[RL] Fundamentals of Reinforcement Learning Week 3
Value Functions & Bellman Equations
Policies and Value Functions
Specifying Policies
- Policy에 대해 알아보자.
-
이번 강의에서는 각 state에 따른 action을 결정하는 policy distribution에 대해 배운다.
- Stochastic policy와 deterministic policy의 차이를 이해하고 MDP가 주어졌을 때의 유효한 policy는 어떻게 생성하는지 알아보도록 하겠다.
-
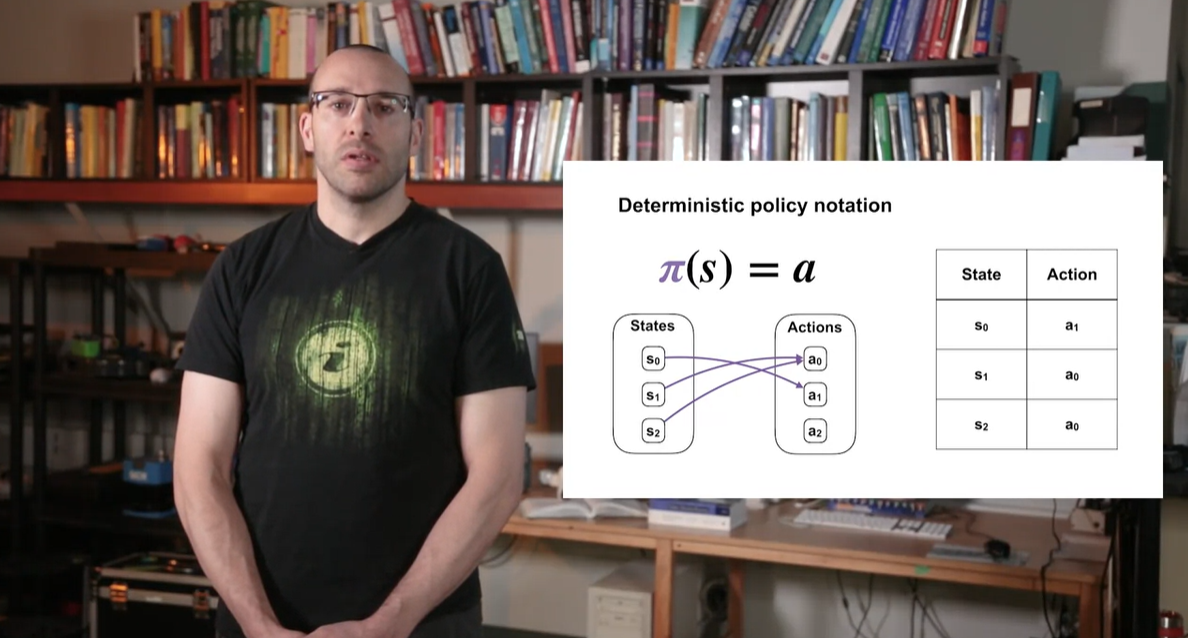
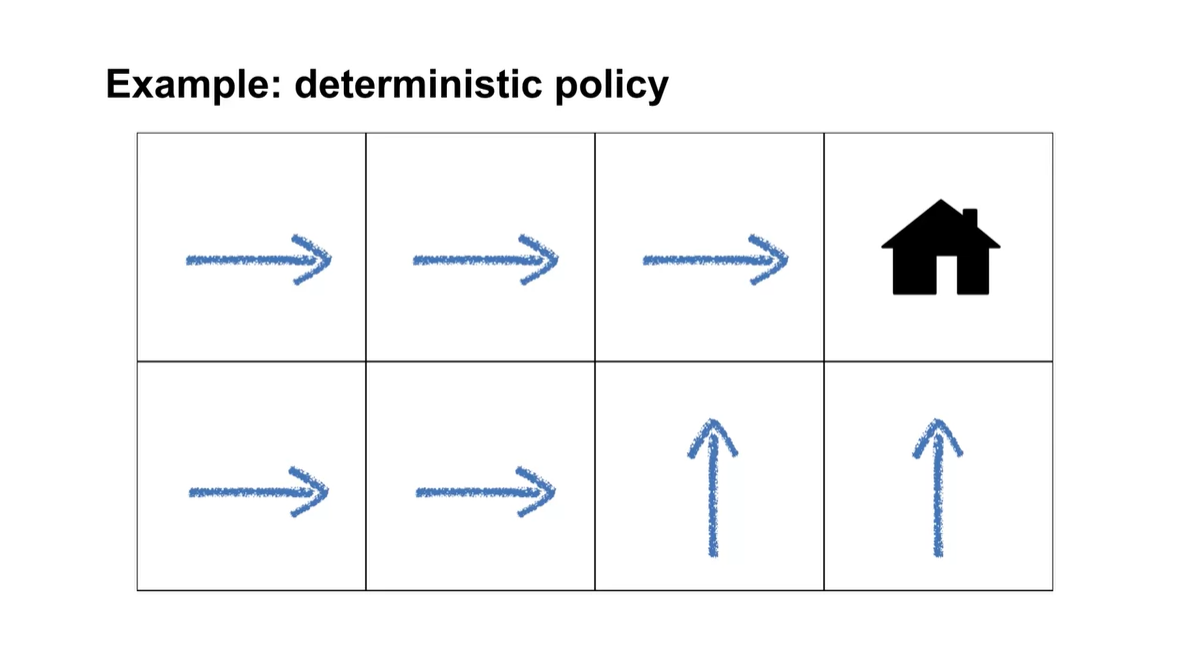
Deterministic policy notaion은 다음과 같다.
-
- 어떠한 state가 주어졌을 때의 action a를 각 state마다 matching하는 것을 말한다.
-
-
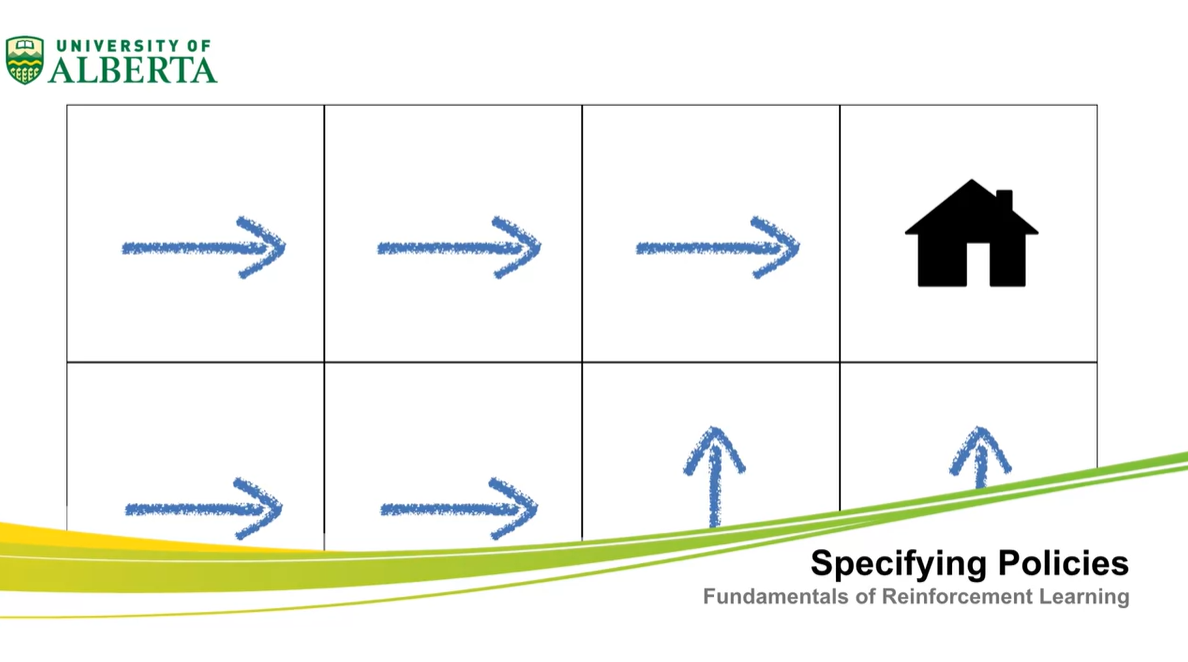
아래에 집을 찾아가기 위한 방향키 조절하는 예시가 나타나져 있다.
- 이와 같은 예시가 deterministic policy 즉, 명확히 결정된 action이 존재하는 경우에 쓰인다.
-
Stochastic policy notation은 로 표기한다.
- 어떠한 state에서의 action random variable이 존재하며, 전체 확률의 합이 1인 상태의 확률 분포가 주어질 때 stochastic한 상황이라 정의한다.
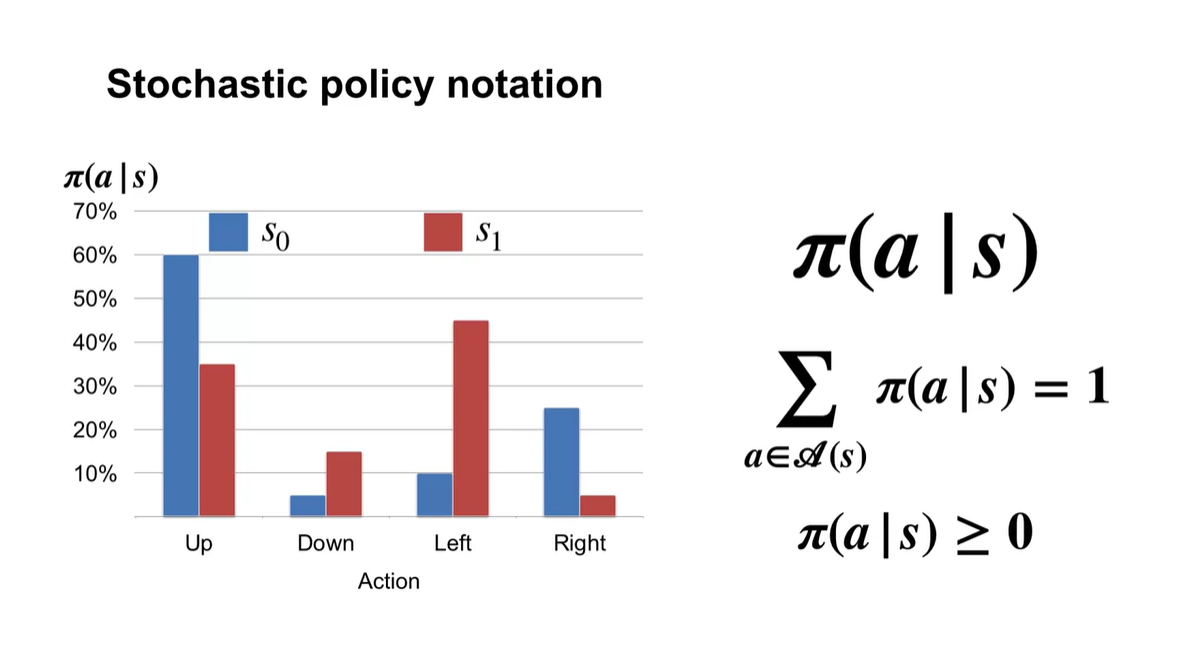
- 따라서 deterministic한 상황과는 다르게 stochastic policy는 action의 선택지가 확률로 표현되어 있는 것을 말한다.
-
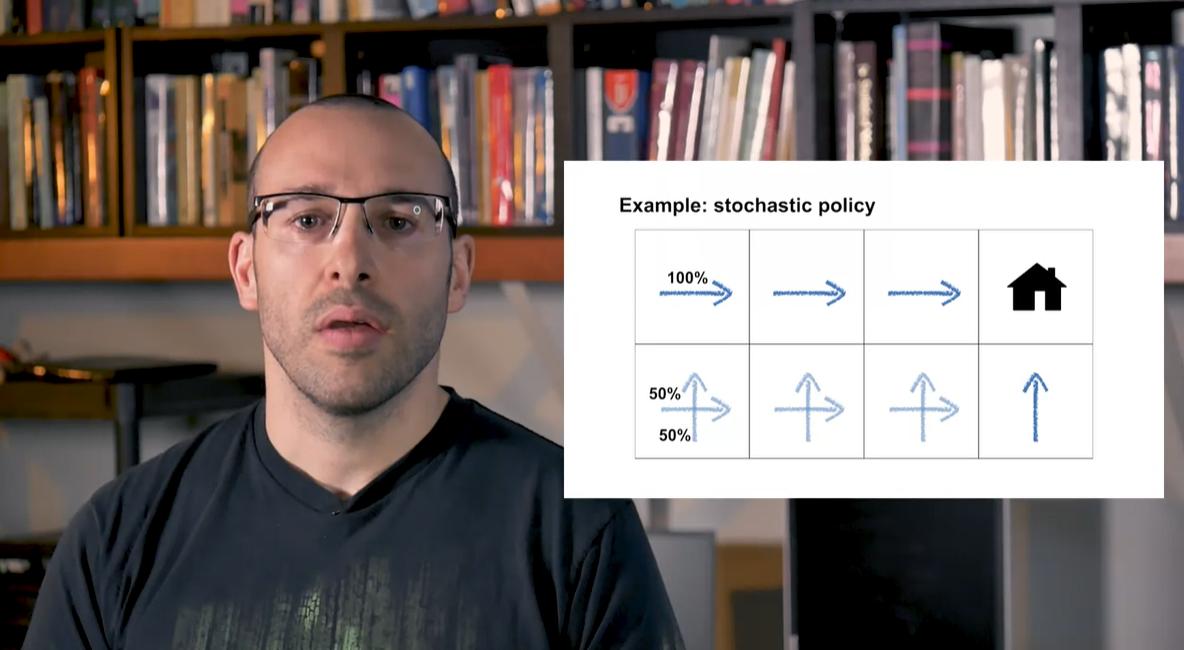
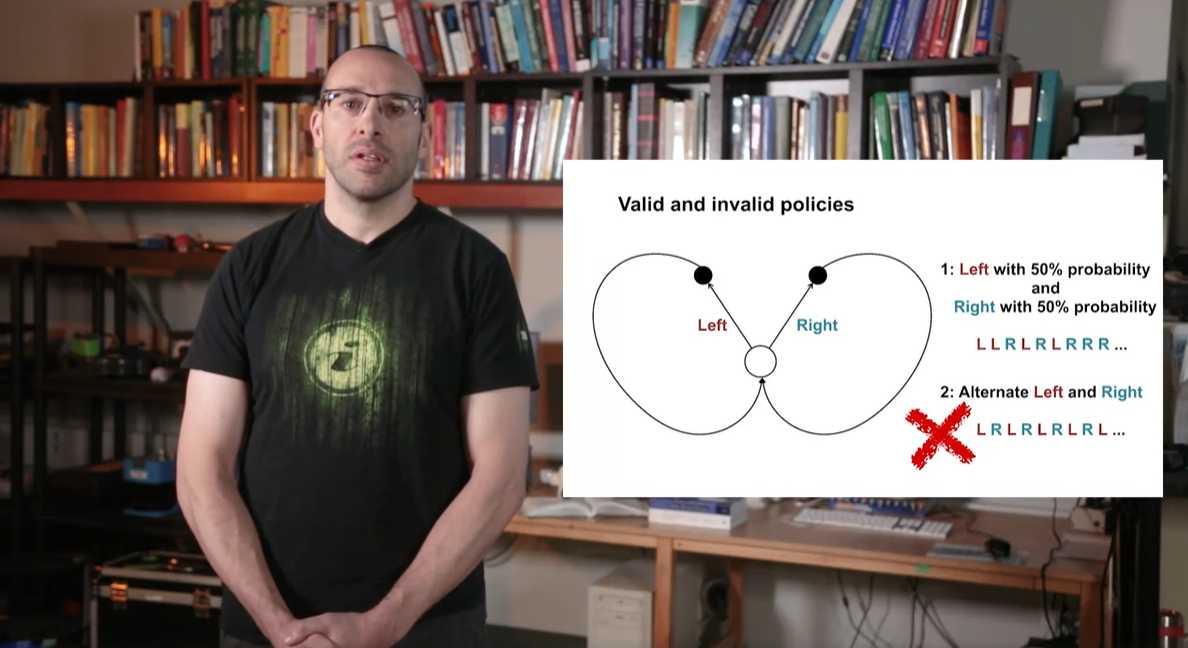
만약 Left와 Right의 선택지가 존재하고 각 probability가 50%의 확률을 가질 때, action을 선택하는 상황은 아래와 같을 수 있다.
- 2번째 예시와 같이 이전 action을 참조하는 조건문(condition)이 사용되어서는 안된다.
-
Summary
- Policy는 오로지 current state에 의존한다.
Value Function
- Value function에 대해 알아보자.

-
이번 강의에서는 state-value function과 action-value function을 정의한다.
- Value function과 policy의 관계를 정의내라고, 유효한 value function을 생성한 예시를 다뤄보도록 하겠다.
-
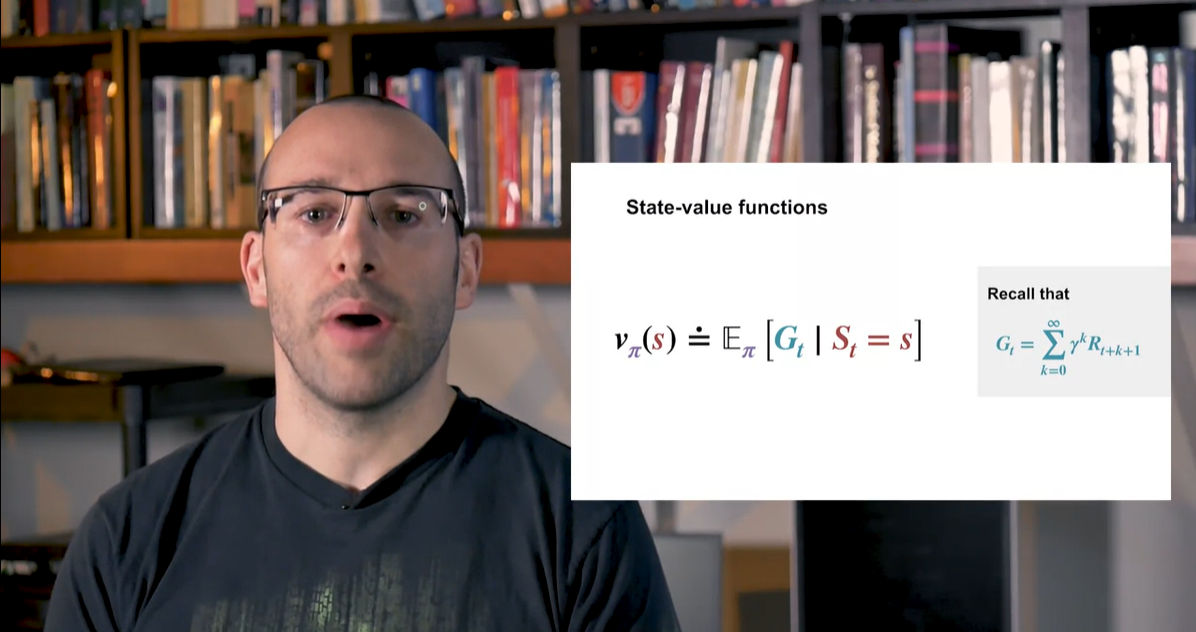
State-value function의 notation은 다음과 같다.
-
- Policy 를 고려한 state 에서의 전체 reward 기댓값을 의미한다.
-
-
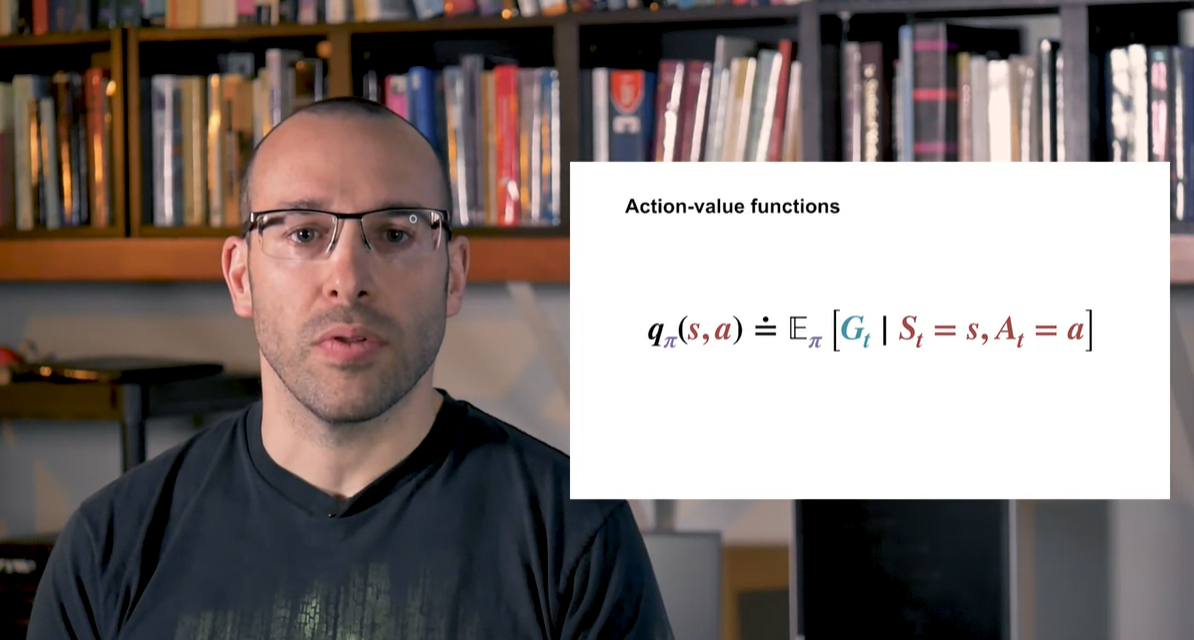
Action-value function의 notation은 다음과 같다.
-
- State 와 취한 Action 가 주어졌을 때의 전체 reward 기댓값을 의미한다.
-
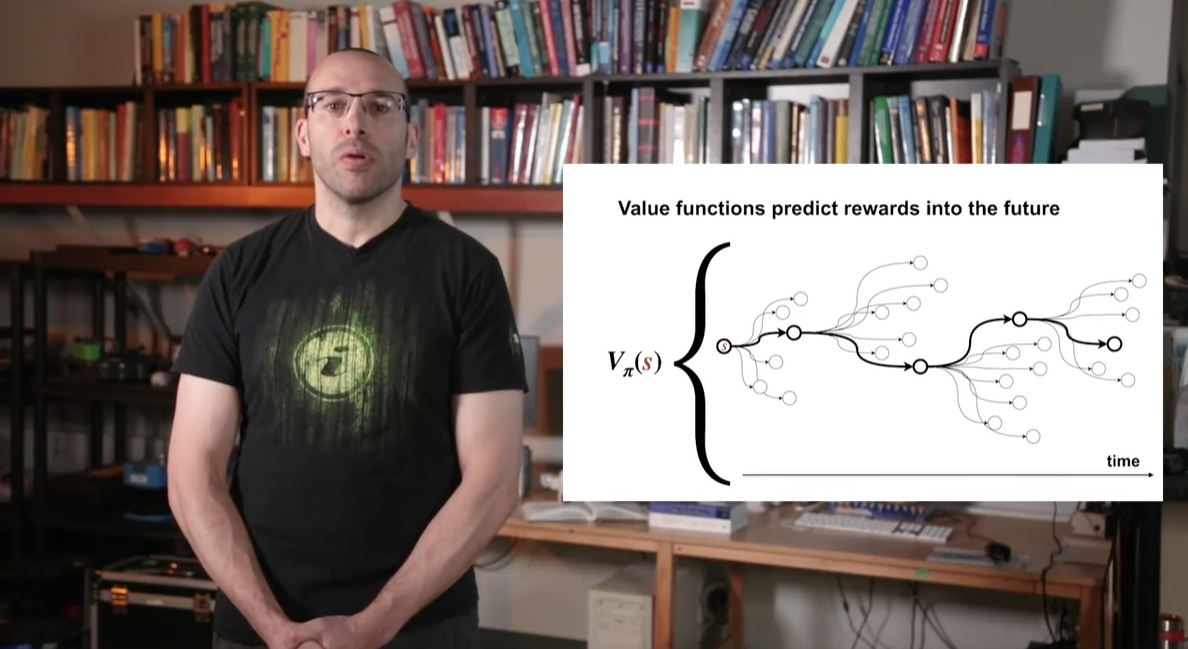
- Value function 는 미래의 모든 경우의 수를 고려한 최적의 solution이라 할 수 있다.
-
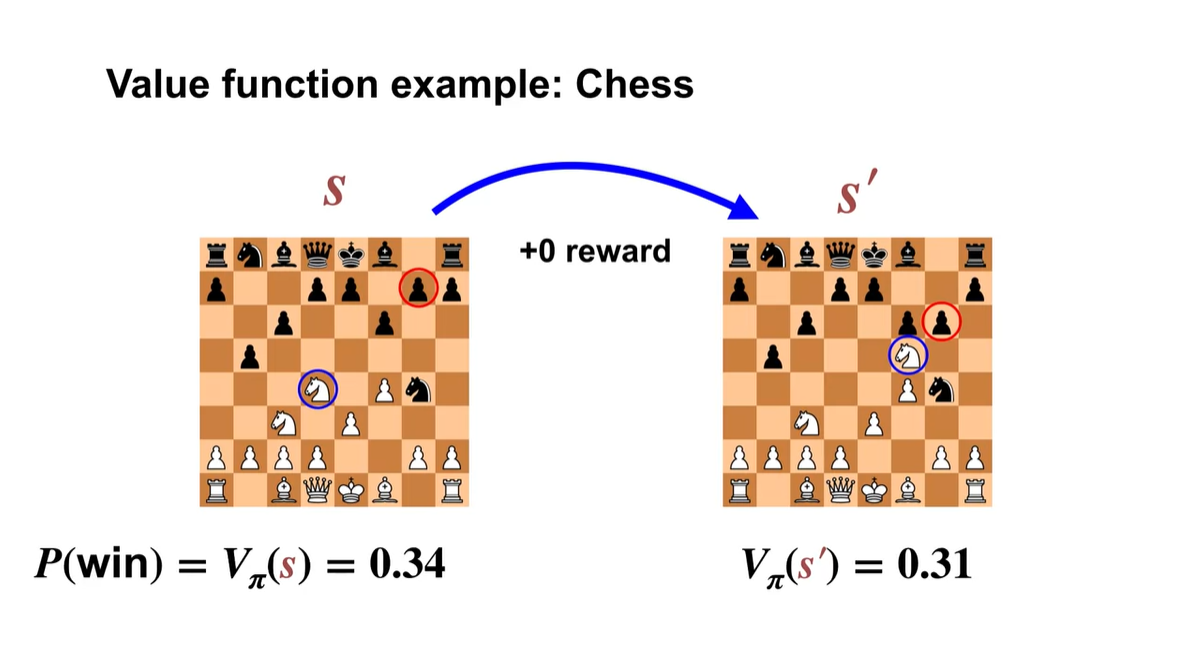
Chess를 두는 상황을 가정해보자.
-
정책 를 따를 경우, 상태 가치는 단순히 이길 확률 이다.
-
처음 로부터 다음 으로 transition될 때, 아무런 reward를 받지 못하여 value 가 감소하였다.
-
남은 게임 동안 정책 를 계속해서 따르게 된다면 게임을 지고 말 것이다.
- 이렇듯 action-value function을 사용하면 각 움직임의 승리 확률을 평가할 수 있다.
-
-
-
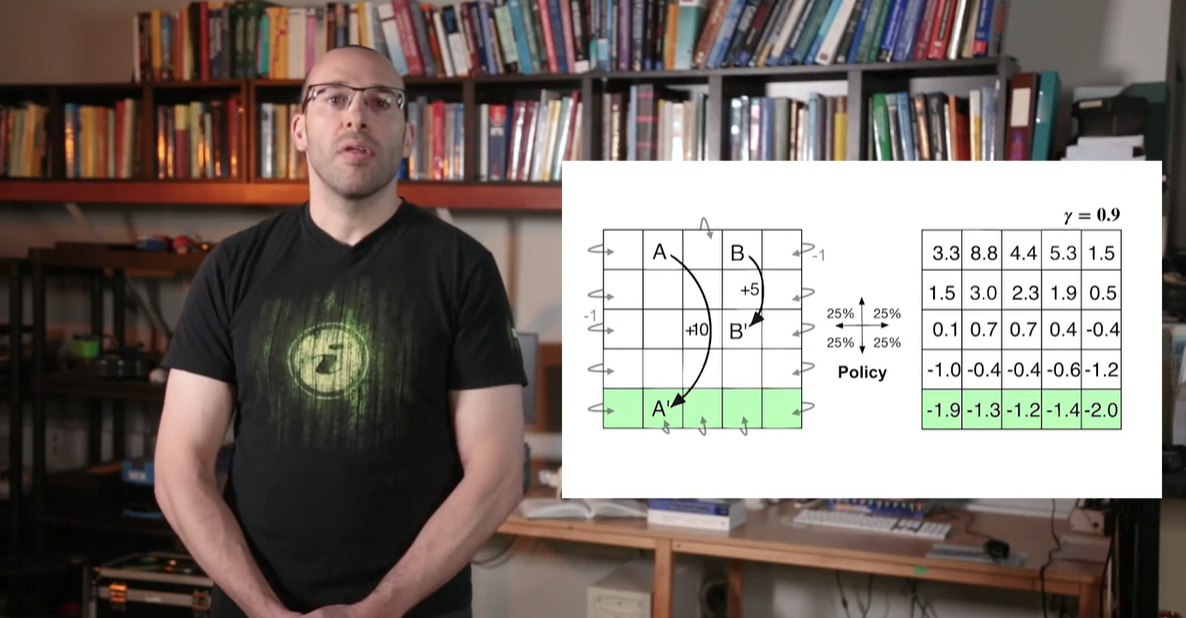
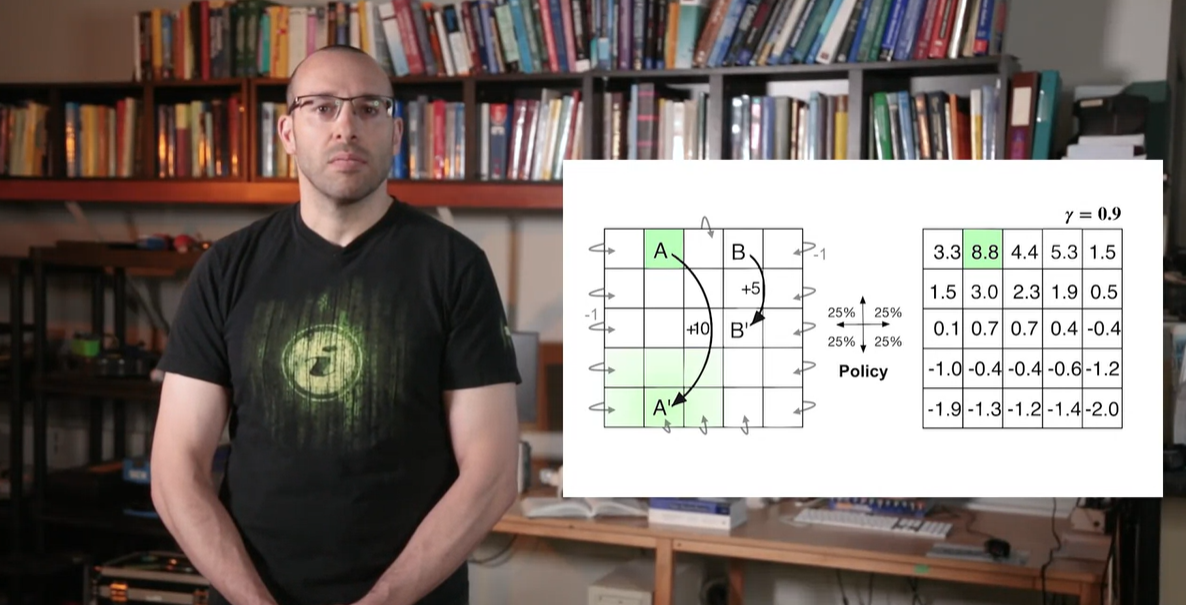
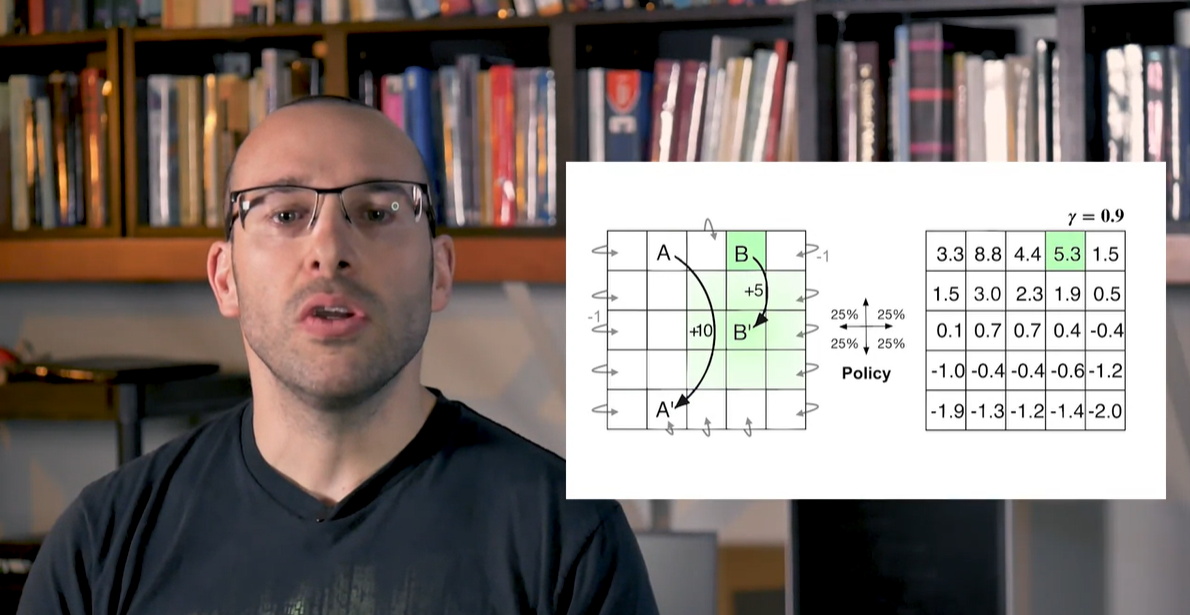
아래와 같은 board판이 있고, 상태 A와 B 그리고 reward가 주어진다고 해보자.
-
A에서 A'로 이어지는 구간 이후, 맨 아래 행의 values를 보면 음수 값을 가진다는 것을 알 수 있다.
- 이는 당장 A'으로 향하는 움직임을 택해 +10의 reward를 얻었음에도, board를 벗어나는 경우의 수로 인한 - reward를 많이 받있기 때문으로 해석할 수 있다.
-
-
반면 시작 지점 A에서의 value는 높은 편이나 reward +10에 비해 작다.
- 그 이유는 board를 벗어나는 경우의 수로 인한 감쇠 효과 때문이라고 볼 수 있다.
-
그러나 B 지점에서의 value는 reward +5보다 높은 값을 가질 수 있다.
- 이는 transition B'의 위치가 board의 중앙을 향해 매우 안전한 value를 유지할 수 있기 때문이라고 해석할 수 있다.
-
Summary
- State-value function은 특정 policy를 따르는 state로부터 얻을 수 있는 reward의 전체 기댓값이다.
- Action-value function은 특정 policy를 따르는 특정 action을 취했을 때의 state로부터 얻을 수 있는 reward의 전체 기댓값이다.
Bellman Equations
Bellman Equation Derivation
- Bellman Equation을 유도해보자.
- 이번 강의에서는 state-value function과 action-value function에서의 bellman equantion을 유도해보고, 현재와 미래 가치와의 관련성을 알아볼 예정이다.
-
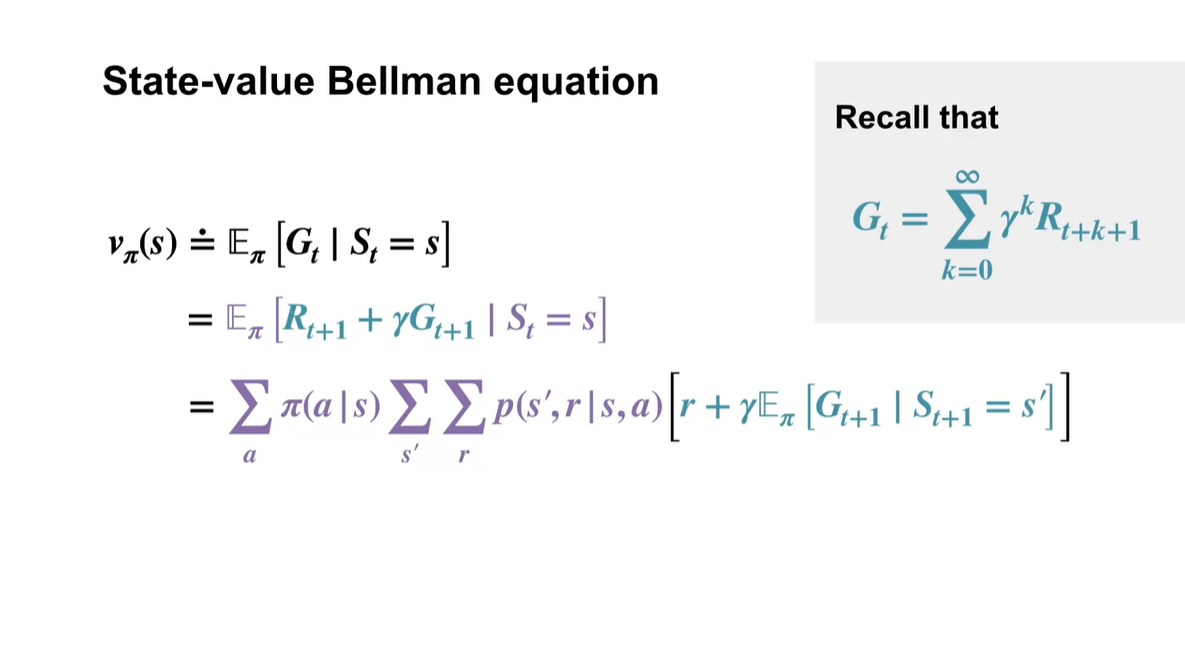
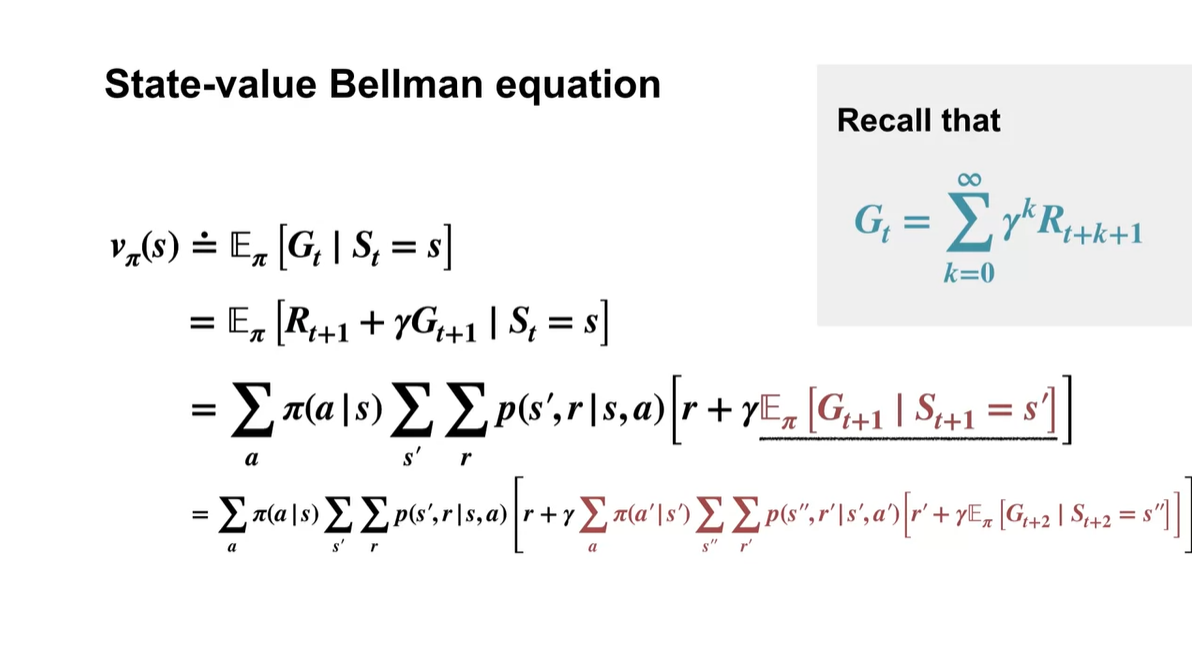
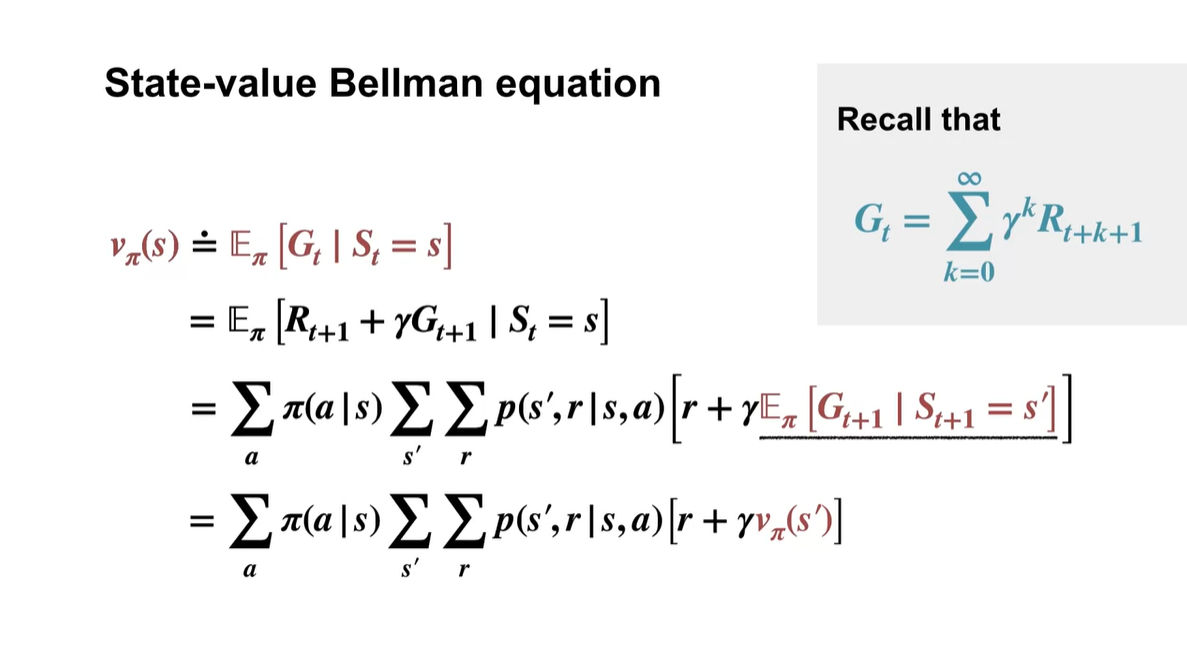
State-value function은 로 정의했다.
-
는 현재 reward 과 의 합으로 분해되며 전체 expectation을 전개하면 다음과 같다.
-
- 는 Markov Process probablity를 나타낸다.
-
-
-
는 그 다음 state인 에서 기대할 수 있는 미래 가치()를 의미한다.
-
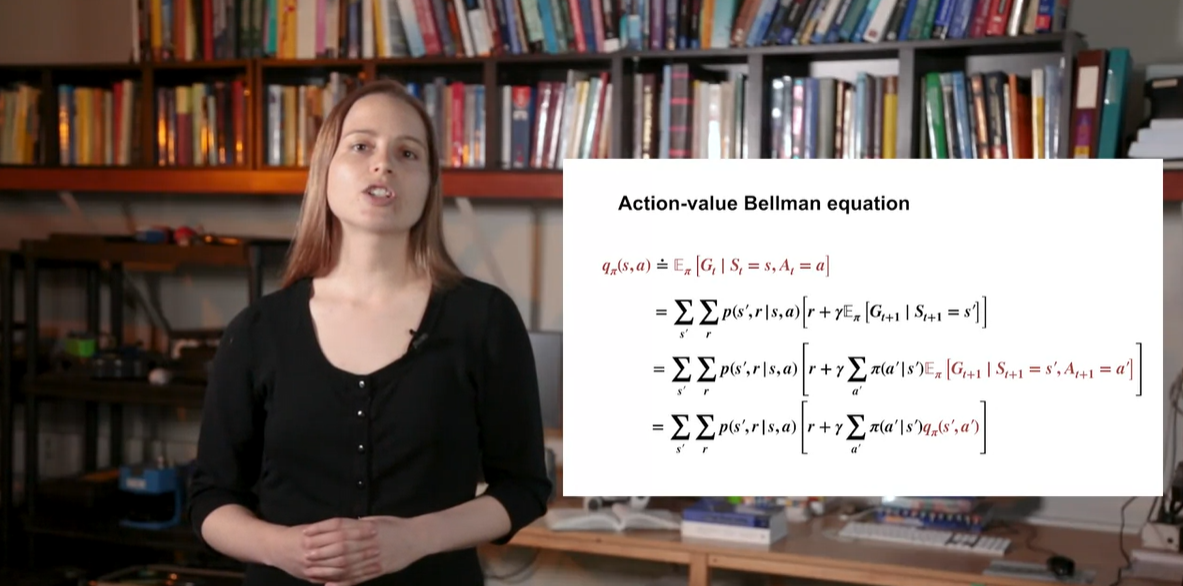
Action-value function은 로 전개됐었다.
-
이는 로 전개된다.
-
이 때 는 action distribution(policy) 와 value 곱으로 전개할 수 있다.
- 는 다시 이다.
-
-
-
Summary
- Current time step에서의 state/action values는 미래 가치의 reculsive한 결과를 내포한다는 것을 알 수 있다.
Why Bellman Equations?
- Bellman Equation이 왜 쓰이는 걸까?
- 이번 강의에서는 bellman equation을 사용하여 실제 computing하는 과정에 대해 알아볼 것이다.

-
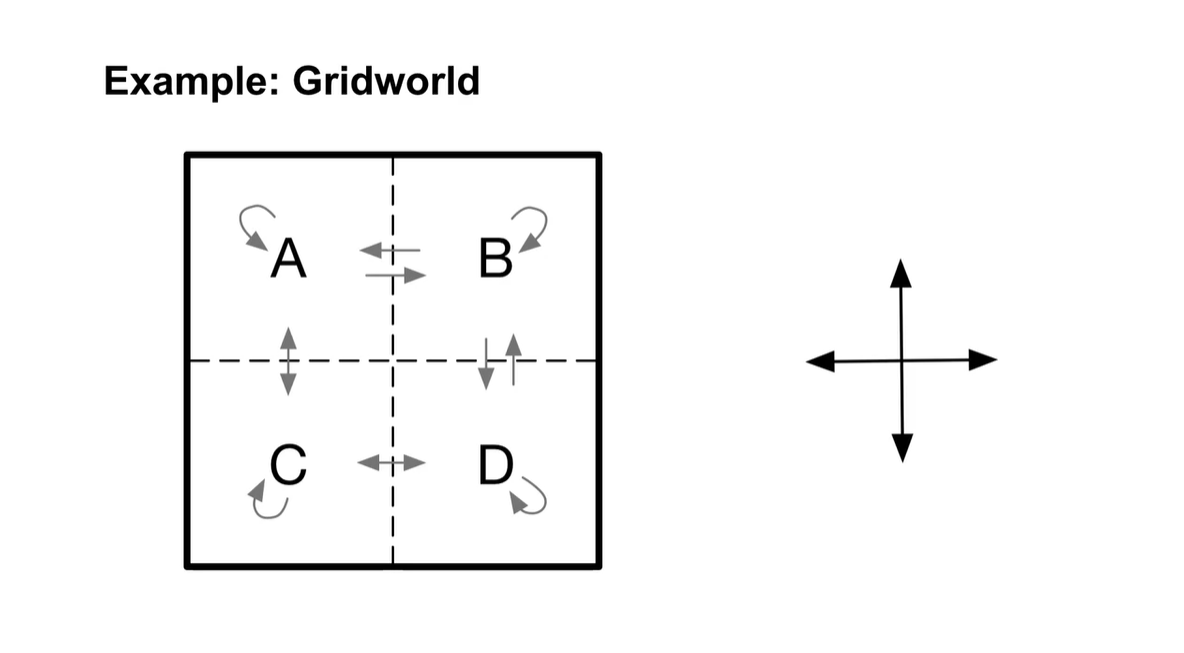
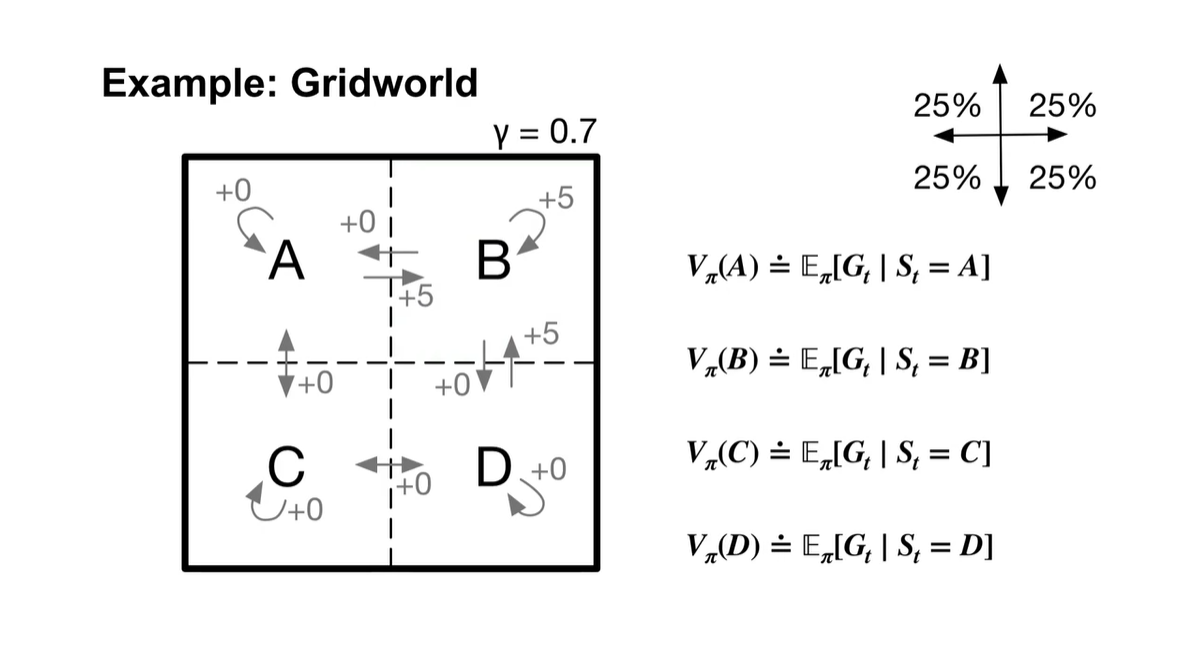
아래와 같은 Grid 판에 state가 A, B, C, D로 주어지고, 각 state에서의 전이 확률이 고려된 경우의 수가 화살표로 그려졌다고 하자.
- Action을 취할 수 있는 경우의 수는 동서남북 네 가지가 가능하다.
-
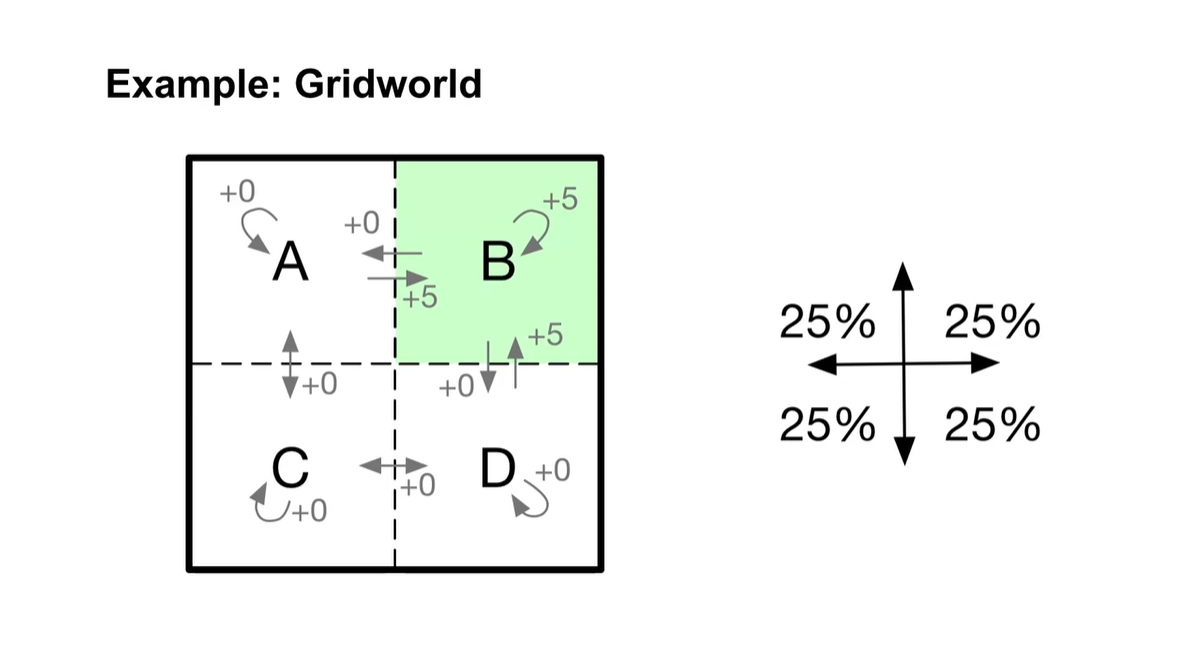
다른 state에서는 보상이 없지만 B state에서의 보상이 +5로 주어지는 환경(environment)이라고 가정하자.
- 취할 수 있는 action은 네 가지이며 각 확률은 동일하게 1/4이다.
-
는 0.7로 설정하고, state-value function은 각 state마다 구한다.
- S가 A일 때, B일 때, C일 때, D일 때 모두의 미래 가치를 계산할 것이다.
-
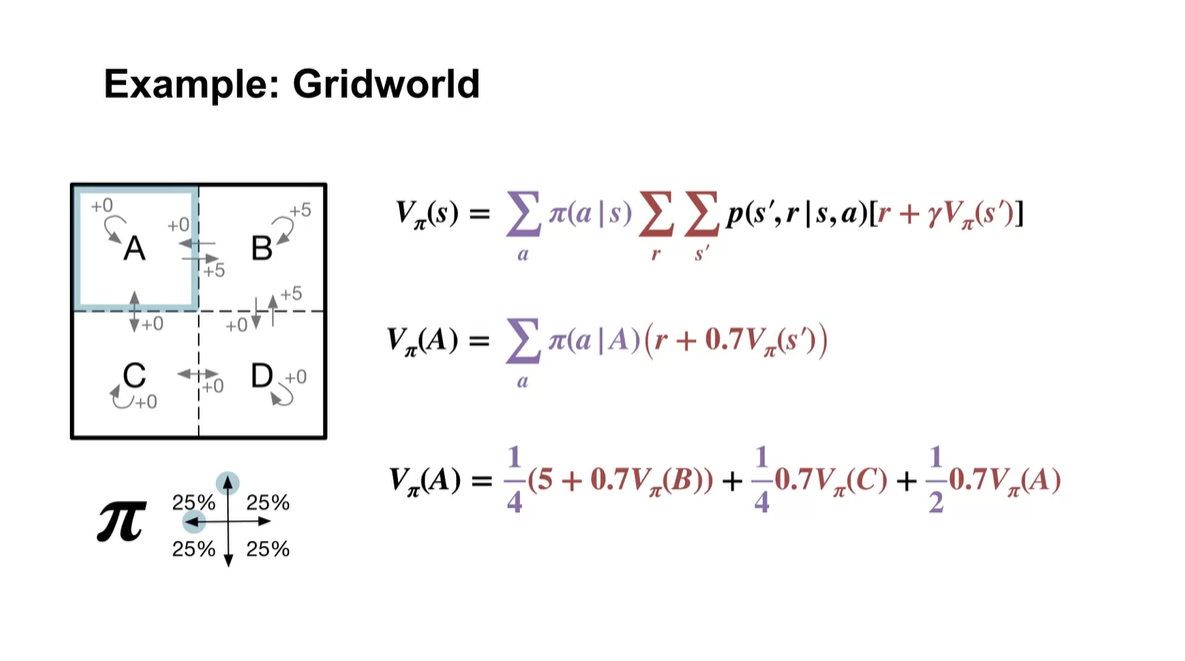
State A에서 시작한 는 를 계산하면 된다.
-
A에서 B로가는 state, A에서 C로 가는 state, A에서 A로 가는 state가 전체 경우의 수라는 사실은 Markov Process probaility를 고려하여 얻어진다.
- 따라서 policy(action distribution probability)인 1/4과 각 전이 상태에서의 value의 평균치를 계산한다.
-
- 이렇게 모든 state에서의 value를 구하면 다음과 같이 전개된다.
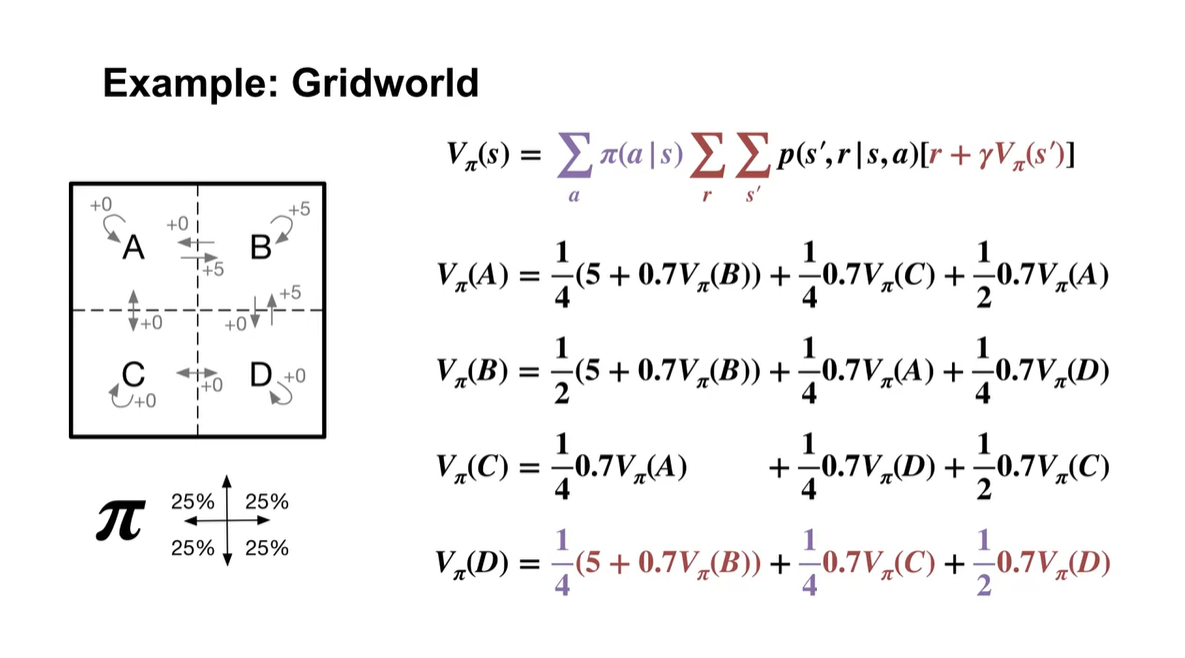
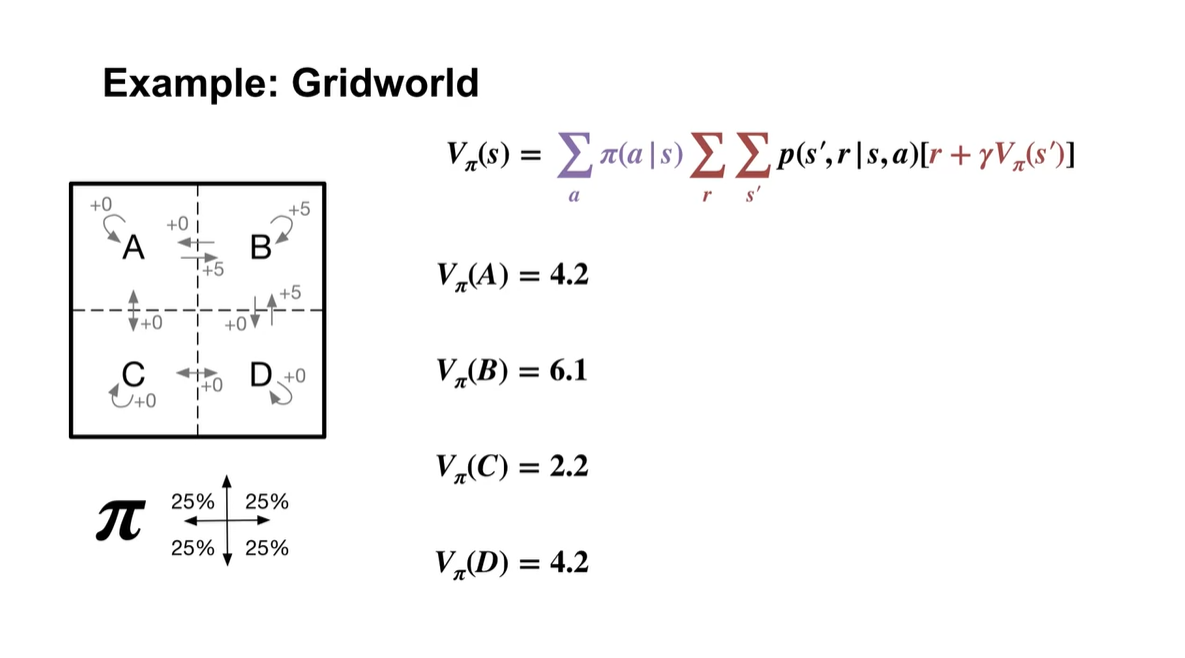
- Scalar 값으로 표현하면 아래와 같다.
-
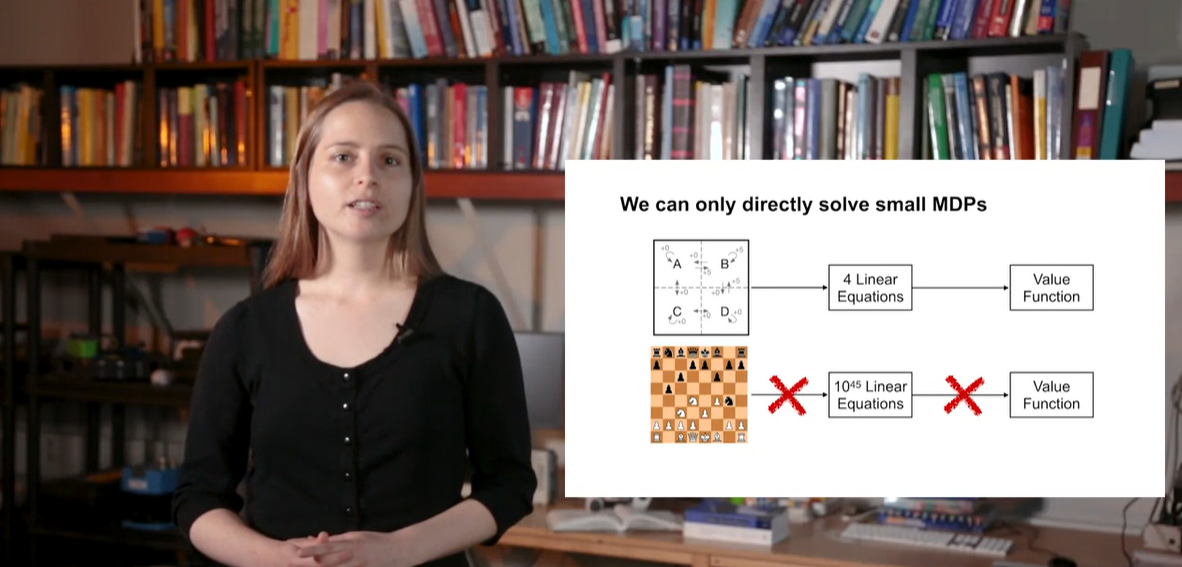
위와 같은 small MDP는 linear한 solution으로 해결이 가능하다.
- 그러나 chess game과 같은 상황에서는 매우 많은 경우의 수를 고려해야 하기 때문에 컴퓨터로 시뮬레이션 하여 value를 계산해야만 한다.
- Summary
Optimality (Optimal Policies & Value Functions)
Optimal Policies
- Optimal policy를 정의해보자.

- 이번 강의에서는 optimal policy의 개념과 모든 state에서 optimal policy를 선택하는 것이 왜 좋은지에 대해 이해해보려 한다.
-
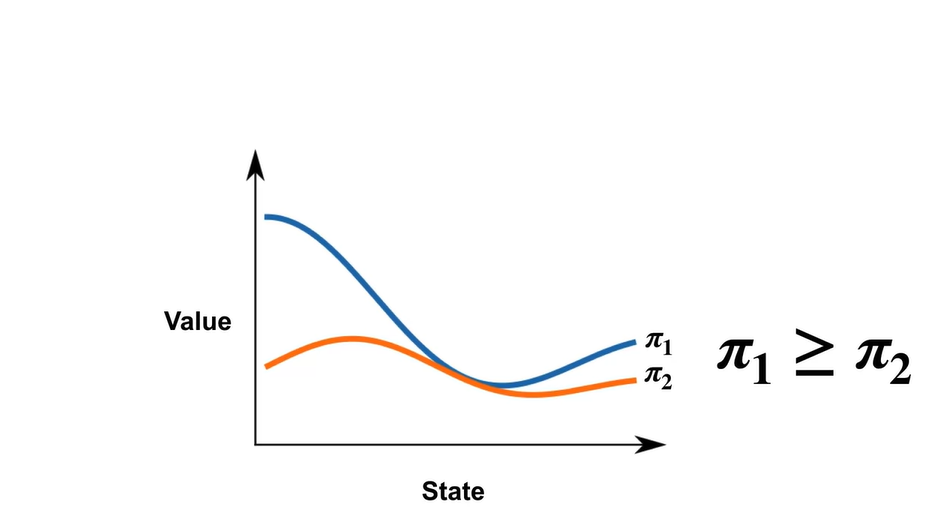
아래와 같은 두 policies 과 를 비교해보자.
- 가까운 states에서의 value가 더 큰 과 먼 states에서의 value가 더 큰 를 보고서는 둘 중 어떤 policy가 더 좋은지 판단하기 어렵다.
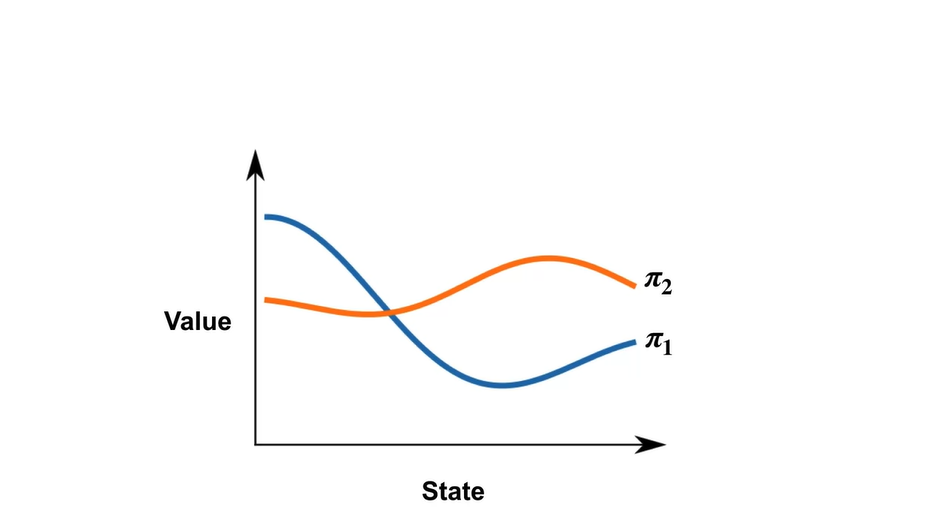
- 만일 이 항상 보다 크거나 같다면 이 더 좋은 정책이라고 말할 수 있다.
-
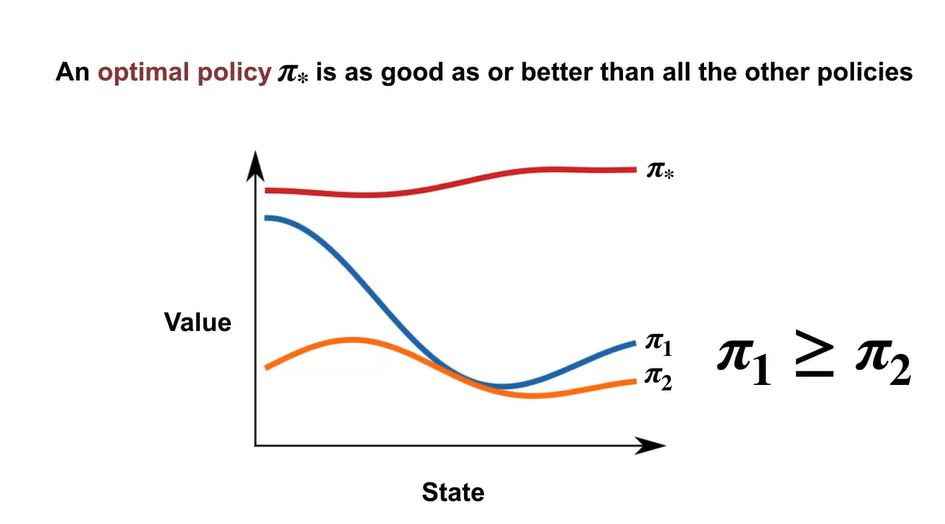
Optimal policy란 다른 모든 policy와 비교하였을 때 모든 states에서 항상 best인 policy를 의미한다.
- 아래 그래프에서는 가 optimal policy다.
-
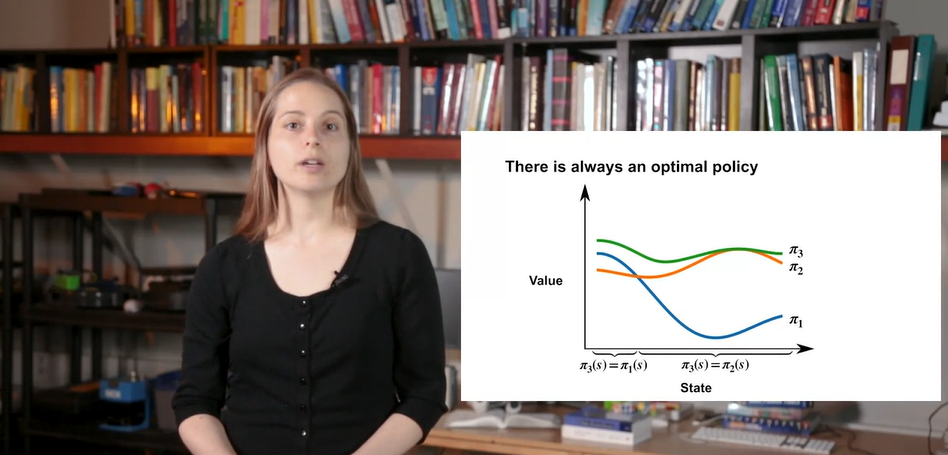
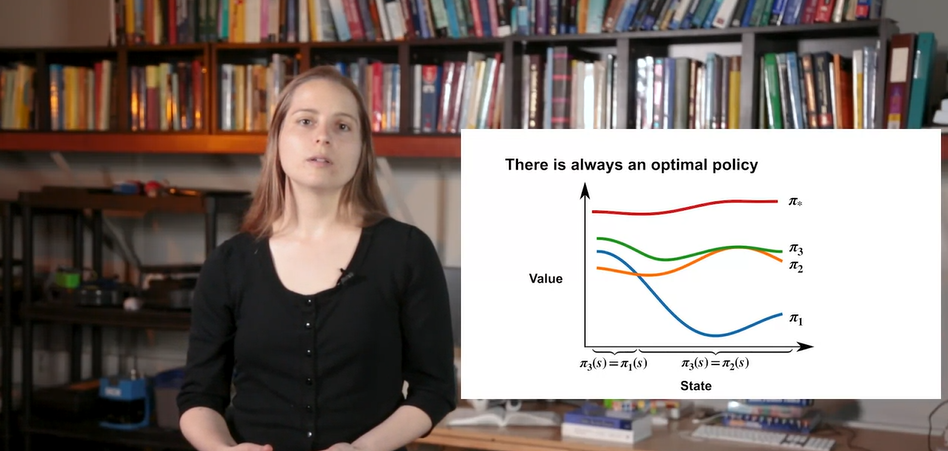
교차점을 기준으로 과 의 policy를 비교하여, 이 큰 states에서는 을 채택하고 가 큰 states에서는 를 채택한 policy를 라고 하자.
- 즉, 모든 states에서의 best policy를 매번 선택한다면 optimal policy는 적어도 하나 이상 존재한다고 결론지을 수 있다!
-
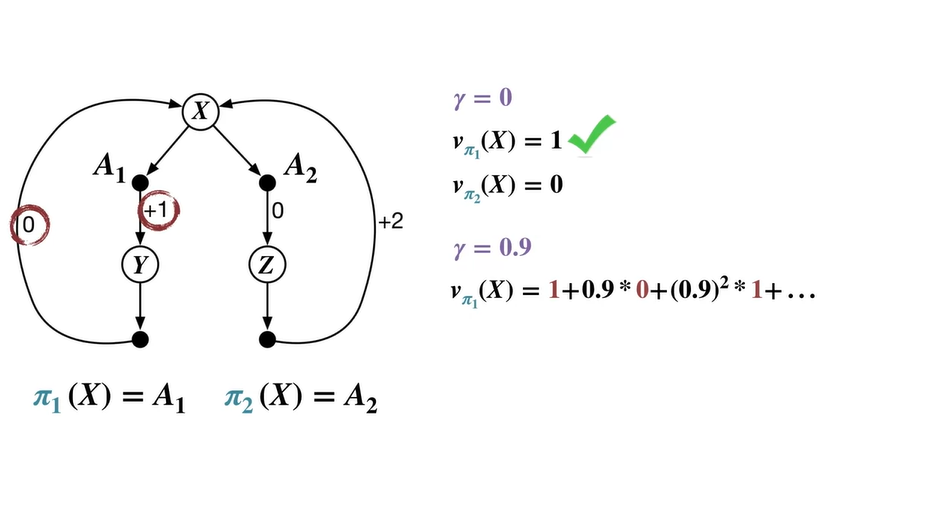
아래와 같은 MDP process가 존재한다고 가정해보자.
- state에서 시작하여 과 로 넘어갈 수 있는 system이라면 , 다.
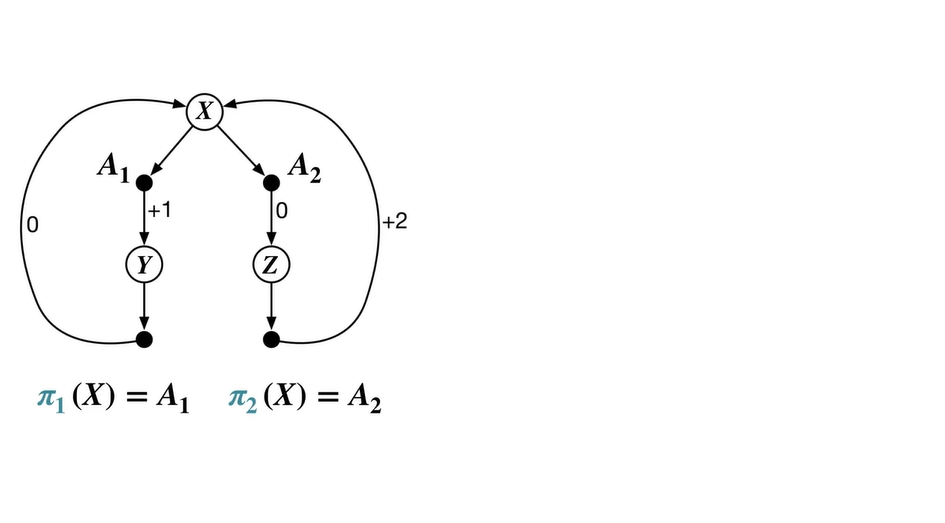
-
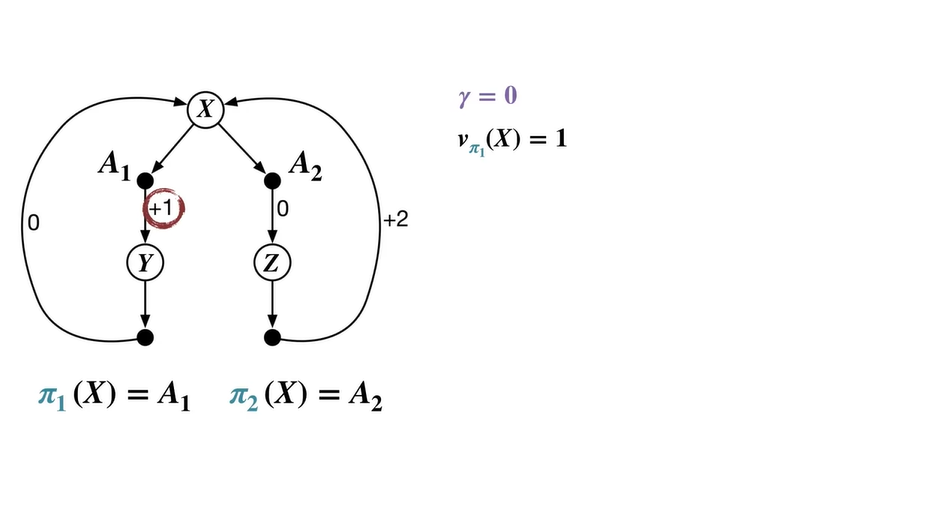
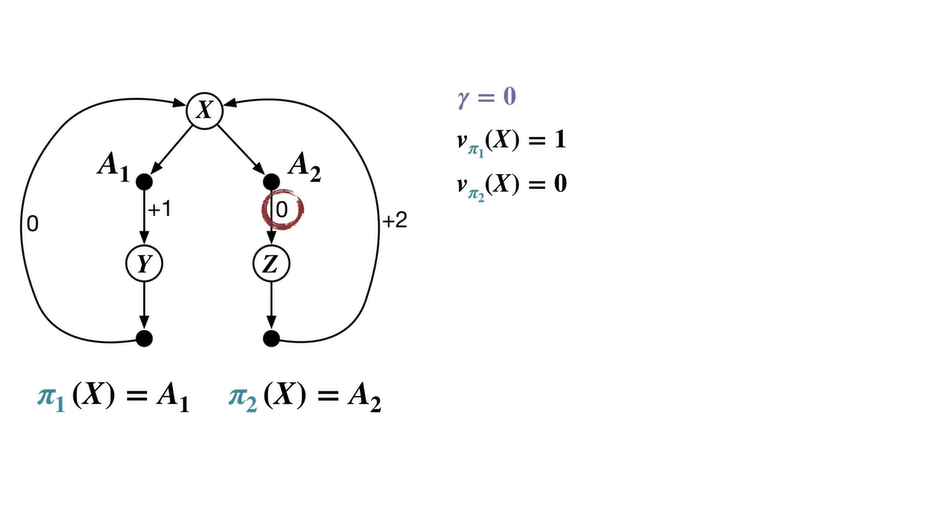
이면 미래 가치를 전혀 고려하지 않고 당장의 reward만을 계산한다.
-
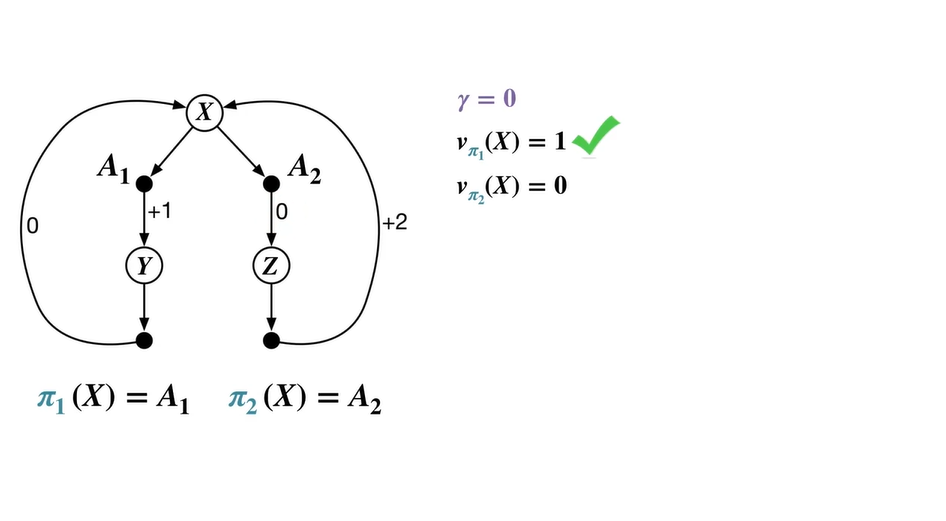
따라서 , 이다.
- 이 때의 optimal value는 을 따르는 이며 을 optimal policy로 채택한다.
-
-
면 미래 가치를 감쇄하여 더한 reward의 평균을 계산한다.
-
Policy 을 따르는 value는 1 → 0 → 1 → 0, ...의 연쇄에 를 제곱배하여 더한 급수로 표현된다.
- Geometric function으로 나타내면 이다.
-
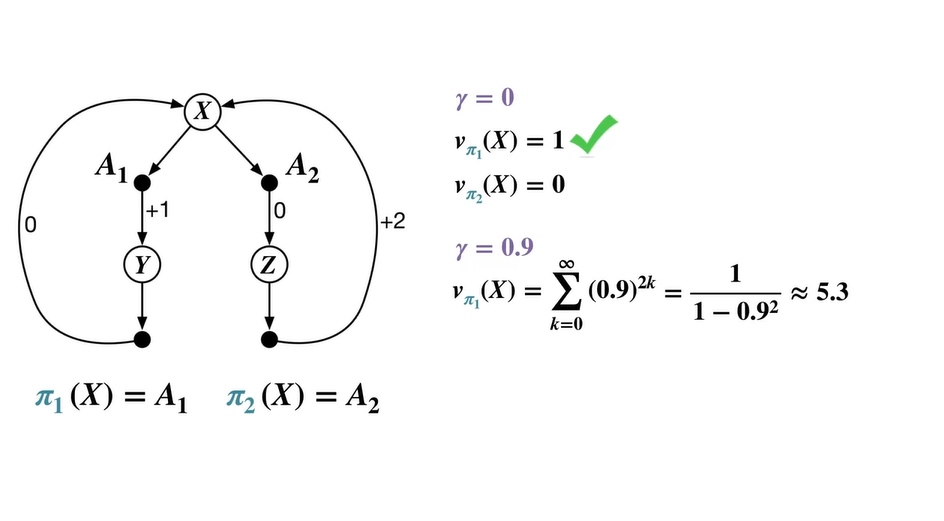
-
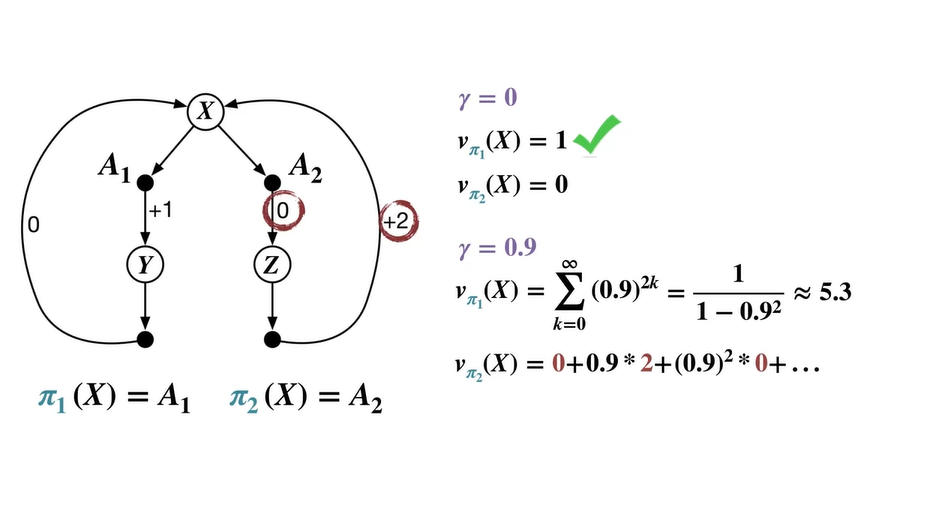
Policy 를 따르는 value는 0 → 2 → 0 → 2, ...의 연쇄에 를 제곱배하여 더한 급수로 표현된다.
-
Geometric function으로 구하면 이다.
- 이 때의 optimal value는 을 따르는 이며 을 optimal policy로 채택한다.
-
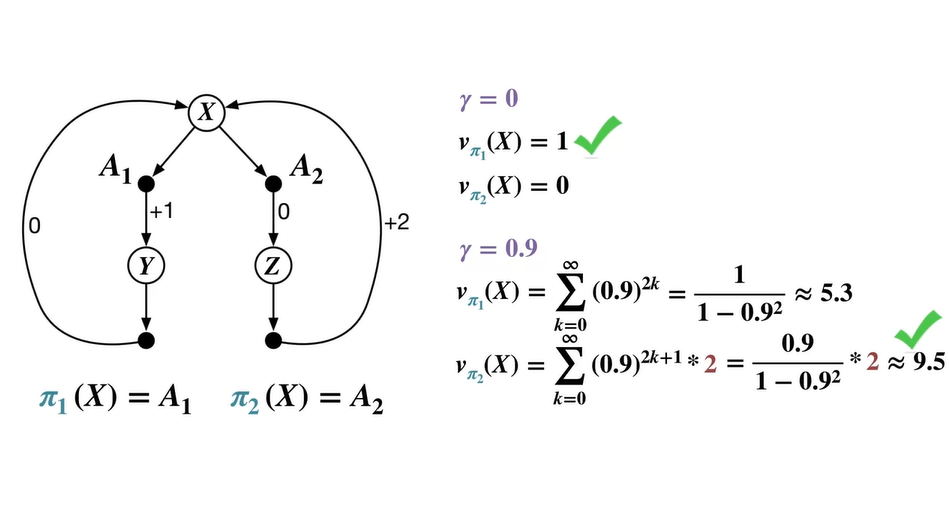
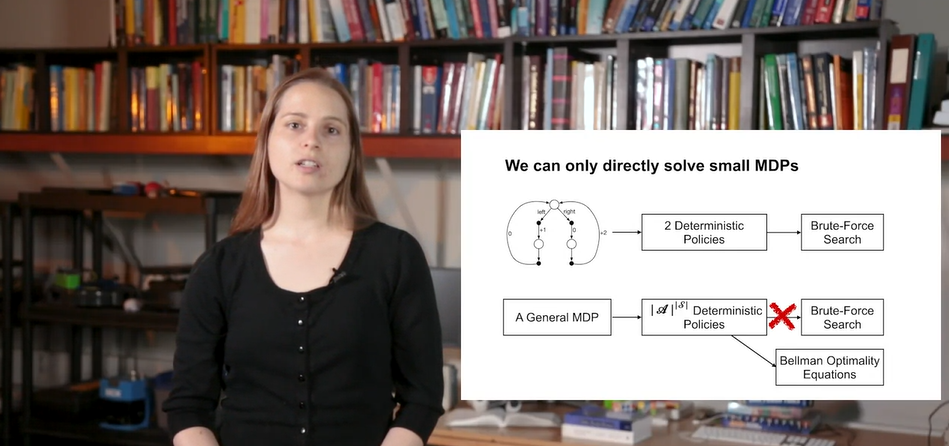
-
위 예제는 매우 간단한 MDP process였기 때문에 Brute-force 알고리즘으로 optimal value&policy를 찾아낼 수 있었다.
- 일반적인 MDP는 수많은 states의 연속이기 때문에 Bellman Optimality Equations로 policy를 채택하여야 한다.
Optimal value functions
- Optimal value function은 어떻게 구해질까?
- 이번 강의에서는 state-value function과 action-value function의 Bellman optimality equations를 유도해보자.
-
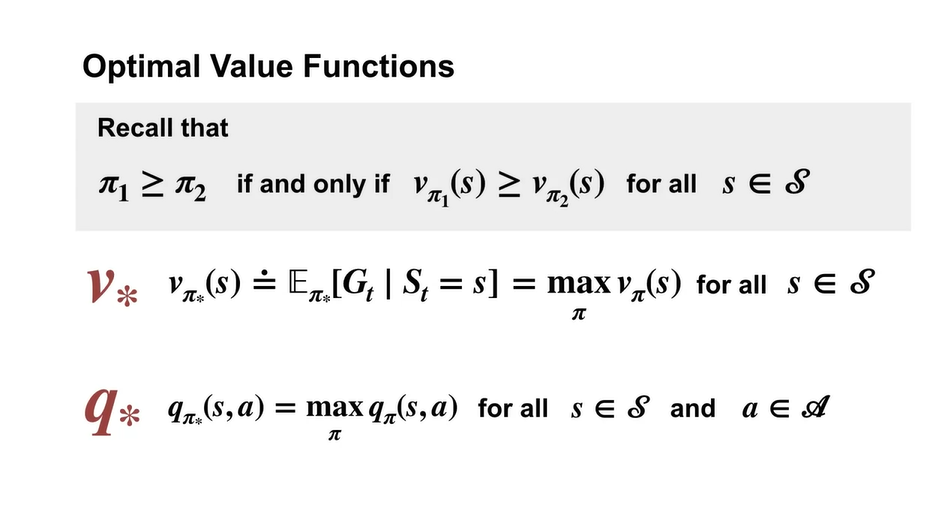
모든 states에서 policy 을 따르는 value가 항상 크다면 이 보다 크다고 말할 수 있었다.
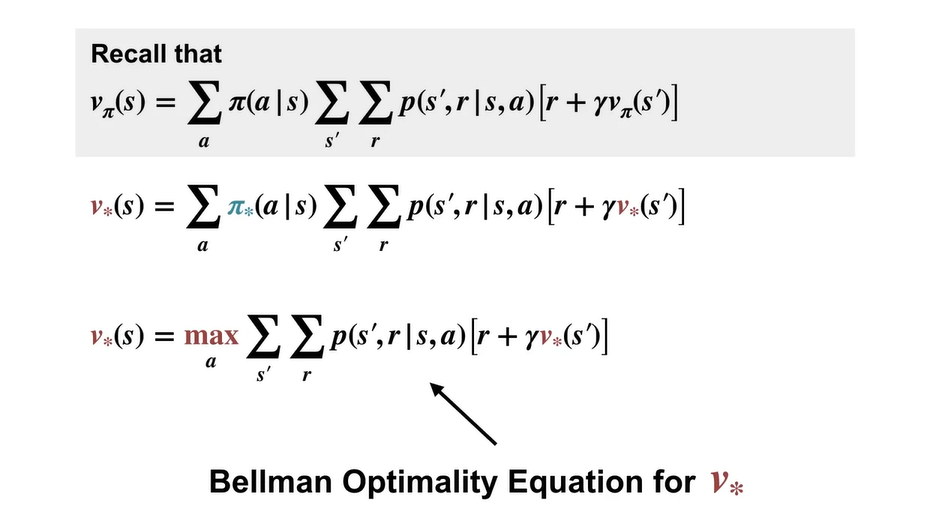
- 따라서 optimal state-value 는 모든 states에서의 optimal value를 가리킨다.
- 마찬가지로 optimal action-value 는 모든 states와 취한 actions에서의 optimal value를 가리킨다.
-
는 policy 가 결정되었을 때의 value를 계산하여 구할 수 있다.
- 따라서 현재 state에서 action이 max(optimal)한 value를 계산하여 나타낸 것이 바로 Bellman Optimality Equation for 다.
-
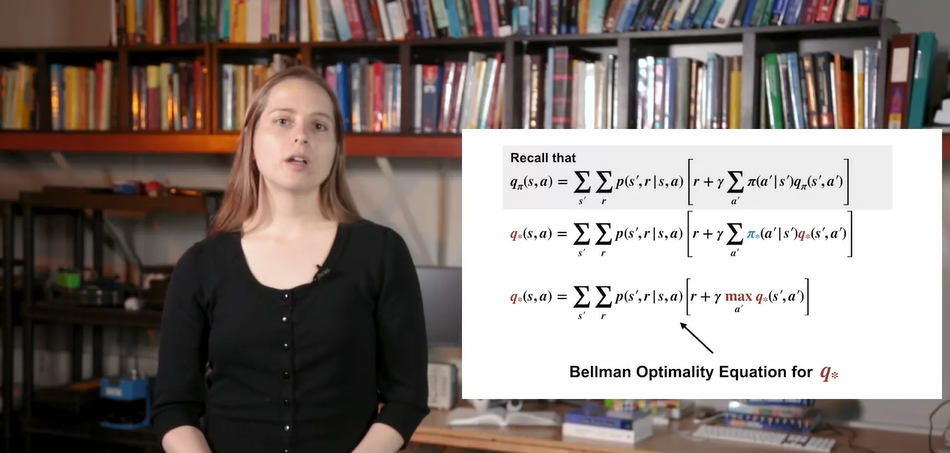
는 해당 state에서 action이 이미 결정된 상태에서, policy 가 결정되었을 때의 value를 계산하여 구할 수 있다.
- 따라서 현재 state에서 action'이 max(optimal)한 value를 계산하여 나타낸 것이 바로 Bellman Optimality Equation for 다.
-
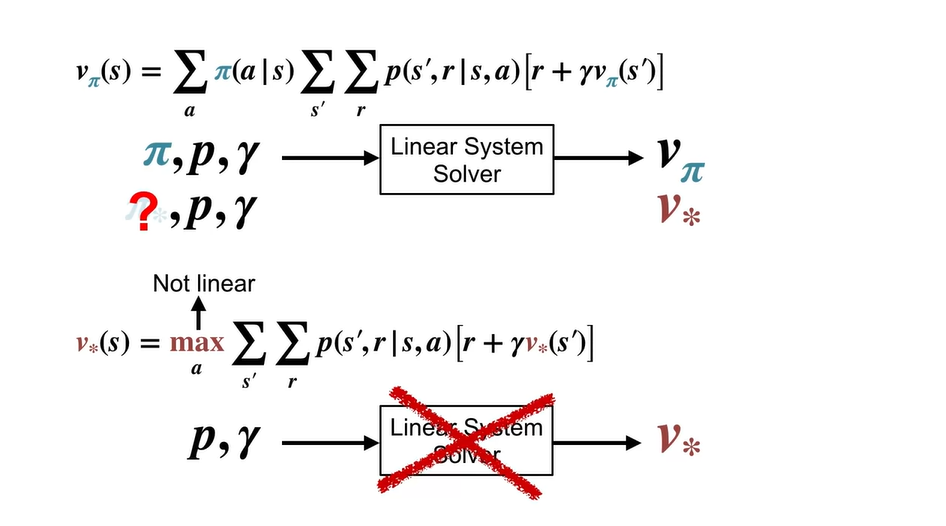
기존 Bellman Equation은 linear equation으로 풀 수 있었으나 optimality가 포함되면 non-linear system이 되어 linear equation으로 풀 수 없다.
- 왜냐하면 기존 Bellman Equation으로는 를 알아낼 수 없기 때문이다.
- Summary
Using Optimal Value Functions to Get Optimal Policies
- Optimal Value Functions을 이용하여 Optimal Policies를 선택해보자.
- 이번 강의에서는 optimal value와 optimal policy간의 관계를 정의할 것이다.
-
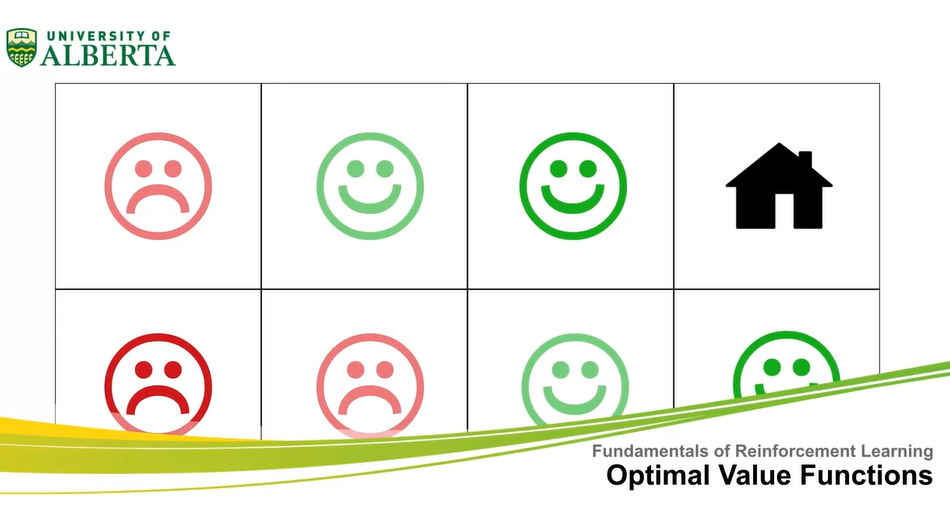
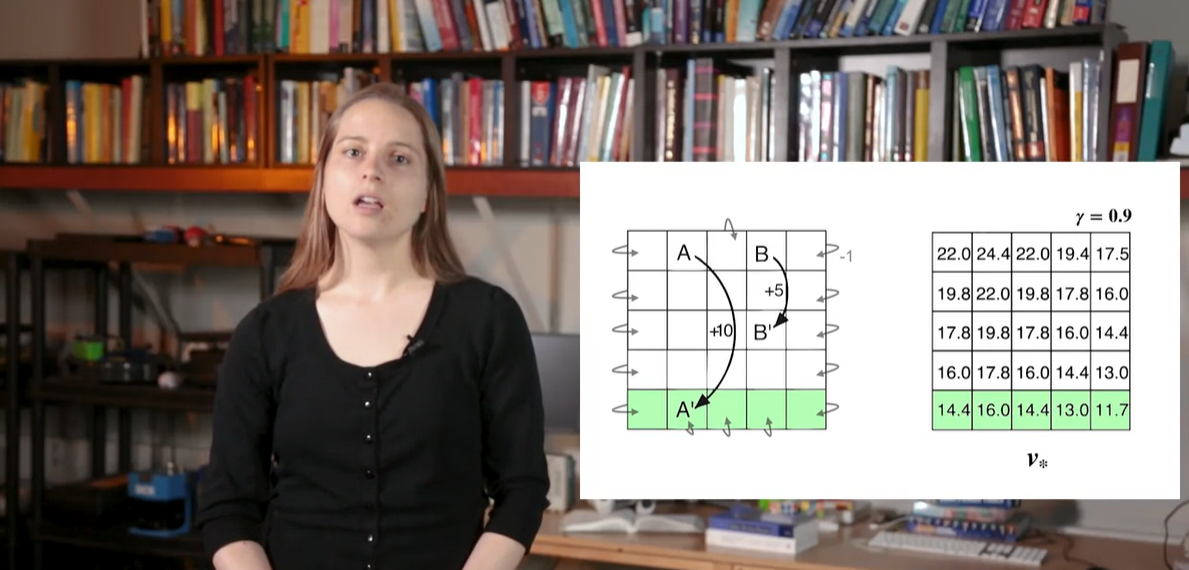
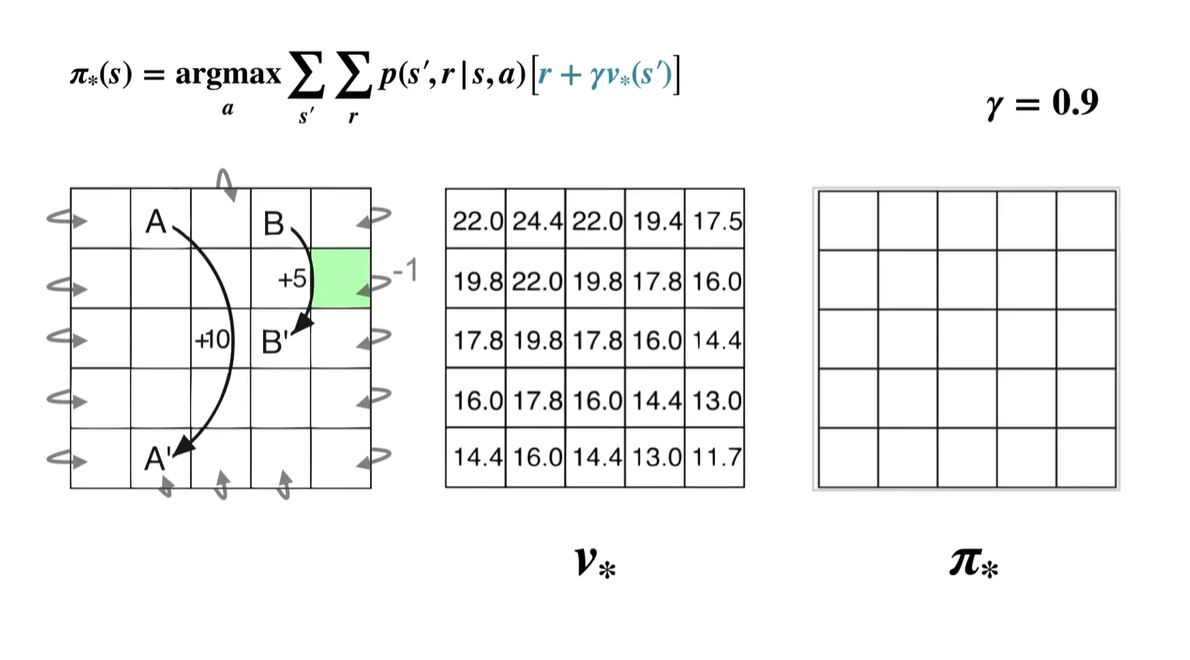
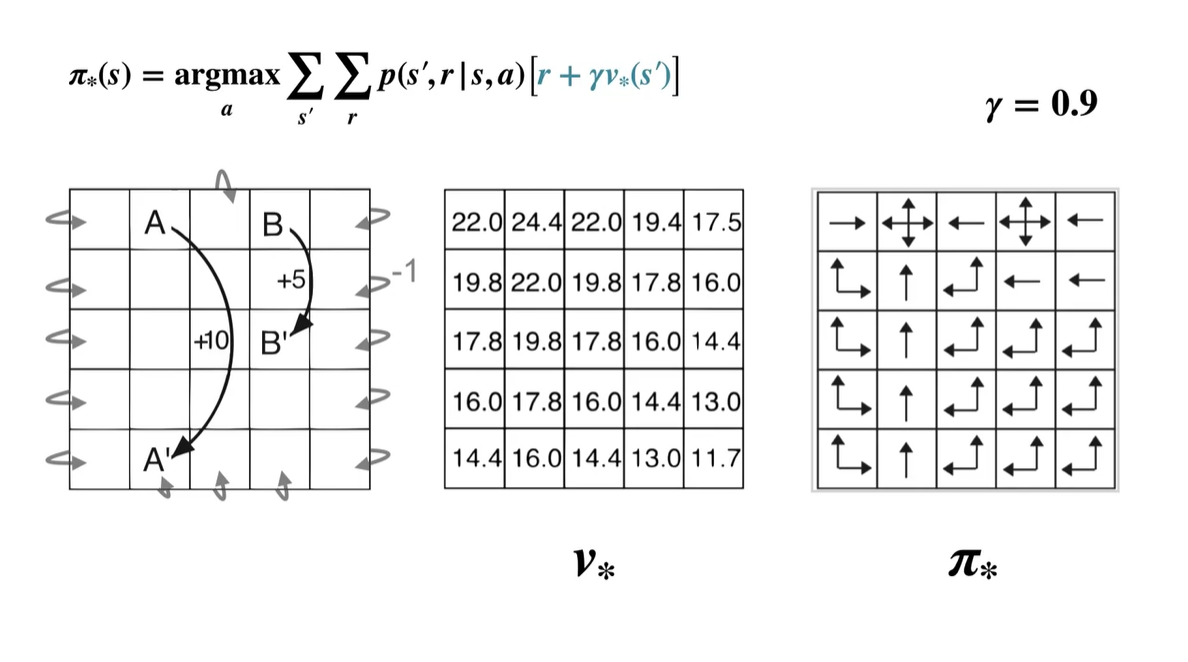
이전에 다뤘던 예제에서의 board values가 오른쪽과 같이 계산되었다고 하자.
-
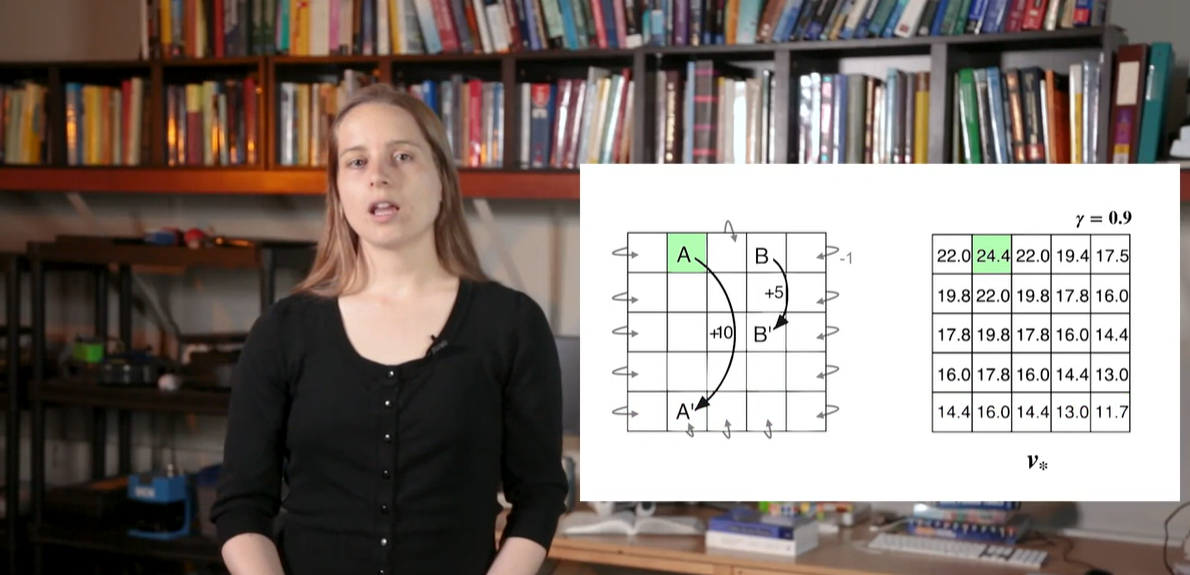
이전에는 맨 밑의 row가 -값의 reward를 받았으나, optimal value로 계산한 결과 다소 높은 +값의 value를 획득했다는 것을 알 수 있다.
- 마찬가지로 initial state A의 value 또한 24로, 다소 높은 값을 가진다.
-
-
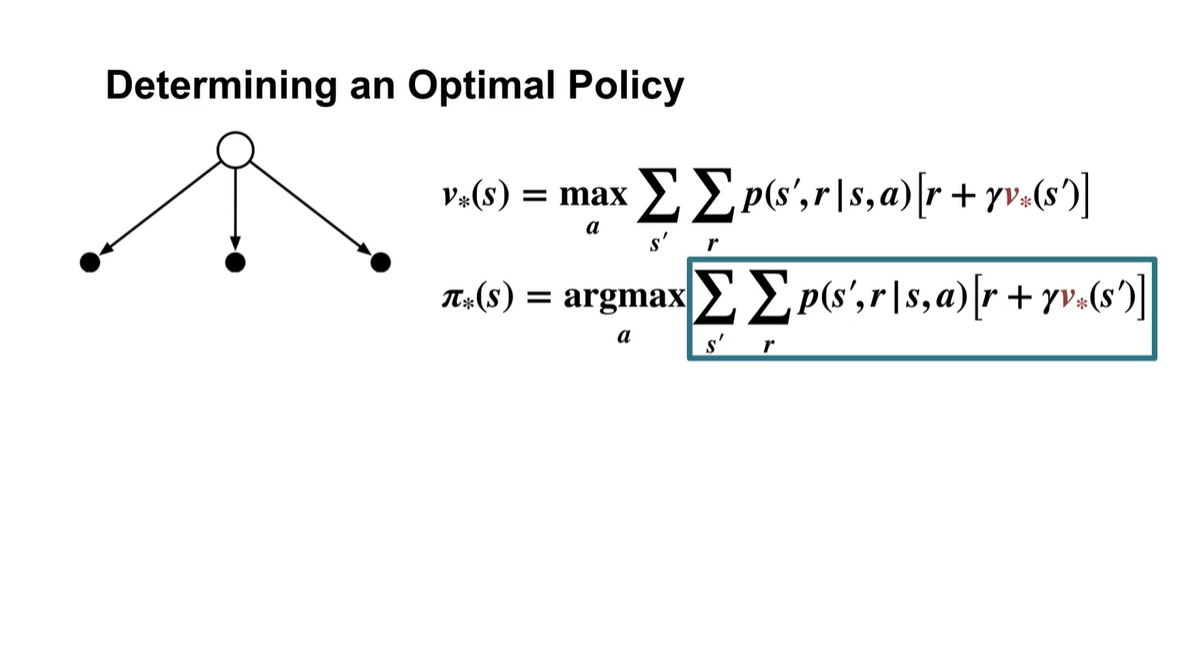
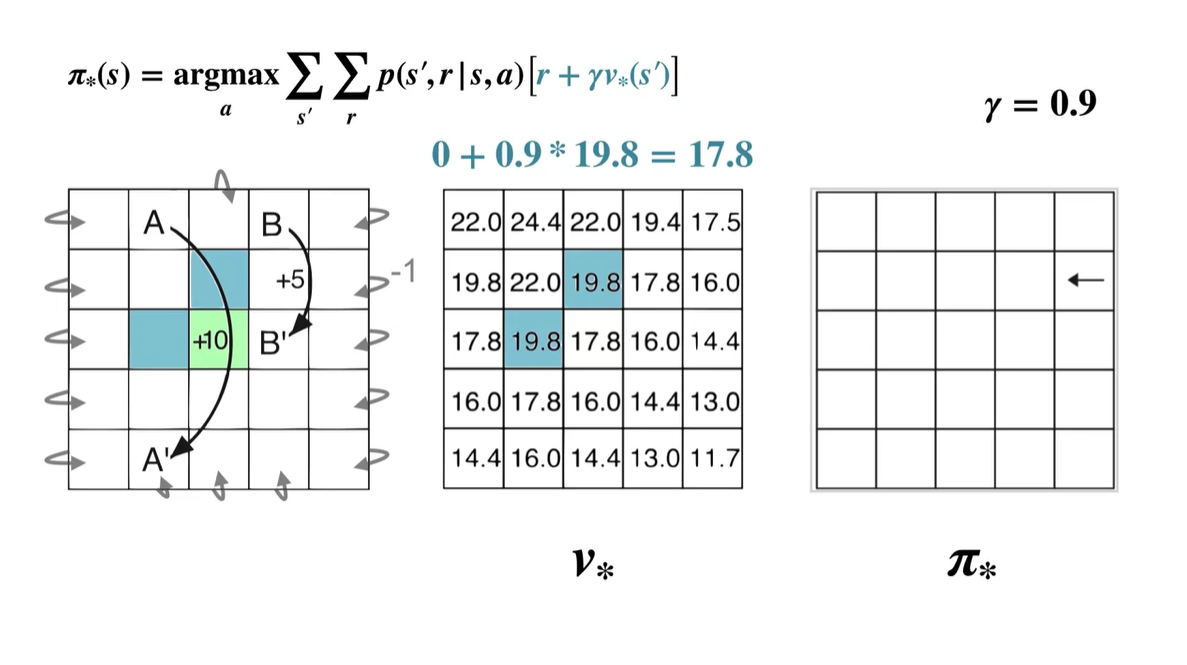
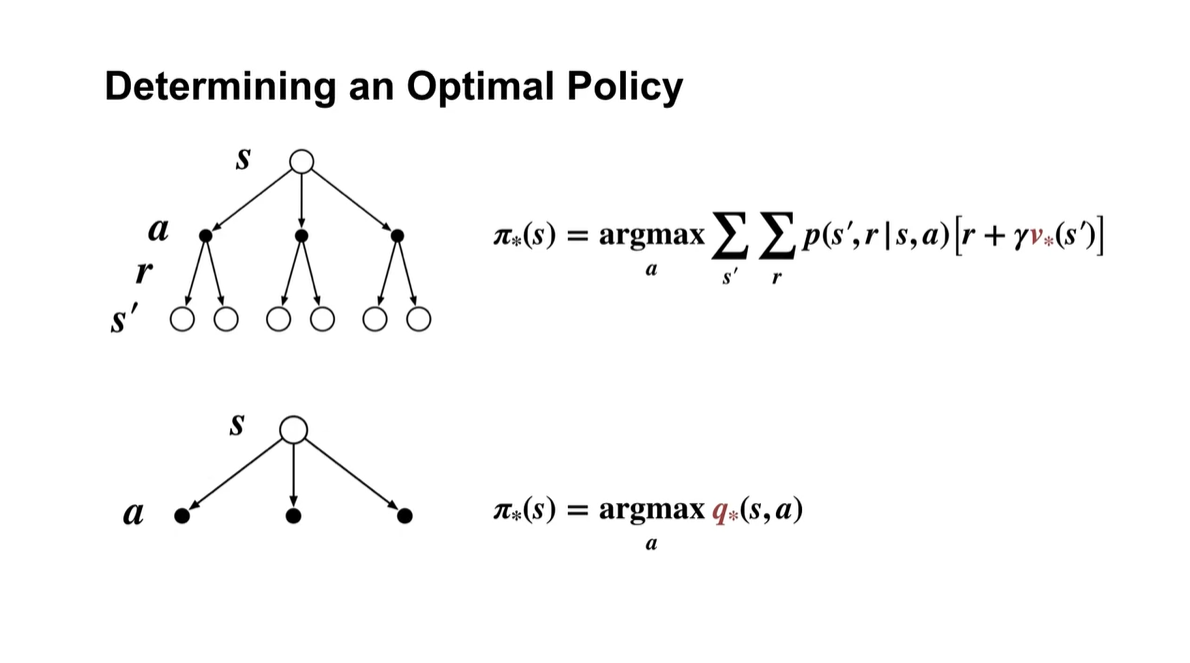
Optimal Policy를 결정하는 것은 optimal value일 때의 argmax로 알 수 있다.
-
즉, 어떠한 action을 취하였을 때 value가 max값을 가진다면, 해당 action을 선택하는 것이 무엇인지를 알아내는 것(argmax)이 optimal policy인 것이다.
-
-
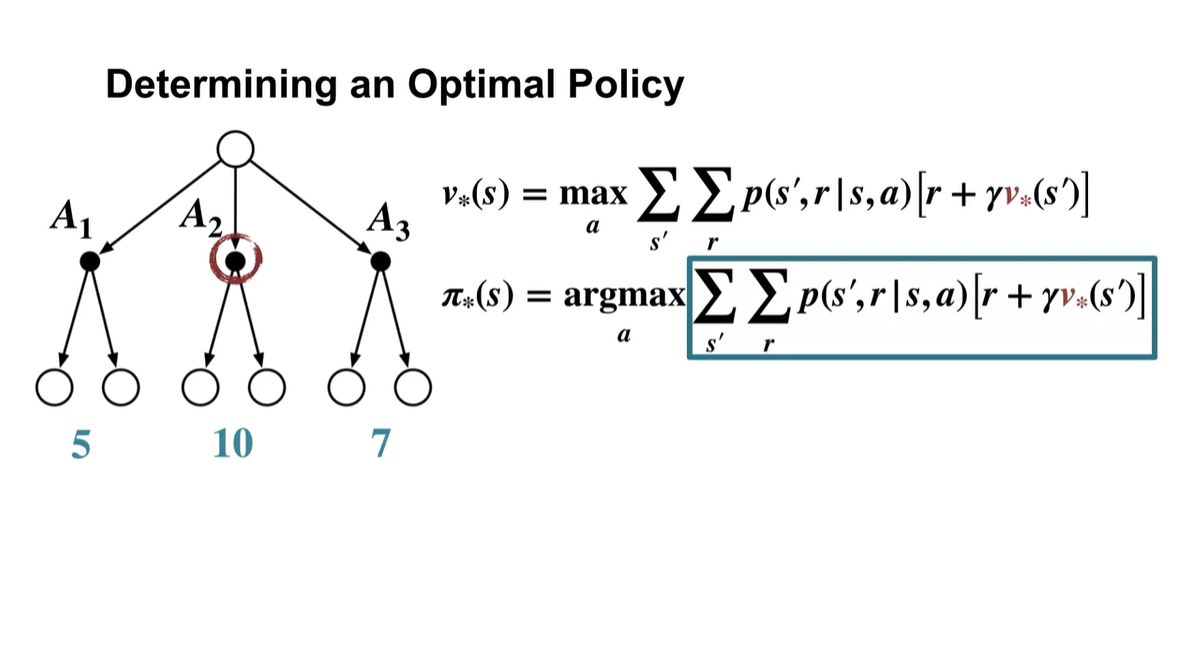
아래와 같이 , , 의 action을 선택하였을 때 얻어지는 value가 각각 5, 10, 7의 값이라면 는 를 action으로 취하였을 때 얻어지는 value인 것이다.
- 그리고 그 다음 state에서 얻어지는 최적의 value()를 다시 고려한다.
-
만약, 초록색으로 색칠된 부분에서 initial state를 갖게 되었다고 해보자.
- 는 0.9의 감쇠 효과를 가진다.
-
이제 initial state에서 상하좌우로 움직여 각 움직임에서 얻어지는 value를 계산해보자.
- Up :
- Right :
- Down :
- Left :
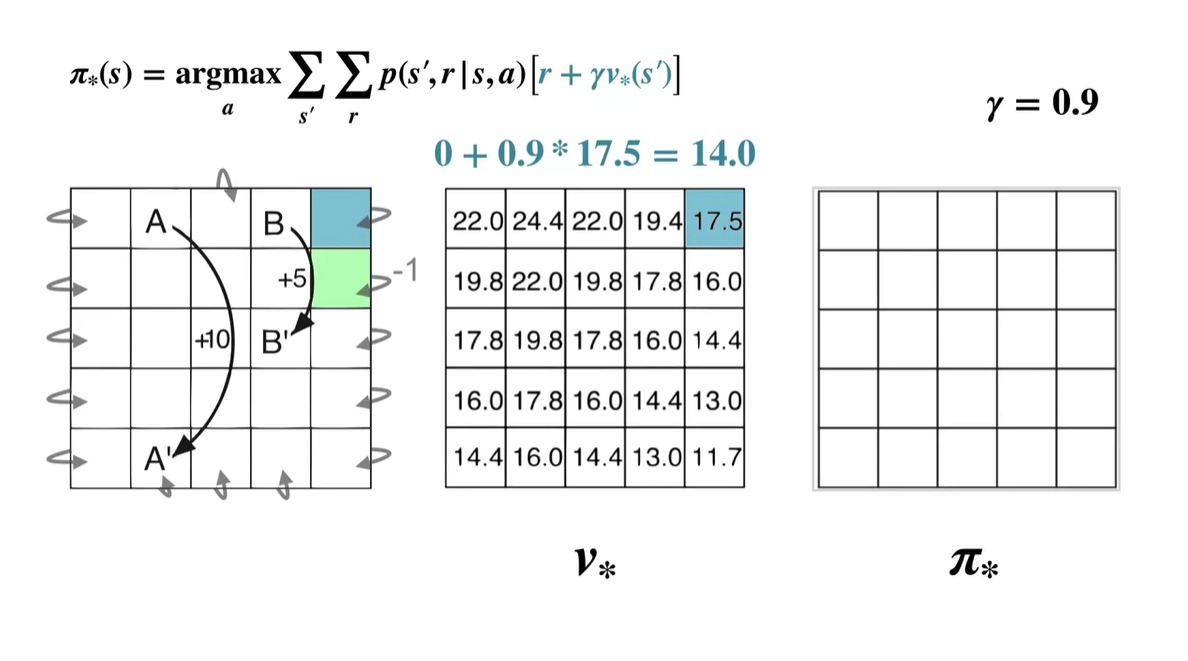
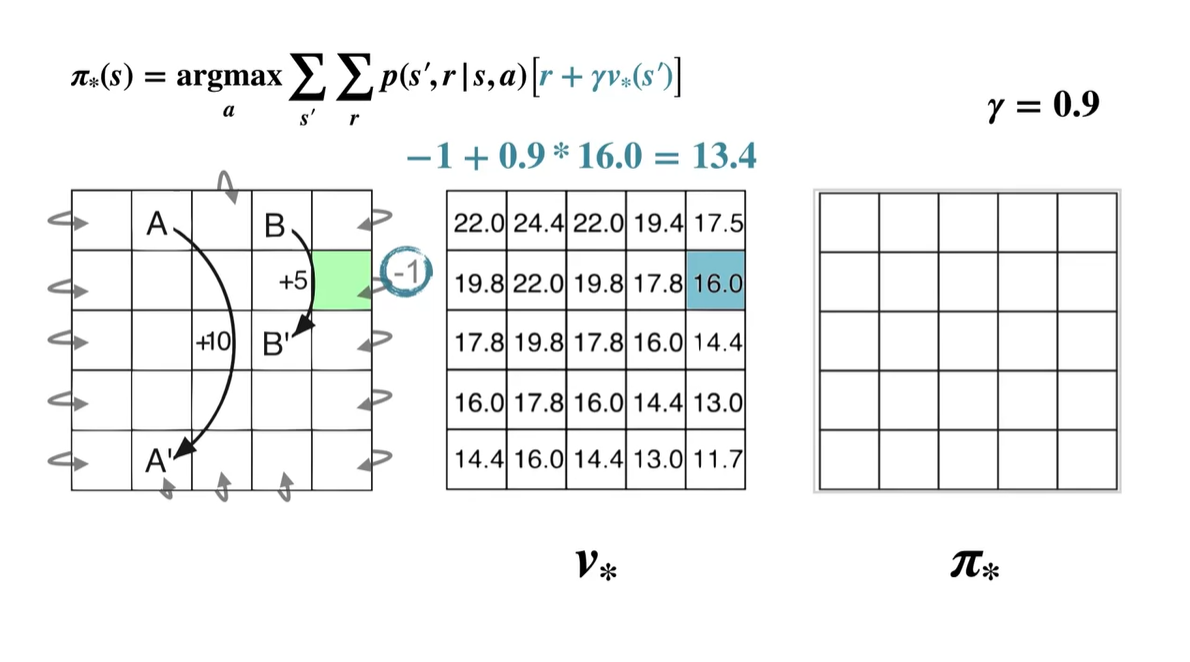
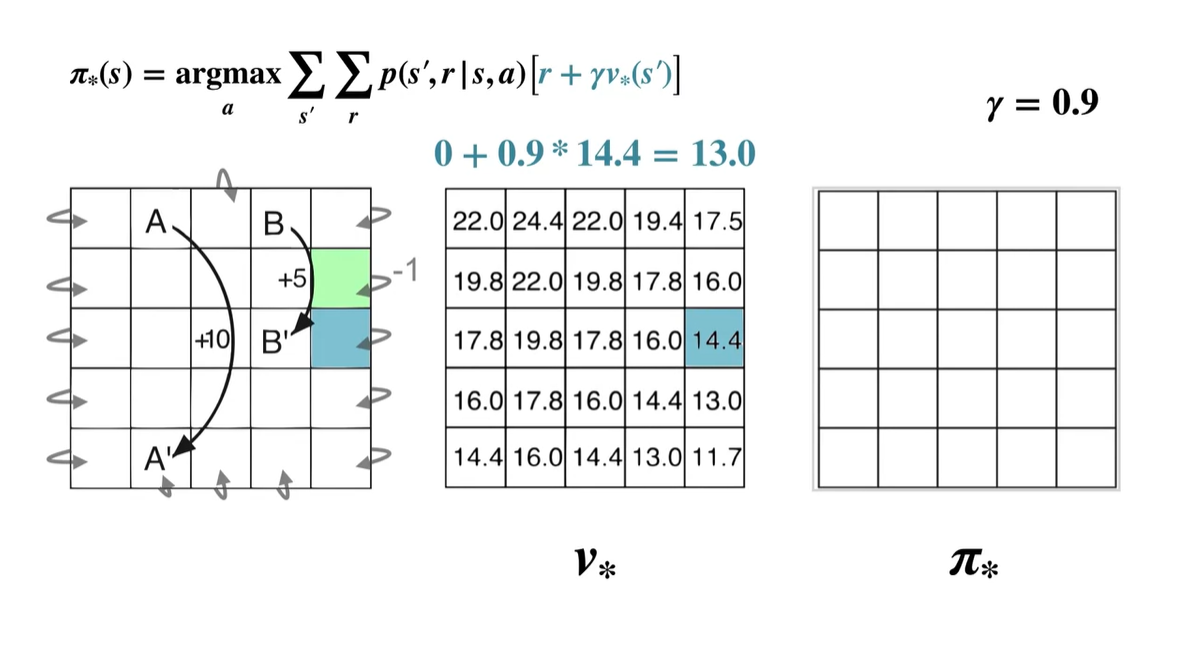
- 계산된 value 중 가장 큰 값을 갖는 policy는 Left이므로 는 ← 이다.
-
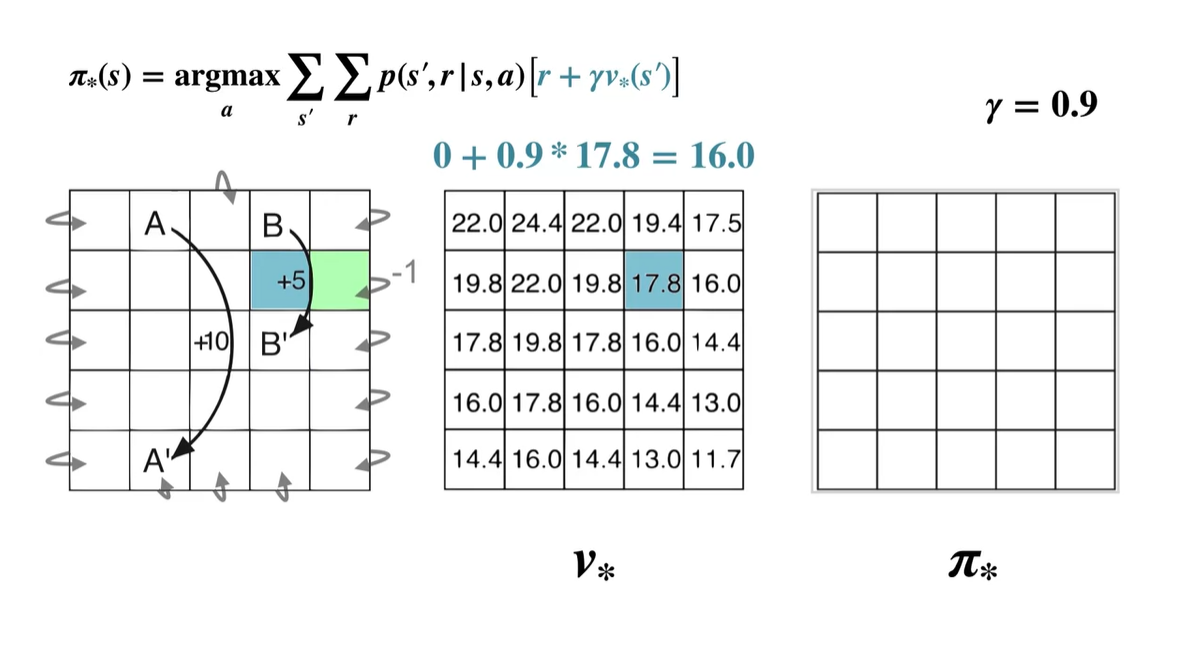
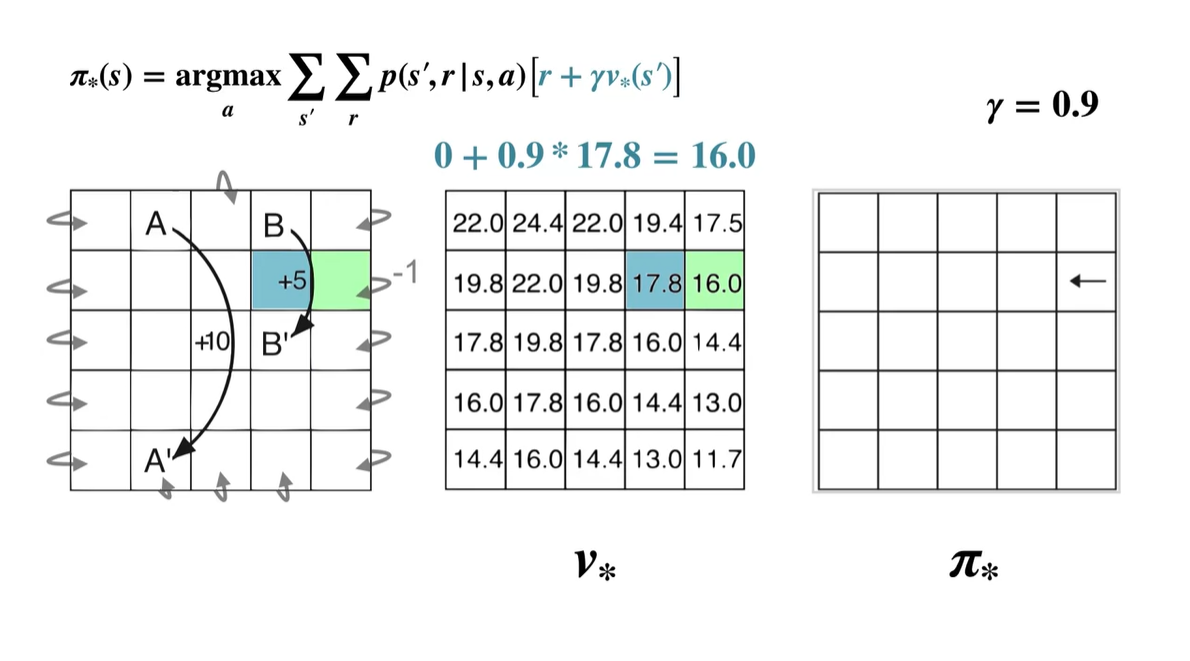
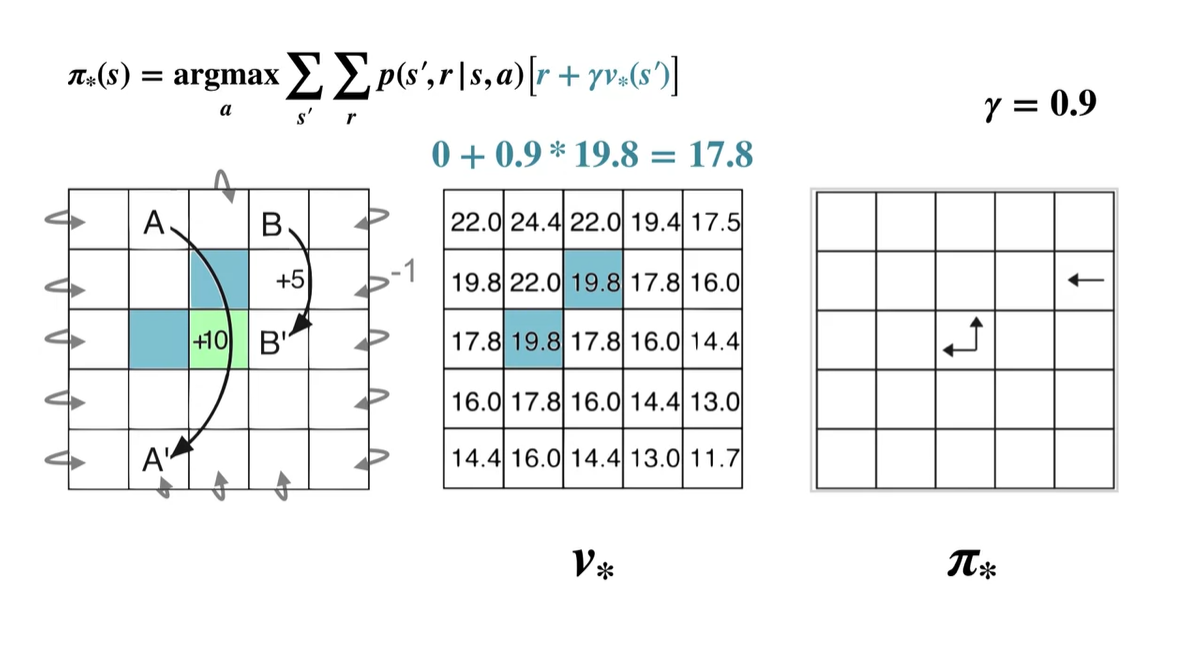
이번에는 다른 state에서 계산해보자.
- 파란색 박스의 value가 모든 action-value 중 가장 크기 때문에 optimal policy 는 Up, Left다.
-
A state의 경우는 어떤 행동을 취하든지에 상관없이 +10의 reward를 받는 A' state로 전환된다.
- 따라서 당장의 optimal policy는 Up, Right, Down, Left 경우의 수를 모두 갖는다.
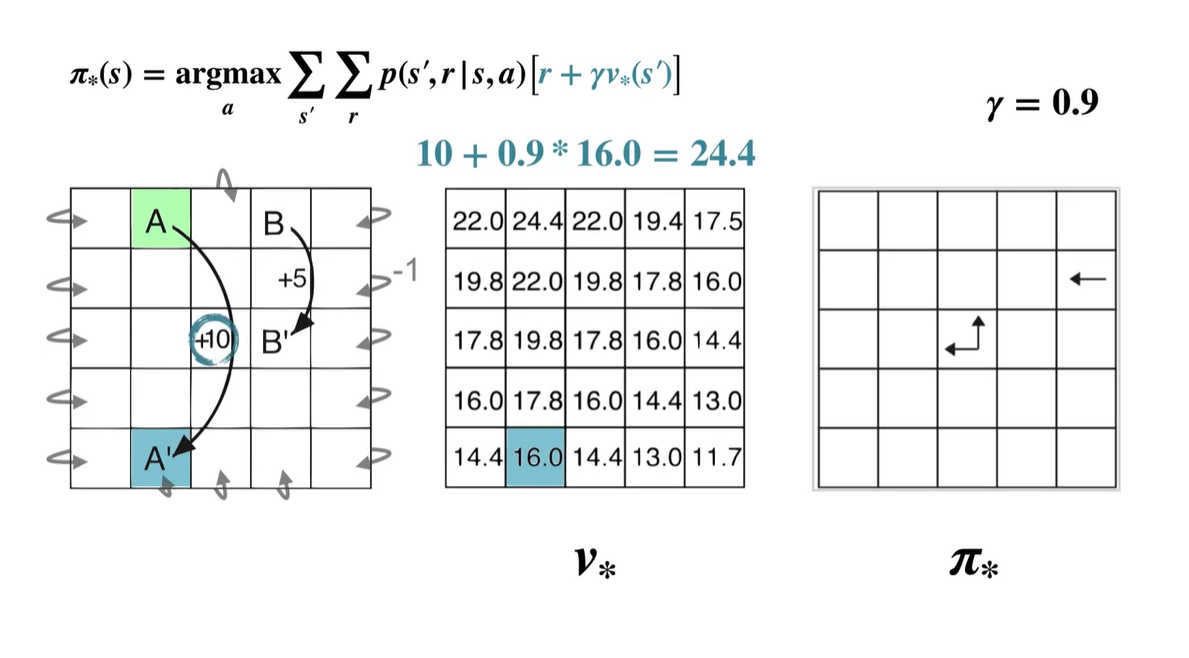
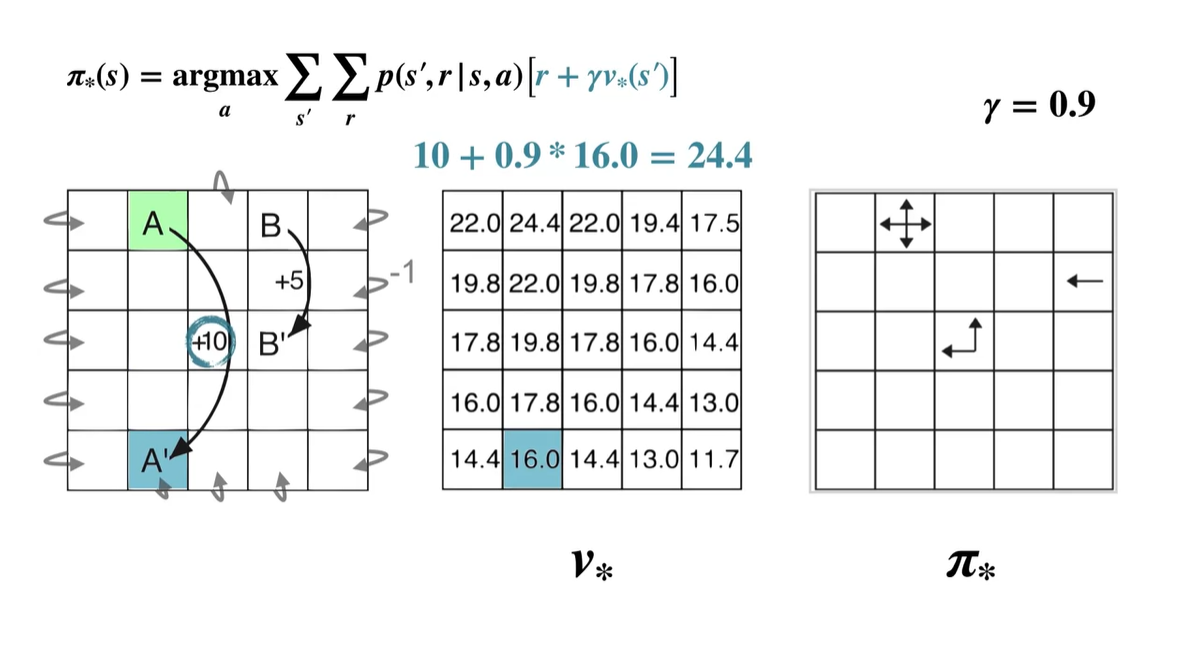
- A state에서의 optimal value는 A' state로 전환되었을 때의 value 다.
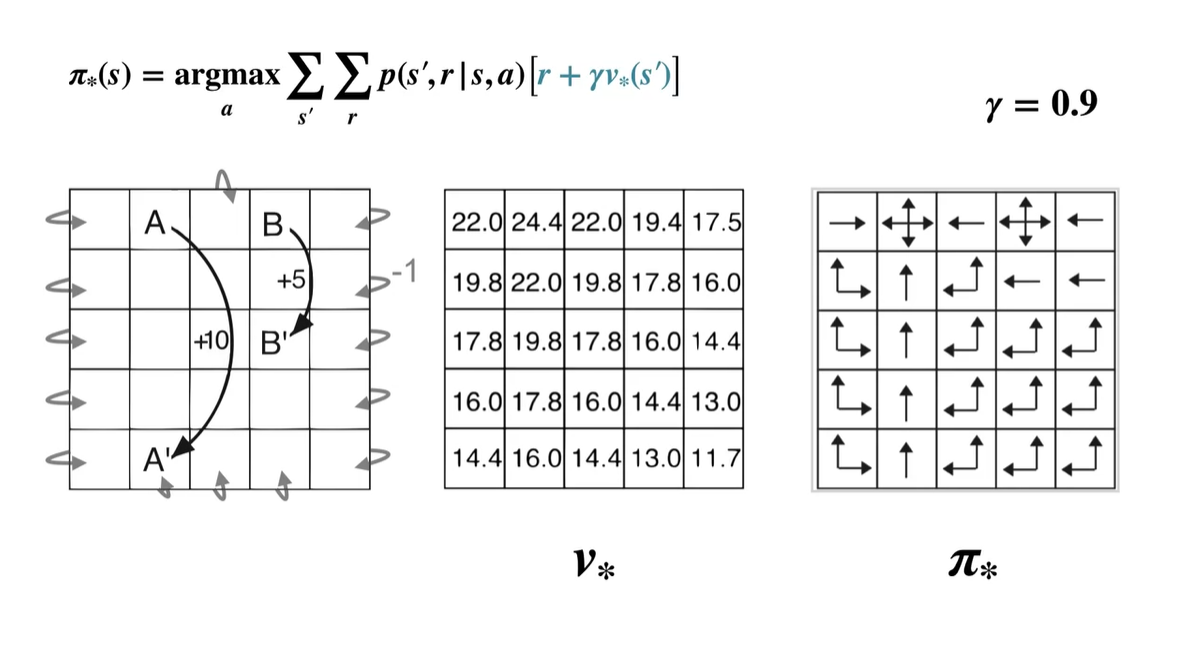
- 이렇게 모든 state에서의 optimal policy와 optimal value를 계산한 결과는 아래와 같다.
-
Optimal policy의 결정은 어떠한 action을 취했을 때의 value가 가장 높은(optimal value를 갖는) 선택지를 찾아내는 것이다.
- 따라서 로 정의한다.
- Summary