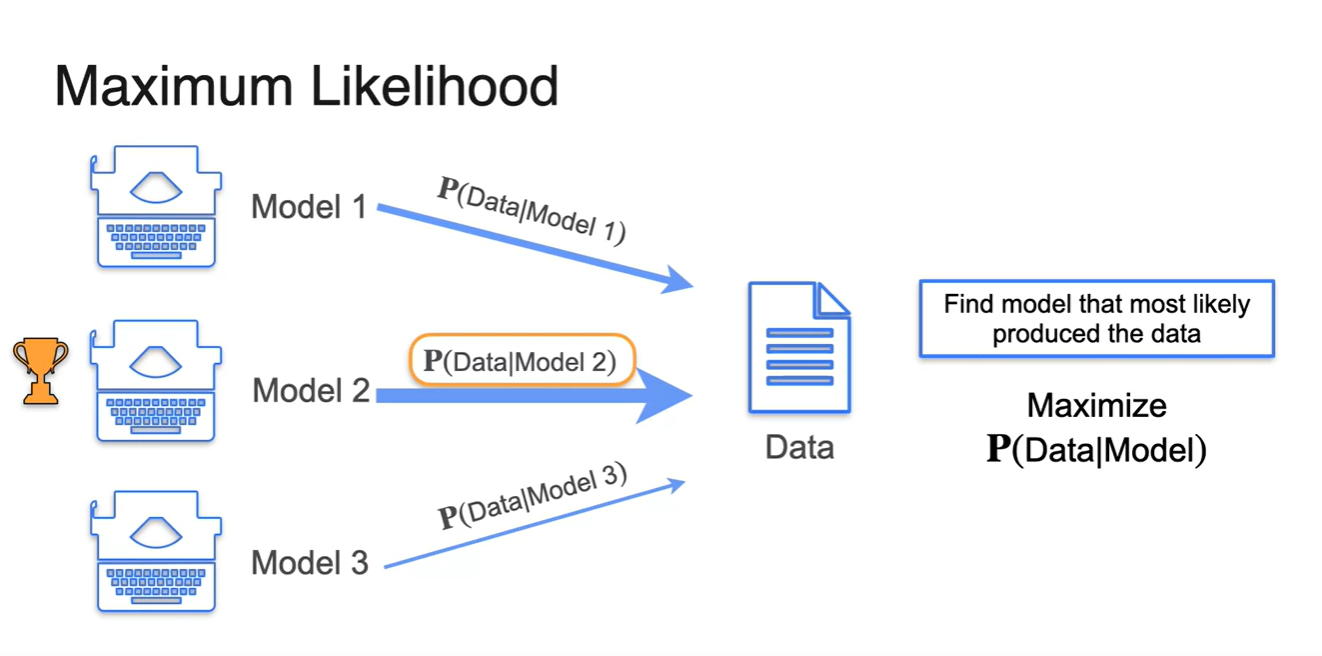
머신러닝에서는 Model이 likelihood의 역할을 한다.
-
어떠한 Data의 시나리오대로 흘러갈 수 있도록 하는 만들기 때문이다.
- 따라서 우리는 결과인 Data가 주어졌을 때, Model이 이를 내뱉을 확률 을 Maximize하면 된다.
-
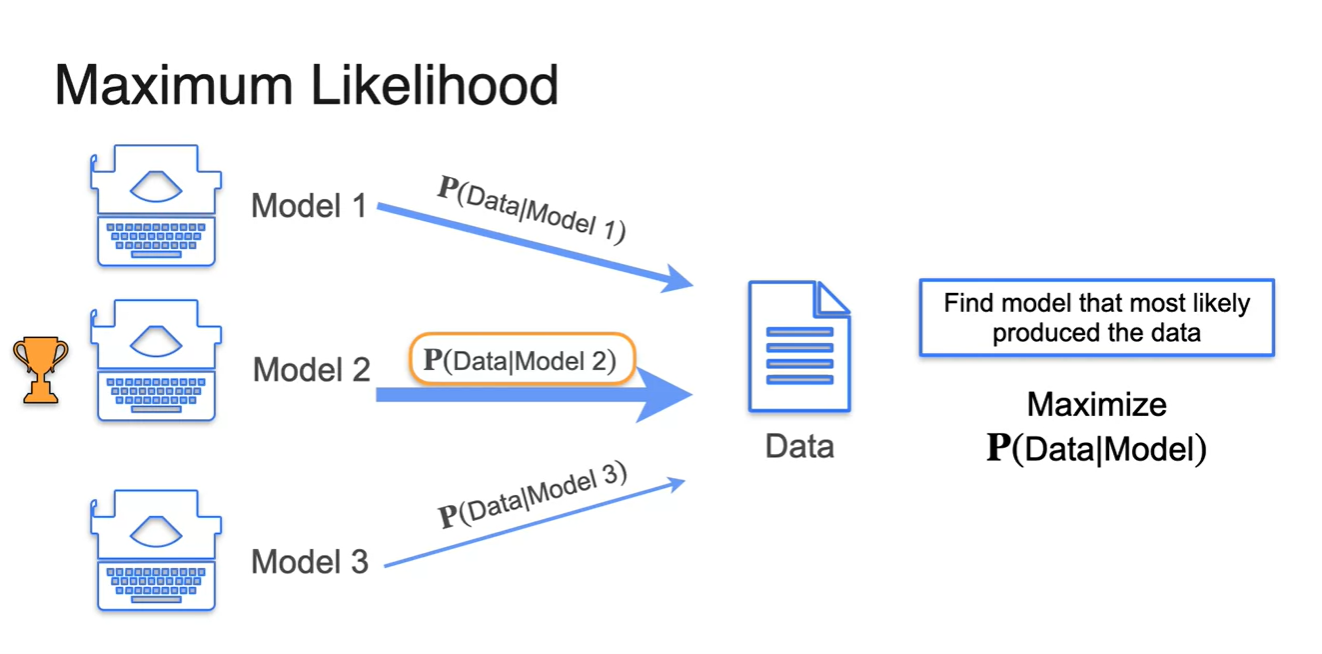
- Data를 활용하여 의 확률이 가장 높은 Model을 선택하는 것이 바로 머신러닝의 핵심 원리다.

MLE: Bernoulli Example
-
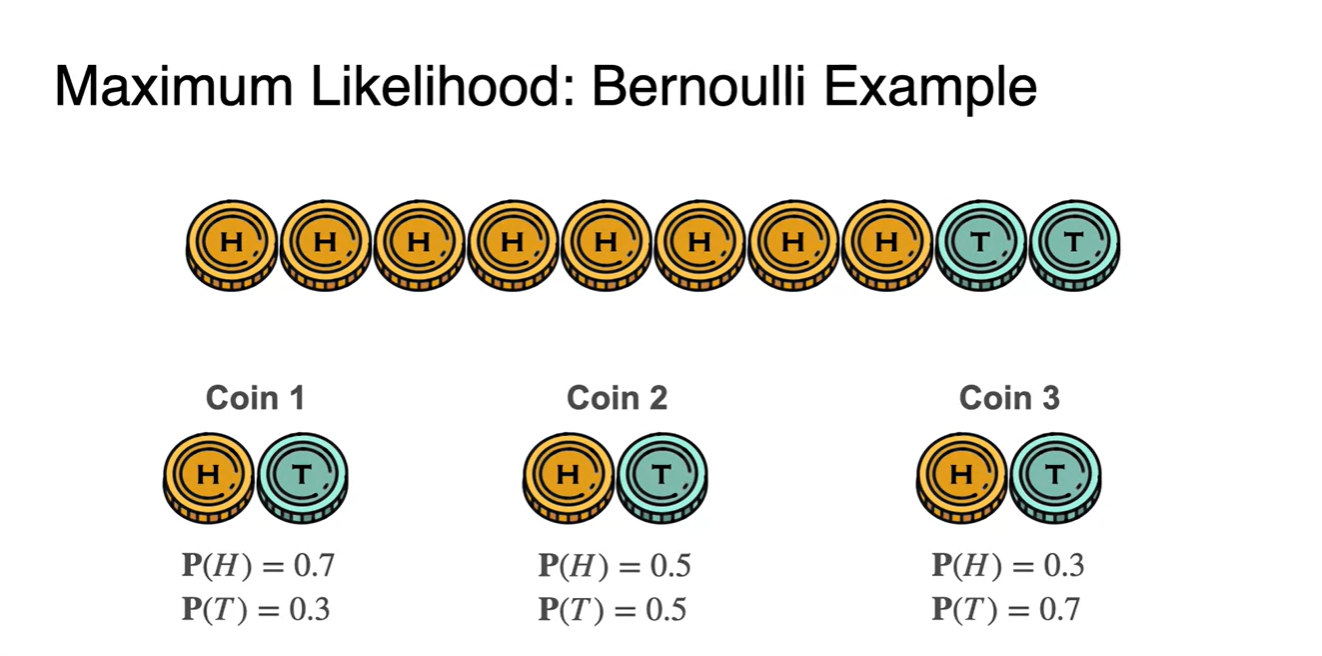
동전 던지기와 같은 Bernoulli distribution에서의 예시를 살펴보자.
-
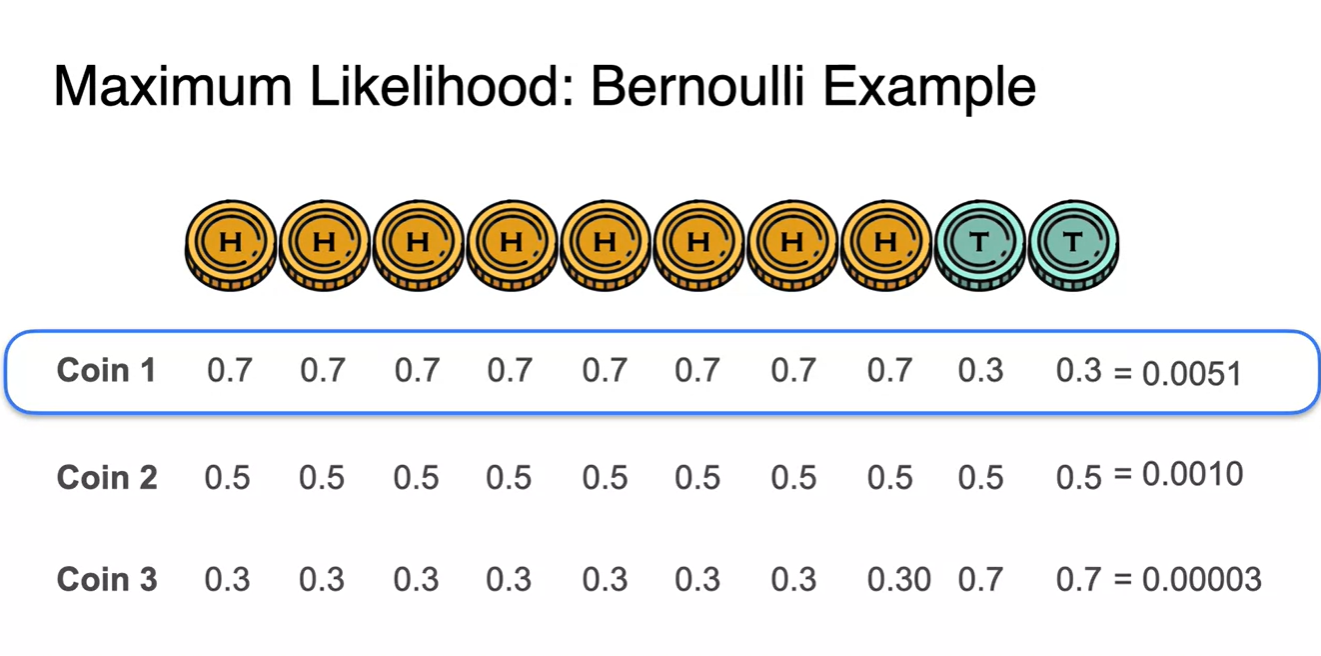
아래와 같이 Head가 8번, Tail이 2번 나온 sequence 결과가 나왔다.
- 다음 3가지 선택지 중 해당 결과를 가장 잘 만족하는 distribution은 무엇일까?
-
-
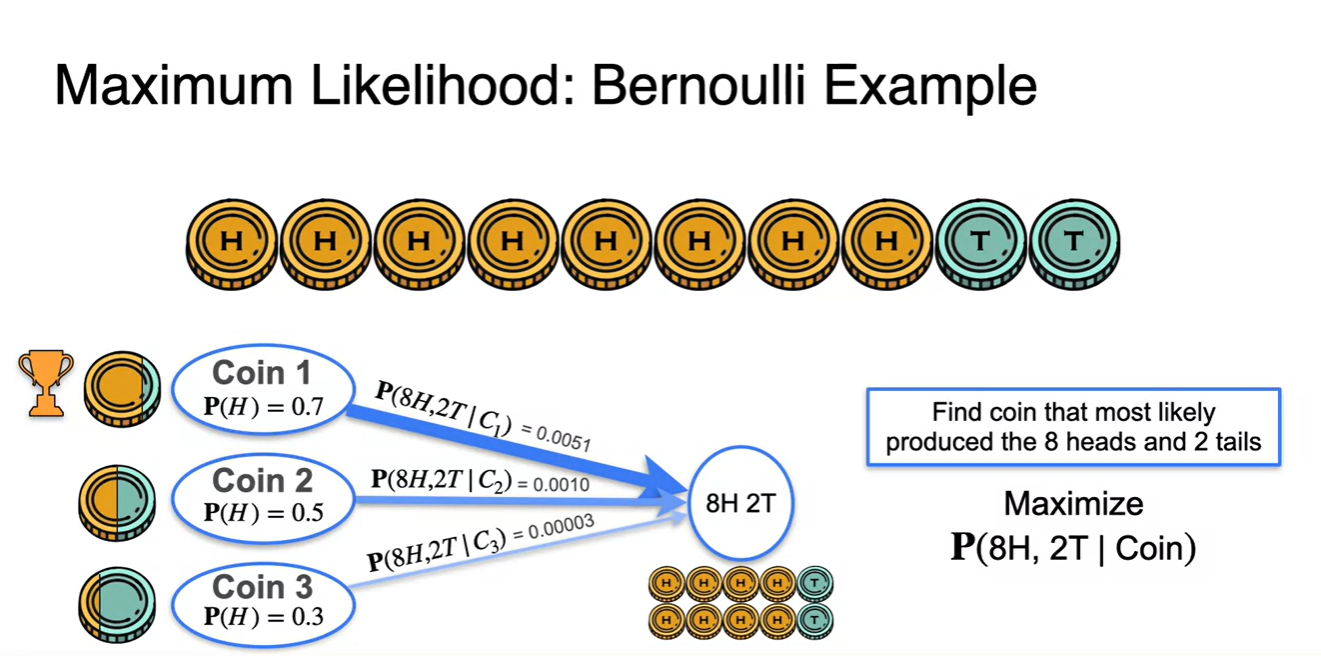
Head의 관측이 Tail의 관측보다 높게 나왔다는 건 Head가 나올 확률이 더 높을 것이라는 것으로 추측할 수 있다.
- 실제 계산을 통해 probability를 계산해보면 Coin 1의 distribution이 확률이 제일 높다는 것을 알 수 있다.
-
따라서 확률을 Maximize하는 경우의 수는 이다.
- 와 의 확률은 에 비해 값이 그리 크지 않다.
-
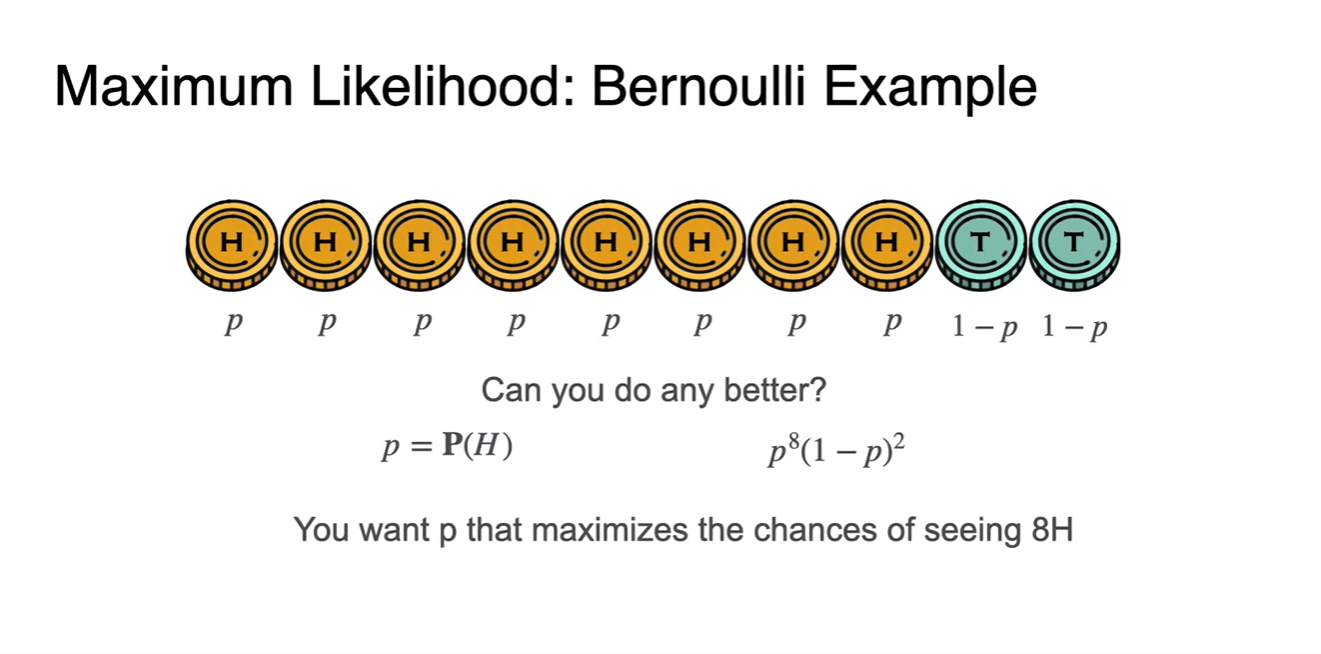
그렇다면 "8H가 나오는 결과"를 얻기 위한 확률 는 얼마라고 예상할 수 있을까?
- 가 parameter 가 되어, 전체 확률인 를 maximize하는 를 찾아보도록 하자.
-
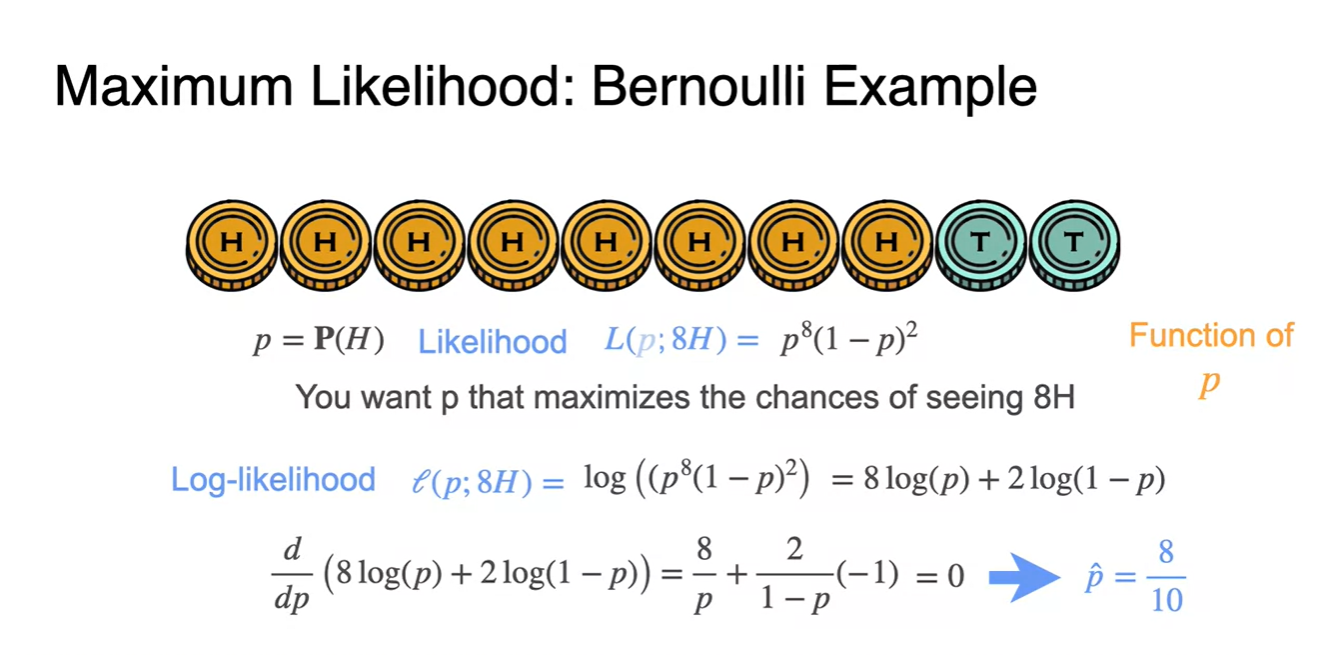
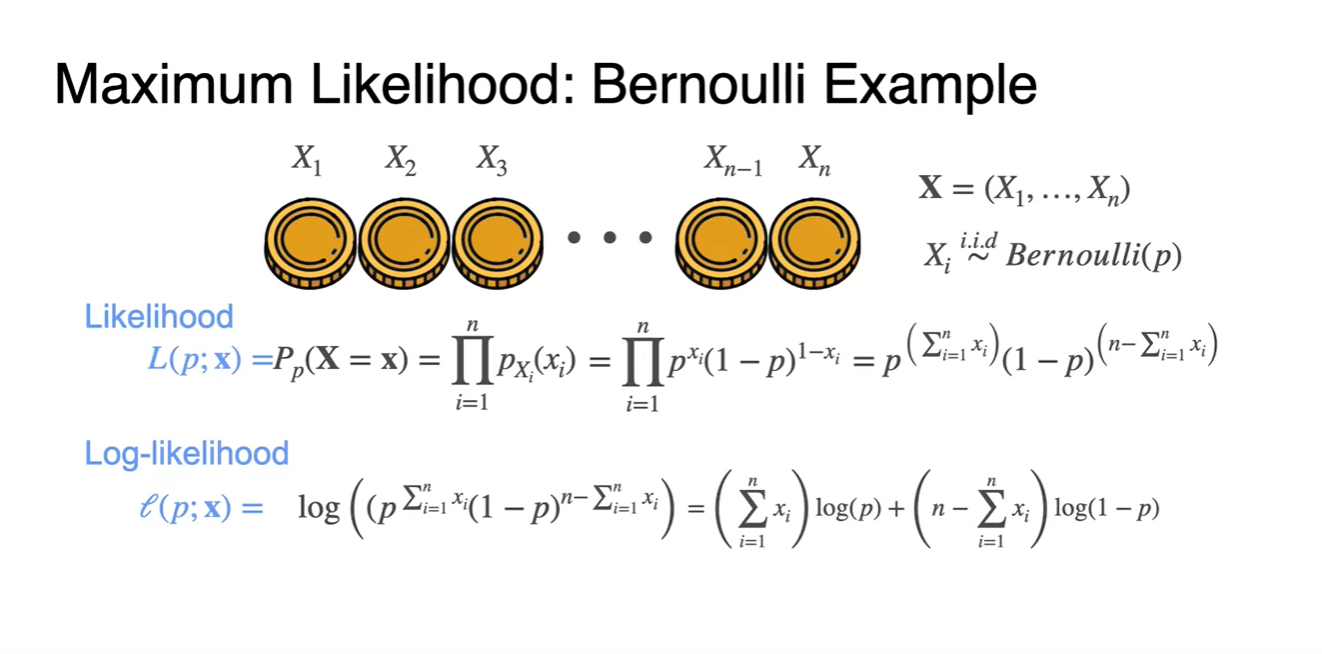
10개의 동전을 던져 8H가 나오는 시행 결과의 Likelihood는 에 대한 function으로 전개되어 로 표기한다.
-
이 때 확률 parameter인 는 의 범위를 갖기 때문에 scale 조정을 위해 log을 취하여 Log-Likelihood로 계산한다.
-
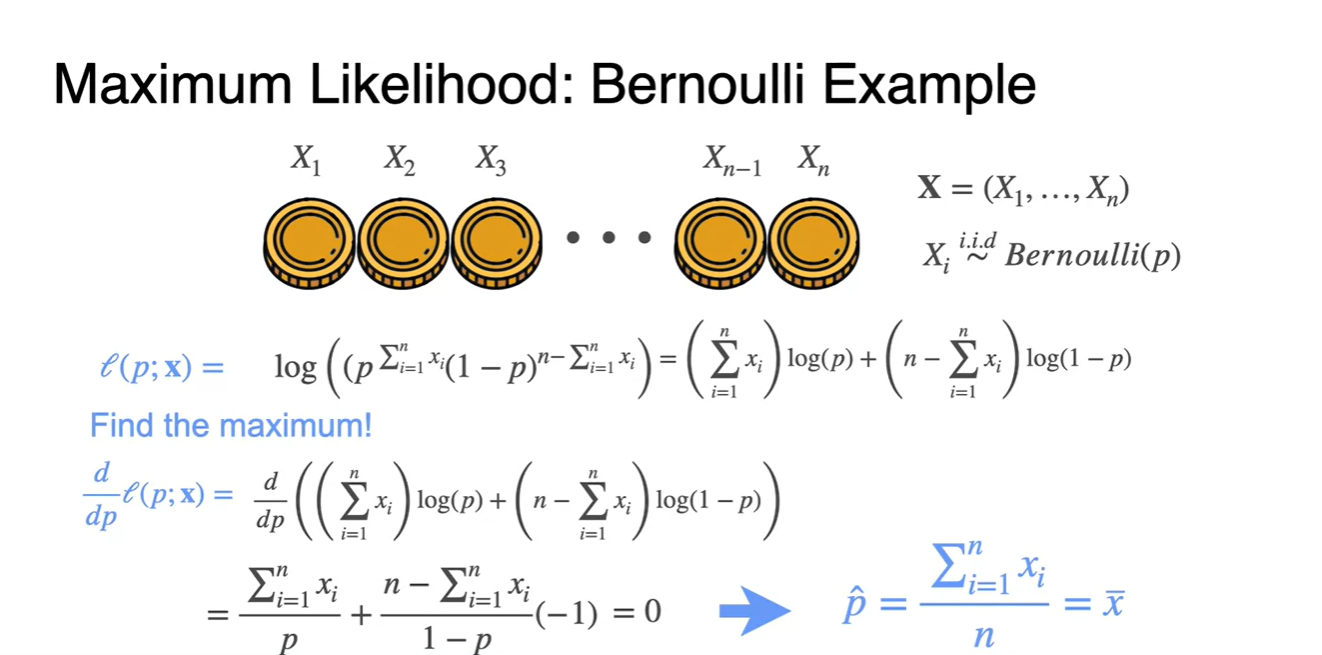
이러한 Log-Likelihood 의 미분을 구해 최댓값을 찾으면 로 얻어짐을 알 수 있다.
-
-
Bernoulli 예시에서의 Maximum Likelihood를 정리해보자.
을 포함하고 i.i.d한 가 를 따른다면
-
Likelihood는
- if ,
- if ,
-
즉, 동전 하나를 던졌을 때 Head가 나올 단일 확률이 , Tail이 나올 단일 확률이 라는 얘기다.
-

-
전체 동전의 개수가 이라면 head는 , tail은 로 나타낼 수 있다.
-
따라서 시행 횟수가 여러 번일 때 Likelihood는 로 표현할 수 있따.
- 이를 log 취해 Log-likelihood로 만들어 최종 최댓값을 계산한다.
-
-
미분해서 0이 되는 지점은 최댓값인 지점이라고 볼 수있다. (현 function 기준)
- 계산 결과 최대화 확률 추정값 는 즉, sample 평균인 로 계산되었다.
MLE: Gaussian Example
-
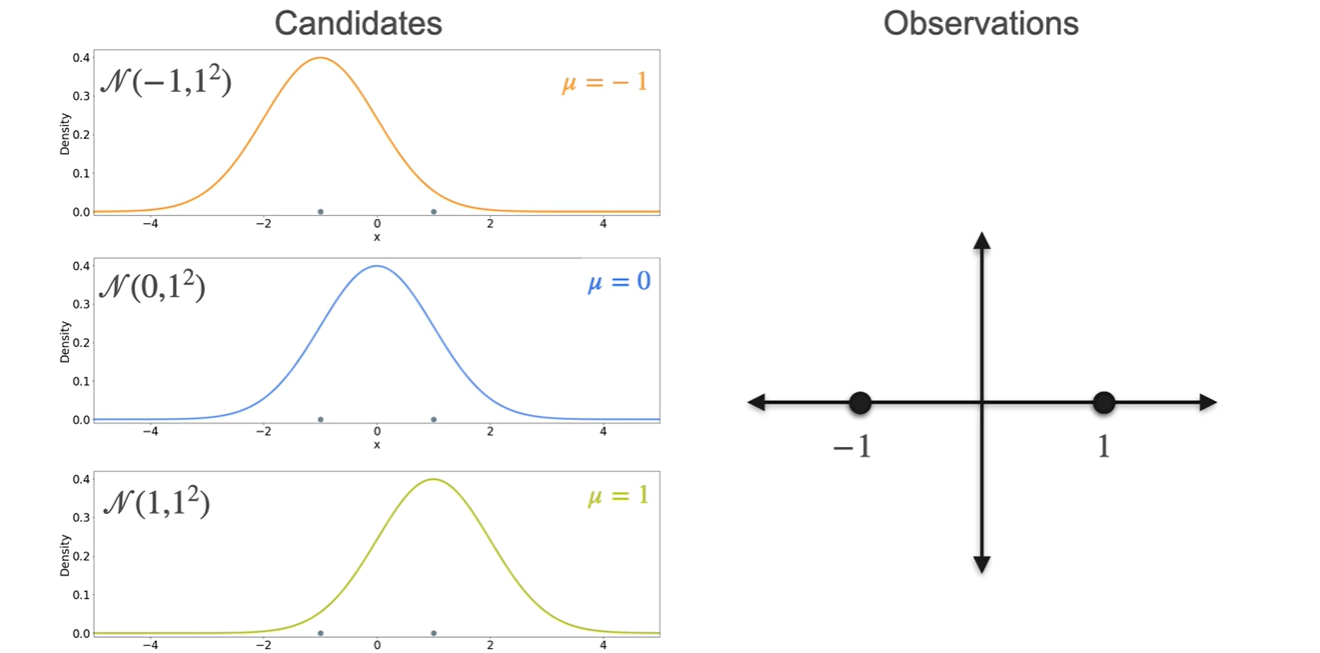
오른쪽 아래와 그림과 같이 Observations이 {-1, 1}로 관측되었다고 하자.
- 왼쪽에 놓인 Normal distribution 후보 , 중에서 해당 observations을 가장 잘 설명할 수 있는 분포는 무엇이겠는가?
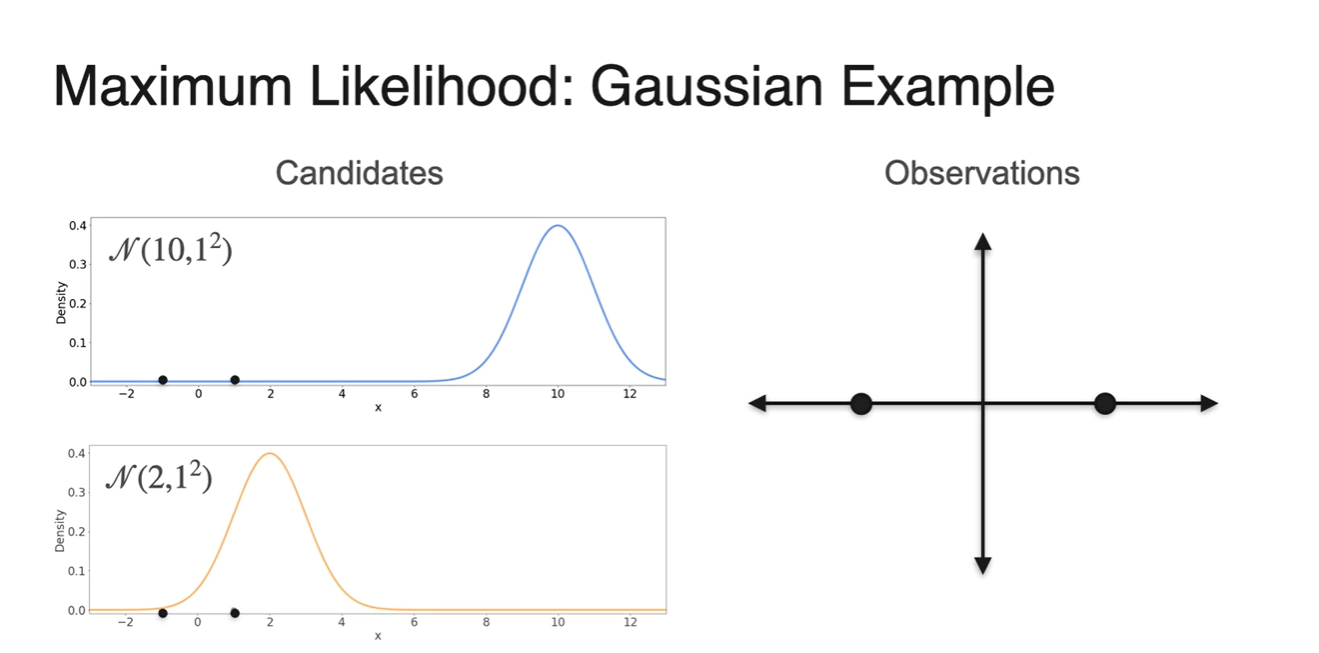
-
{-1, 1} 지점의 probability density(높이)를 구해보면 는 heights가 거의 0에 가까운 값을 갖는다.
-
그에 비해 의 heights는 다소 높은 값을 가지므로 more likely하다고 말할 수 있다.
- 즉, -1이나 1의 i.i.d random variables가 발생할 수 있는 확률이 크게 존재하는 그래프를 선택하는 것이 마땅하다.
-

-
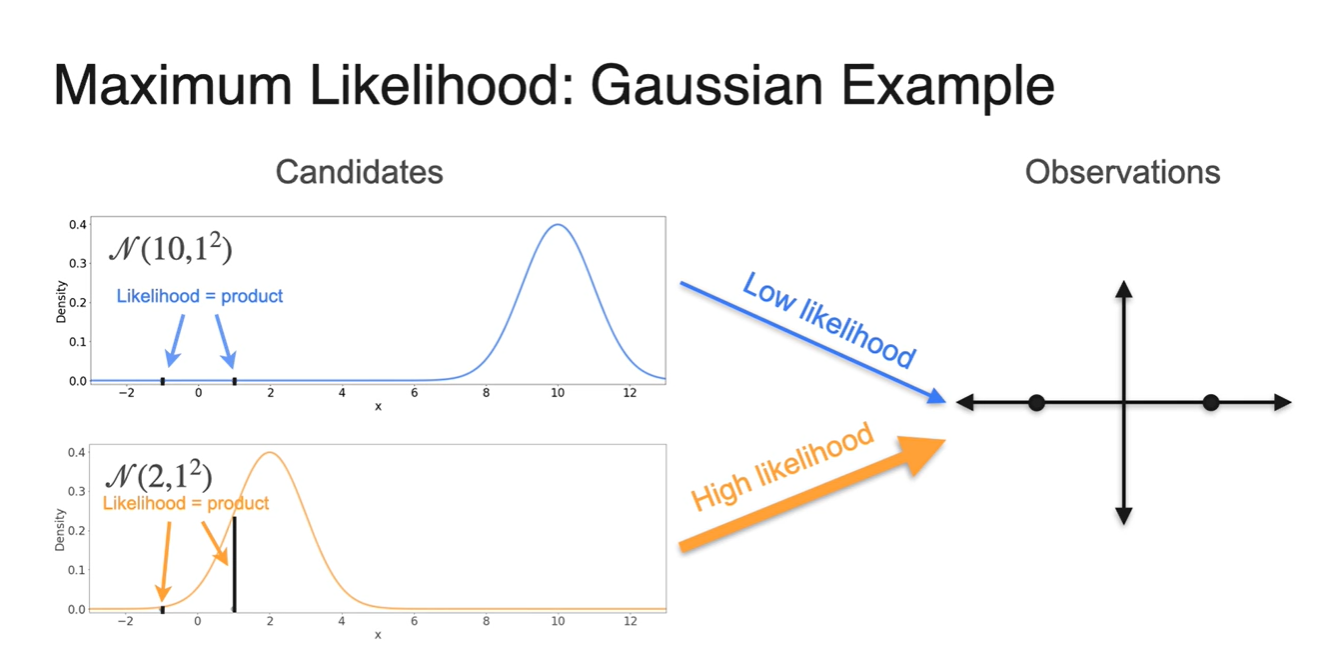
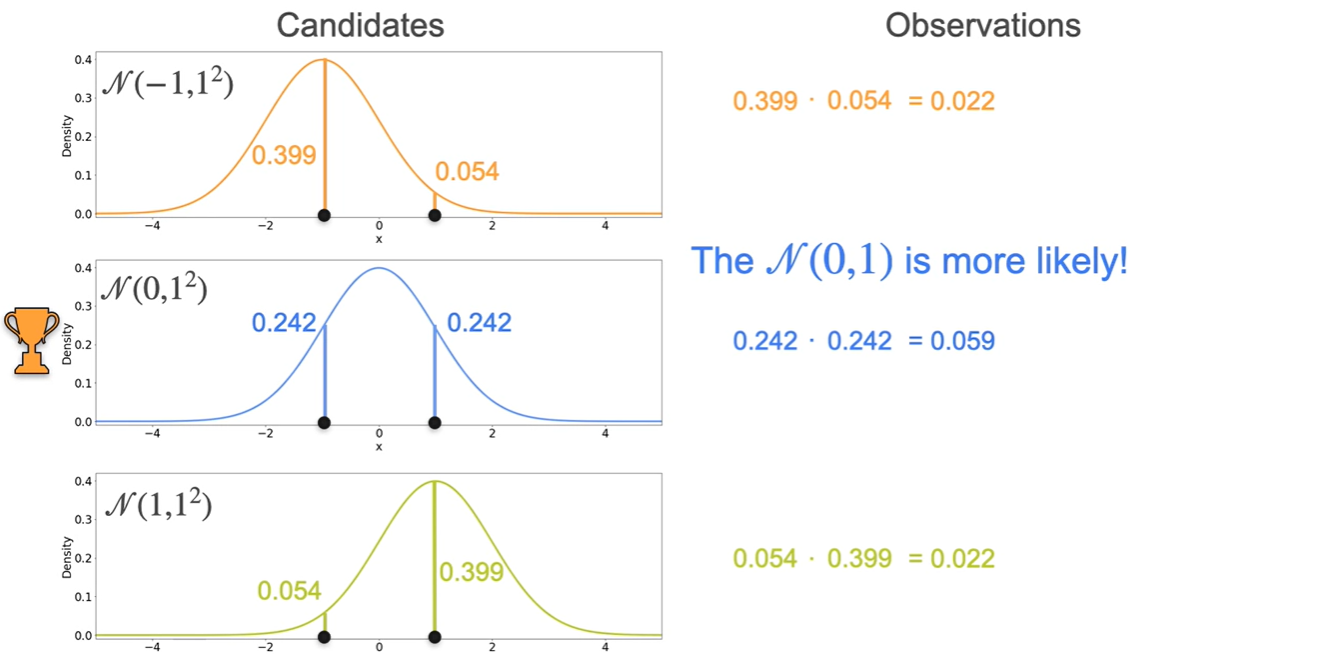
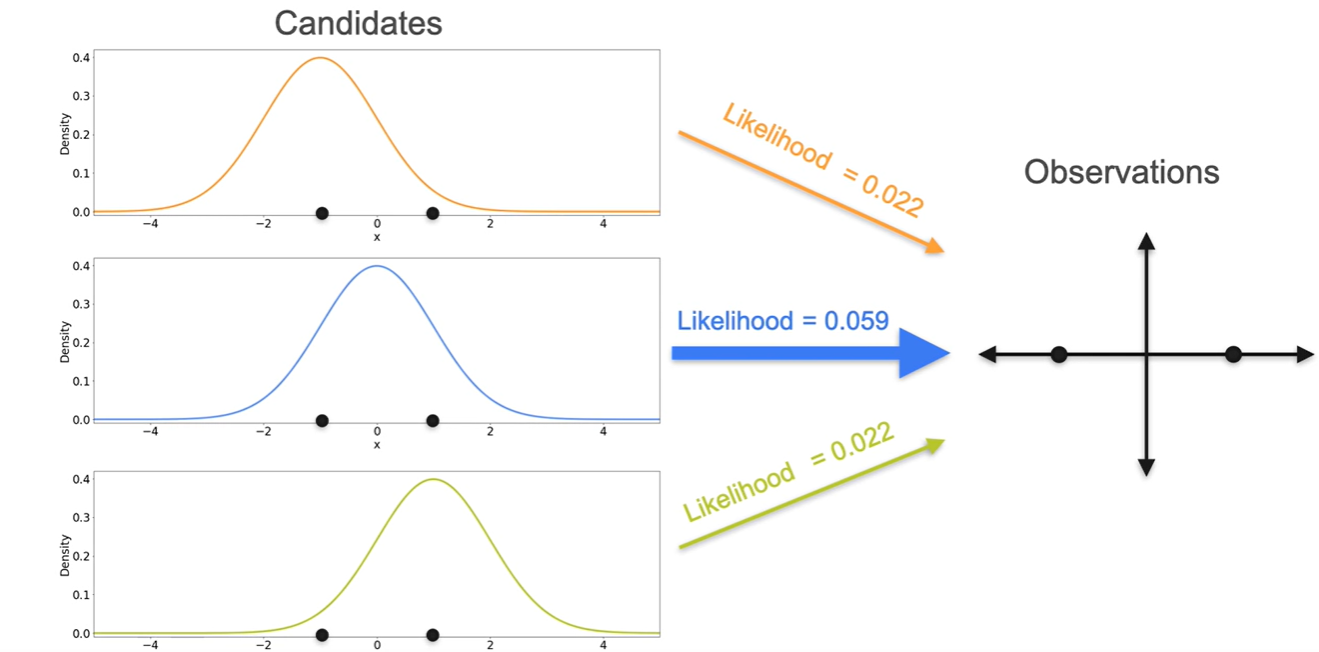
Likelihood는 각 i.i.d random variables의 density를 곱하여(product) 구한다.
- 이를 통해 보다 분포가 현재의 Observations를 더 잘 설명(High likelihood)한다는 것을 증명할 수 있다.
-
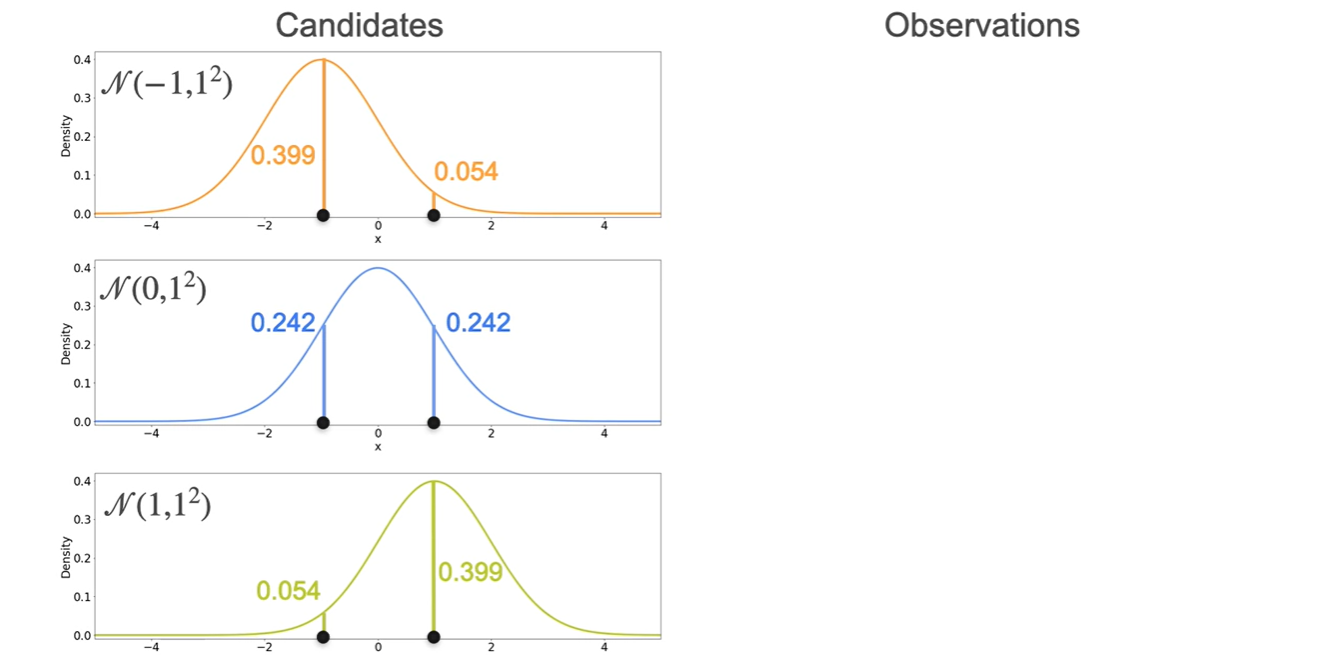
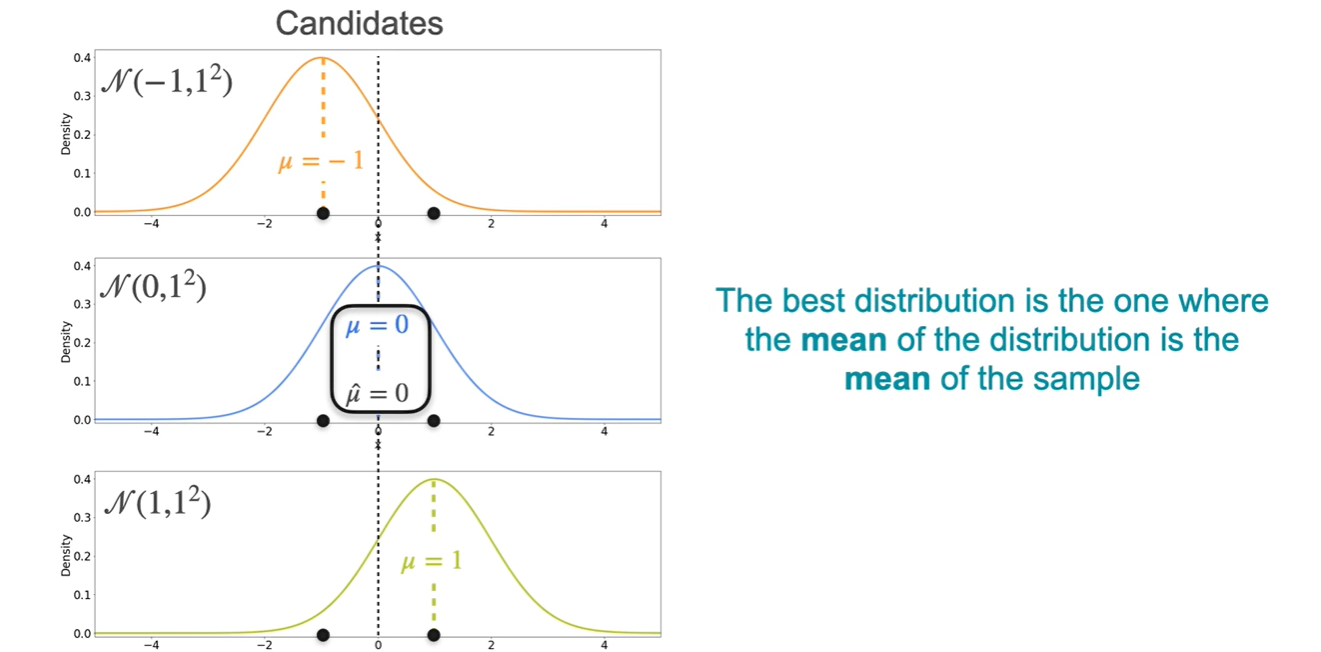
이번에는 아래 , , 세 후보 중에서 현재 Observations를 잘 설명하는 분포가 무엇일지 Likelihood를 활용하여 찾아보도록 하자.
- 평균은 , , 인 3개의 선택지가 있다.
-
Random variables인 과 의 density를 각각 구해 그래프에 나타낸 결과가 아래와 같다.
- 각각의 값을 곱하여 표현하는 이유는 과 이 일어날 사건이 independent identically distributed(i.i.d)하다고 가정하고 있기 때문이다.
-
세 후보의 Likelihood를 계산한 결과 이 more likely하다는 점이 밝혀졌다.
- :
- : ★
- :
-
이를 통해 알 수 있는 사실을 일반화하면
The best distribution은 sample mean과 동일한 mean을 갖는 distribution이다.
-
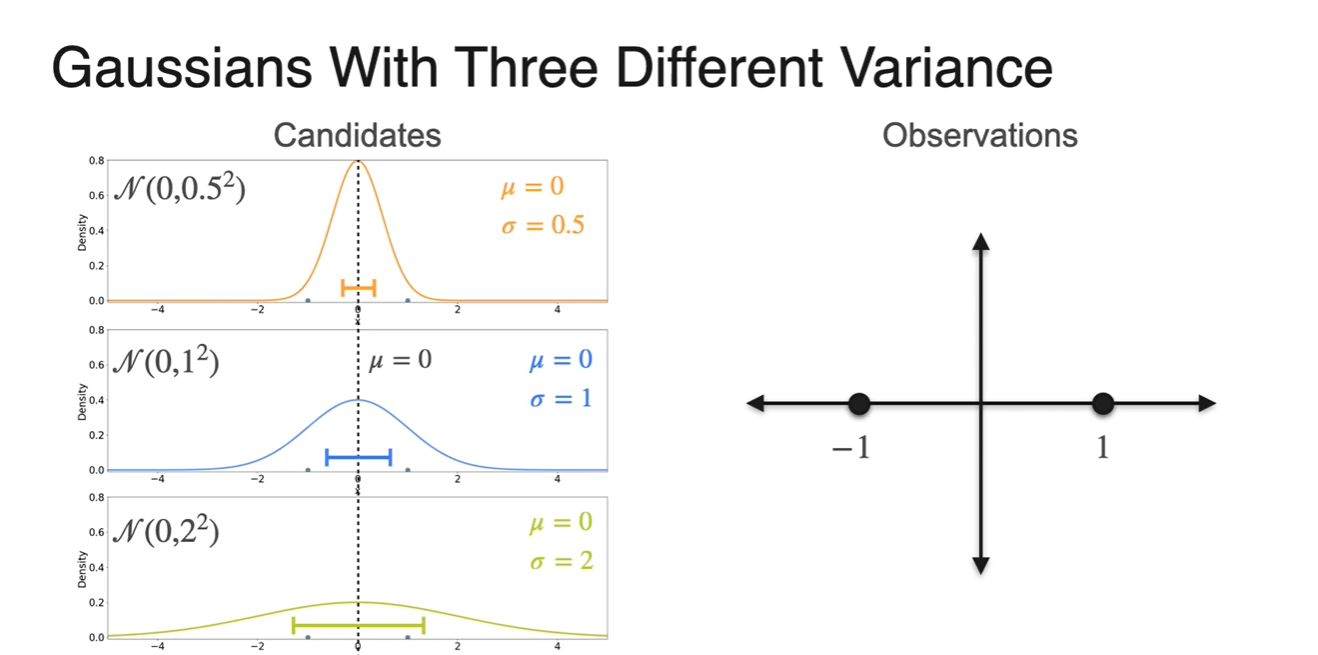
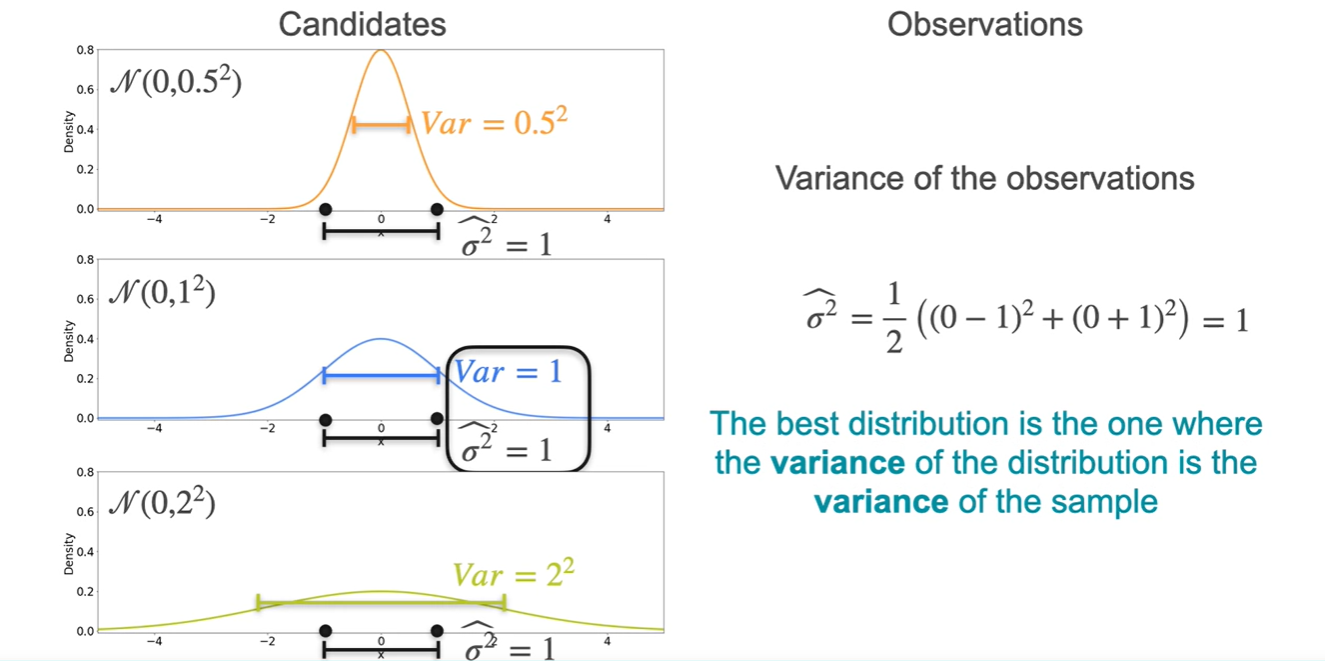
이제 Variance는 어떻게 설정하면 되는지 살펴보자.
- 각 분포의 mean은 모두 0으로 동일하게 설정하였고, variance는 , , 을 3가지 후보로 설정했다.
-
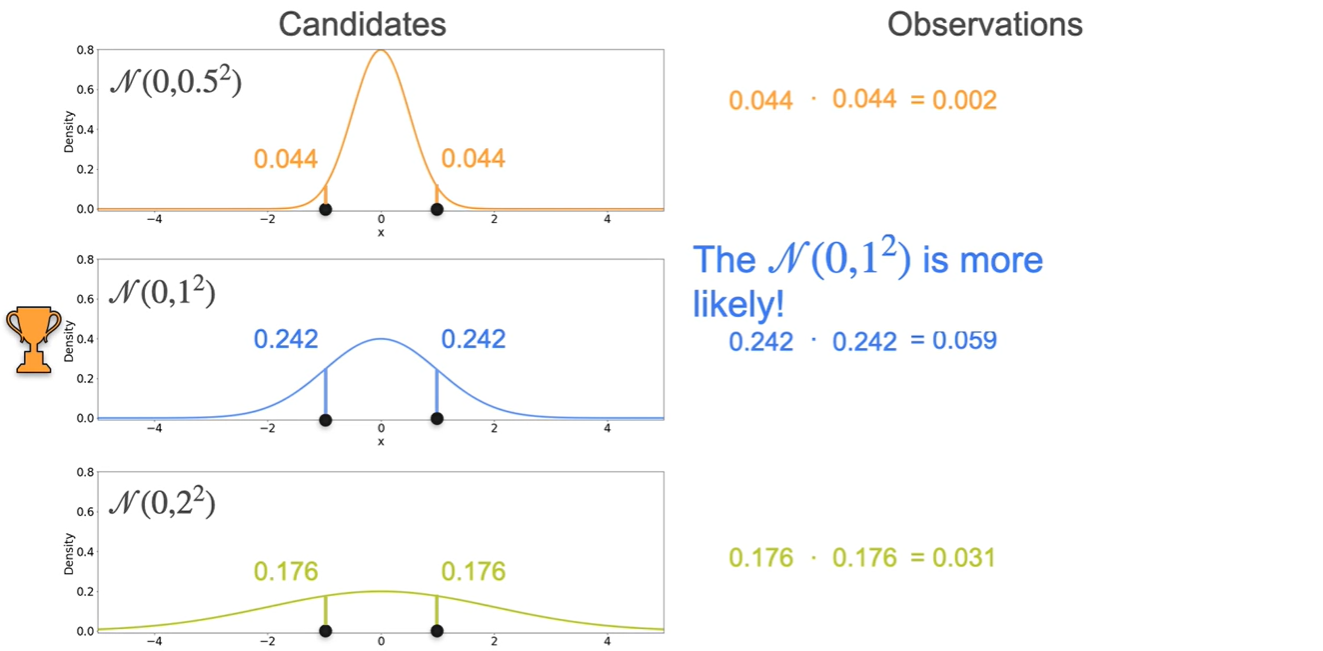
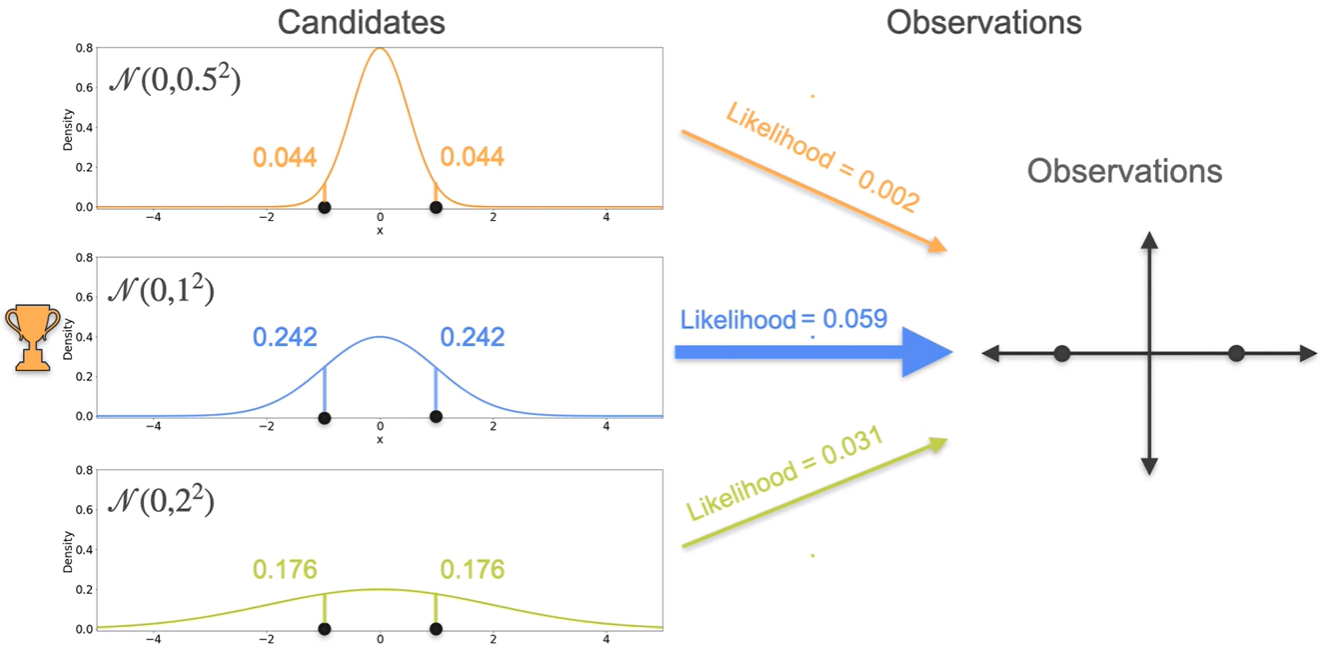
마찬가지로 각 분포의 density product를 통해 계산한 결과, 분포가 more likely하다는 것이 밝혀졌다.
- :
- : ★
- :
-
이를 통해 알 수 있는 사실을 일반화하면
The best distribution은 sample variance와 동일한 variance을 갖는 distribution이다.
-
기존 sample variance는 population variance로 표현하기에는 다소 biased(underestimated)되어 있어 이 아닌 로 나눠주어야 한다고 했었다.
- 그러나 MLE에서의 variance는 을 사용한다는 점에서 조금 다르다.
-
MLE for Gaussian population (Optional)
-
Mean이 이고 Variance가 인 Gaussian distribution에서 개의 samples를 뽑았다고 가정해보자.
-
-
MLE for and 를 위해서는 먼저, likelihood를 정의해야 한다.
-
Normal distribution's PDF :
-
Likelihood given
:
-
-
Scale 조정을 위해 log를 씌워 log-likelihood를 구해보면 아래와 같다.
-
-
이를 Maximizing하는 parameter 와 값을 찾기 위해 각 변수로 미분해보자.
-
-
이제 와 를 0으로 만드는 parameter 와 를 구해보자.
-
The only difference is the normalizing constant: for the MLE you have while for the sample standard deviation you use
MLE: Linear Regression
-
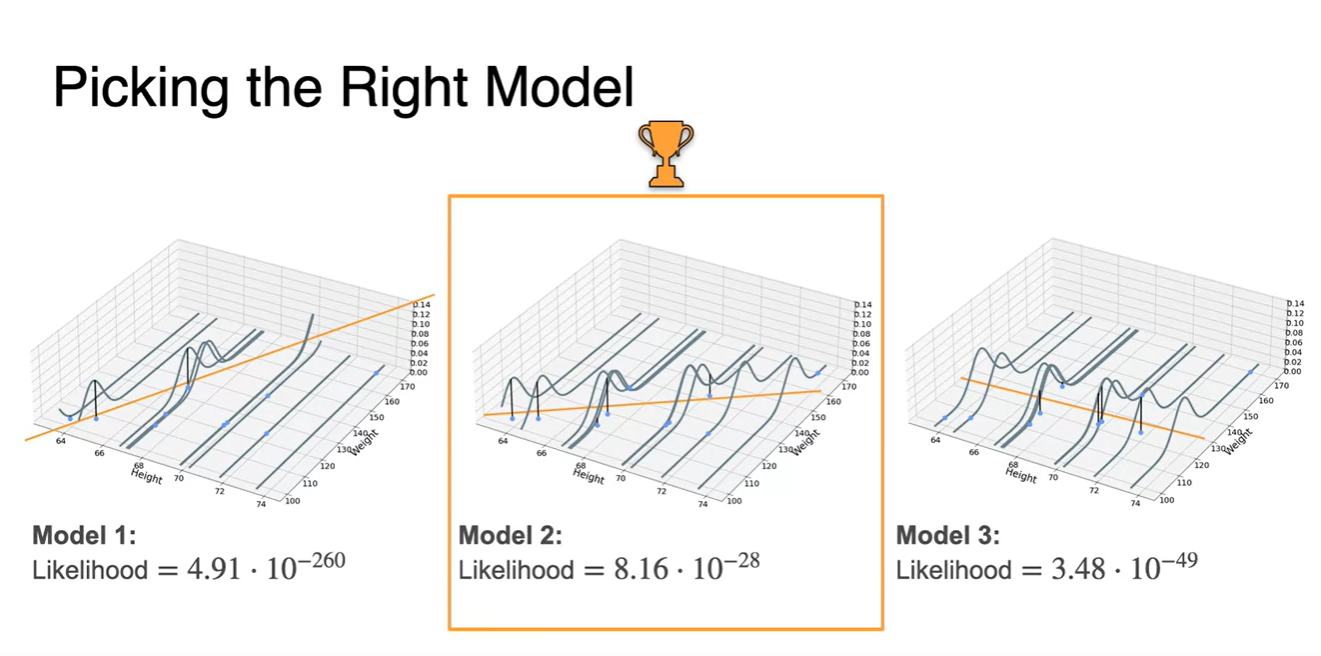
Likelihood를 찾는 과정은 를 Maximize하는 model을 선정하는 것이라고 하였다.
- 만약 Model 2의 가 다른 model들에 비해 값이 컸다면 해당 모델이 현재의 data를 가장 잘 설명하는 likelihood라고 할 수 있다.
-
다음과 같은 오른쪽 Data의 likelihood는 Model 2다.
- 육안으로 보기에도 현재 data 분포를 가장 잘 설명한다고 볼 수 있다.
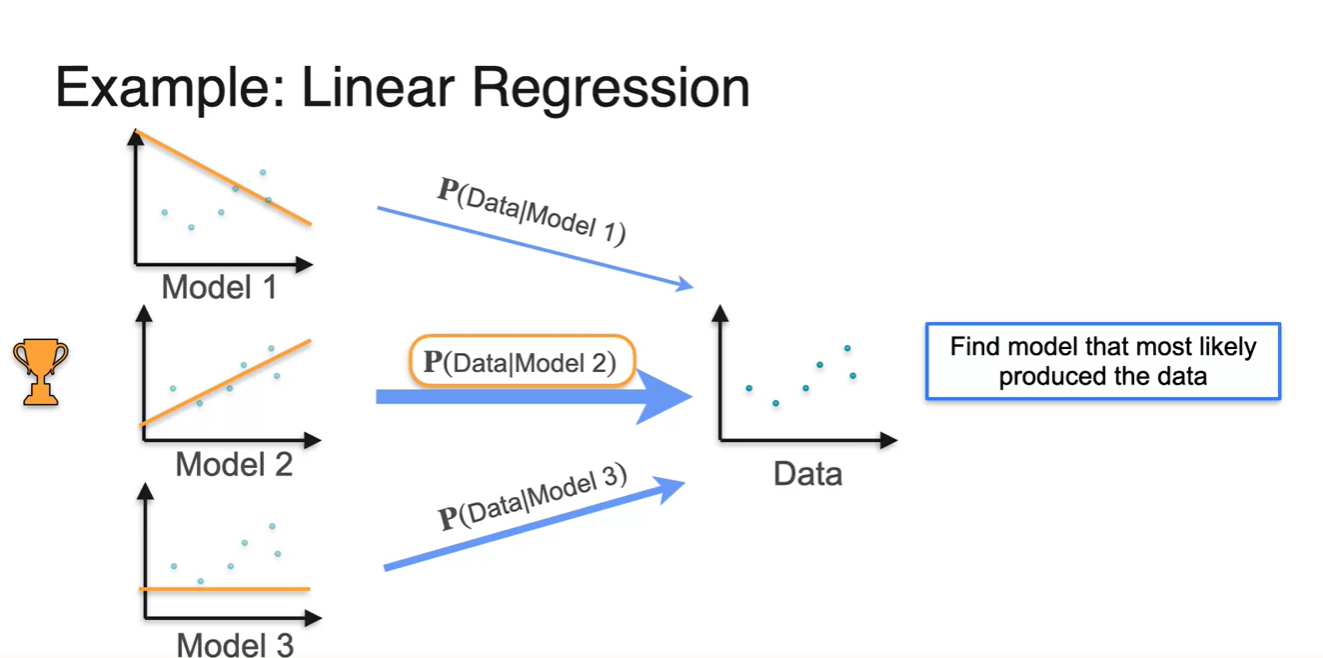
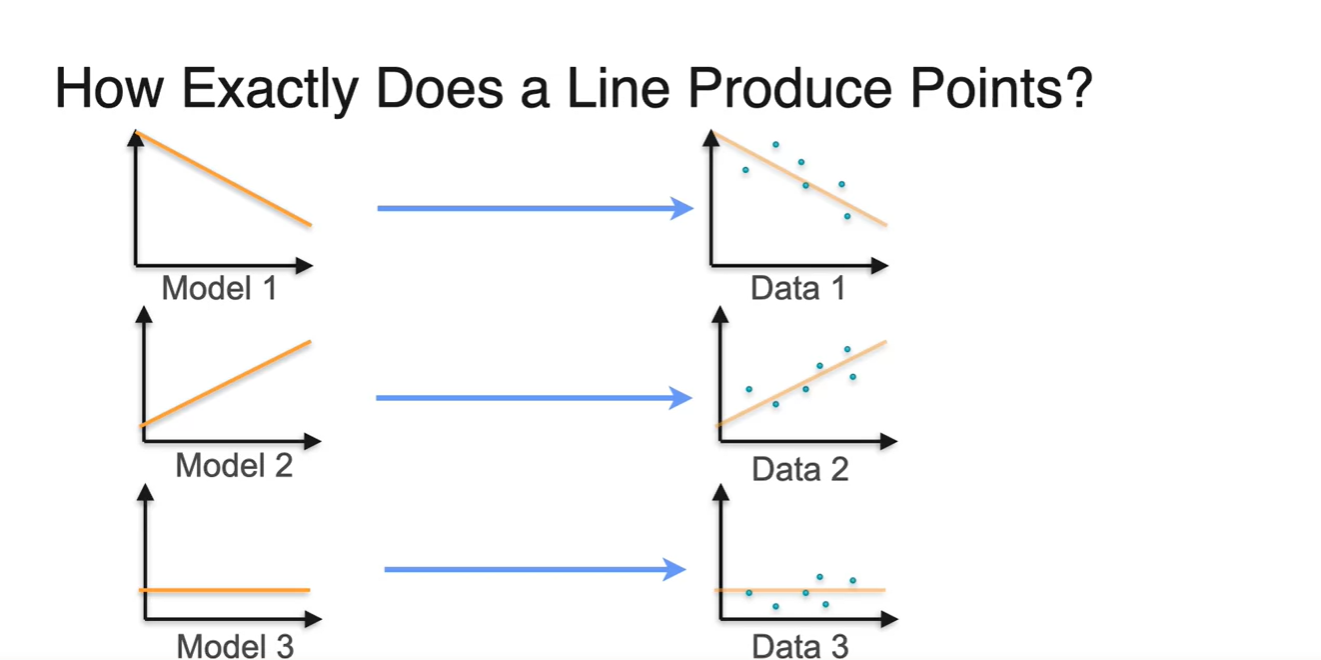
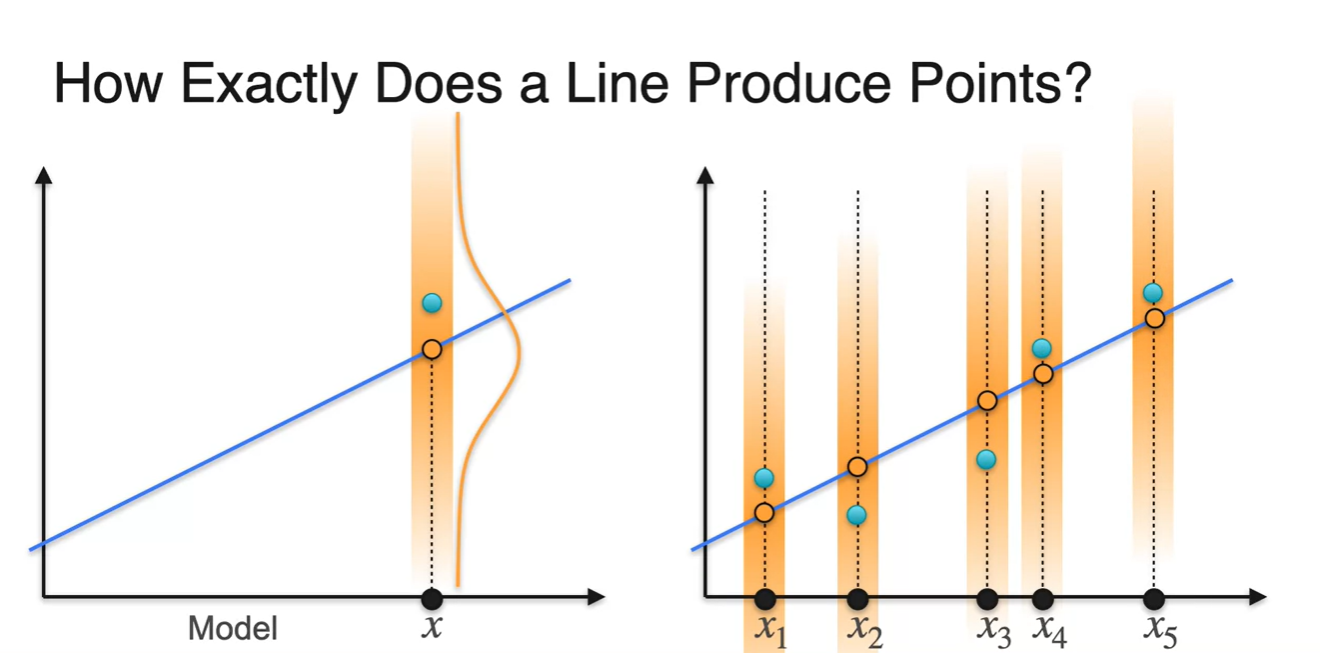
- 그렇다면 각 Model들은 어떤 점들(points)을 sampling(produce)하게 될까?
-
어떠한 모델이 나타내는 그래프의 한 점을 center(mean)로 하는 Normal distribution을 가정해보자.
-
이 때, 실제 데이터 중 한 점이 이와 같은 분포에서 sampling된 점이라고 생각해보는 것다.
- 그렇게 되면 실제 데이터 상에 존재하는 모든 점들은 model이 나타내는 random variables 마다의 분포에서 sampling된 것이라고 가정할 수 있게 된다.
-
-
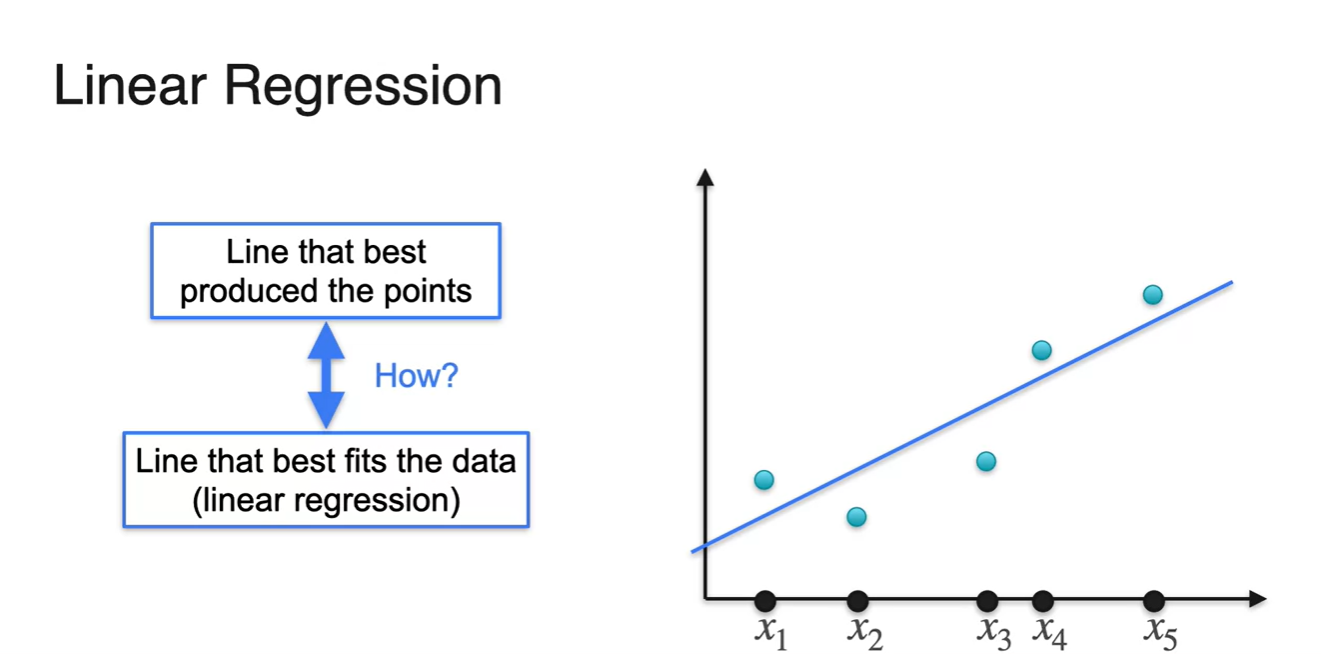
결국 Linear Regression은 각 point들을 가장 잘 producing하는 분포를 찾아내는 과정이라고 볼 수 있다.
- 이는 전체 data에 가장 fit한 line을 찾아내는 과정과 일치한다. (but How?)
-
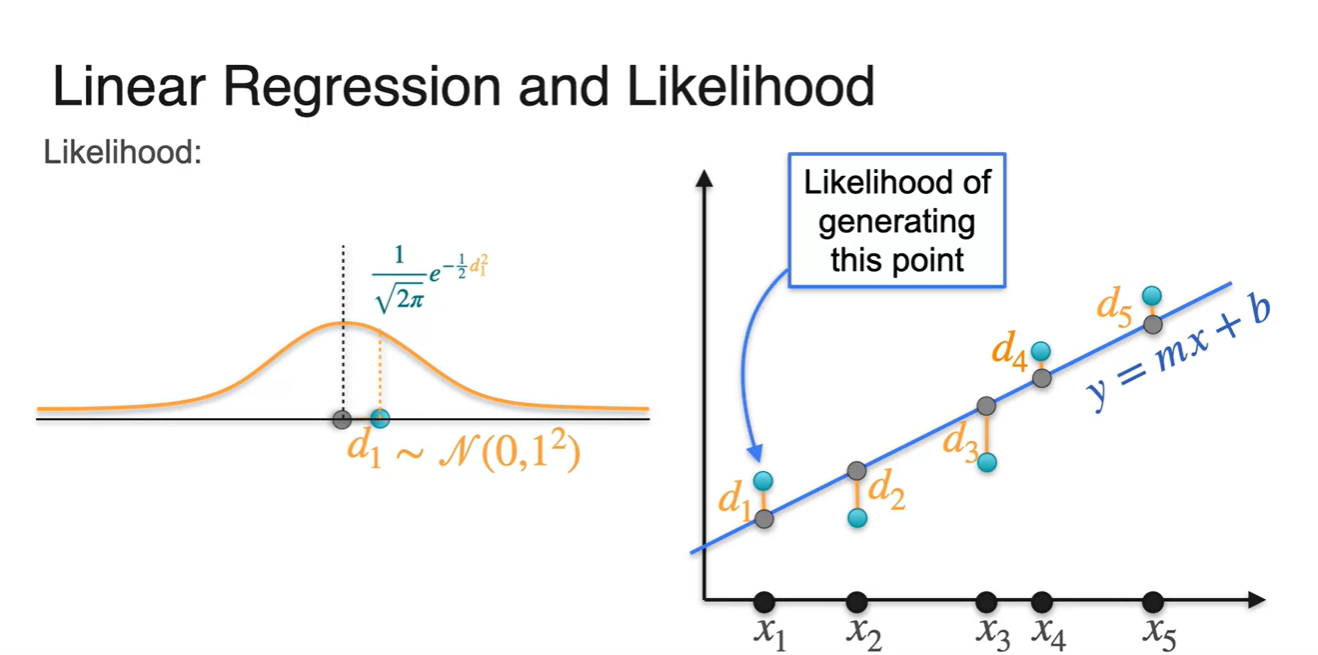
오른쪽 그래프에서 나타내는 line은 과 가 parameter인 로 표현되는 수식이다.
-
이제 Regression line에서 표현된 point(회색)들에 의해 centered된 정규 분포로부터, 실제 data points(초록색)를 generating(or producing)하는 관점으로 바라봐보자.
-
각 정규 분포들은 평균이 0인 를 따르므로 실제 data point와의 차이인 은 중심으로부터 떨어진 값이라 볼 수 있다.
-
따라서 Normal distribution의 PDF에 의해 해당 probability의 density는 로 표현된다.
-
-
-
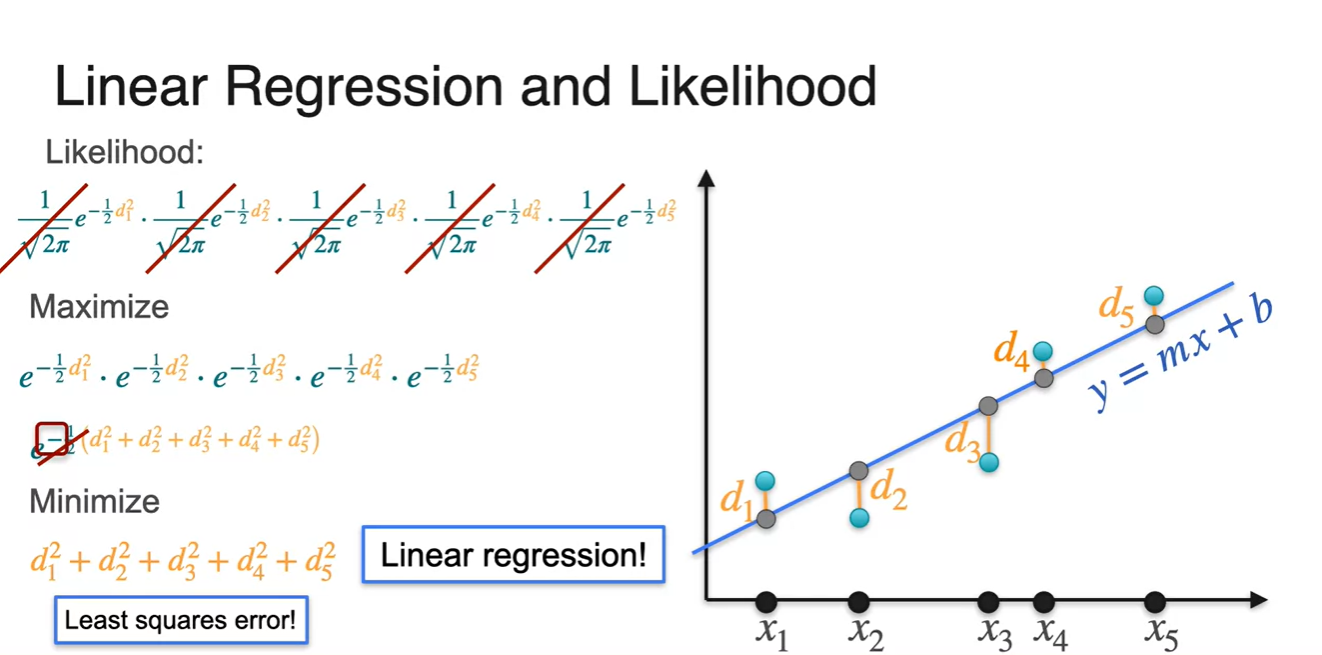
각 data points는 i.i.d하므로 likelihood의 계산식은 각 의 곱이다.
-
이를 Maximize하기 위한 수식으로 정리하면 exponential의 지수 합으로 표현할 수 있고, 가 붙어있으므로 distance인 의 합을 Minimize하는 수식으로 치환된다.
Linear regression의 Maximize (log) likelihood = Minimize squared error다!
-
-
처음에 나왔던 model 3개의 정규 분포를 각 data point마다 나타낸 그래프가 시각화되어 있다.
- 3가지 model의 likelihood를 계산해 본 결과, 현재 data 분포를 가장 잘 설명하는 maximized likelihood는 model 2임을 계산할 수 있게 되었다.
Regularization
-
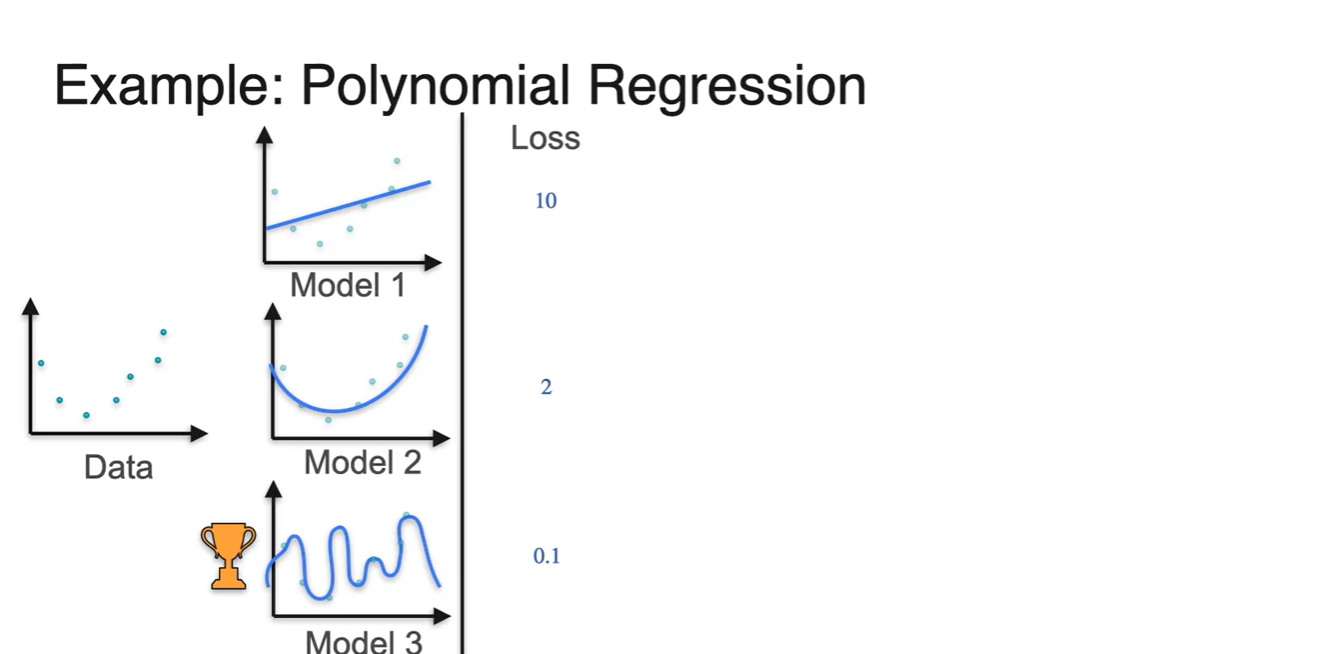
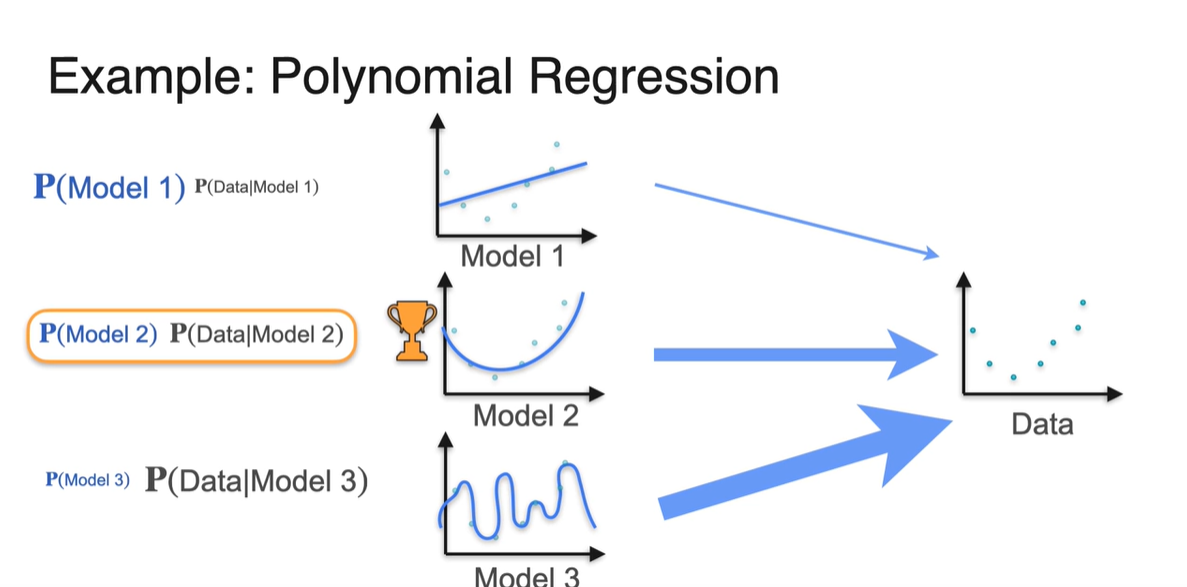
이번에는 Polynomial Regression 상황을 가정해보자.
-
Model을 표현할 수 있는 수식의 제한이 linear에서 polynomial로 복잡도가 늘어난 것이다.
- 이렇게 되면 Model 3의 loss가 가장 낮기 때문에 현재로서는 가장 좋은 모델이라고 판단할 수 있다.
-
-
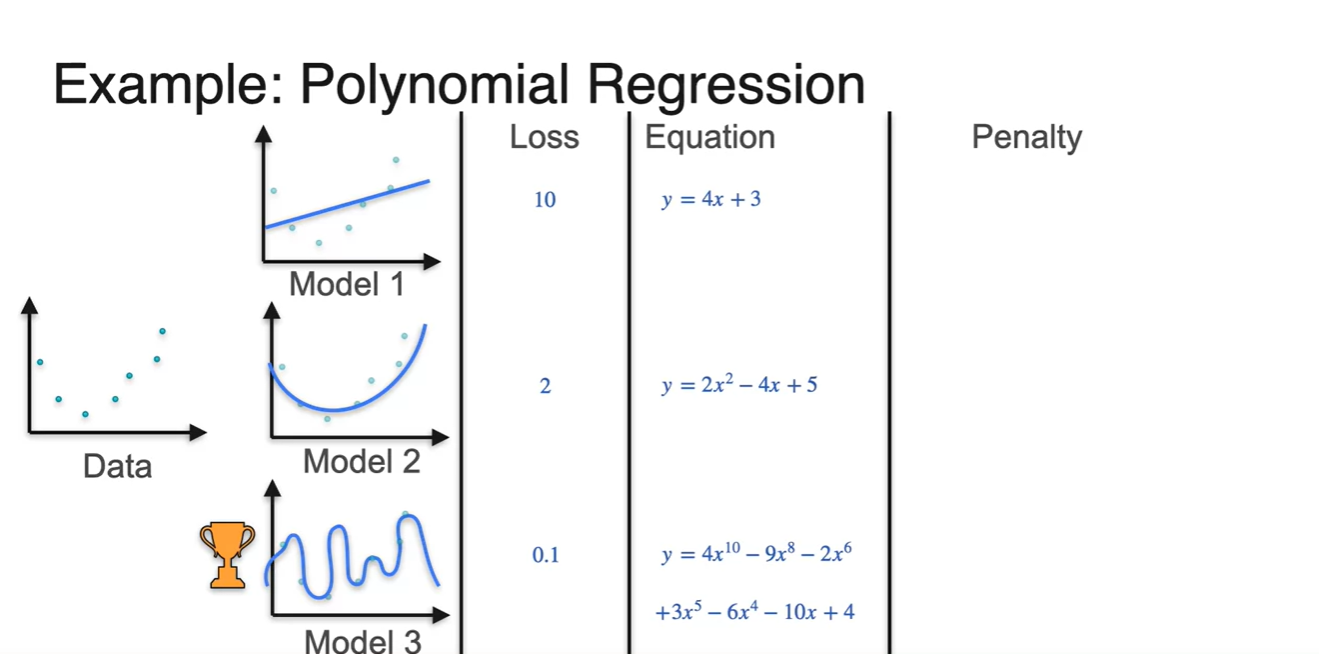
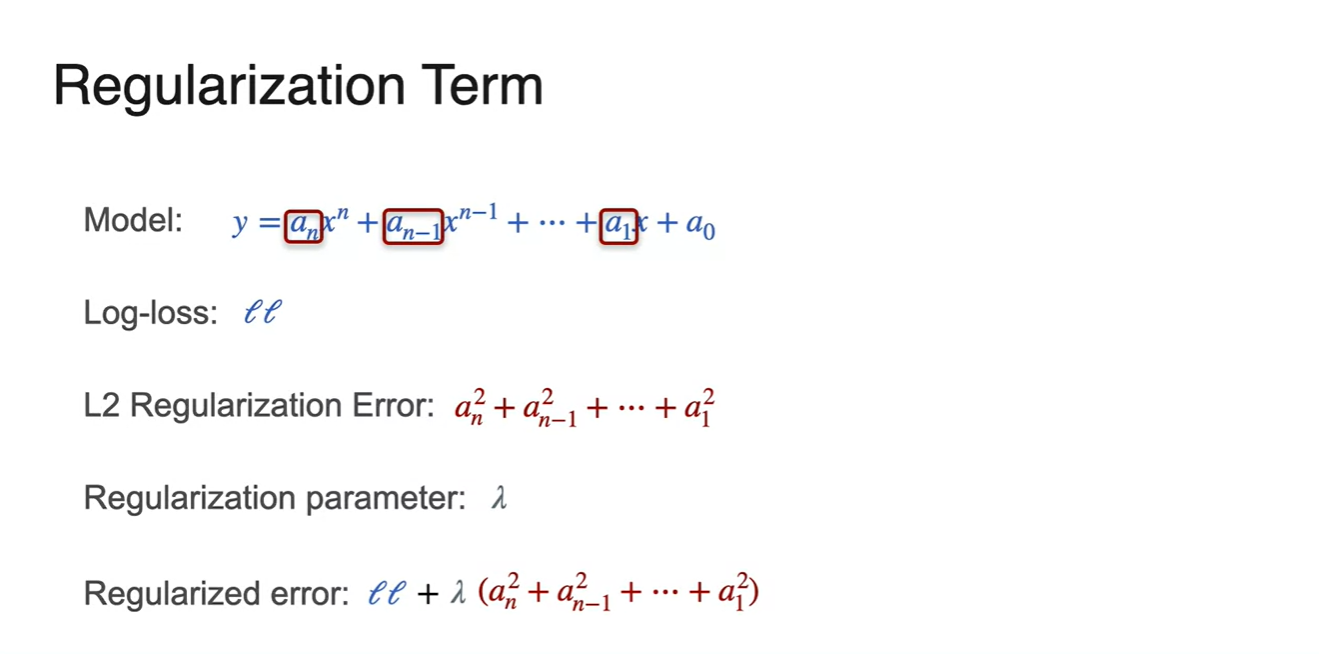
Equation으로 표현하면 아래 수식과 같다.
- 그러나 모델의 표현력이 너무 강할수록 caotic해지기 때문에, 이에 대한 penalty를 적절히 줄 수 있어야 한다.
-
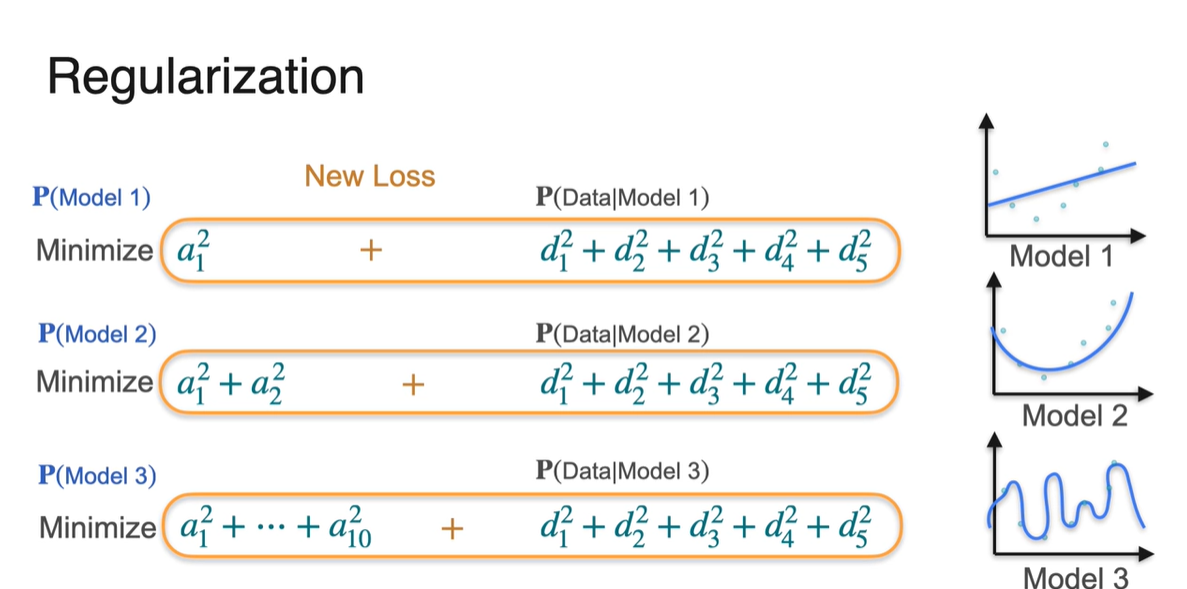
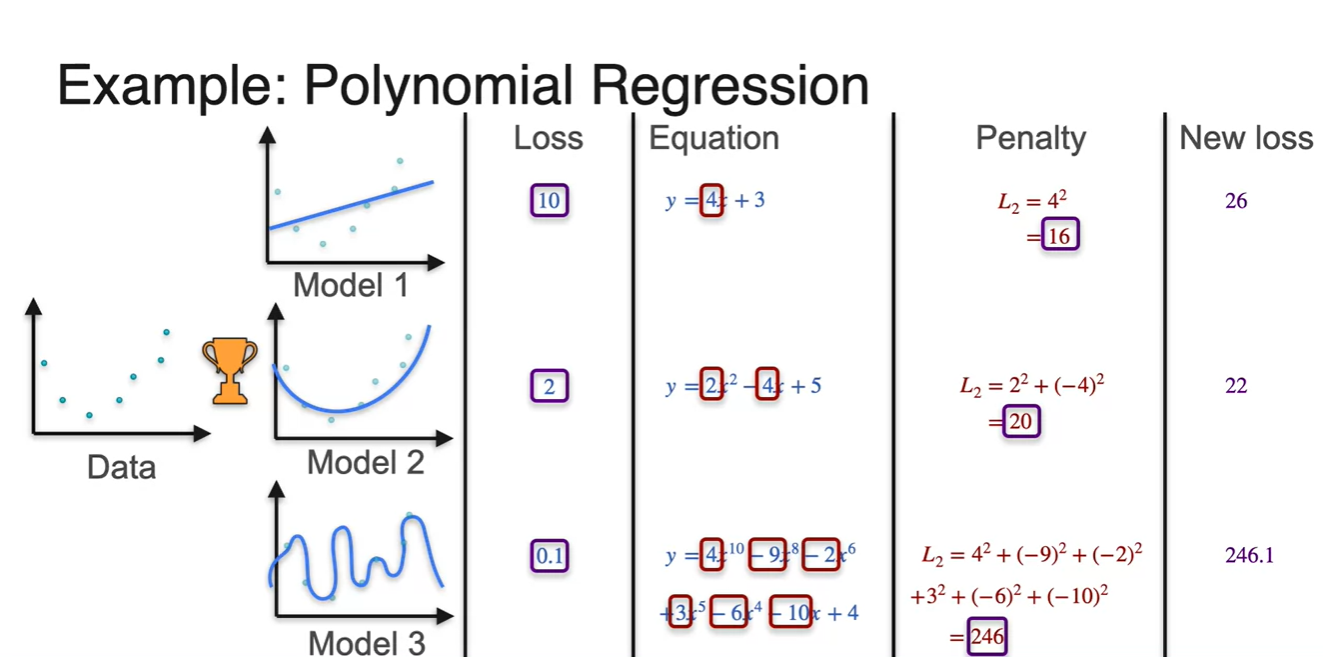
이제 penalty를 적용하여 새로운 loss를 표현해보자.
-
각 polynomial의 계수들의 제곱을 합하여 penalty로 가정하고, 이를 기존 loss에 더하여 새롭게 loss를 표현한 결과가 다음과 같다.
- 이를 통해 Model 2의 loss가 가장 작다고 계산되어 best model로 선정될 수 있게 되었다.
-
-
Regularization Term에 대해 정리하면 아래와 같다.
- 최종적으로 우리는 를 loss로 취급한다.
Back to "Bayesics"
-
우리는 바닥에 팝콘이 놓여져있을 때의 예시를 통해 likelihood에 대해 이해했었다.
- 이곳에서 무슨 일이 일어났을지에 대한 probability가 가장 높은 값이 Movies라는 것을 알 수 있었고, 이는 evidence 역할을 하기에 충분하다.

-
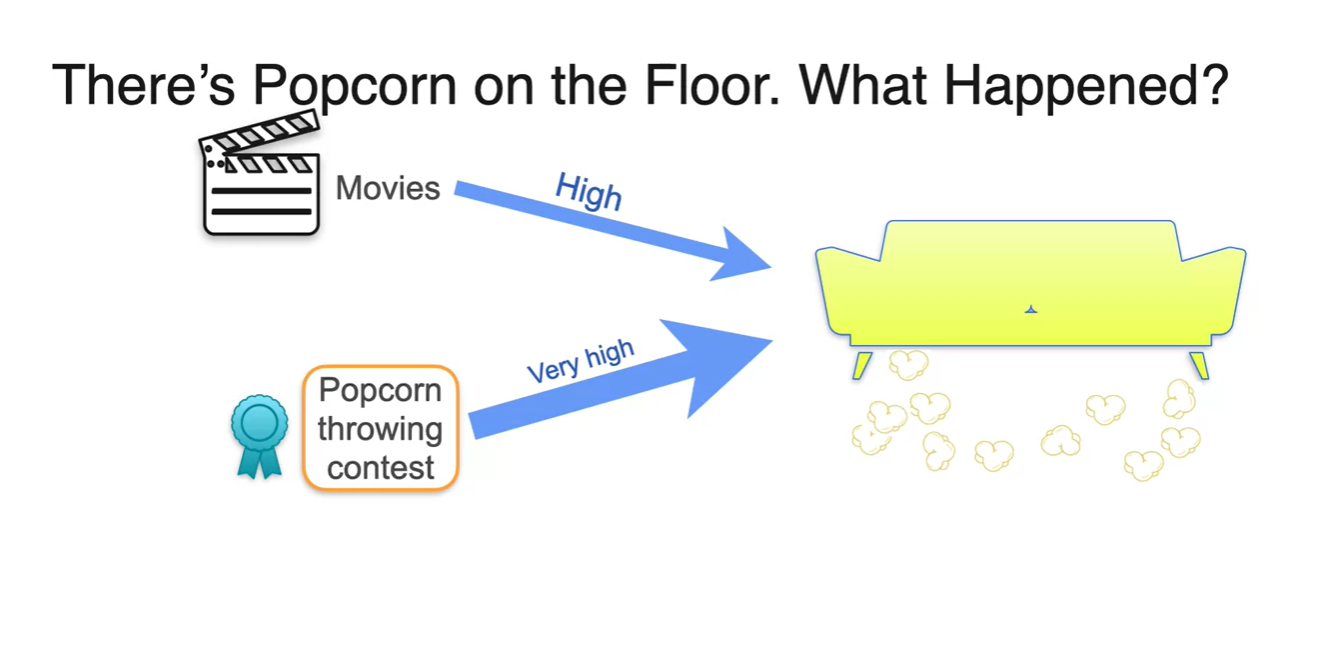
그런데 만약 Popcorn throwing contest가 열린 상황까지 추가된다면 어떨까?
- 이럴 경우 팝콘이 떨어져있는 관측에 대한 evidence 확률은 throwing contest가 더 높고 more likely 하다.
-
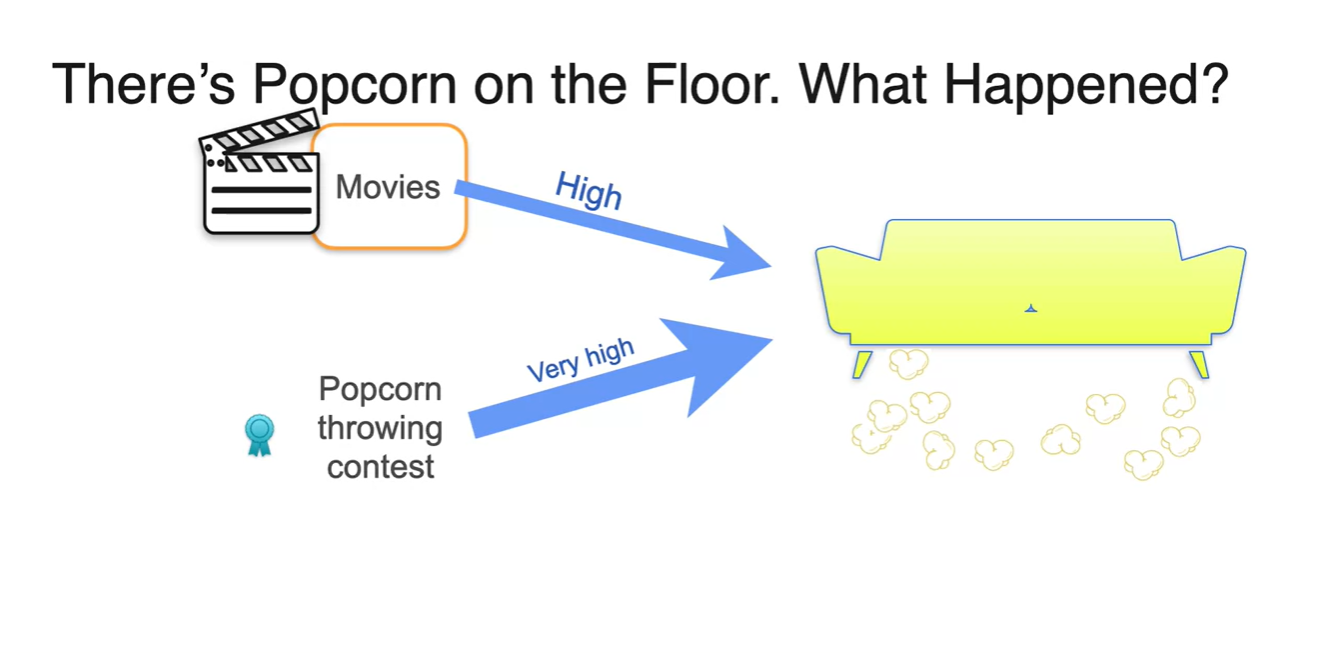
그러나 팝콘이 떨어져있는 상황을 제외하고 본다면 Popcorn throwing contest가 일어날 상황보다 Movies를 보는 상황이 더욱 빈번하게 일어난다.
- 즉, Movies를 볼 독립적인 상황에 대한 확률이 더욱 크다.
-
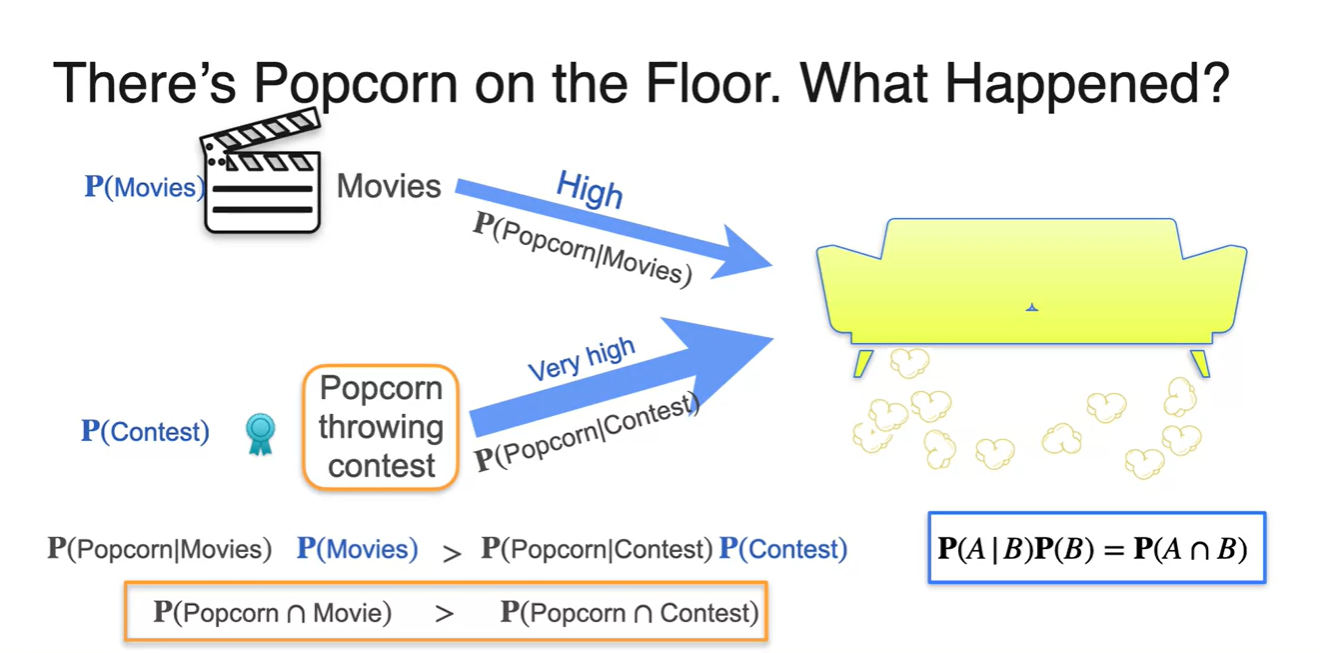
이럴때 우리는 각 확률의 값을 아래와 같이 비교해볼 수 있다.

-
위 수식을 각각에 대해 곱하여 다시 표현하면 아래와 같으며, 이 때 conditional 분포의 대소관계가 역전된다.
Bayesian Statistics - Frequentist vs. Bayesian
-
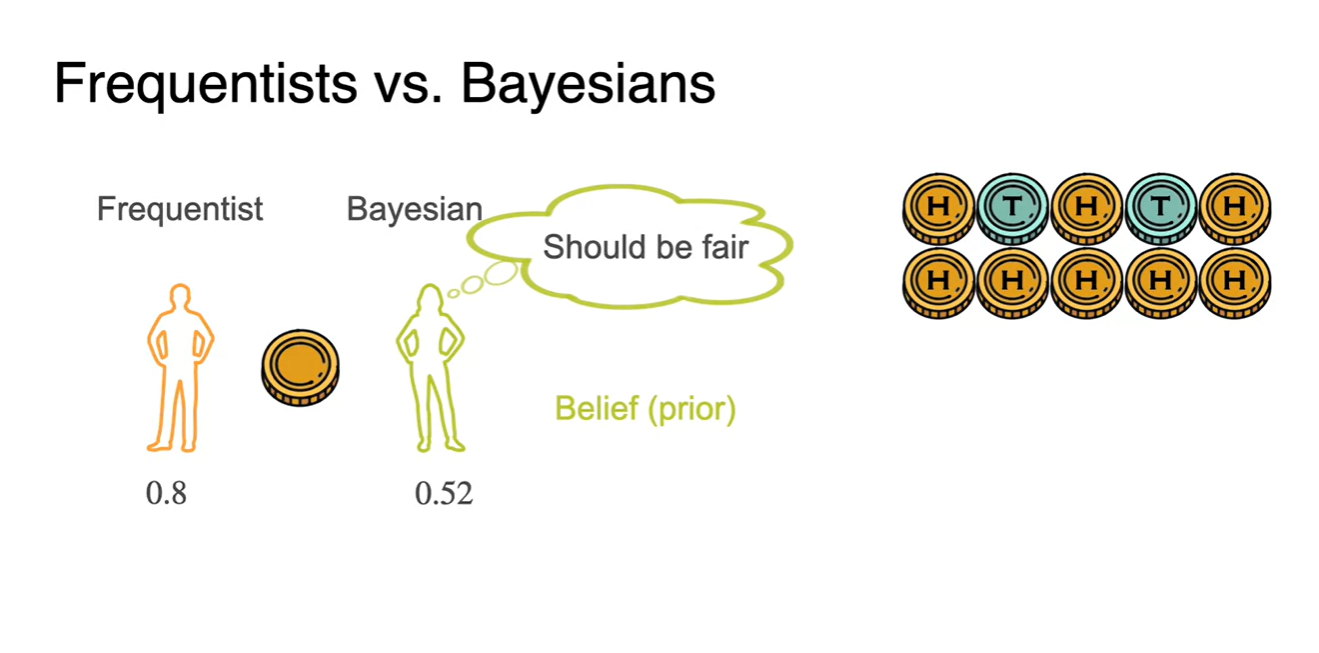
Frequentist는 아래와 같이 Head가 8개, Tail이 2개가 나온 상황의 빈도수만을 보고 확률을 정의한다.
- 그에 반해 Bayesian들은 두 확률이 같다는 가정 즉, 사전 확률(prior probability)이 존재하며 이를 Belief로 바라본다.
-
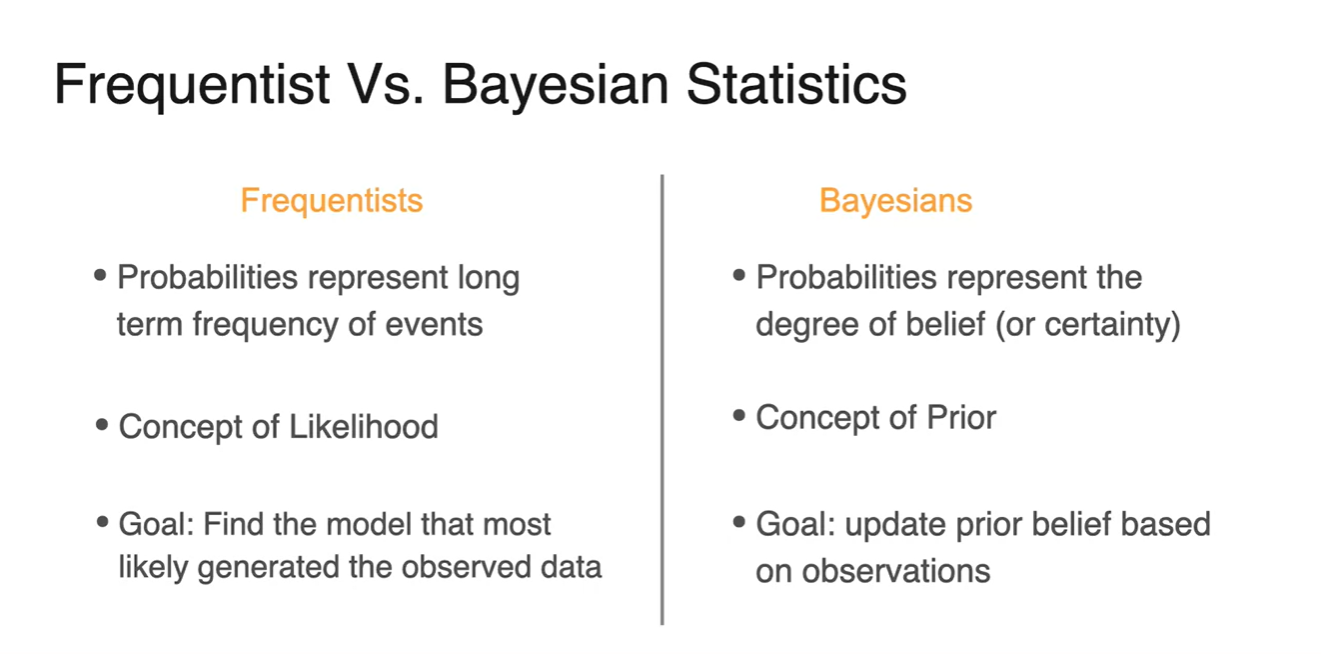
Frequentist와 Bayesian statistics의 차이다.
-
Frequentists는 사건의 빈도수를 통해 likelihood를 정의하고, 관찰된 데이터를 통해 most generating 할 수 있는 model을 찾는다.
-
Bayesians는 prior 확률에 대한 belief를 갖고, 이러한 가정을 update하는 것에 목적을 둔다.
-
Bayesian Statistics - MAP
-
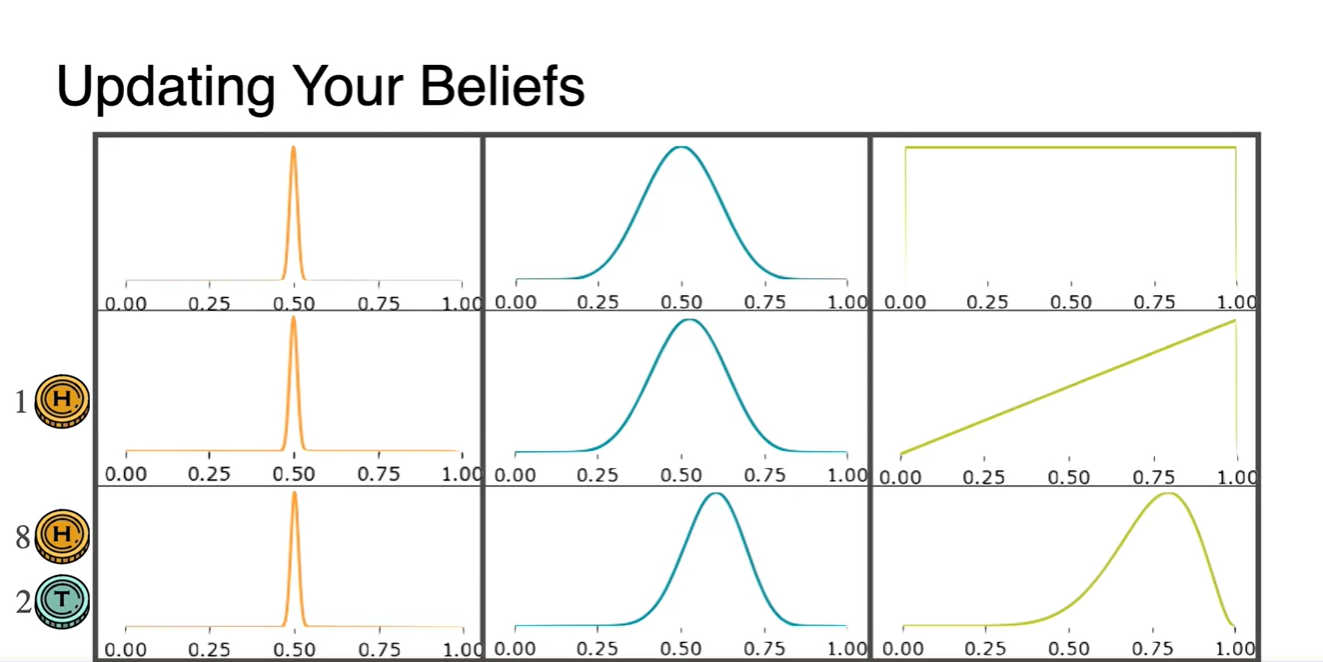
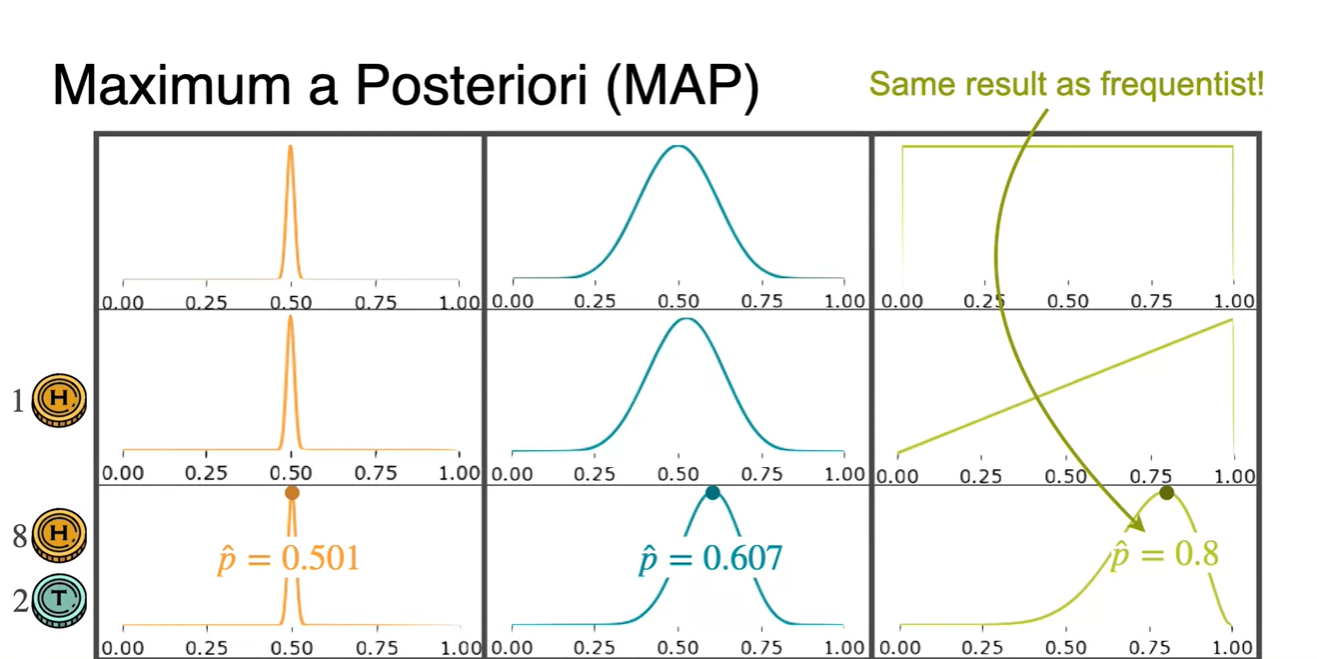
다음 세 가지 경우의 사전 확률 분포를 Beliefs로 가정해보자.
- Direc delta distribution
- Normal distribution
- Uniform distribution
- H 1번과 {H 8, T 2}의 observaion으로 해당 분포를 update한 결과, 분포 1은 변화가 거의 없으나 분포 2와 3의 확률 밀도는 살짝 치우쳤음을 알 수 있다.
-
Maximum a Posteriori(MAP)는 beliefs를 update한다는 점이 큰 특징이다.
- 이는 확률을 최대화하는 parameter를 찾는 방법 중에 하나로, Posterior(사후 확률)를 update하는 과정이 핵심이다.
-
Observation으로 의 확률을 업데이트한 결과 0.5, 0.6, 0.8로 업데이트 되었다.
- 처음 uniform distribution이라고 가정했던 분포는 Frequantist가 Maximum likelihood를 통해 예측한 확률값과 일치한다.
Bayesian Statistics - Updating Priors
-
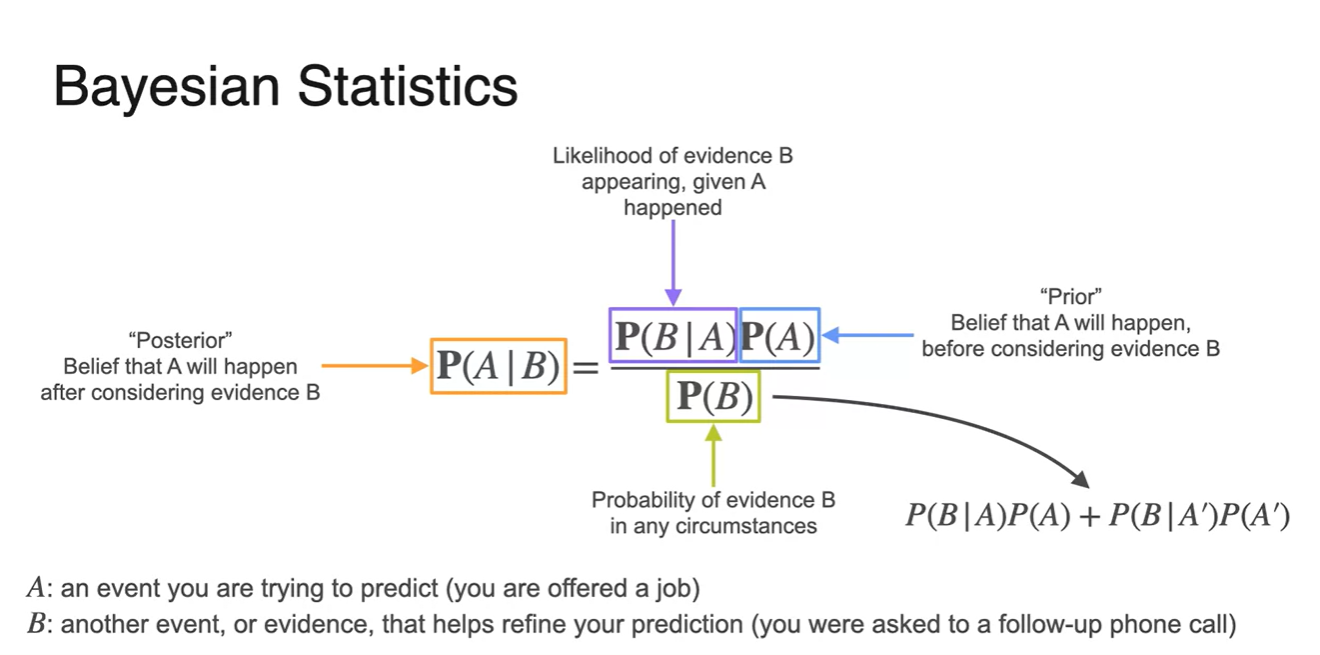
Bayesian 확률은 로 정리된다.
-
는 사건 A가 주어진 상황일 때 evidence B가 나타날 "likelihood"
-
는 predict할 사건 A의 "Prior" 확률
-
는 evidence B를 통해 추측한 A에 대한 belief를 나타내는 "Posterior"
- 는 다.
- 주어진 모든 상황에서 나타나는 evidence B의 확률을 말한다.
-
-
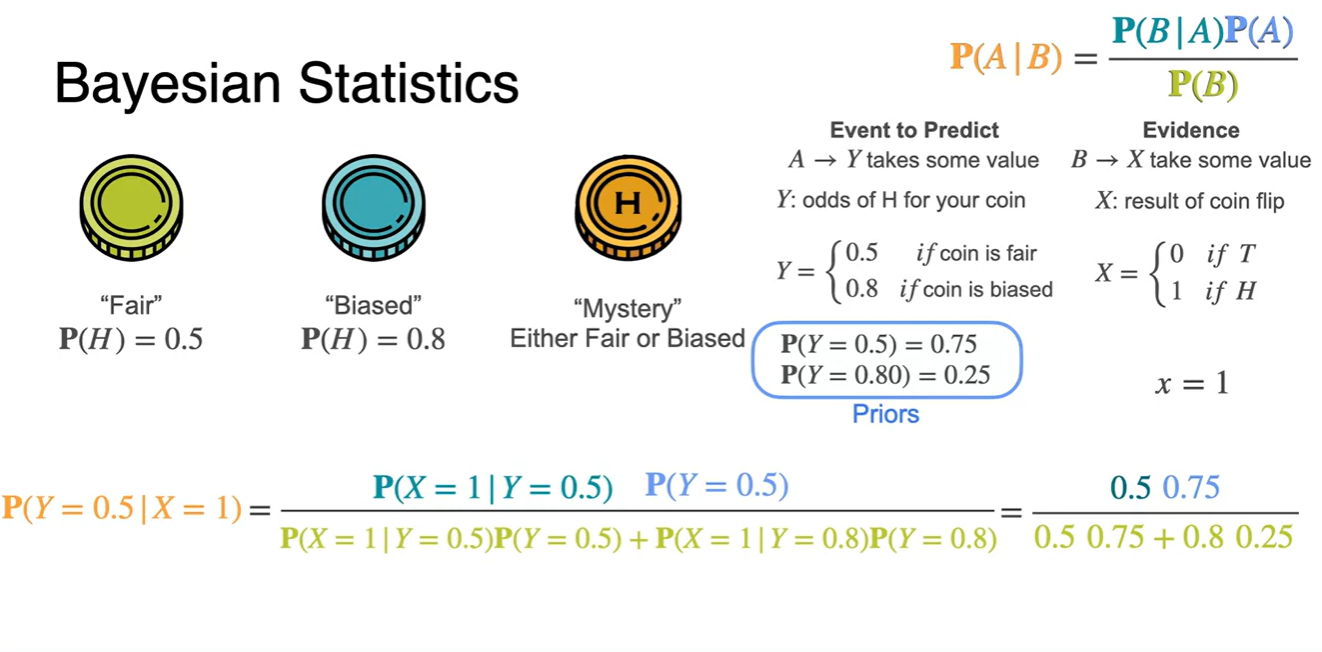
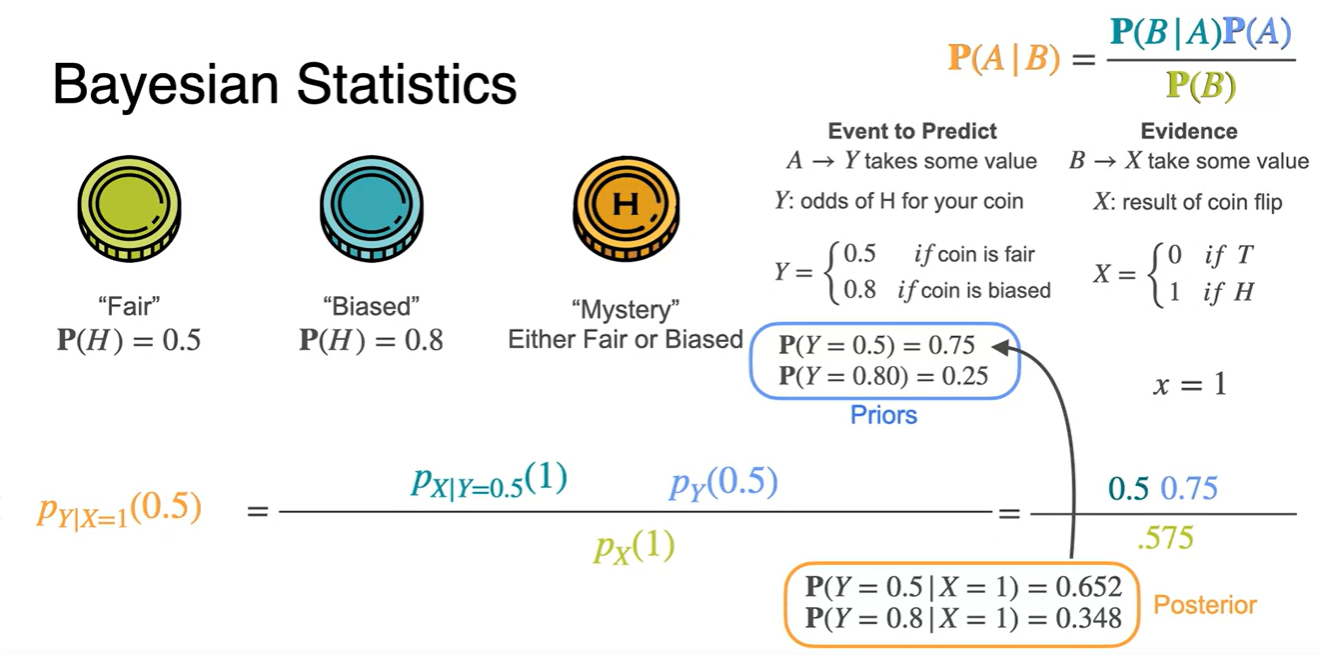
동전 던지기 상황을 예로 들면, Head가 나타날 확률이 Fair하다는 가정과 Biased하다는 가정을 설정할 수 있다.
-
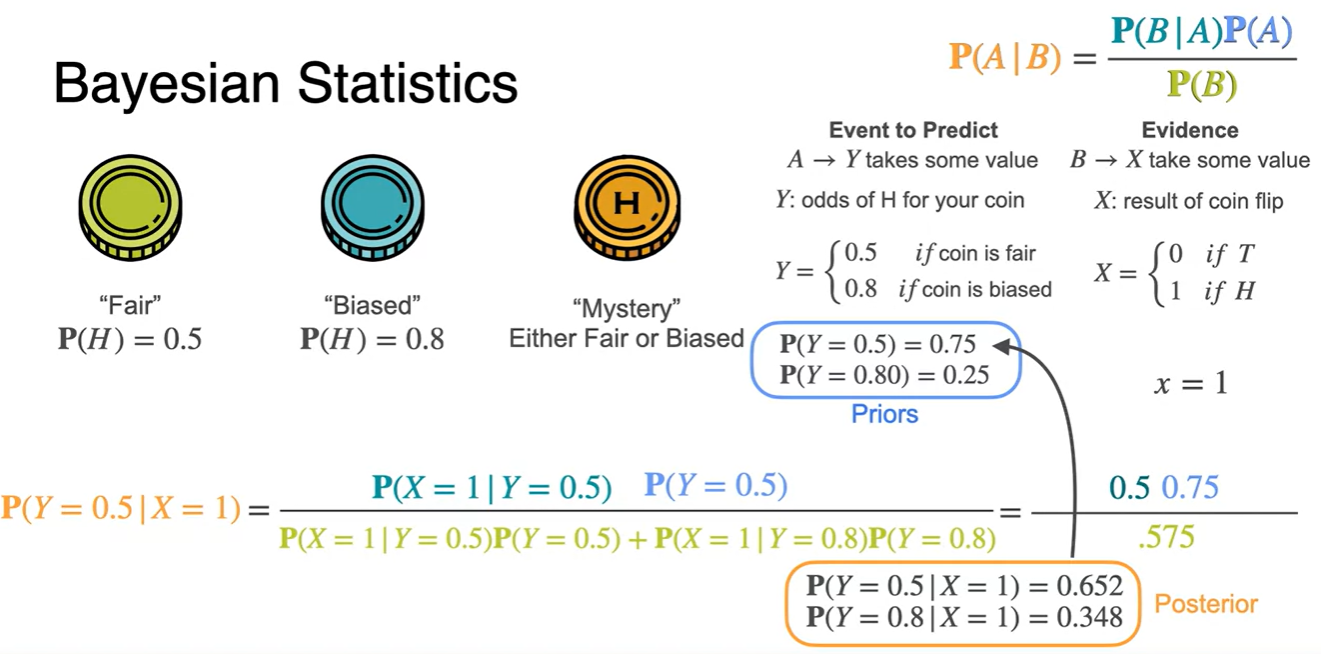
각각의 확률이 0.75, 0.25라는 Priors와 관측치가 로 주어진다면, predict 해야 할 Posteriors는 아래와 같이 계산한다.
-
-
-
과 의 evidence로 posterior를 계산하면 0.65, 0.35 확률값으로 계산된다.
- Posterior 확률이 최대인 값을 찾아 parameter 가 얼마일지 추정하는 방법인 것이다.
-
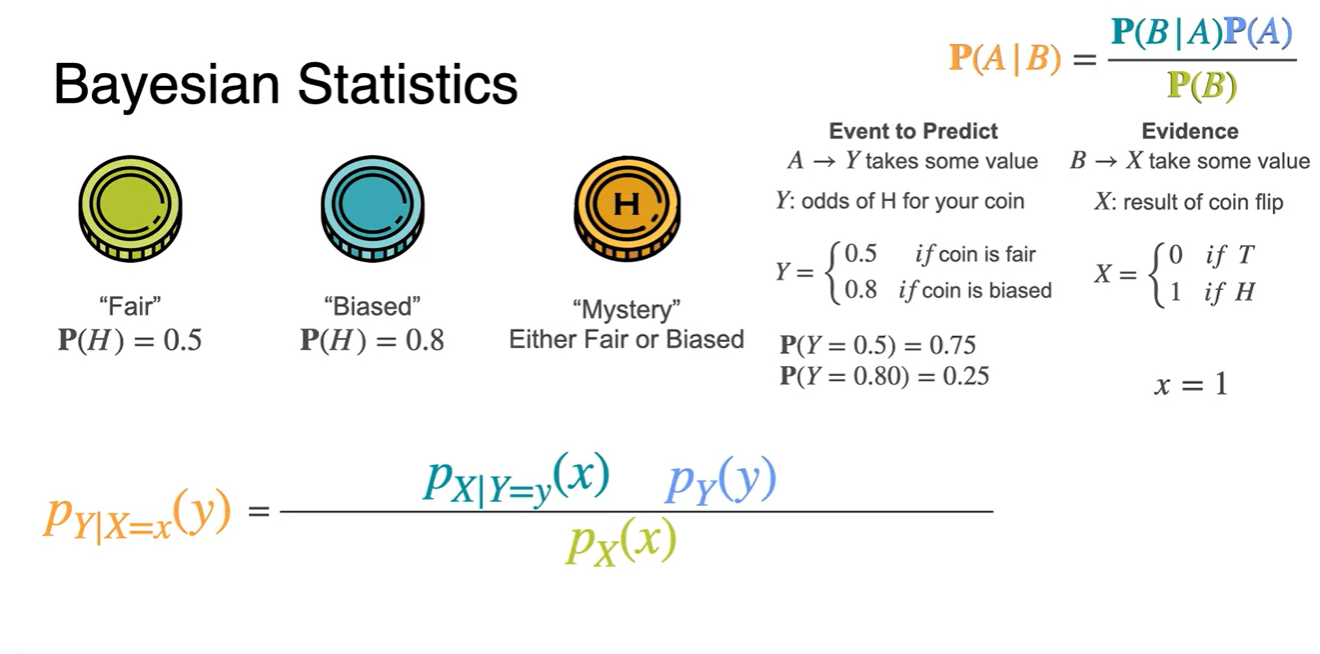
수식을 최대한 단순화하면 아래와 같다.
-
확률 변수 는 evidence, 는 prior belief의 의미를 갖는다.
- 즉, posterior는 가 data로 주어진 상황에서 prior (domain knowledge)를 반영하여 계산한 posterior의 최대를 찾는 것이 목적이다.
-
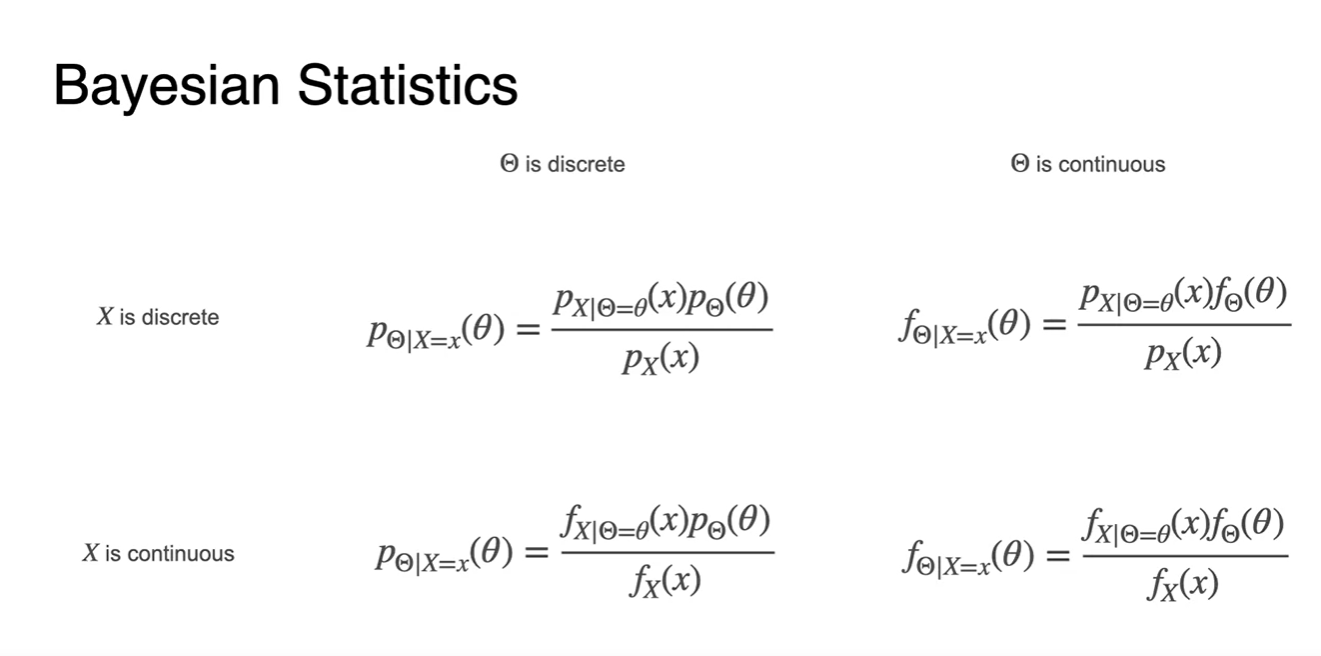
와 가 discrete한 상황과 continuous한 상황의 Bayesian 확률을 정리한 내용이다.
- 중요한 건 Prior 설정과 likelihood와의 곱으로 계산한 Posterior다.
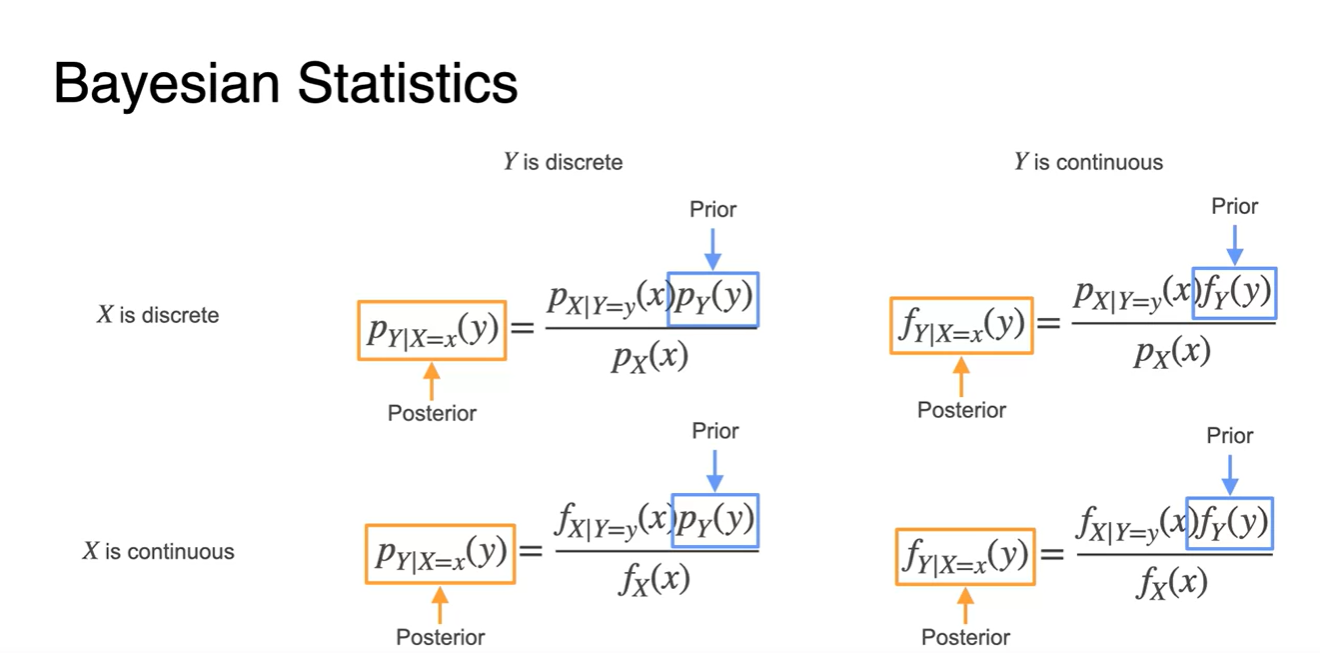
- 이제 추정하고자 하는 parameter와 관련된 변수는 와 로 설정하고자 한다.
Bayesian Statistics - Full Worked Example
-
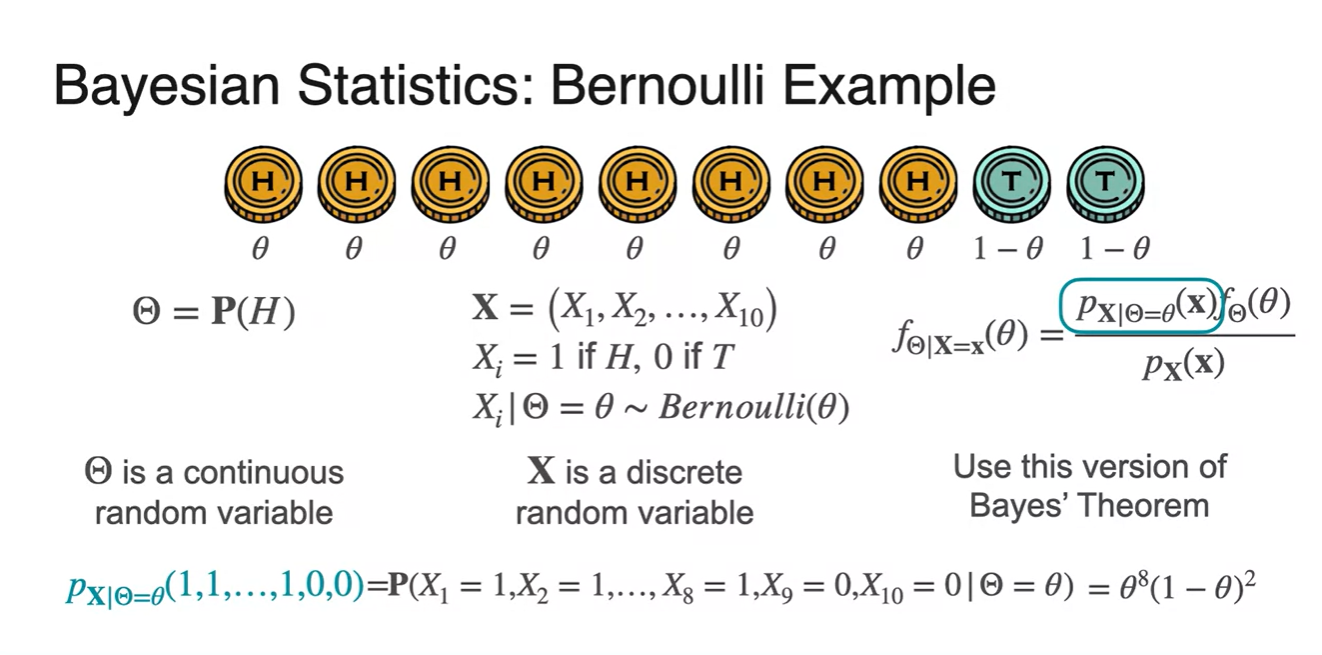
동전을 던져 Head가 나올 확률 를 라고 하자. - continuous random variable
-
는 각 시행 횟수마다 어떤 값이 나왔는지를 의미하는 discrete random variable이다. - 1 if H, 0 if T
-
Bayes' Theorem을 사용하여 정리하면 와 같다.
-
이 때, 가 바로 likelihood이며 parameter 로 해당 식을 표현하면 H가 8개, T이 2개 이므로 다.
-
-
-
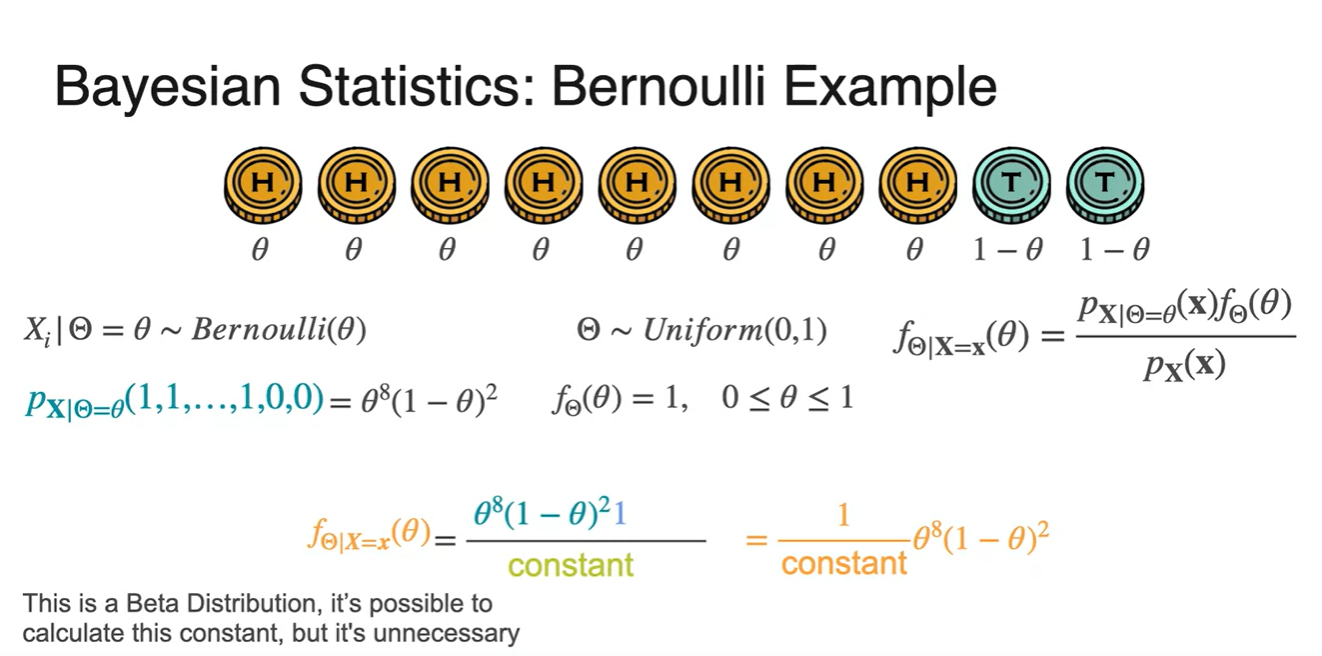
을 따른다고 가정하면 prior 확률을 나타내는 는 1의 값을 가지게 된다.
-
이를 통해 Bayes' Theroem을 다시 정리하면 로 전개된다.
- 이와 같은 꼴을 Beta distribution이라고 하며 constant를 계산할 수는 있지만 unnecessary하다고 설명한다.
-
-
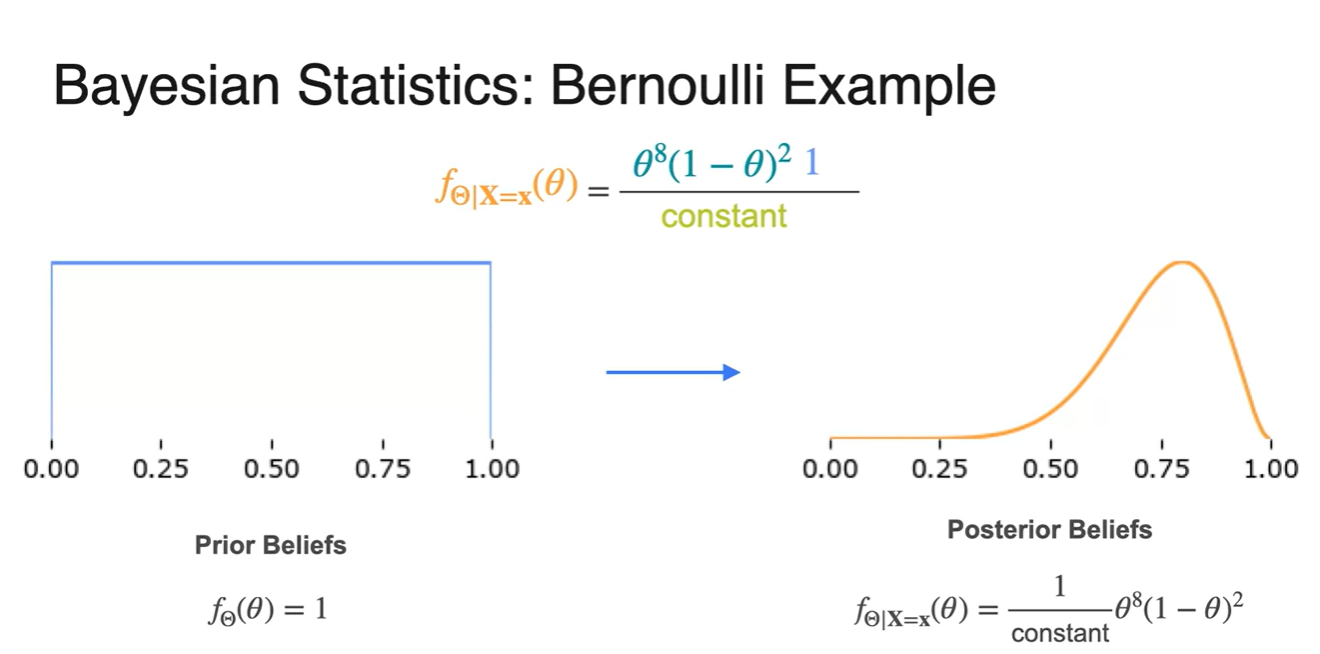
Prior beliefs가 Uniform하다고 가정하여 Posterior를 계산하면, 아래와 같은 분포의 변화가 생긴다.
- 가 0.8에서 최대치를 가짐을 알 수 있다.
-
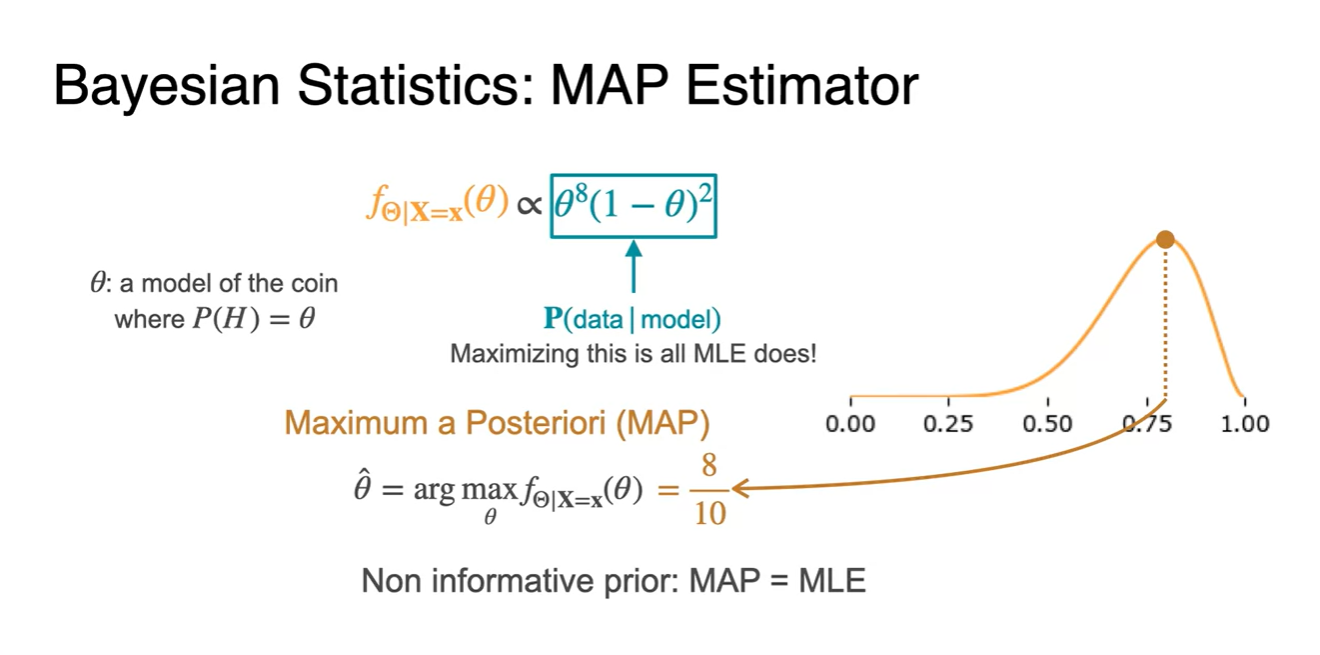
MAP Estimator는 model이 동전의 Head 확률을 라고 가정하는 것으로부터 출발하여, 의 likelihood를 Maximizing하는 parameter 를 찾는 과정을 말한다.
-
Maximum a Posteriori(MAP)에 대한 수식은 로 표기한다.
-
현재 prior를 uniform distribution으로 가정하였기 때문에 에서 likelihood가 최대치를 갖는 상황이다.
-
즉, MAP = MLE라서 prior가 중요한 작용을 하고 있지 않다.
-
-
-
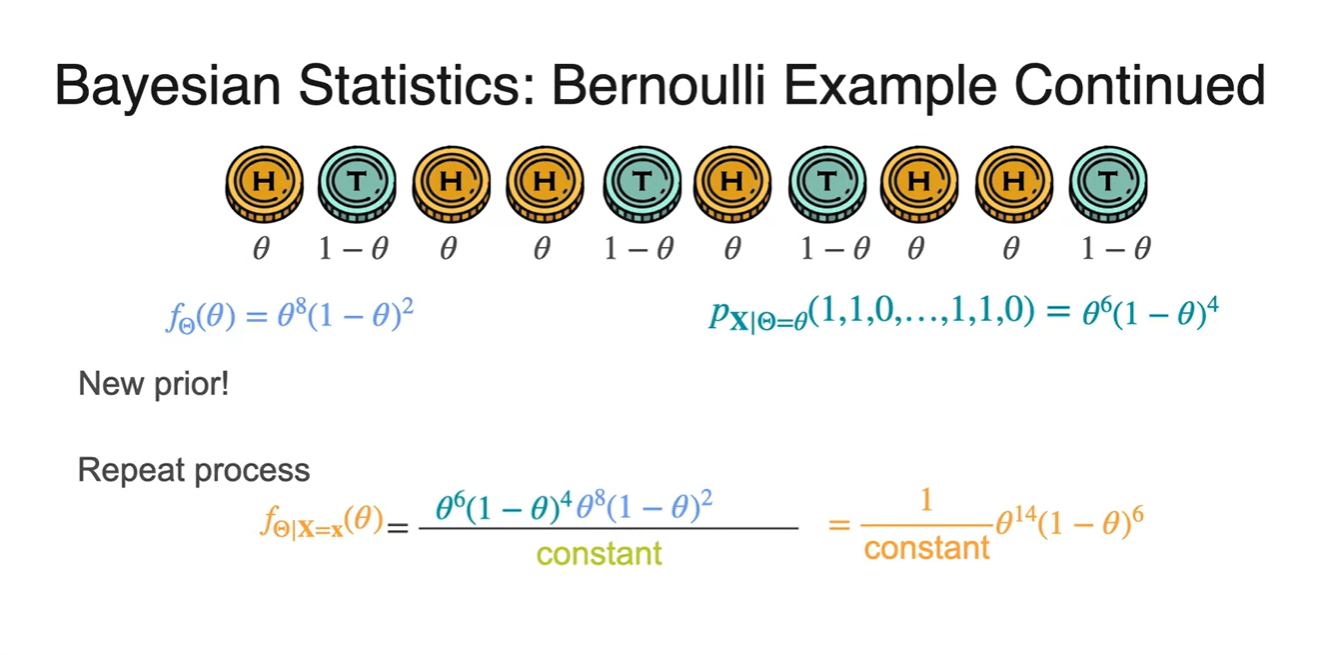
앞서 계산한 posterior를 new prior로 가정하면 로 사용할 수 있다.
- 실제 관측 결과가 라면
new posterior는 로 계산된다.
- 실제 관측 결과가 라면
-
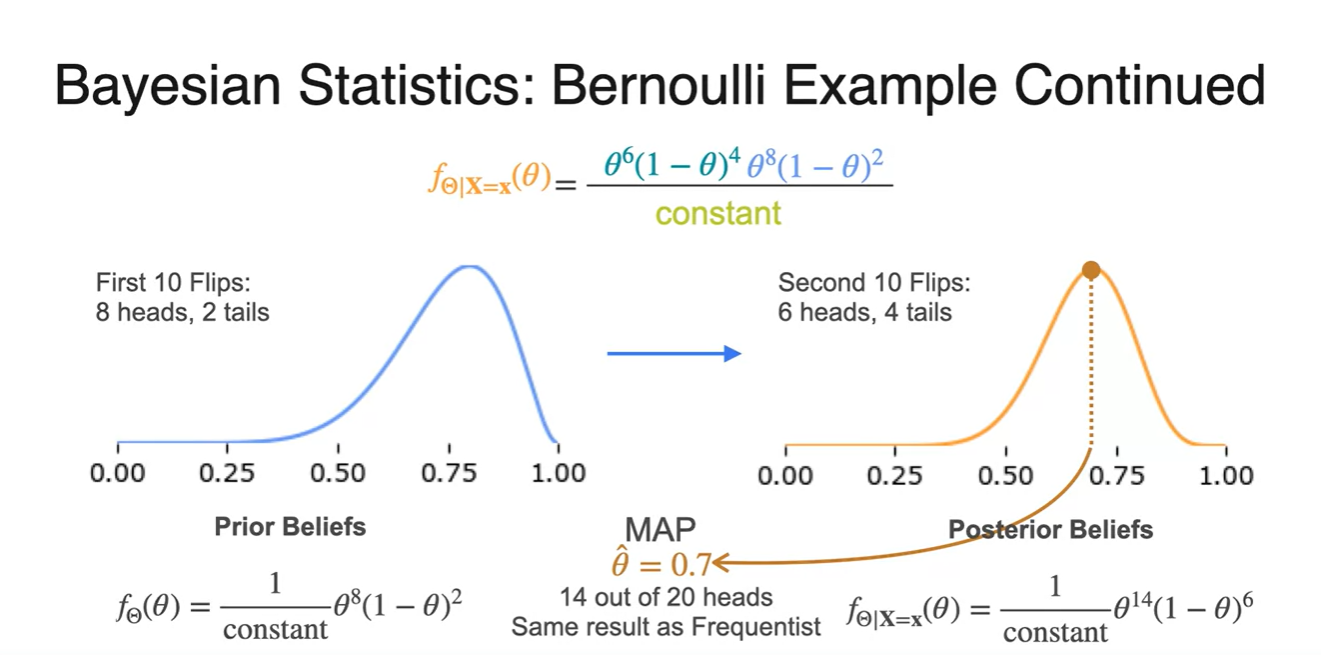
MAP로 posterior를 업데이트 한 결과 maximum likelihood는 에서 만족된다는 것을 알게 되었다.
-
이는 20번 던져서 Head가 14번 나왔을 때 Frequentist가 예측한 maximum likelihood parameter와 같은 결과다.
- 즉, 실제 관측 결과는 6번 Head가 나온 상황이므로 MAP는 prior가 굉장히 중요한 영향을 미치고, frequentist에게는 관측 결과에만 영향을 받는다.
-
-
Bayesian Statistics Summary
- Bayesian들은 prior beliefs를 업데이트 한다.
- MAP with uninformative priors라면(ex. Uniform dist.) MLE와 같다.
- 충분한 데이터가 있다면 MLE와 MAP는 수렴하게 될 것이다.
- 데이터가 적거나 prior belief가 매우 중요한 상황일 때(domain specific) 유용한 방법론이다.
- Prior가 틀린 가정이라면, 결과 또한 틀릴 수 있으므로 주의해야 한다.
Relationship between MAP, MLE and Regularization
-
오른쪽과 같은 Data가 있고, 이를 설명하는 model이 왼쪽의 3개가 있다고 해보자.
- Model이 data를 표현하는 Likelihood 는 Model 3가 가장 크지만, 해당 모델이 사용될 일반적인 확률 은 Model 3가 가장 작다.
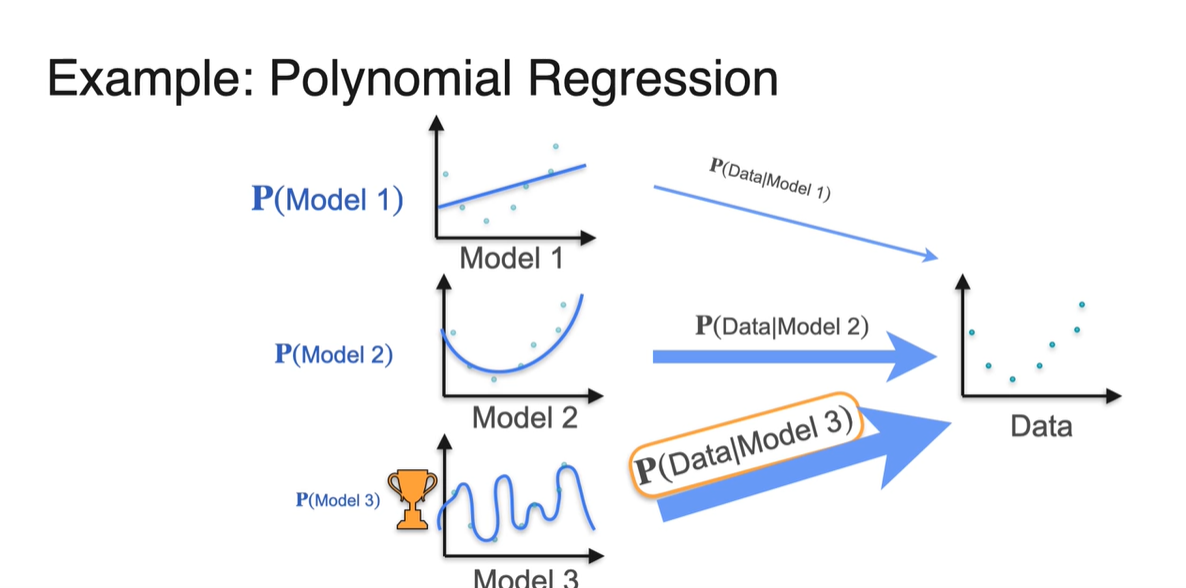
-
그리하여 우리는 두 확률 과 를 곱하여 전체 probability를 계산하였다.
- 결과는 의 확률이 가장 높았음을 알 수 있다.
-
여기에 Model이 Polynomial할 수 있는 경우의 수까지 추가된다면 Regularization으로 panalty를 줄 수 있다고 하였다.
-
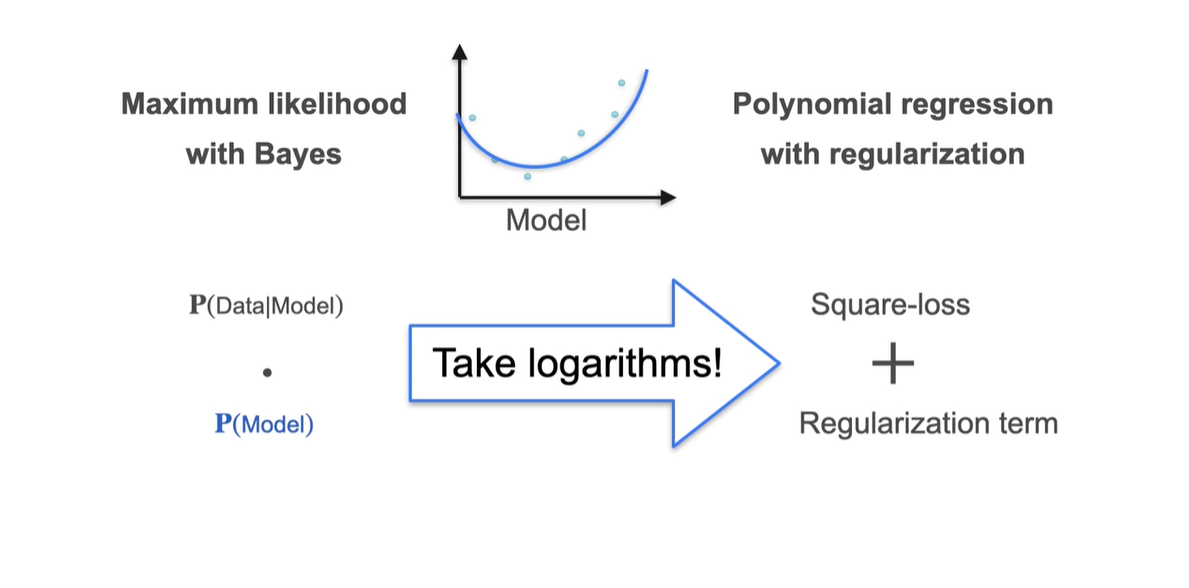
따라서 Bayes 정리를 이용한 Maximum likelihood를 계산하는 방법과 polynomial term(계수)의 L2 regularization을 합치는 과정은 다음과 같이 이루어진다.
-
-
을 어떻게 알아낼 것이냐에 관한 아주 큰(elephant에 비유) 문제를 추후 살펴보자.
-
-
-
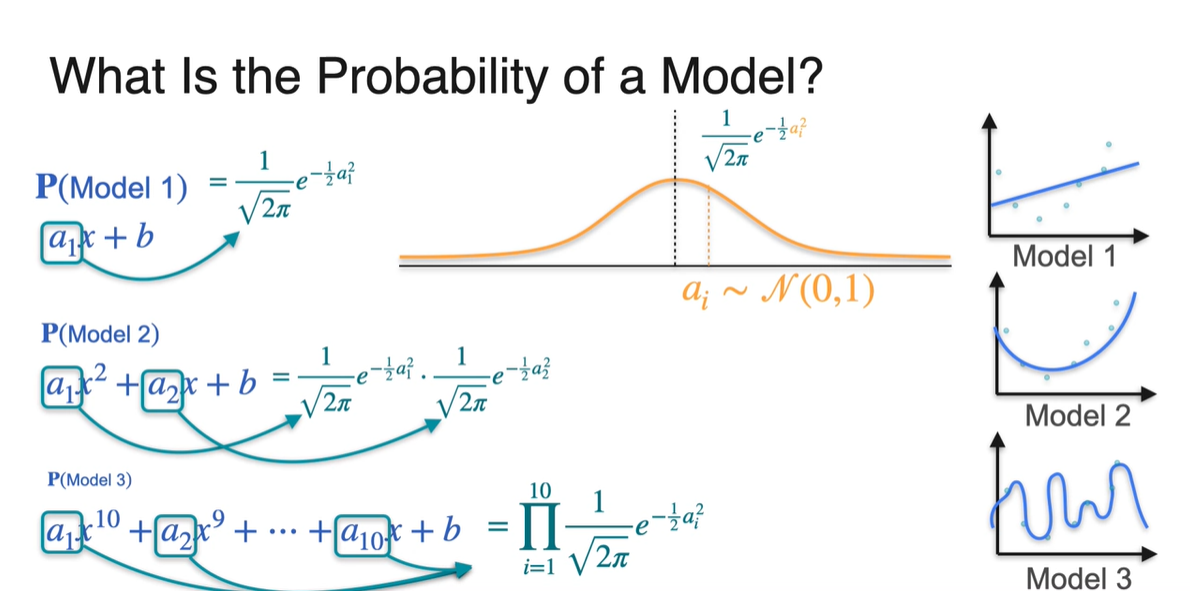
Probability of a Model을 구할 때에는 각 항의 계수가 매우 중요한 역할을 한다.
- 모델의 polynomial항 계수인 가 을 따른다고 생각하면 각 항의 density를 곱한 값은 를 구해 알 수 있다.
-
와 를 곱하면 아래와 같이 exponential의 지수 합으로 표현된다.
- 앞서 보았듯이 를 Maximize하는 과정은 를 Minimize하는 것과 같다.
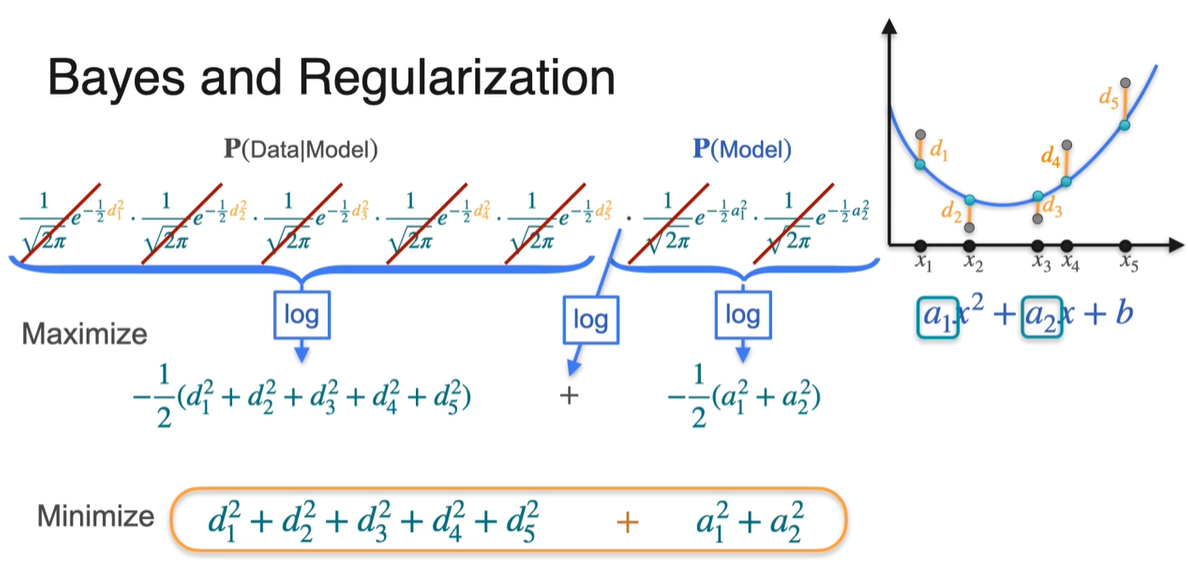
-
따라서 Bayes 정리를 사용하는 MAP는 아래와 같은 Loss term을 사용한다.
-
- 이를 Minimize함으로써 을 최대화하는 parameter를 추정하는 과정이라 할 수 있다.
-