[RL] Sample-based Learning Methods Week 1
Monte Carlo Methods for Prediction & Control
Introduction to Monte Carlo Methods
What is Monte Carlo?
- Monte Carlo methods에 대해 알아보자.
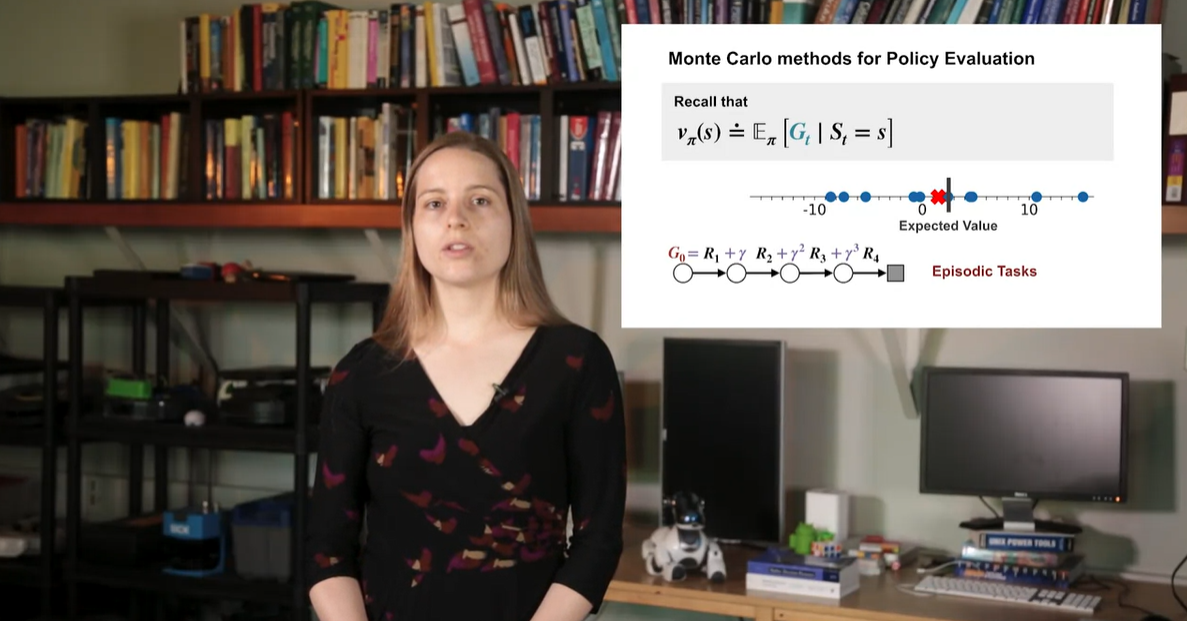
- 이번 강의에서는 Monte-Carlo methods를 통해 value function을 estimate하는 방법에 대해 알아보겠다.
-
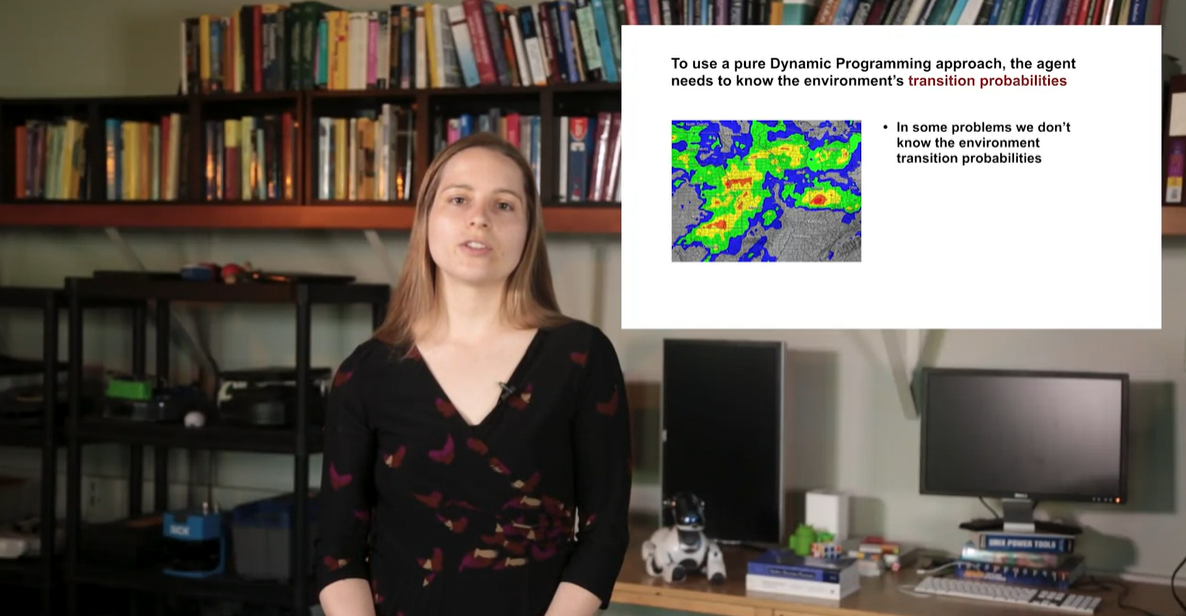
Dynamic Programming은 environment의 transition probabilities를 알 때 적용할 수 있는 method라고 할 수 있다.
- 그러나 날씨 예측과 같은 문제는 transition probabilities를 알지 못하기 때문에 다른 방법으로 풀어야 한다.
- 이러한 계산(computation)은 매우 지루하고 소모적인 과정이라고 할 수 있다.

-
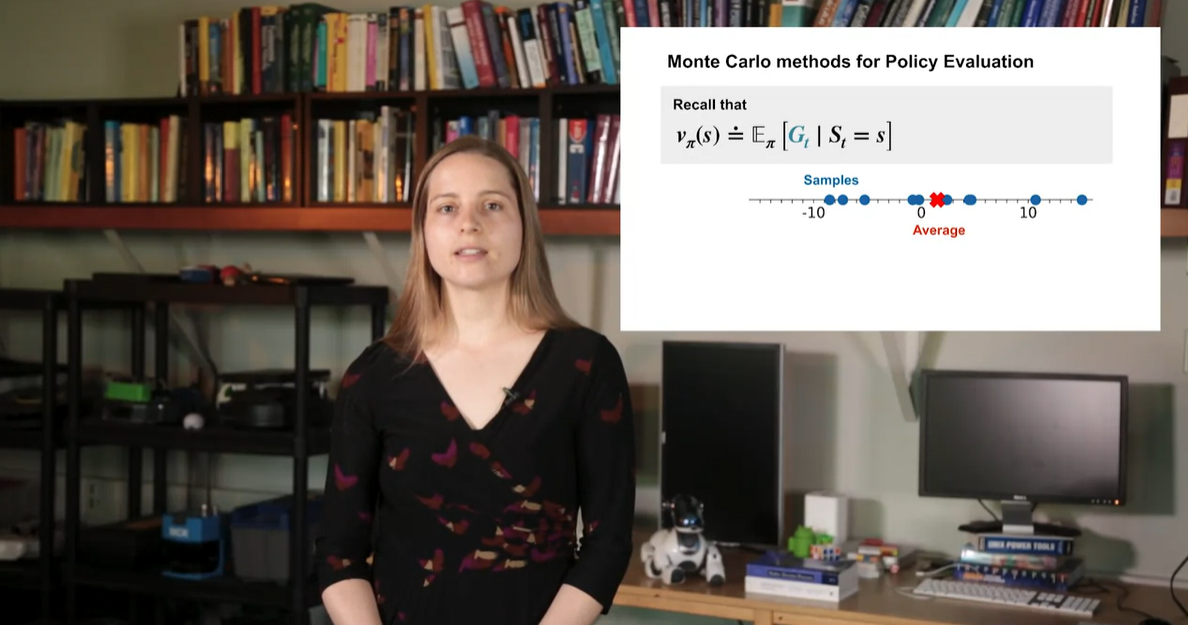
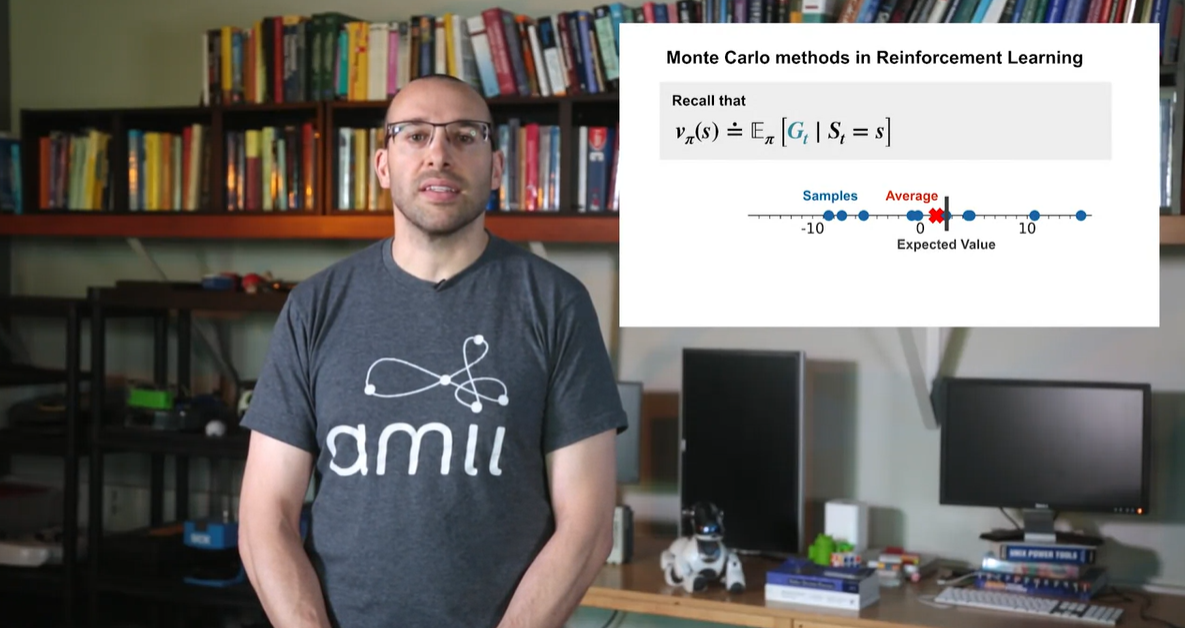
Monte Carlo methods는 큰 수로 random sampling한 sample set에 대하여 평균낸 값으로 value를 estimate하는 방법론이다.
- 아래와 같은 variables들로 선정된 samples의 average를 구해보니 41.57의 결과가 나왔다.

- Monte Carlo methods는 samples로 average낸 policy evaluation을 구하는 것으로부터 출발한다.
-
이후 episodic tasks를 반복해가며 State-Action-Reward-State-Action을 취한다.
- 그러면 여러 sample의 평균치들이 점점 expected value로 수렴해가는 것을 알 수 있다.
-
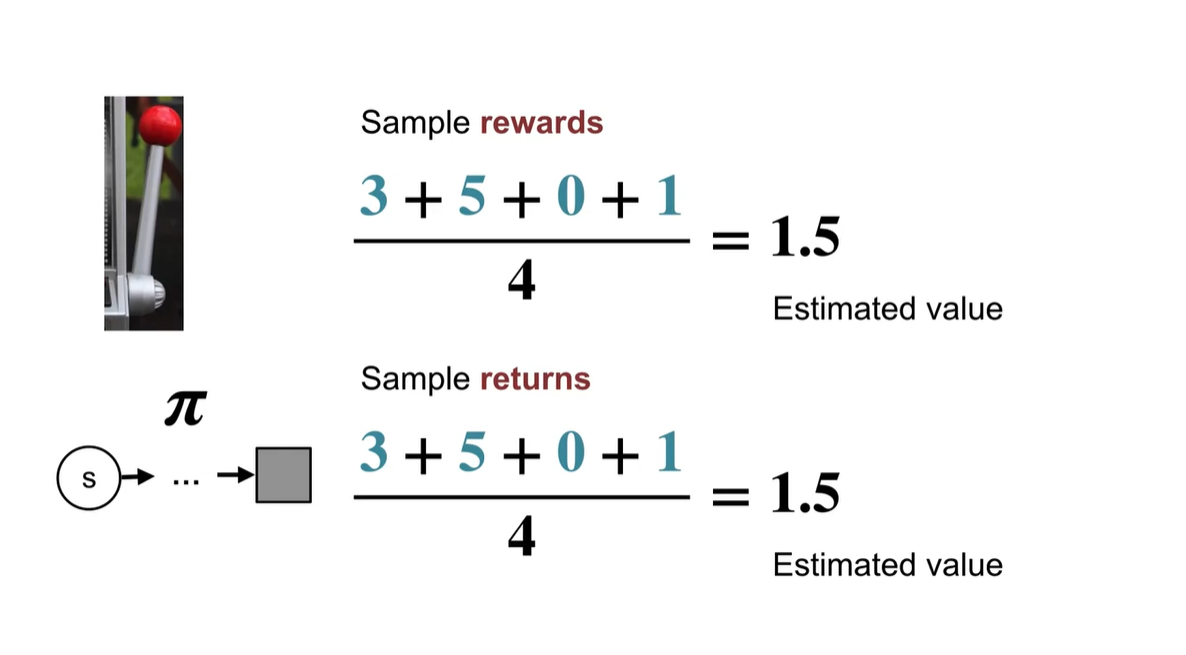
이전에 우리가 했던 K-armed Bandit problem이 Monte-Carlo methods와 같은 맥락이라고 볼 수 있다.
- 4개의 samples로 rewards의 기댓값을 계산한다는 것은 policy 를 따르는 action-state를 반복하여 얻어낸 rewards의 평균치를 계산하는 것과 같다.
-
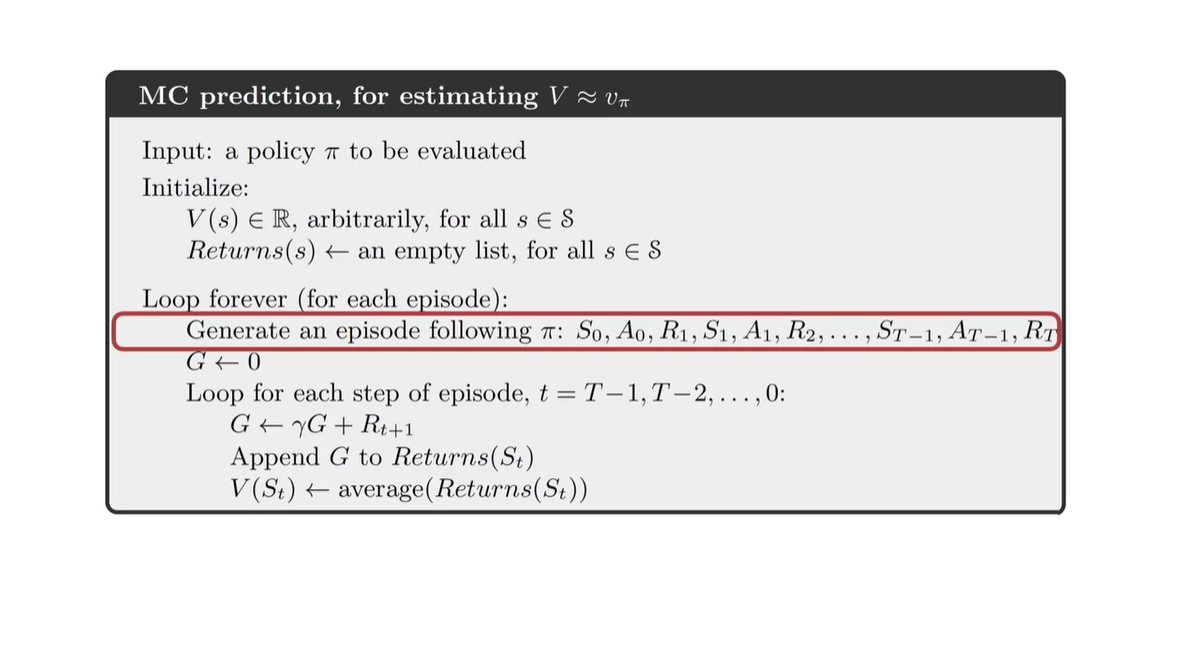
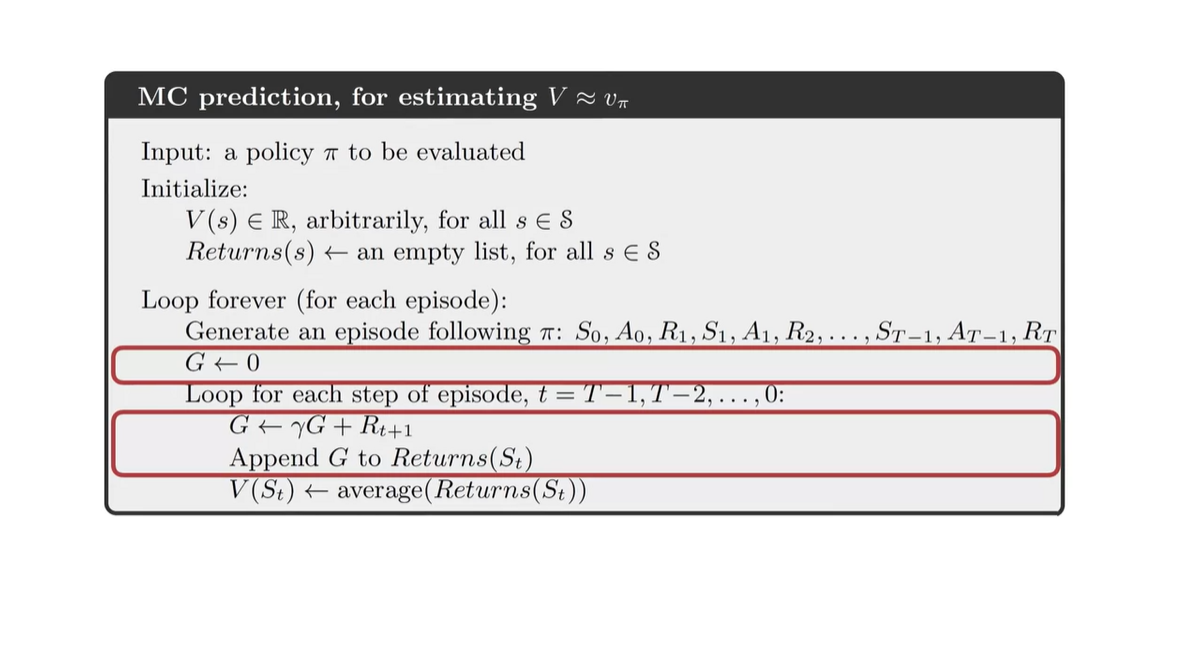
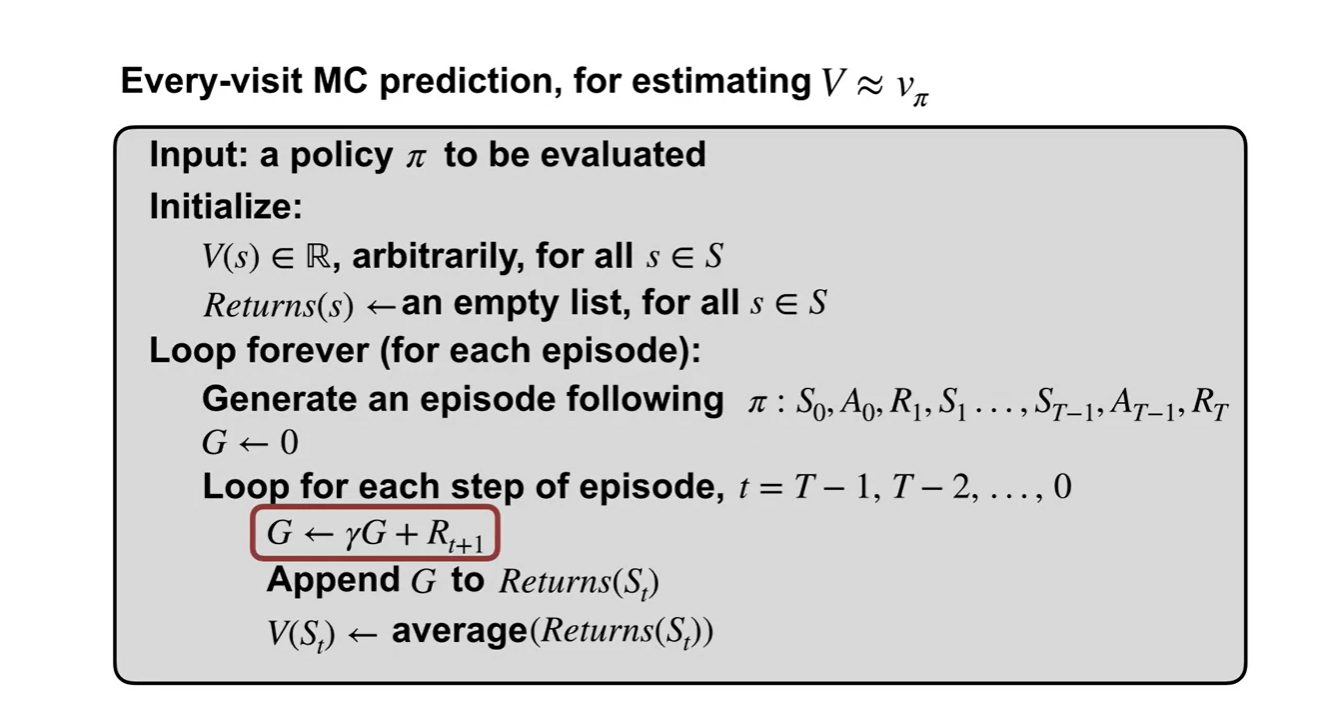
MC prediction 알고리즘의 코드는 아래와 같다.
- Loop를 돌며 S→A→R→S→A를 선택하고, 한 episode step에서 return을 업데이트 한다.
-
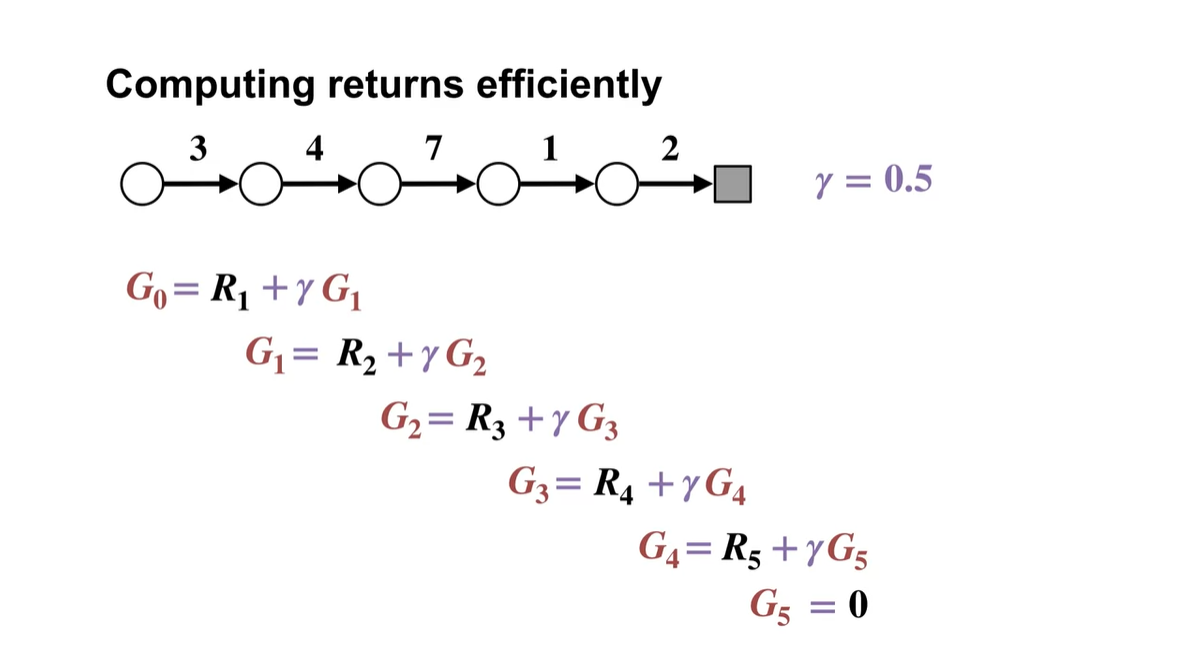
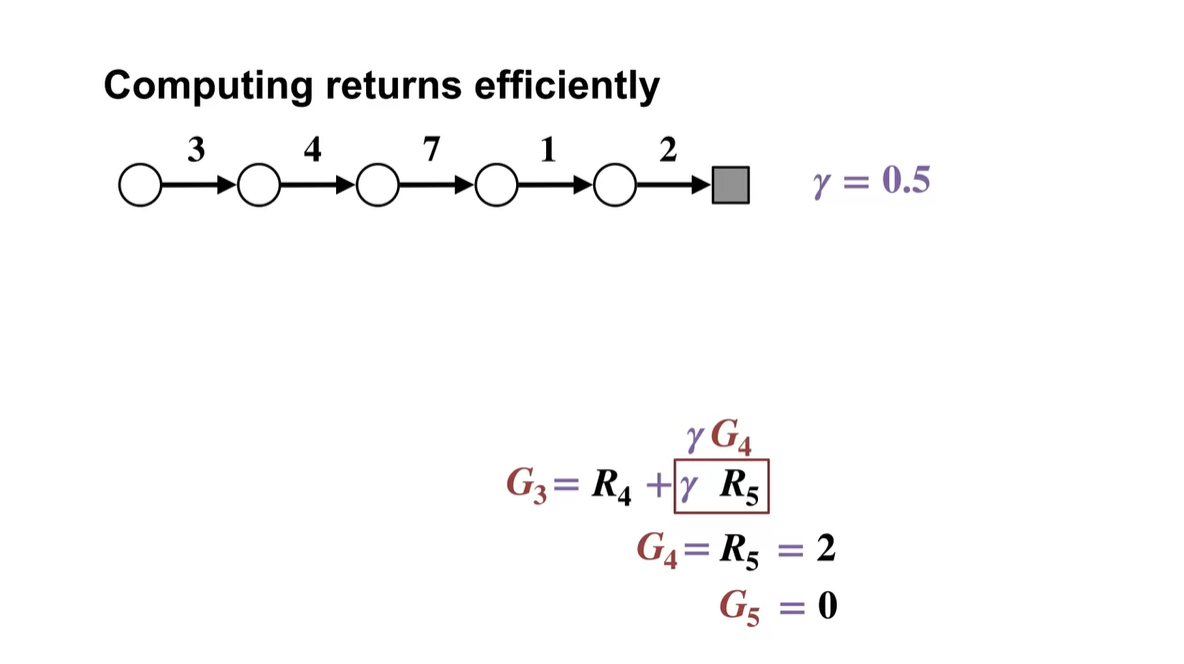
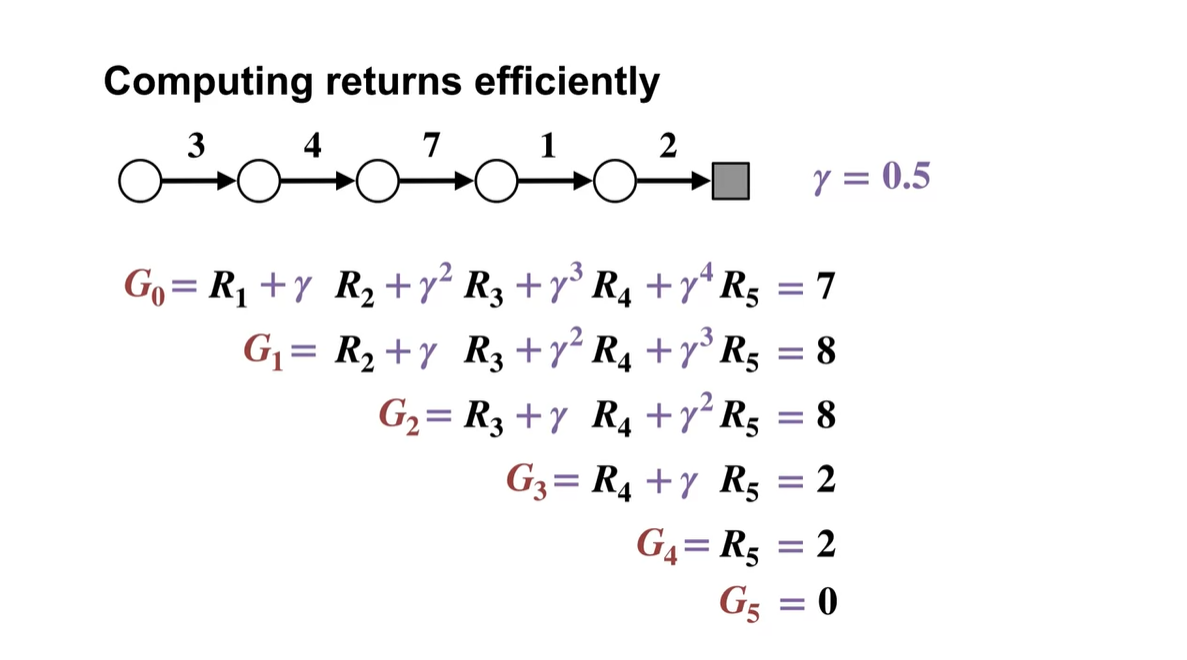
3→4→7→1→2의 reward를 return으로 얻는 방법은 아래와 같이 전개될 수 있다.
- 의 episode state에서 얻어진 reward는 와의 합으로, 는 와의 합으로, ... 이런 식으로 까지 backward로 구한다.
-
이를 와 reward 로 전개해 표현하면 아래와 같아진다.
- 를 벗겨 로 표현하면 한 episode에서의 reward는 이전 rewards를 모두 더해 return으로 얻어낸다는 것을 알 수 있다.
-
MC prediction에서 return을 정의하는 방법은 다음과 같이 를 0으로 initialize하는 것으로부터 출발한다.
- 이전 time step 에서의 return을 항까지 적용하여 모두 더한 return이 로 업데이트 된다.
- Summary
Using Monte Carlo for Prediction
- Monte Carlo for Prediction에 대해 알아보자.

- 이번 강의에서는 Monte Carlo prediction을 활용하여, policy내에서의 value function을 estimate하는 방법에 대해 알아보도록 하겠다.
-
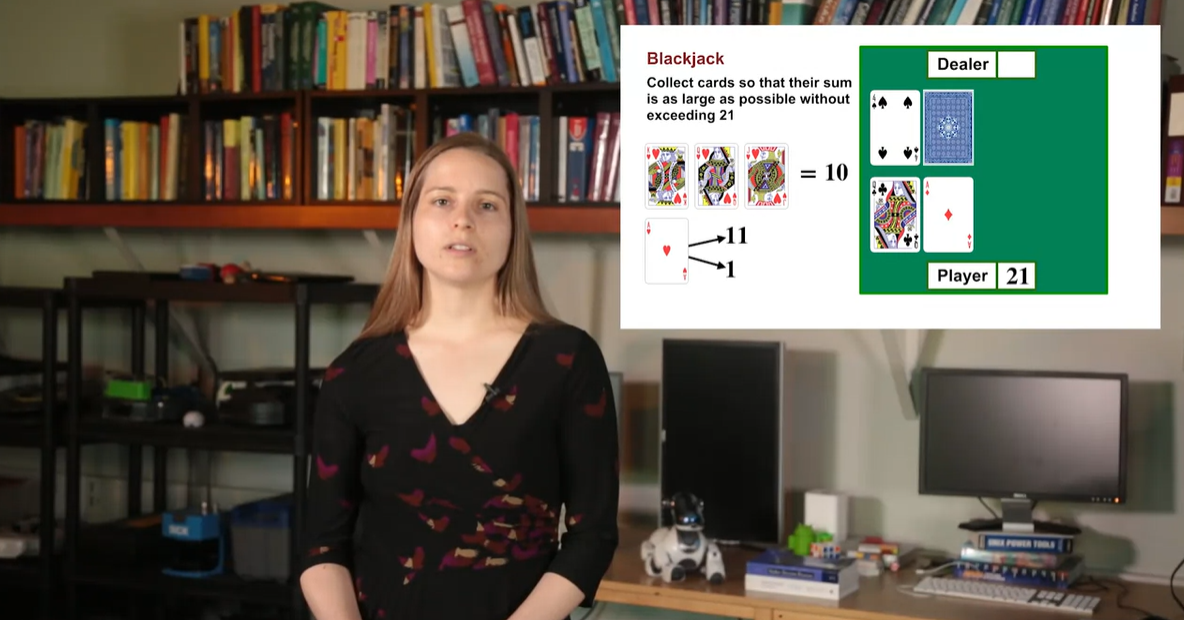
Blackjack 게임은 21의 수를 초과하지 않고 딜러보다 21에 가까우면 이기는 게임이다.
-
Ace는 11과 1로 선택할 수 있으며, player가 21에 도달할 경우 게임은 player의 승리로 끝나게 된다.
- 반면 21을 초과할 경우 곧바로 게임이 끝나고 딜러의 승리로 기록된다.
-
-
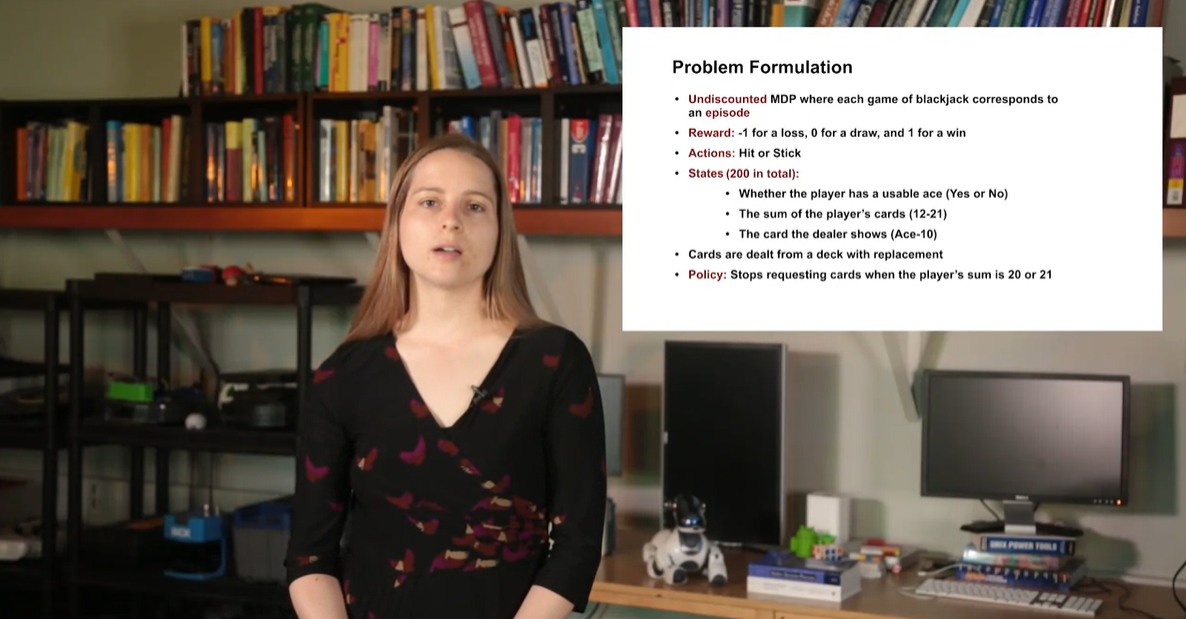
이 게임은 Undiscounted MDP(감쇠되지 않는)로 매번 episode에 도달할 수 있는 system이다.
- Reward와 Action, States, 그리고 Policy 각각의 역할이 아래 설명과 같다.
-
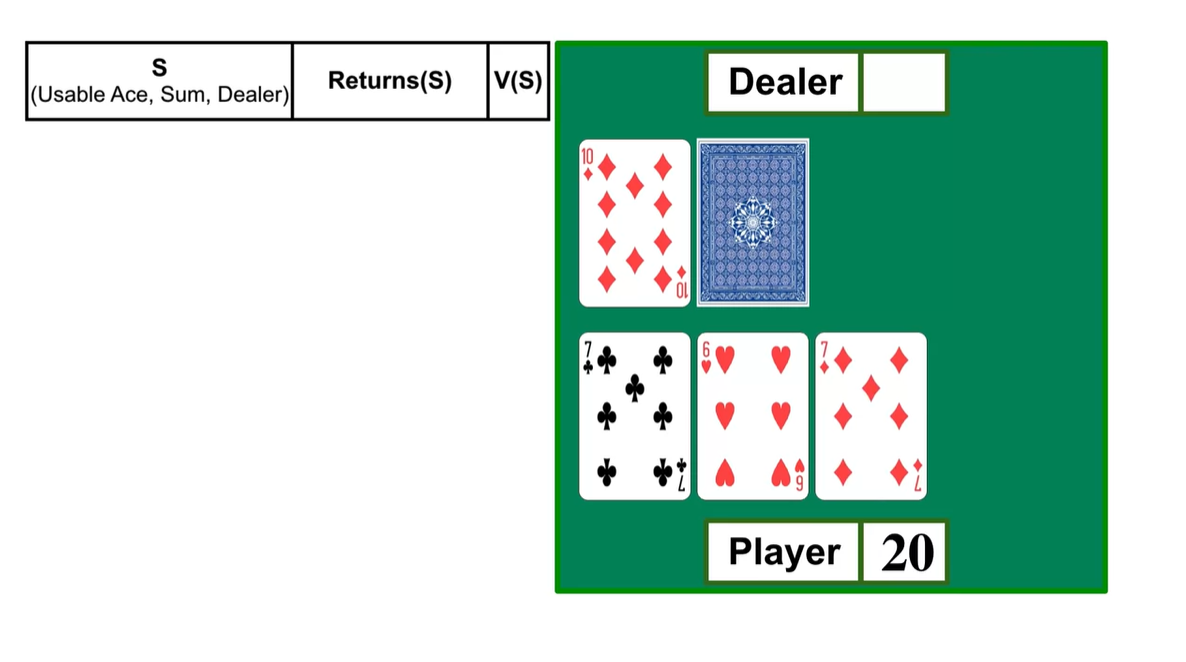
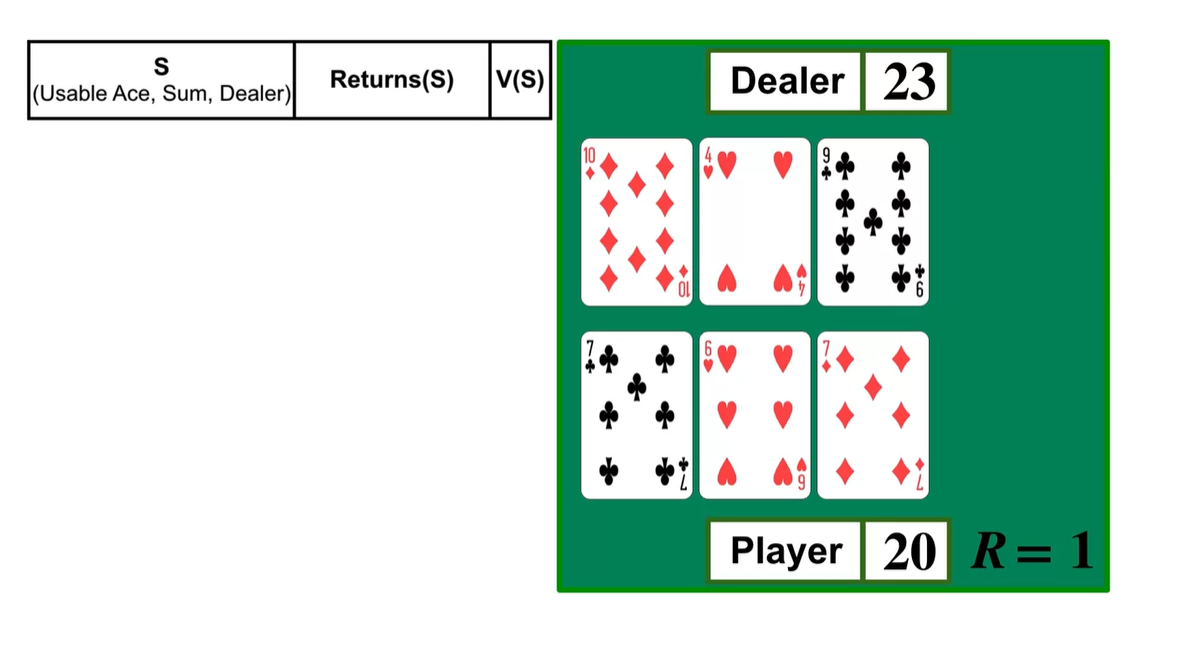
만약 player가 13의 숫자를 가지는 상황에서 한 장을 더 뽑아 20을 만족했다고 해보자.
- 이 때 dealer가 23의 숫자를 가지는 state로 도달하게 되어 player가 이겼다면 Reward 1을 받는다.

-
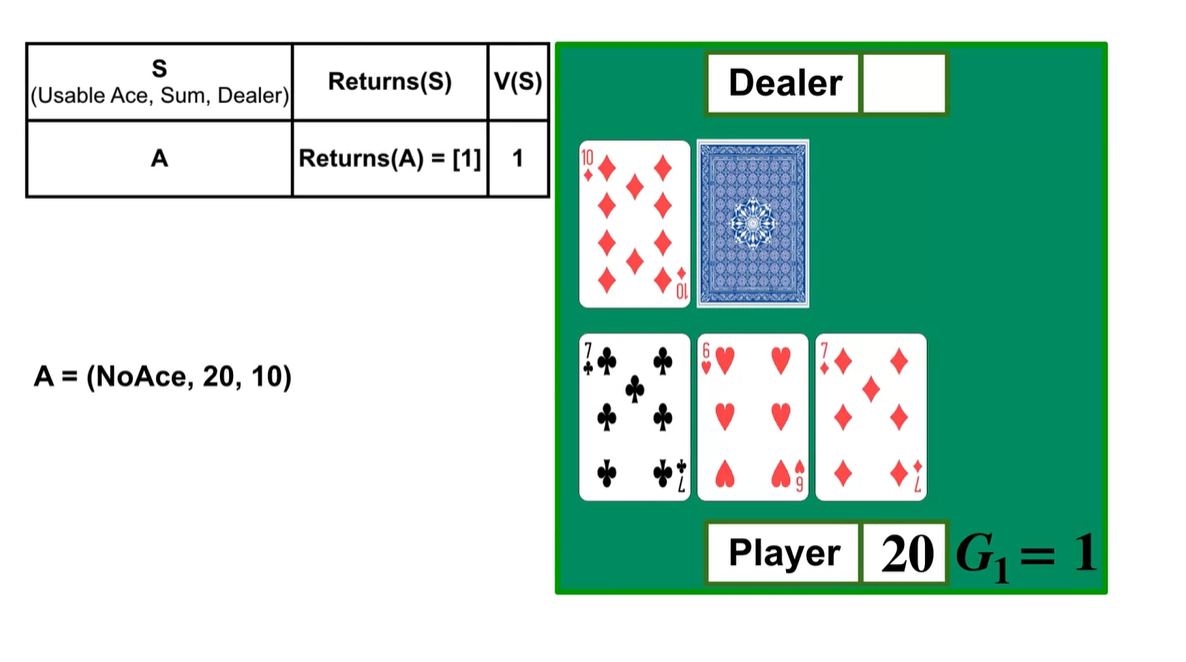
방금 전 상황을 되돌려(Backward) 보자.
- (No Ace, Sum=20, Dealer=10)인 상황에서 얻은 episode reward는 1로 기록된다.
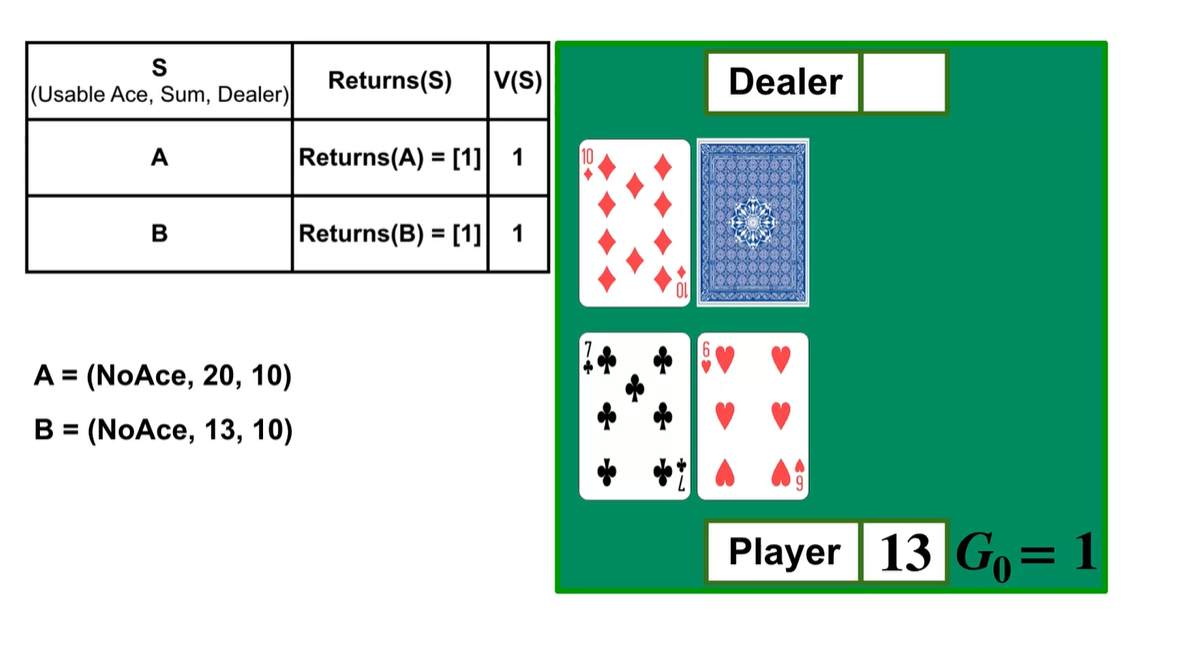
- 그 이전의 상황에서 취했던 action은 (No Ace, Sum=13, Dealer=10)이며, 이 또한 Reward 1을 받은 episode임은 동일하다.
-
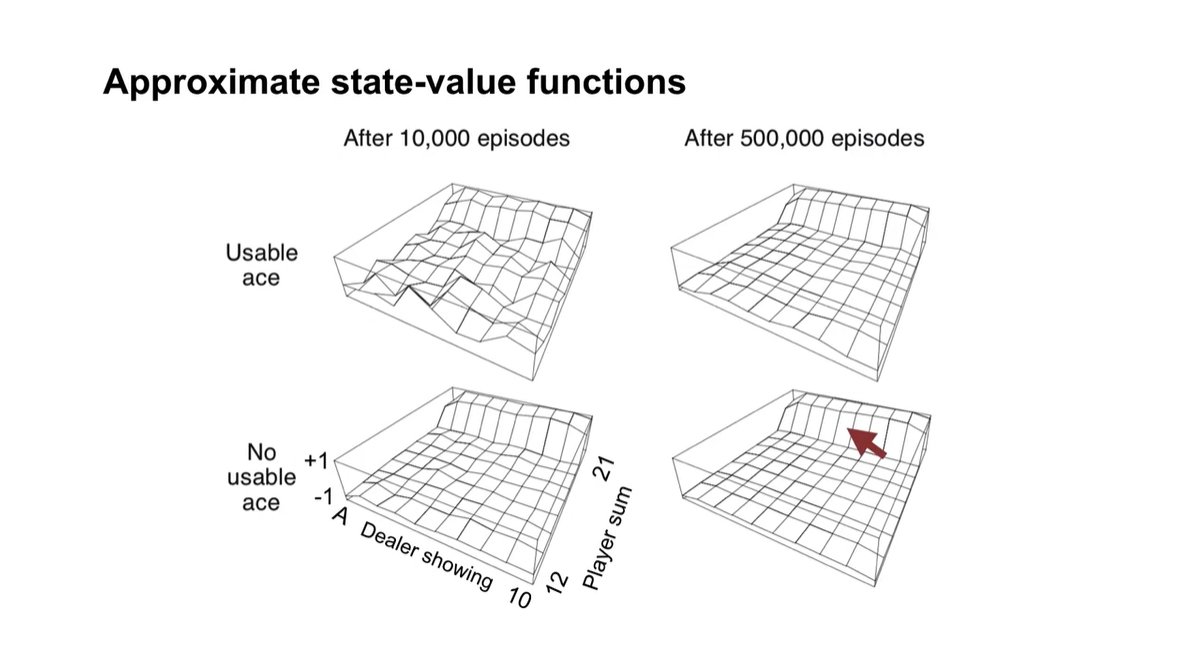
10,000번의 episodes를 경험하여 추정한 state-value functions의 surface와 500,000번의 surface가 아래와 같다.
-
주목할 만한 점은 Ace를 사용할 수 있을 때의 surface가 그렇지 않을 때의 surface보다 좀 더 dynamic하다는 점이다.
-
그리고 player sum이 21에 가까울수록 value 값이 높아지며 episodes가 많을수록 stable한 곡면을 갖는다.
-
-
Monte Carlo learning이 암시하는 바는 다음과 같다.
-
우리는 Monte Carlo Prediction을 통해 매 순간 다른 states를 경험하며 independently하게 value를 estimate할 수 있다.
- 이는 더이상 MDP size 문제로 인해 computation problem을 겪을 필요가 없다는 말이다.
-
- Summary
Monte Carlo for Control
Using Monte Carlo for Action Values
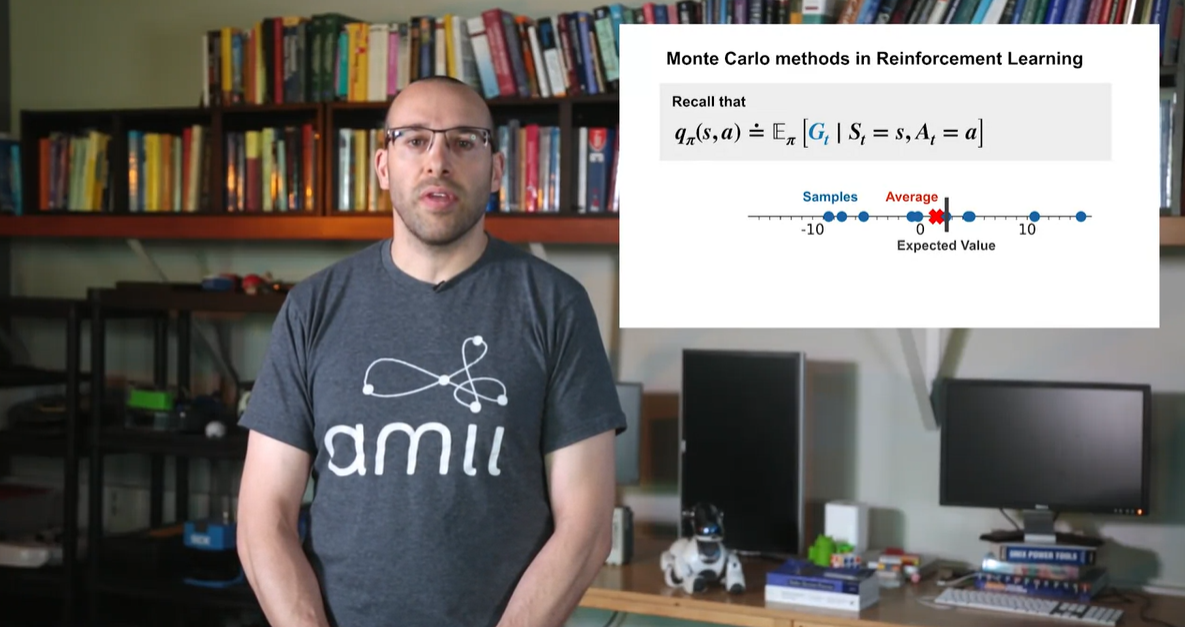
- Action-value의 관점에서 Monte Carlo를 사용해보자.

- 이번 강의에서는 Monte Carlo methods를 활용하여 action-value를 estimate해 보고, exploration을 유지하는 것의 중요성에 대해 다뤄보려고 한다.

- 무수히 많은 sample의 estimated average는 expected value인 에 가까워진다고 했었다.
- 이제 해당 state에서의 action까지 취하도록 하여 action-value를 추산한 결과도 마찬가지임을 보이려 한다.
-
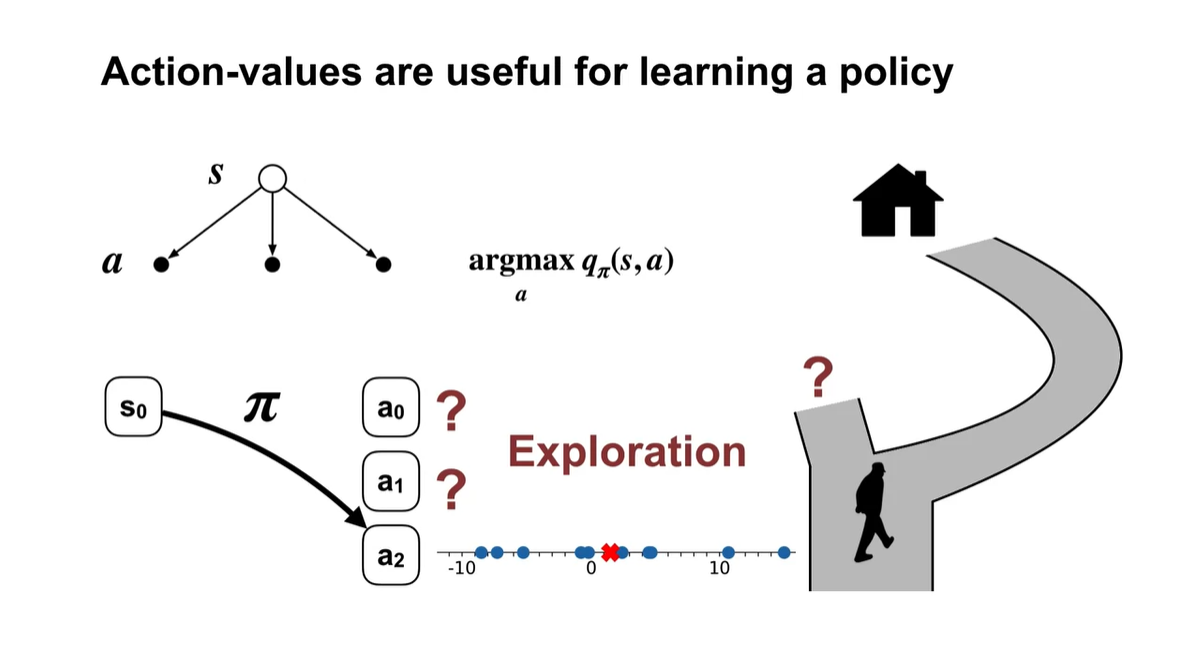
Action-values를 argmax하여 action을 선택하다 보면 policy를 learning하기에 아주 유용한 방법일 수 있다.
-
지금 당장 집을 가기 위해 매일 다니던 길을 선택하면 최단 거리임을 보장할 수가 없다.
- 따라서 새로운 action을 취하는 exploration은 필수로 필요한 과정일지도 모른다.
-
-
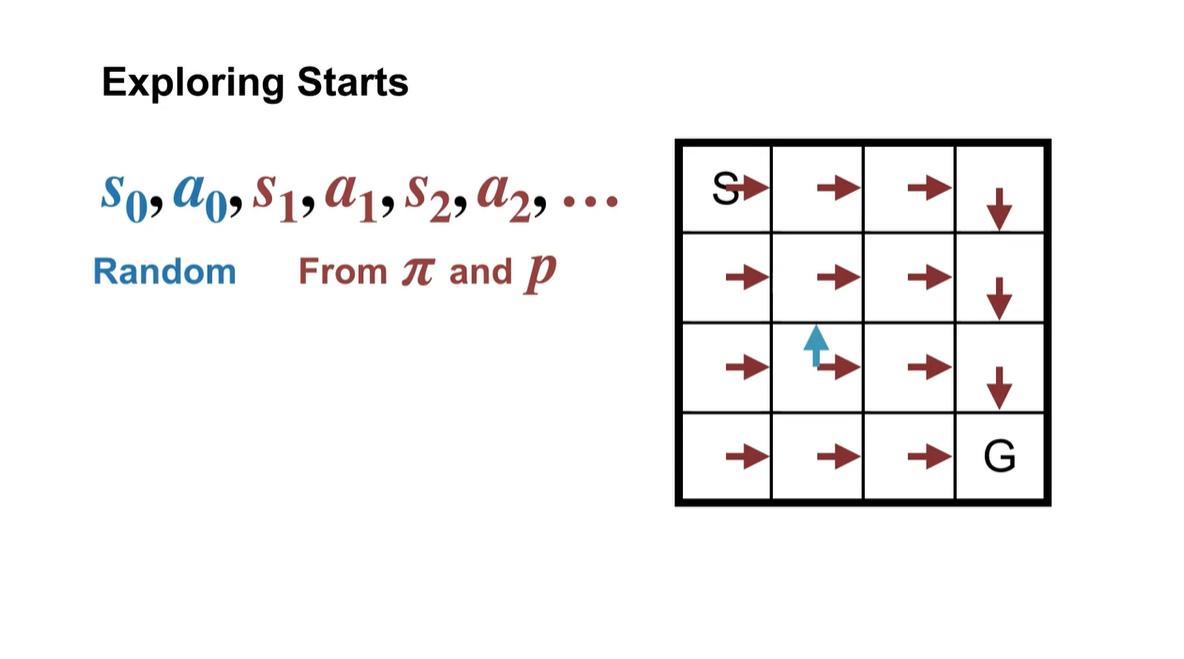
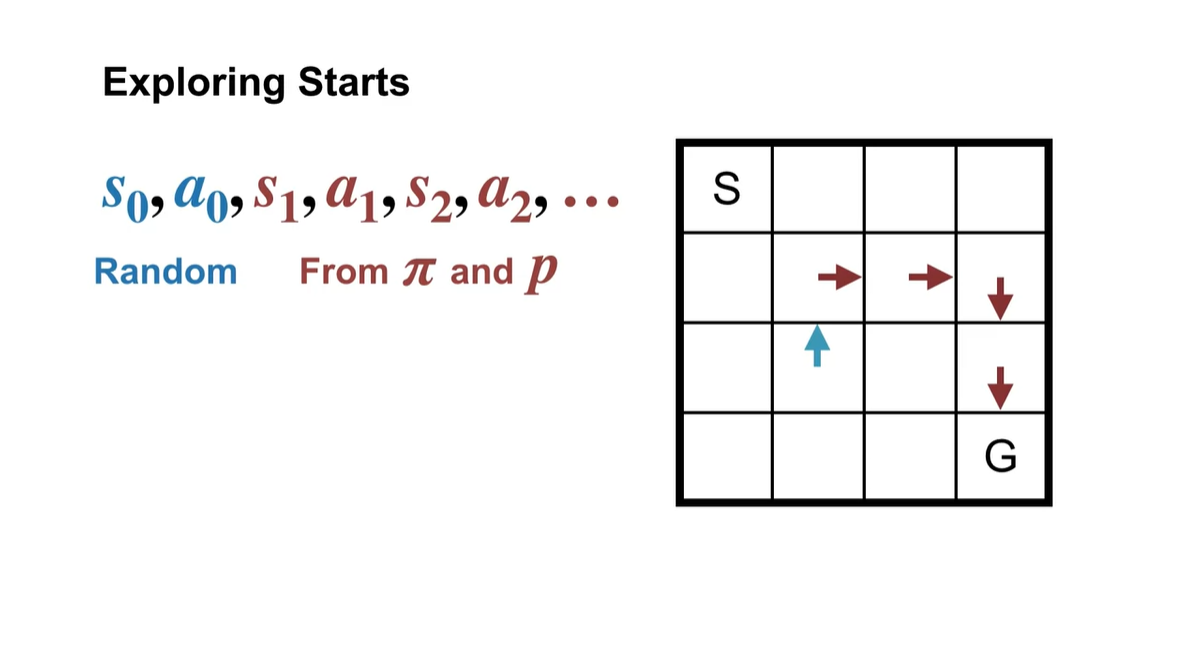
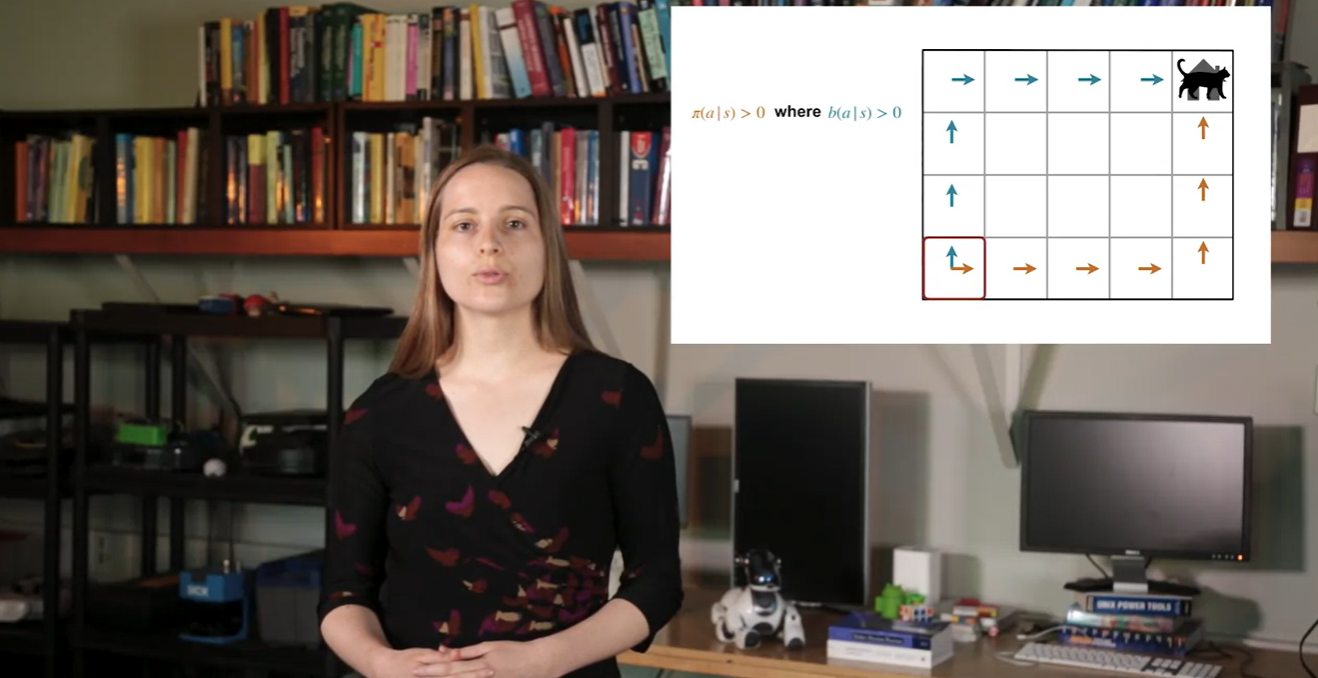
이를 테면 갈색으로 표시된 policy를 따르는 board판이 존재한다고 해보자.
- Initial state 와 initial action인 , 를 파란색이 존재하는 위치와 방향으로 선택한다면 그 다음 state 및 action은 어떻게 변화할까?
-
다음과 같이 board의 기존 policy를 따르는 방향대로 흘러갈 것이다.
- 이러한 상황 자체가 하나의 episode 역할을 하는 것이다.
- Summary
Using Monte Carlo methods for generalized policy iteration
- 이제 Monte Carlo mathods를 사용한 generalized policy iteration을 정의해보자.
- 이번 강의에서는 Monte Carlo mathods를 활용한 generalized policy iteration 알고리즘에 대해 다룬다.

-
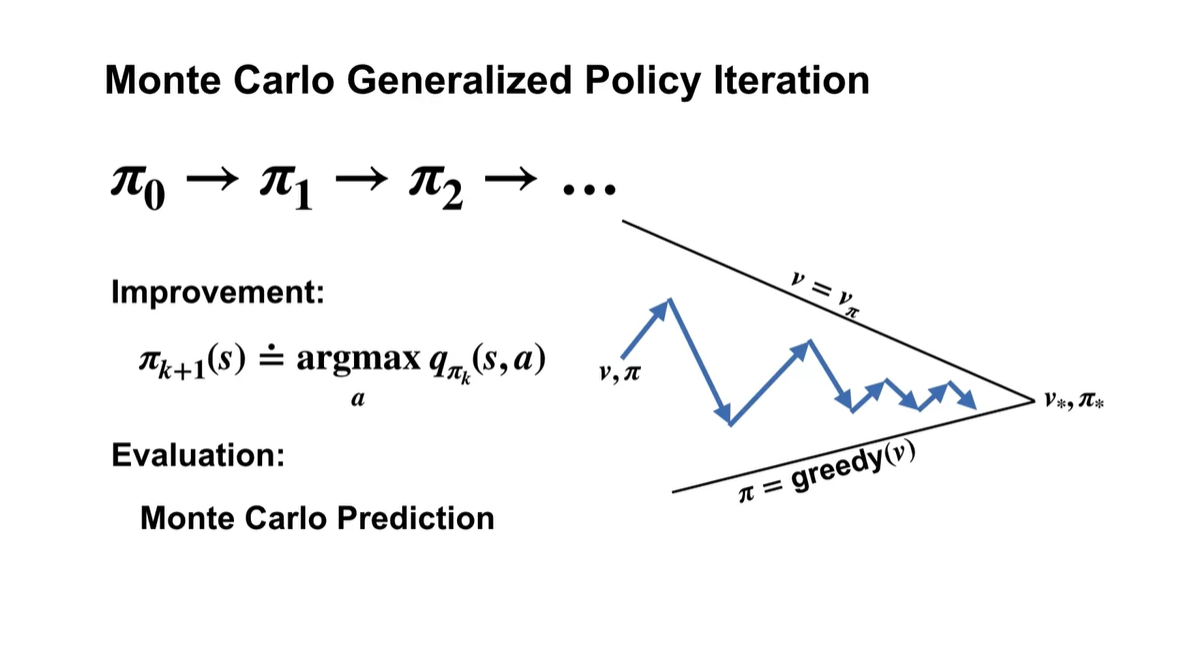
Generalized policy iteration은 k번째 action-value를 argmax 취하여, k+1번째에서의 policy 를 improve하는 과정을 말한다.
- 이 때 optimal value & optimal policy로 향하도록 하는 policy & value evaluation을 Monte Carlo Prediction으로 수행하는 것이다.
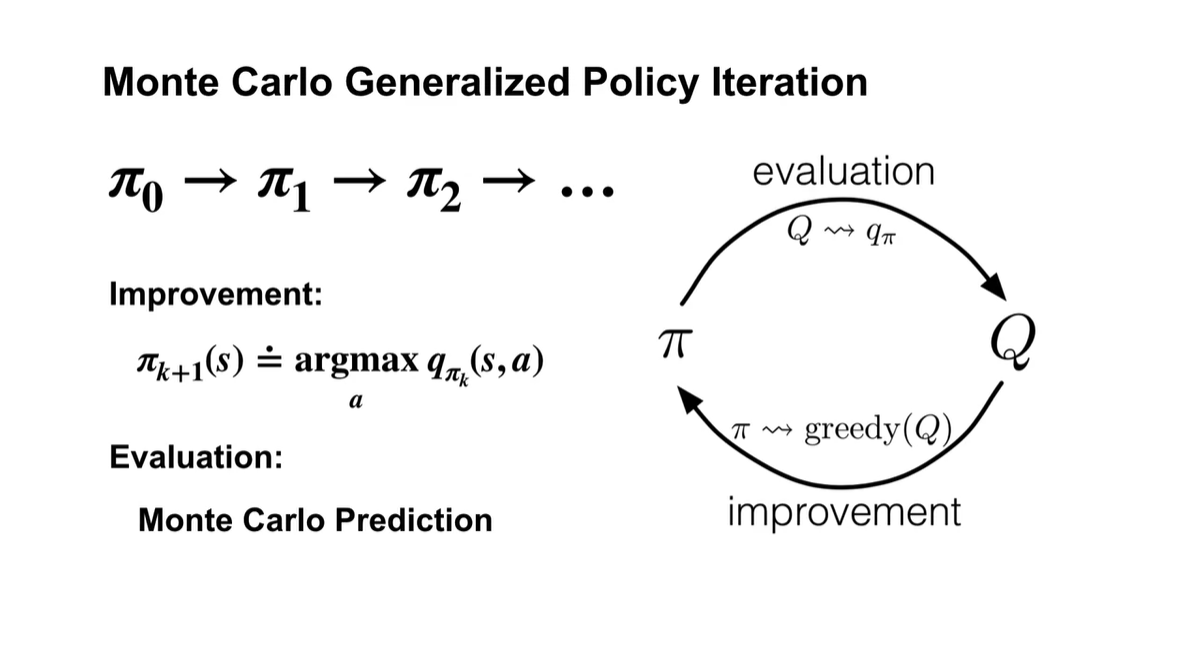
- 매 순간 value 및 policy가 optimal을 향할 수 없기에, 적절한 sampling으로 계산한 경험적 가치를 통해 업데이트 하는 방법론인 것 같다.
-
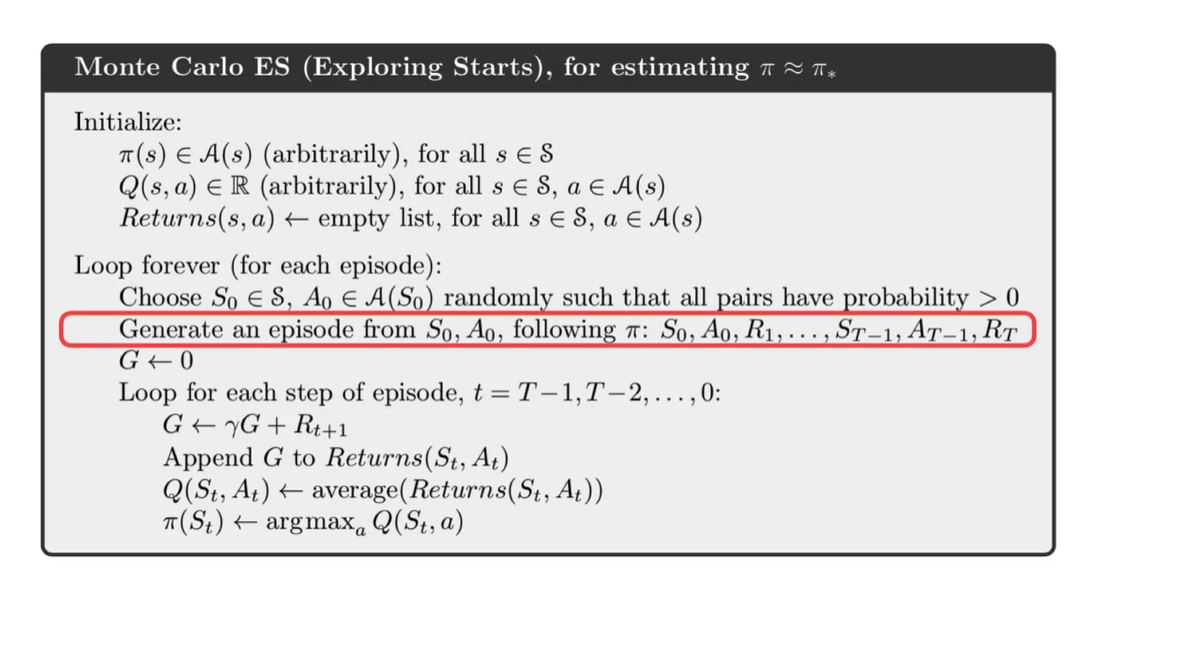
이 알고리즘의 전체적인 로직은 아래와 같다.
- Random하게 initial state 와 를 sampling하는 과정이 특징적인 부분에 해당한다.
- Summary
Solving the Blackjack Example
- Blackjack Example을 푸는 방법에 대해 생각해보자.

- 이번 강의에서는 exploration starts를 활용하여 blackjack과 같은 MDP 문제를 푸는 과정에 대해 알아보려 한다.
-
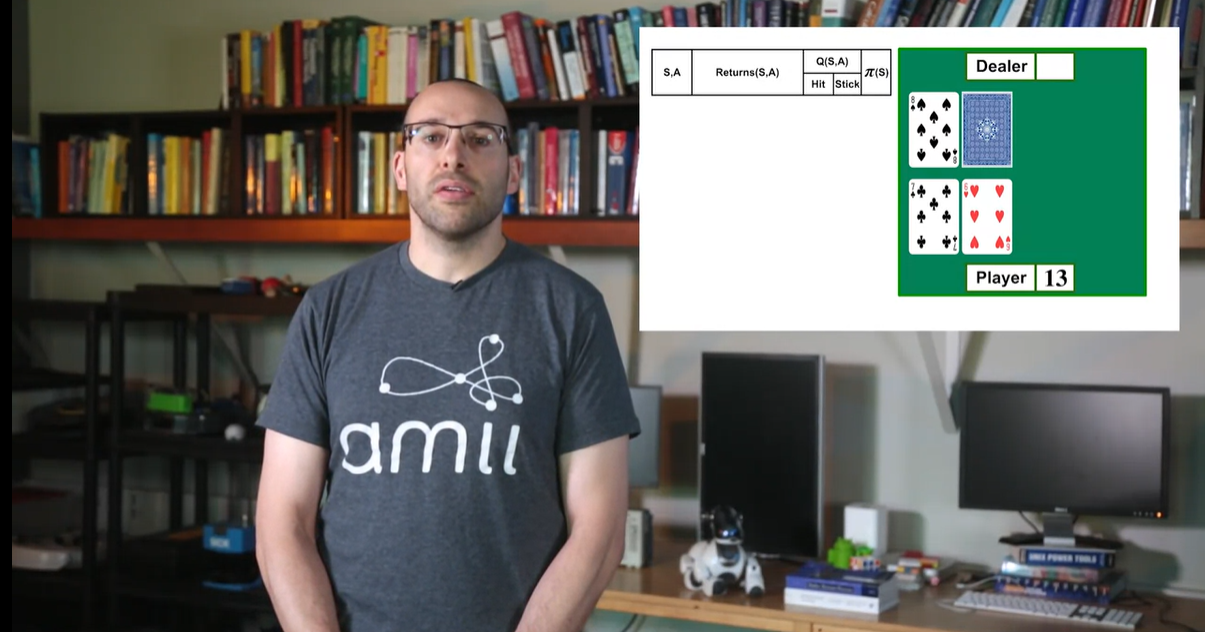
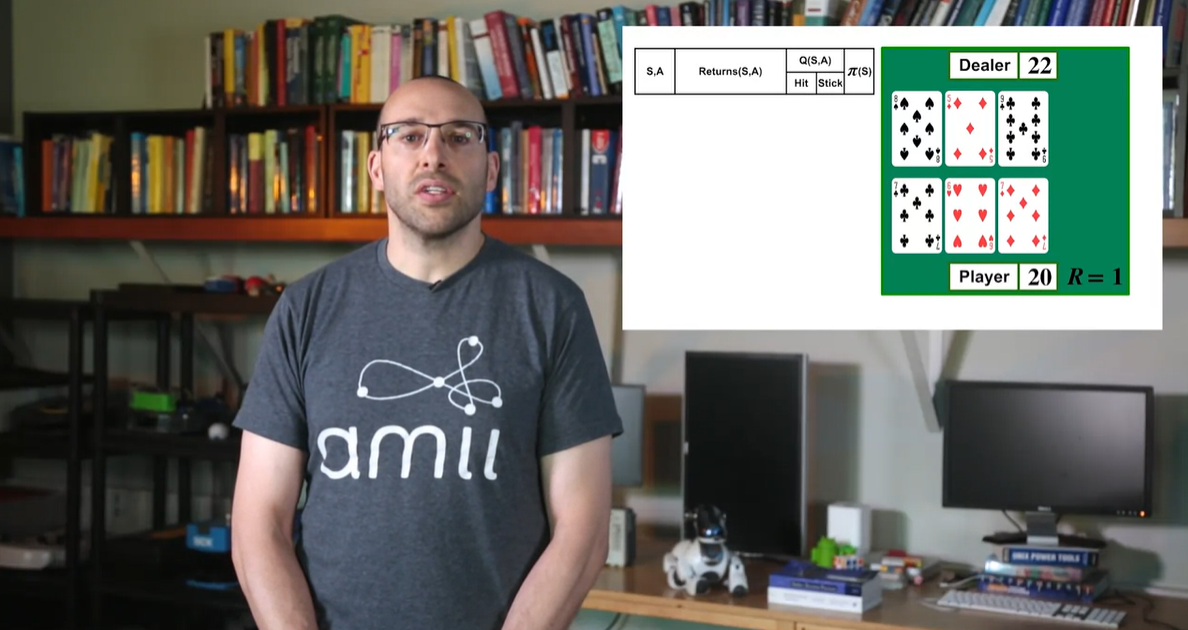
현재 player는 13의 결과값을 가지고, dealer는 8의 결과를 가지고 있다.
- 이 상태에서 Hit(한 장 더)과 Stick(건너뜀) 중 하나의 action을 취하여 episode를 이어가 보자.
- 21에 더 가까워지기 위해 Hit을 선택하였더니 player의 최종 점수가 20으로 업데이트 되었다.
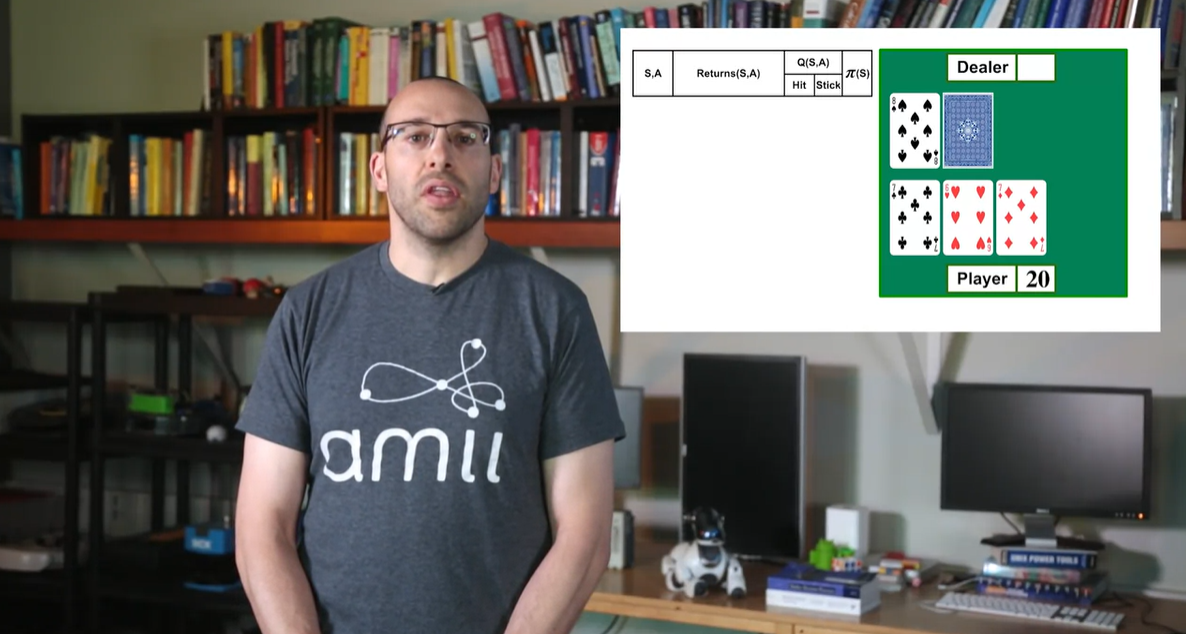
-
이제 dealer의 차례가 되어 카드를 한 장 뽑았더니 dealer가 22의 값을 갖게 되었다.
- Player가 21에 더 가까우면서 dealer가 21을 초과하는 값이 되어버렸기 때문에, 게임은 즉시 player의 손을 들어주며 종료된다.
-
이제 다시 backward로 향하며 value를 역으로 계산해 나가 보자.
- Player가 20인 상황에서 Stick을 선택했기 때문에 게임을 이길 수 있었으므로 Stick 선택지에 Reward 1를 적는다.
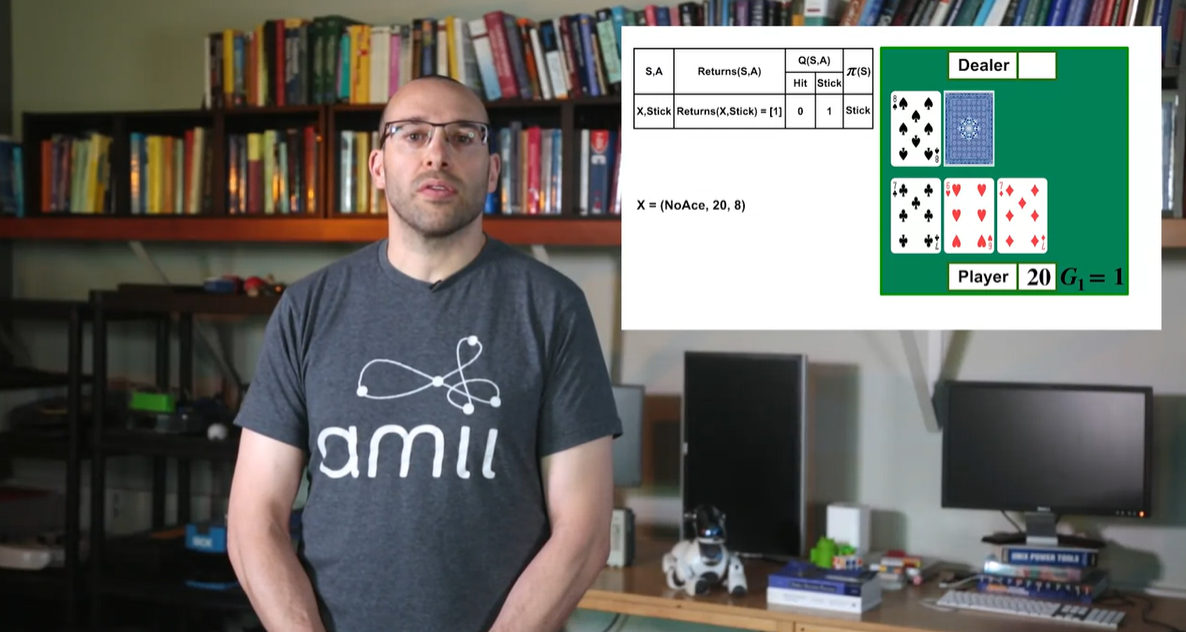
-
Player가 13인 상황에서는 Hit을 선택했기 때문에 게임을 (전체적으로) 이길 수 있었으므로 Hit 선택지에 Reward 1을 적는다.
- Greedy action이 Hit인 상황인 것이다.
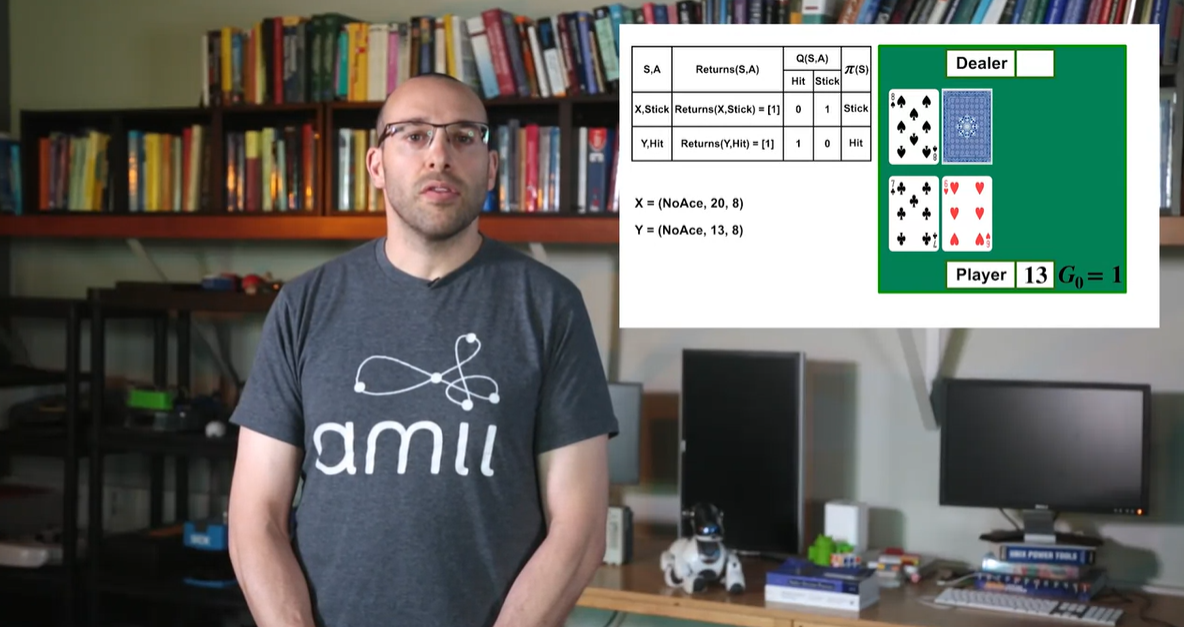
-
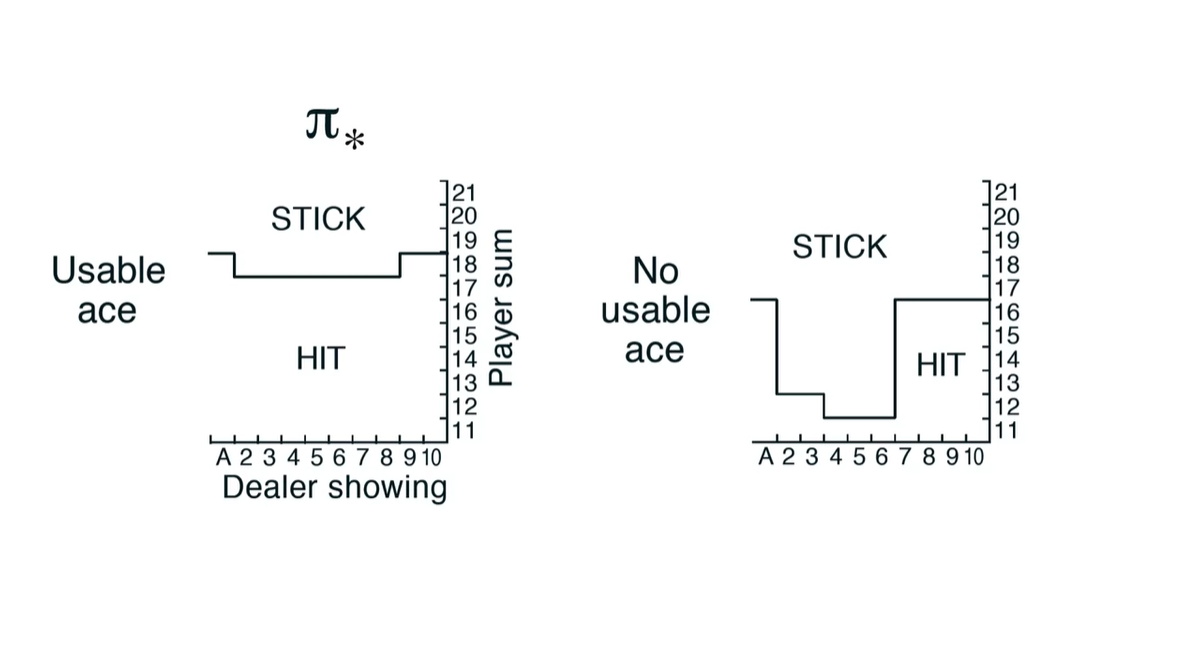
Ace를 사용할 수 있는 상황과 그럴 수 없는 상황에서의 action 선택지로 policy를 유추해보자.
-
Ace가 존재하는 상황에서는 Hit 선택지의 action probability 가중치가 그렇지 않을 때의 상황에 비해 높다.
- 즉, Ace가 11 혹은 1의 값으로 대체될 수 있다는 경우의 수가 어느 정도 Hit 선택지의 자신감을 심어준 것인가..?
-
- Summary
Exploration Methods for Monte Carlo
Epsilon-soft policies
- Epsilon-soft policies에 대하여 알아보자.
-
이번 강의에서는 exploring을 수행하기 위한 시작 지점을 현실에서는 알아낼 수 없다는 점에 대해 주목한다.
- Monte Carlo control에서 exploration을 어떻게든 수행하기 위한 alternative method인 -soft policy 방법론에 대해 알아보도록 하자.
-
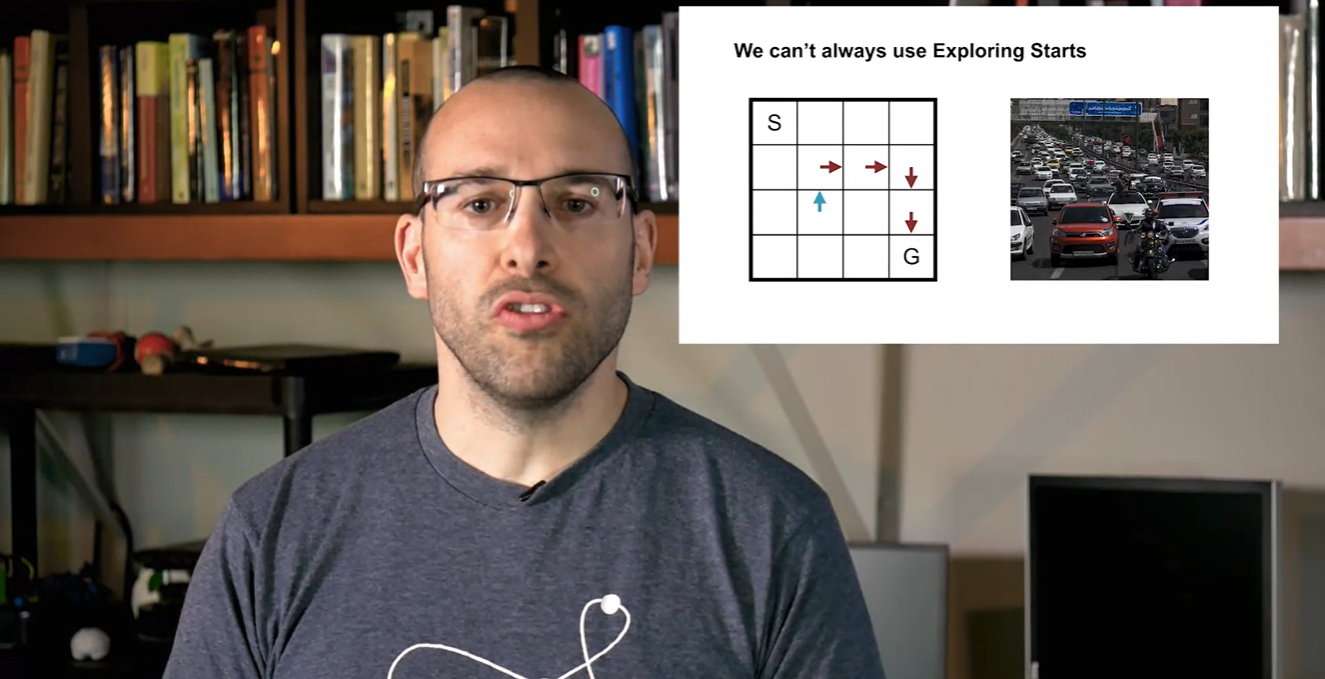
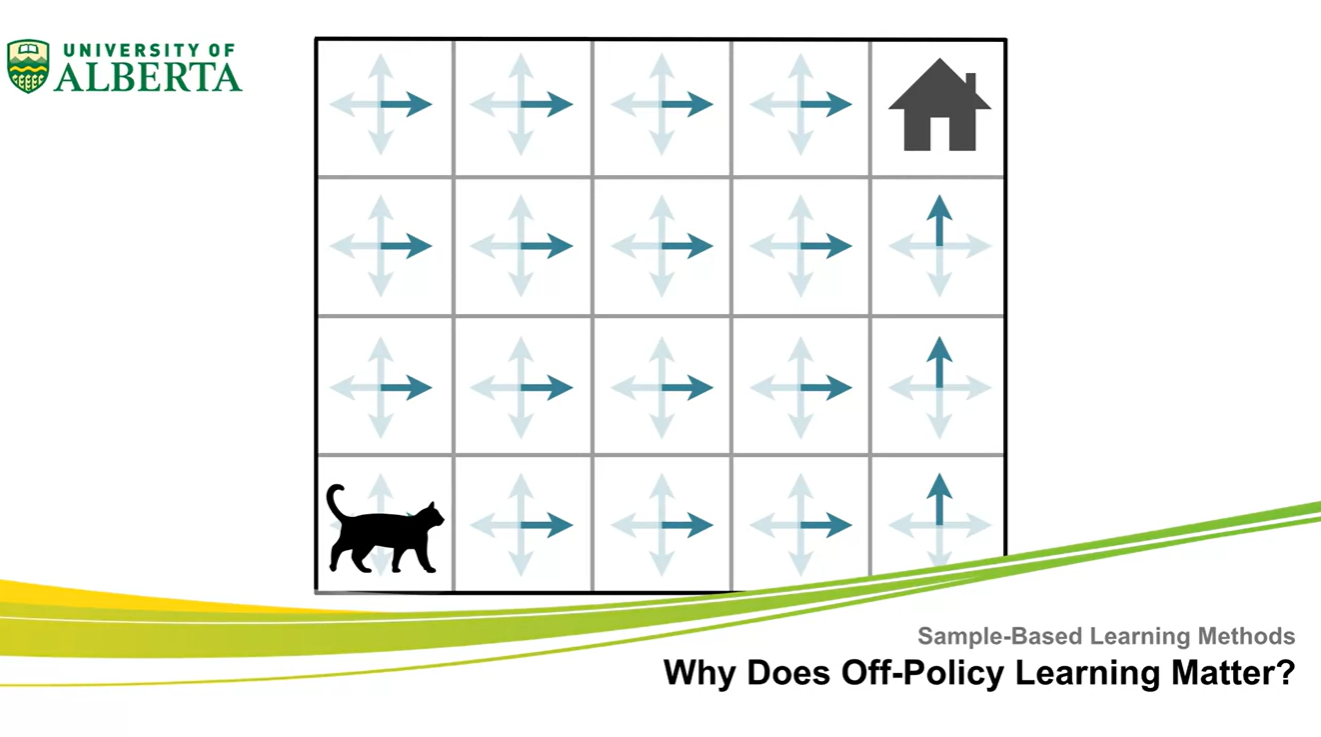
위에서 보았던 board판 내에서의 움직임은 Start 지점을 initialize하여 exploration할 수 있는 MC control이었다.
- 그러나 driving car에서의 상황과 같은 현실 세계에서의 문제들은 시작 지점을 설정하기가 매우 어렵다.
-
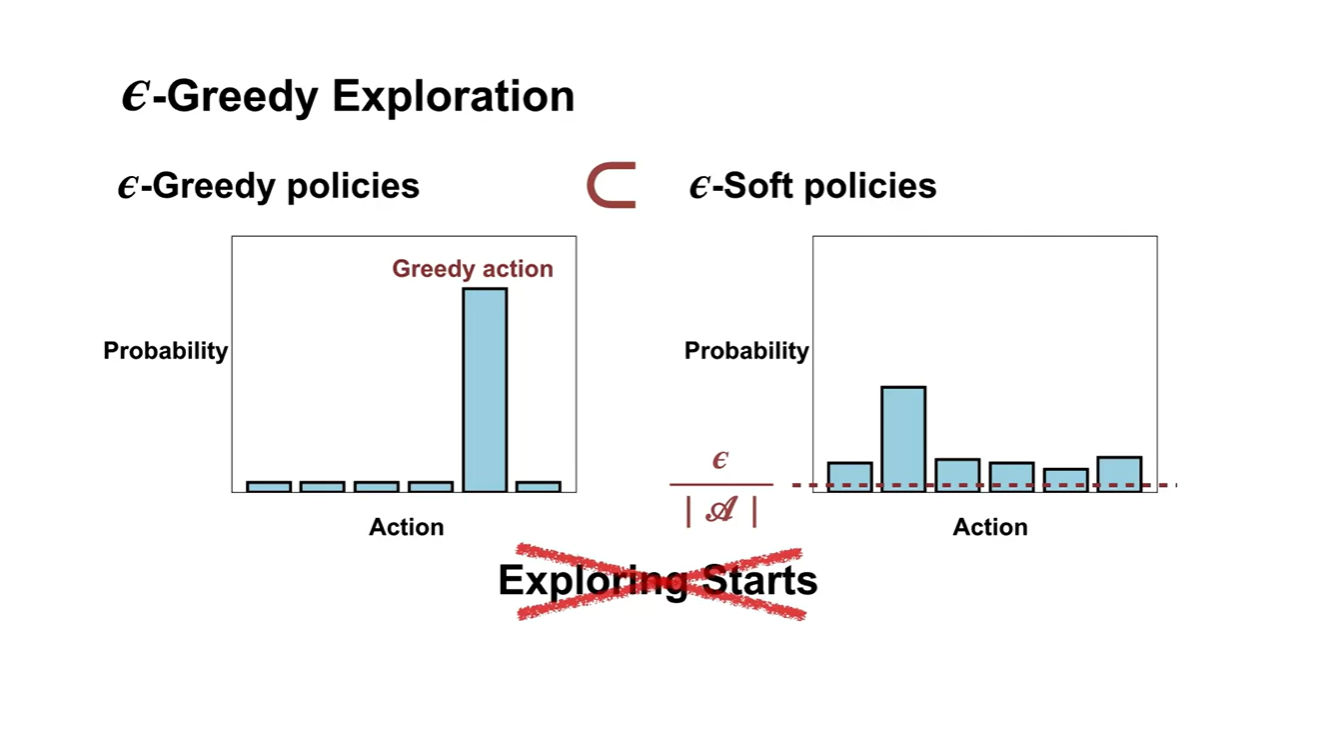
그래서 나온 방법론이 바로 -Soft policies control이다.
- Exploring starts를 설정하지 못할 때 사용되는 방법론으로, 지금까지 greedy하게 선택했던 방법론이 -Soft policies에 포함된다고 보면 된다.
-
-Soft policies에서는 policy 를 stochastic하게 바라본다.
- Action에 대한 선택지를 값을 설정하여 미세하게 더 탐색할 수 있도록 말이다.
-
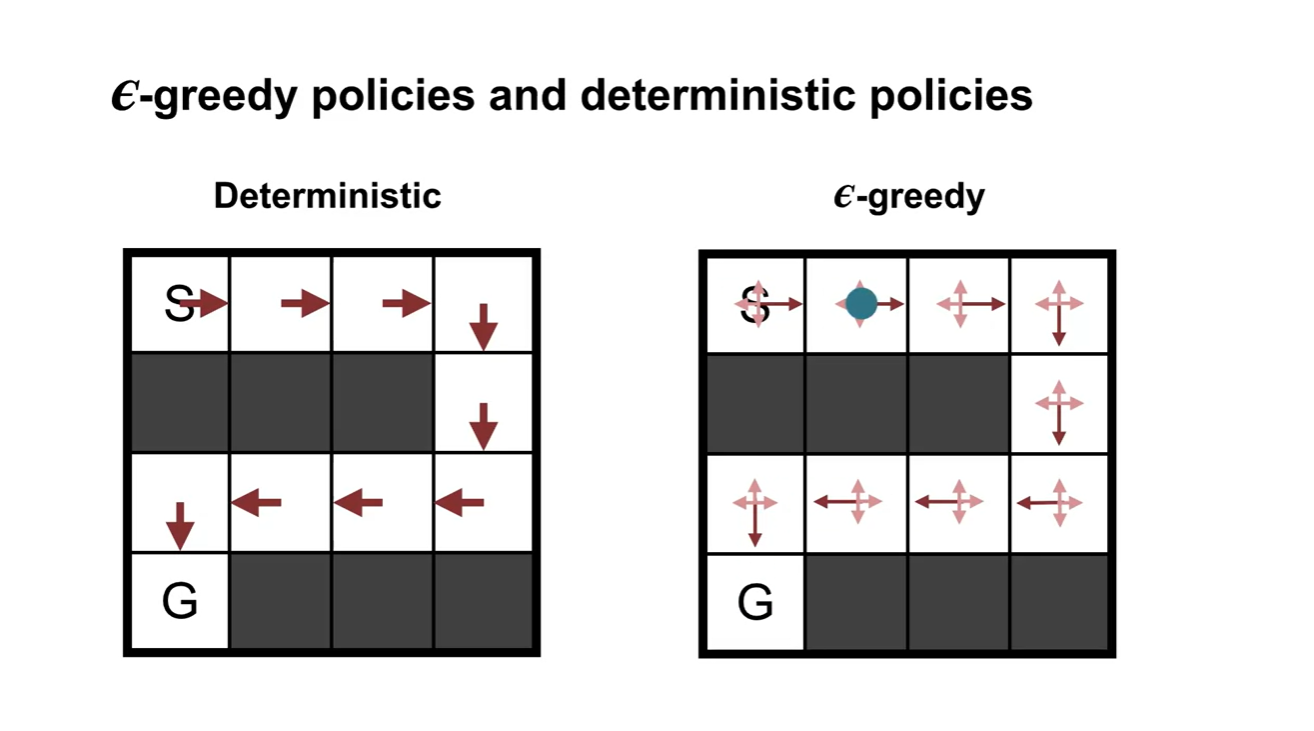
기존 Deterministic한 방법론과 -greedy 방법론의 차이는 아래와 같다.
- Deterministic은 policy 경로가 매우 hard하게 정해져있는 반면, -greedy는 만큼의 미세 조정으로 다른 경로로 갔다가 돌아오기도 하는 선택을 하도록 만든다.
-
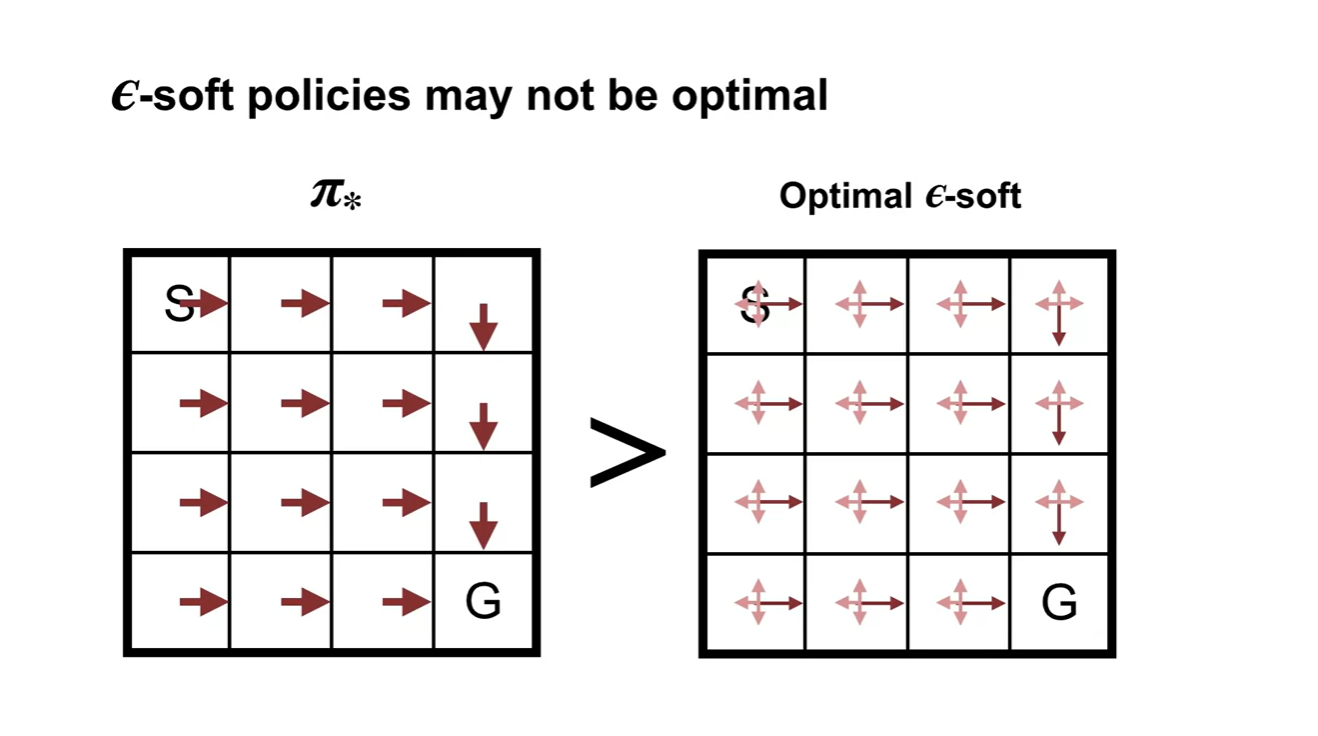
-Soft policies를 따르는 optimal policy는 기존 optimal policy 에 비해 soft하다.
- 실제 optimal policy가 아닐 수도 있으나, exploration의 관점에서는 선택지를 확률적으로 더욱 넓힐 수 있다는 장점이 존재한다.
-
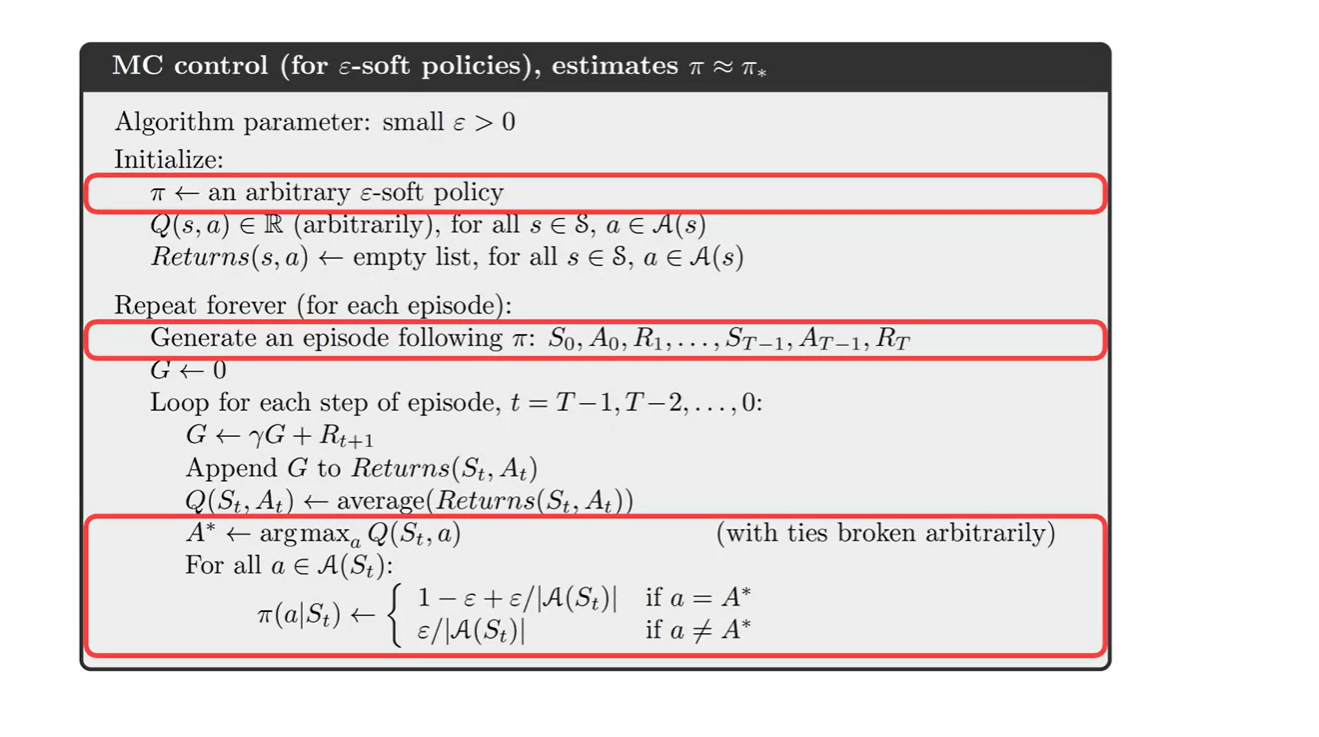
-Soft policies를 따르는 MC control의 알고리즘이다.
- 에 distribution을 initialize하여 할당하고, 값에 따라 적절히 다른 선택을 하도록 유도하는 알고리즘이다.
- Summary
Off-policy Learning for Prediction
Why does off-policy learning matter?
- 이번에는 off-policy learning과 on-policy learning에 대해 비교 및 정리한다.
- 이번 강의에서는 off-policy learning을 이해하고, target policy와 behavior policy에 대해 구분짓게 될 것이다.

-
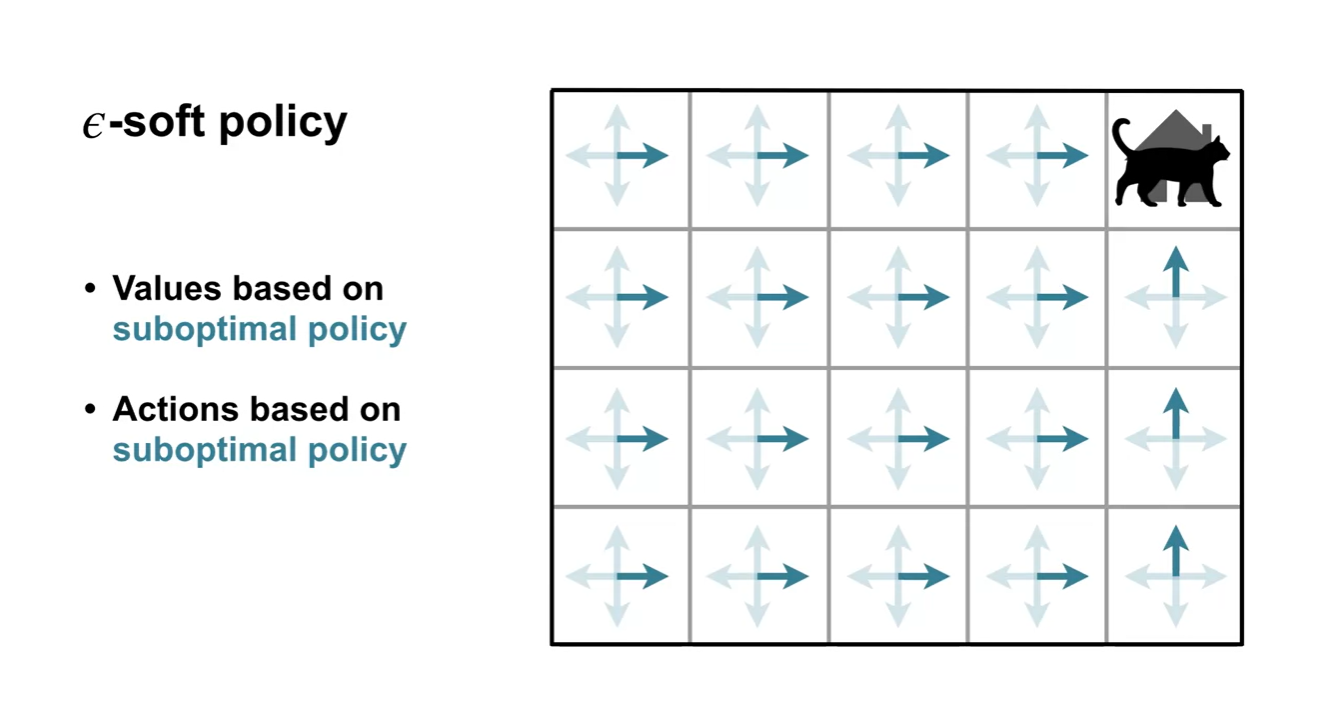
-soft policy는 suboptimal policy를 따르는 Values와 Actions를 활용한다.
- 따라서 최적의 정책(optimal policy)이 아니라는 단점이 존재한다.
-
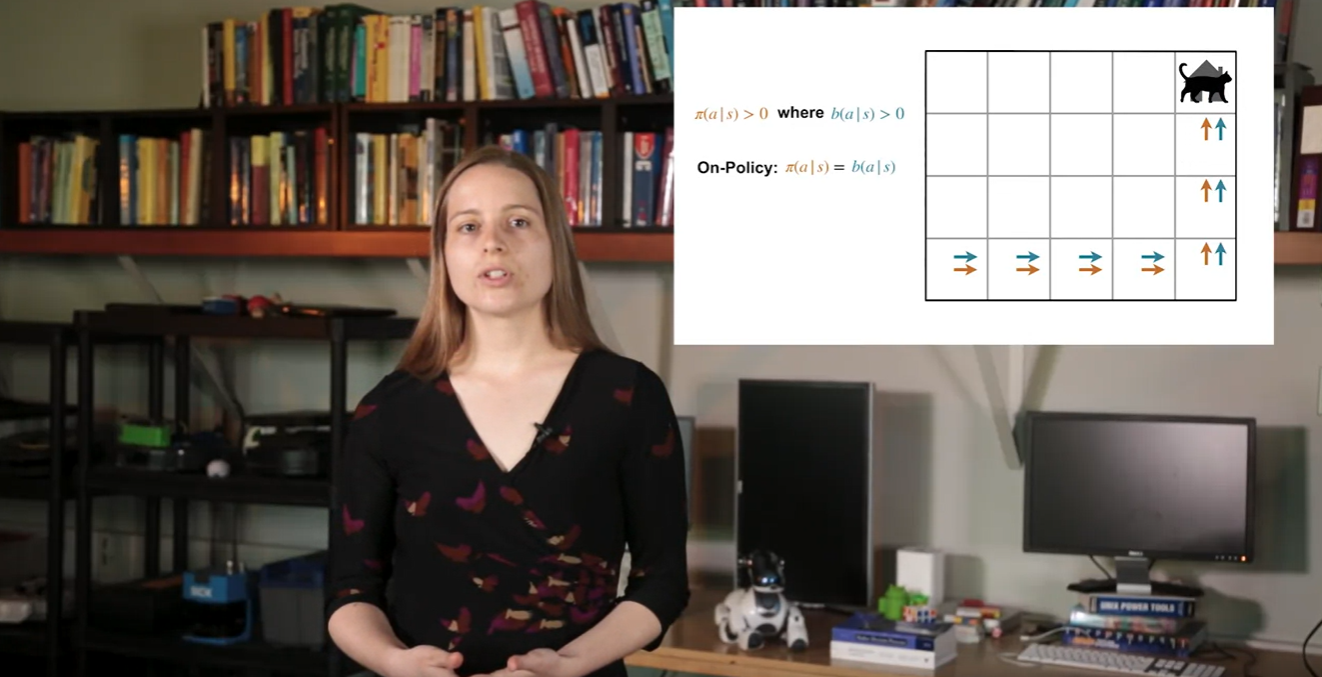
지금까지 배웠던 내용은 사실 On-policy를 따르는 방법론에 대해 소개한 것이다.
-
On-policy는 optimal policy를 찾기 위해 value function을 이용하여 evaluation하고 improve(by selected action)하는 과정이었다.
-
Off-policy는 "다른" policy를 따를 때 생성되는 데이터를 통해 policy를 학습한다는 점에서 차이를 갖는다.
- 즉, uniform distribution policy 내에서 action을 random하게 선택하도록 하여 optimal policy를 찾는 방법론이라 볼 수 있다.
-
-
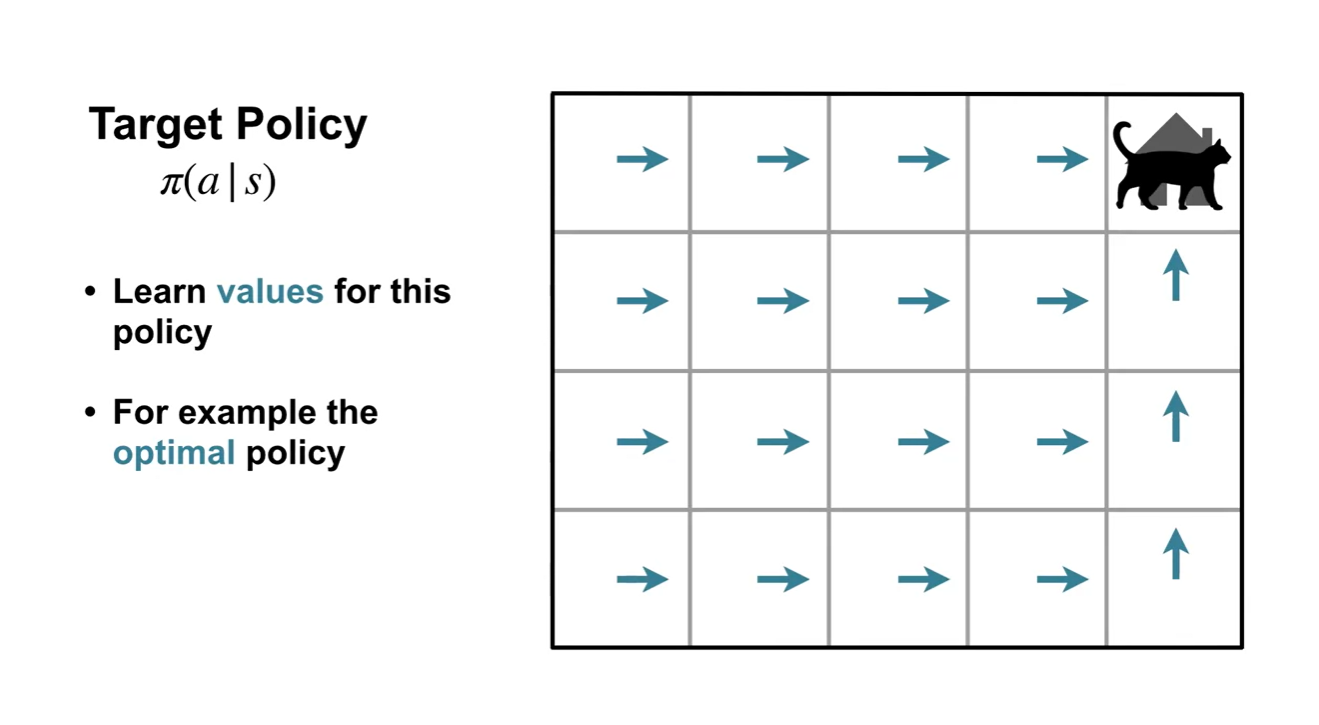
Target policy 는 Agent가 학습하는 policy를 대상으로 한다.
-
Agent가 학습하는 value function은 대상 policy를 기반으로 한다.
- 예를 들어, Agent가 action을 선택하는 데 사용하는 optimal policy를 말할 수 있다.
-
-
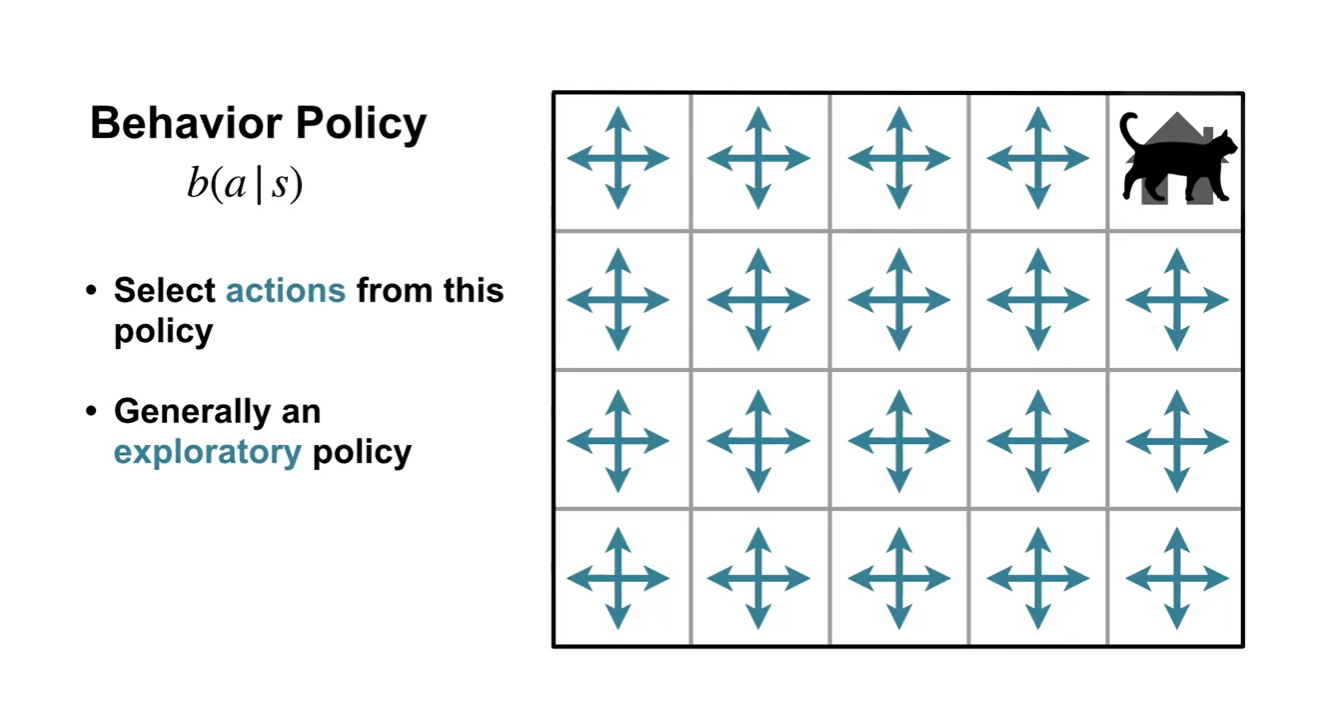
Behavior policy 는 Agent가 action을 선택하도록 하는 역할을 한다.
- Exploratory policy 즉, uniform distribution을 따르는 policy로 설정할 수 있다.
-
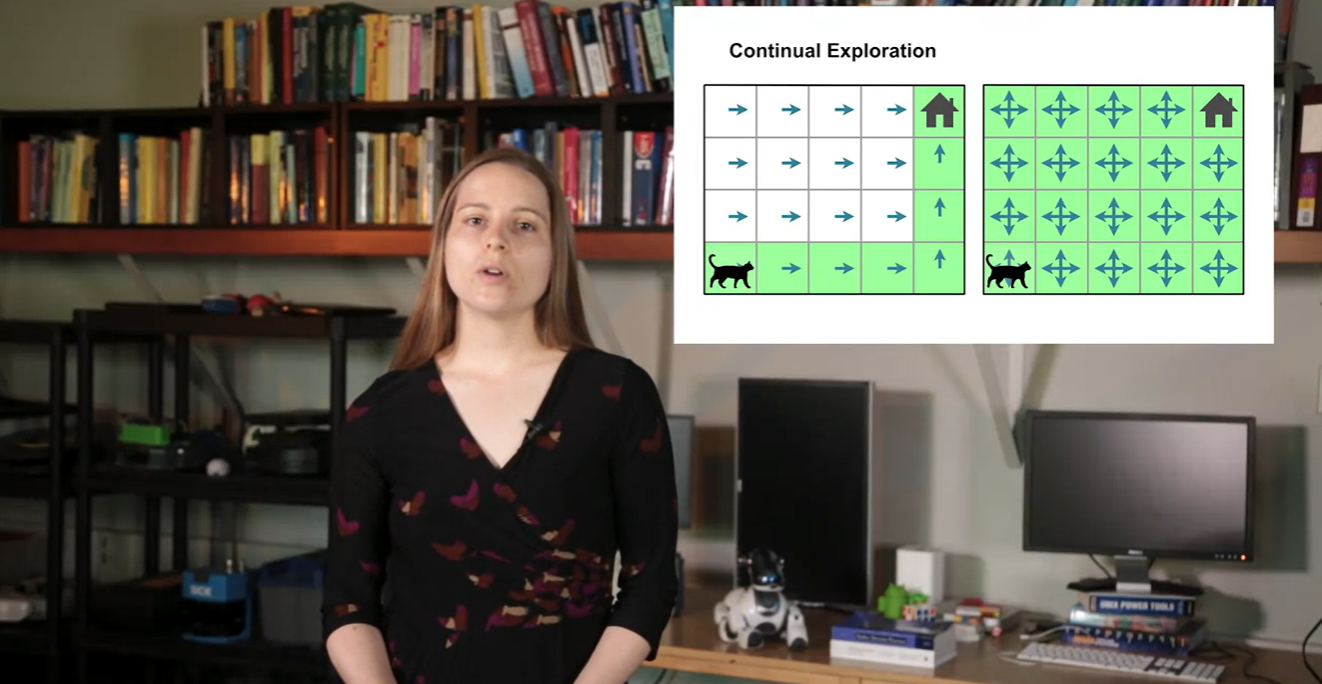
Target policy는 Agent가 경험하는 경로가 매우 한정적이다.
- Behavior policy를 따르도록 하면 훨씬 더 많은 경로를 경험하도록 함으로써 exploration을 촉진한다는 점에서 차이가 있다.
-
는 어떠한 state가 주어진 상황에서, 어떠한 action을 선택할지 대상 policy 내에서 선택할 확률을 말한다.
- 는 어떠한 state가 주어진 상황에서 해당 action을 선택할 확률을 말한다.
-
만약 On-policy라면 와 는 같은 경로를 따르게 된다.
- Off-policy 관점에서는 이를 엄격한 일반화로 본다.
- Summary
Importance Sampling
- Importance Sampling에 대해 알아보자.
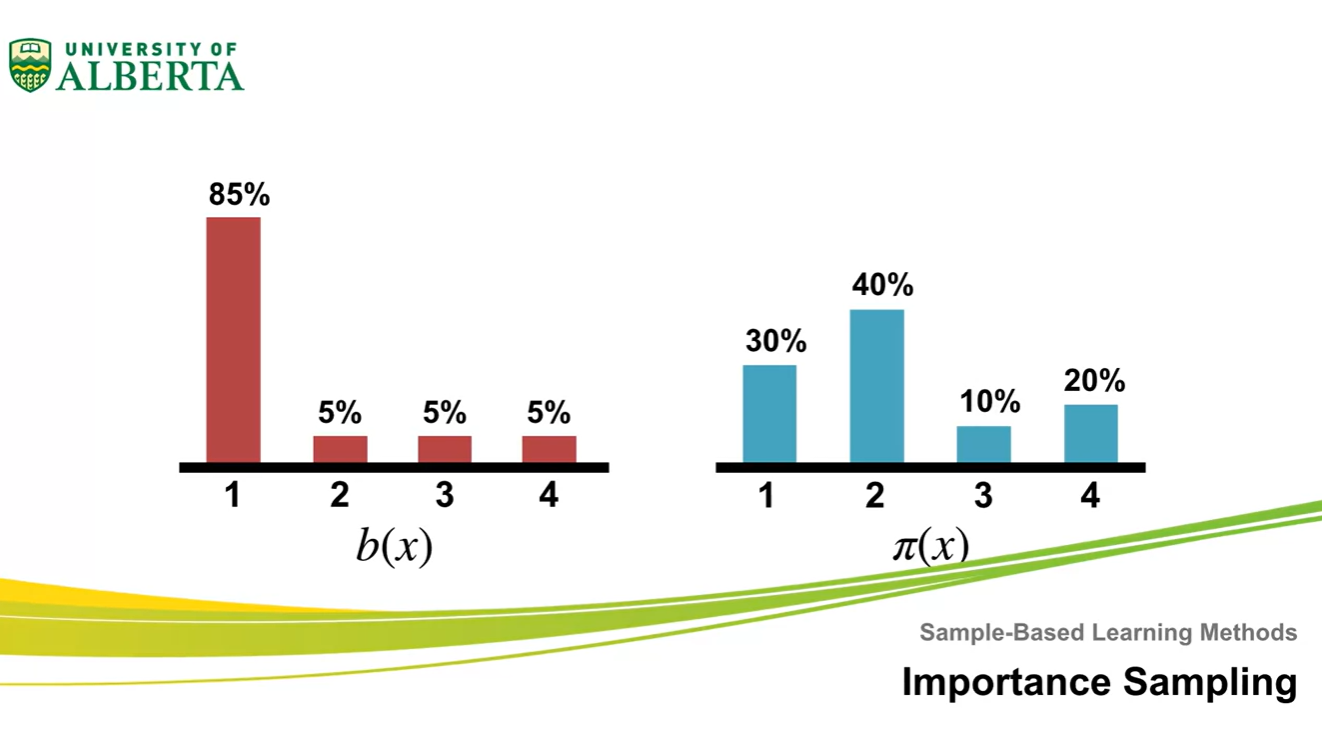
- 이번 강의에서는 expected value of distribution을 추정하기 위해 different distribution인 sample distribution을 활용하는 방법의 타당성에 대하여 유도할 예정이다.

-
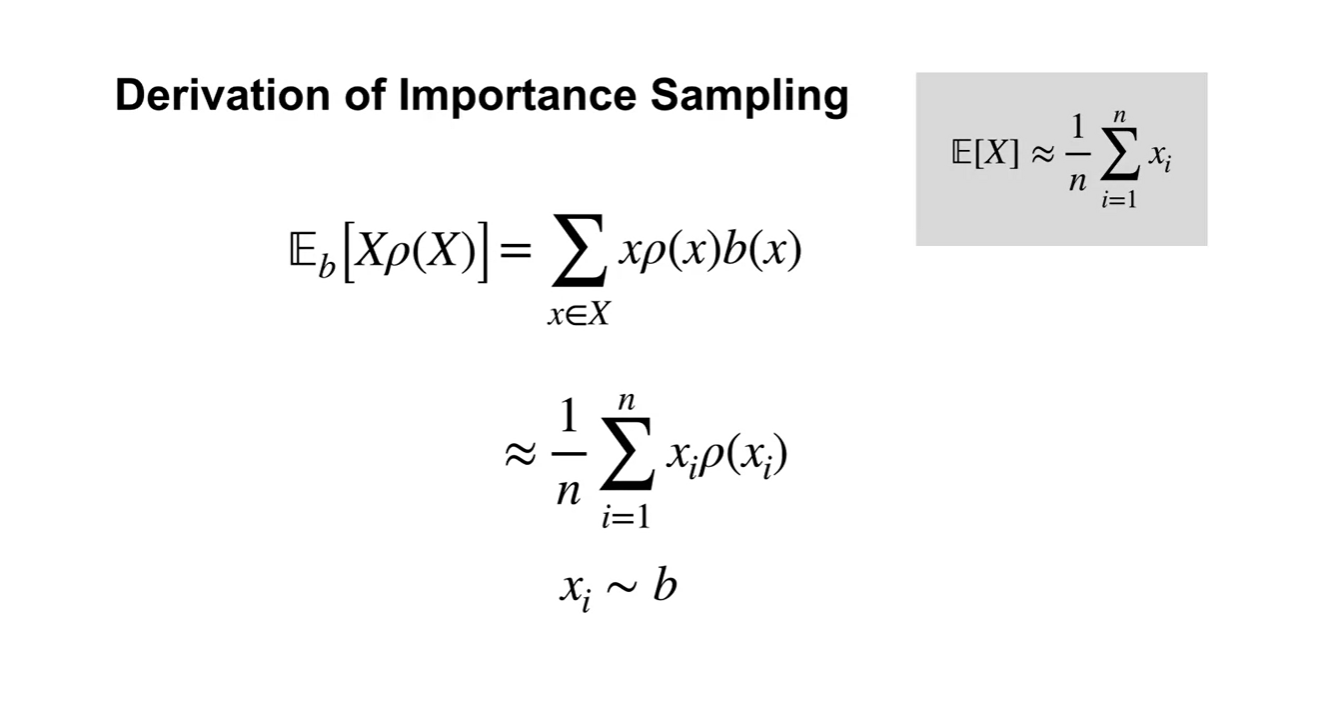
만약 sample 가 를 따른다고 하고, expected value의 estimation이 라고 하자.
- Sample average 는 target distribution을 추정하는 데에 큰 역할을 하게 된다.
-
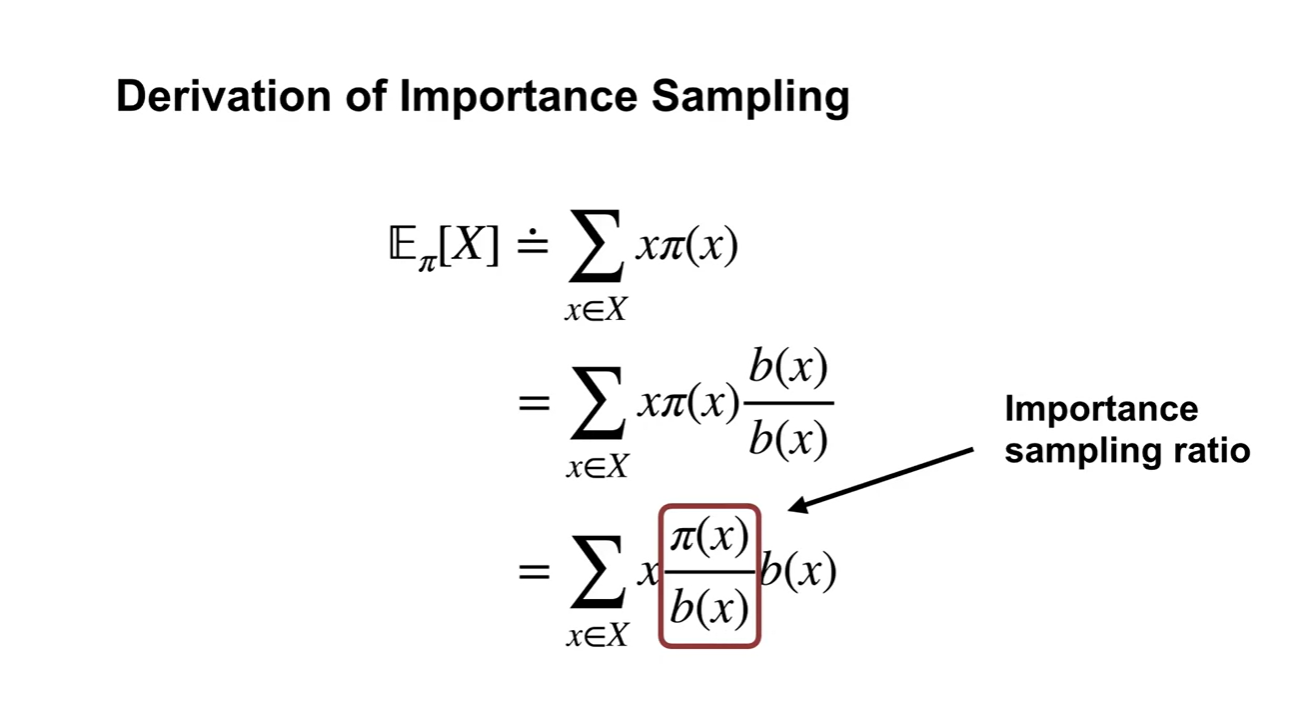
는 를 구하는 과정이다.
-
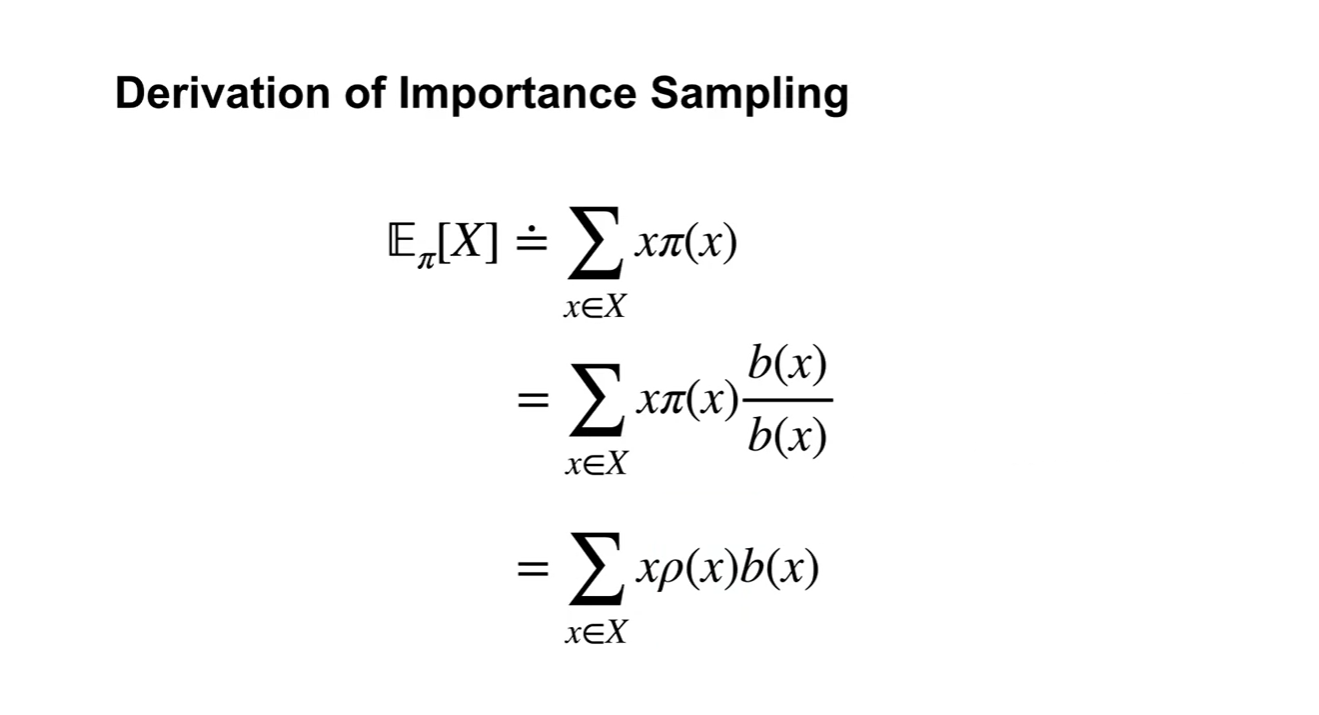
- 항이 바로 Importance sampling ratio다.
- 로 대체하겠다.
-
-
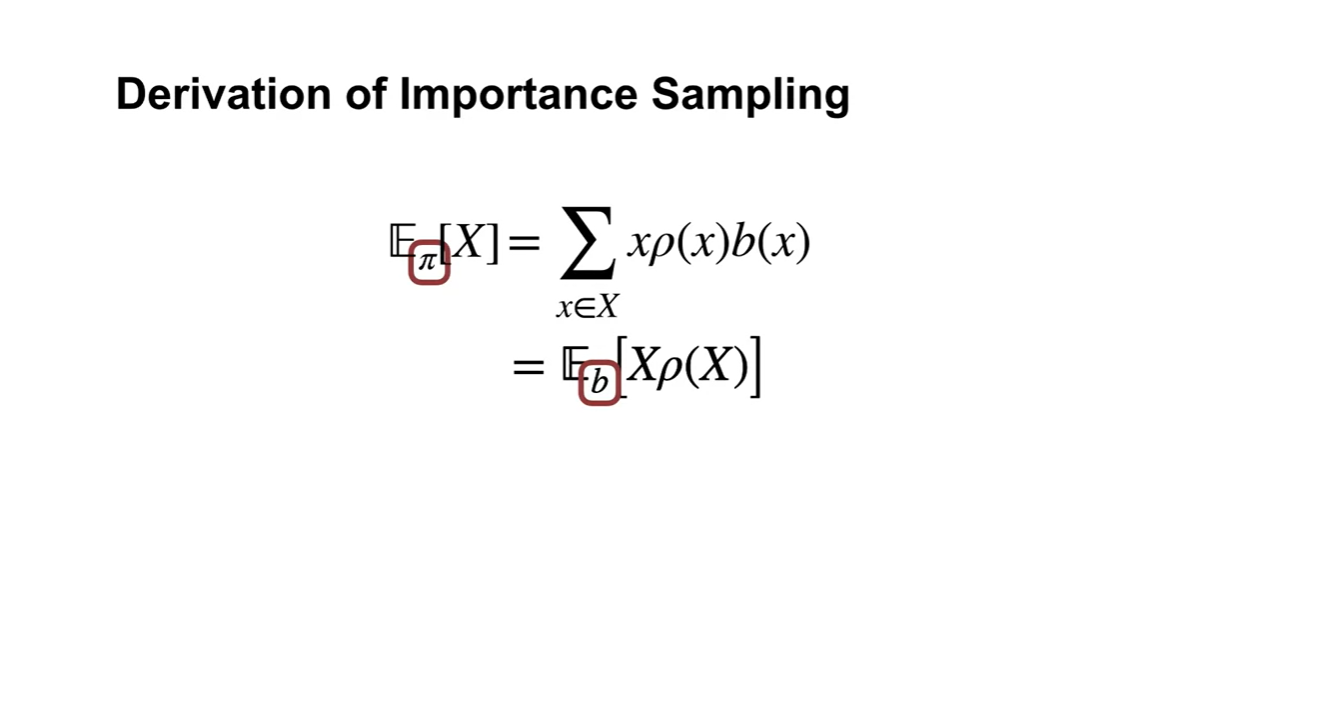
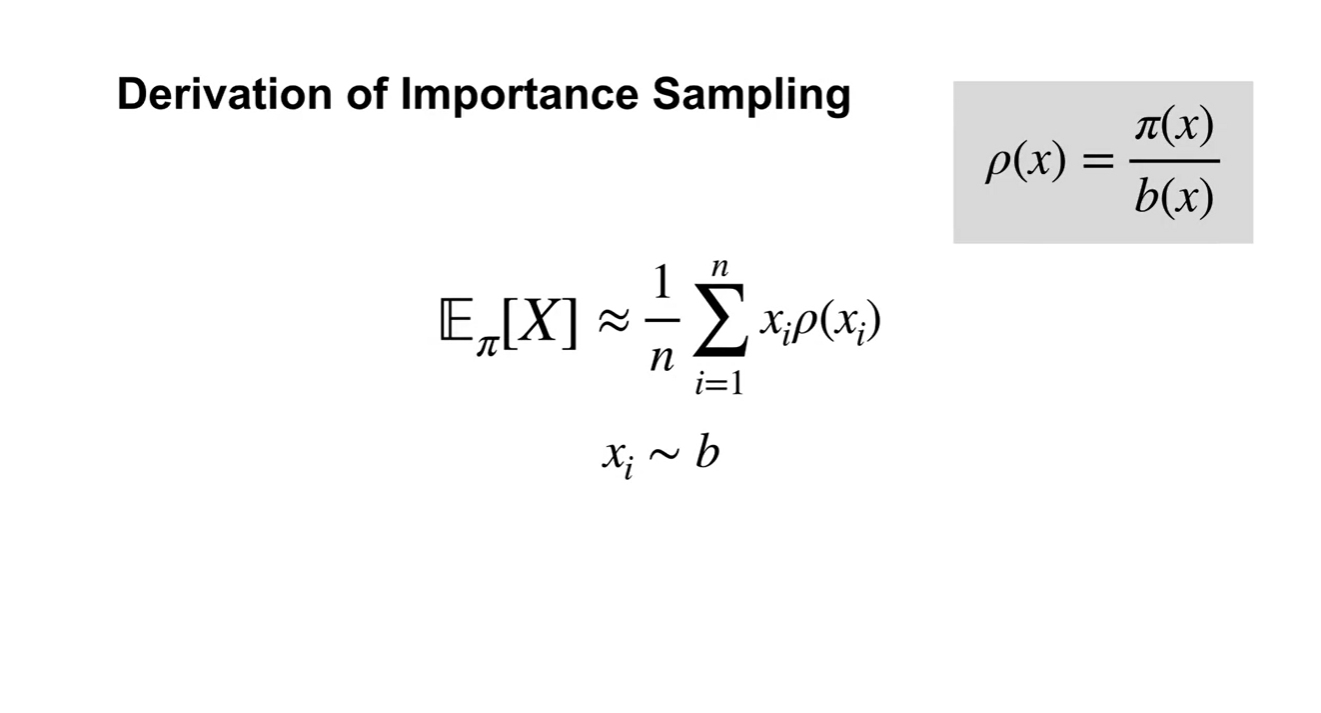
이로써 우리는 를 따르는 실제 expected value를 sample space를 표현하는 에 대한 expected value로 변형시켜 표현할 수 있게 되었다.
- 기댓값의 정의에 의해 는 가 되었다.
-
Data를 통해 Expected value를 계산하는 과정은 매우 간단하다.
- n개의 samples가 존재한다면 로 average 표현함으로써 기댓값을 계산하면 된다.
- 이 때 는 임을 알아두자.
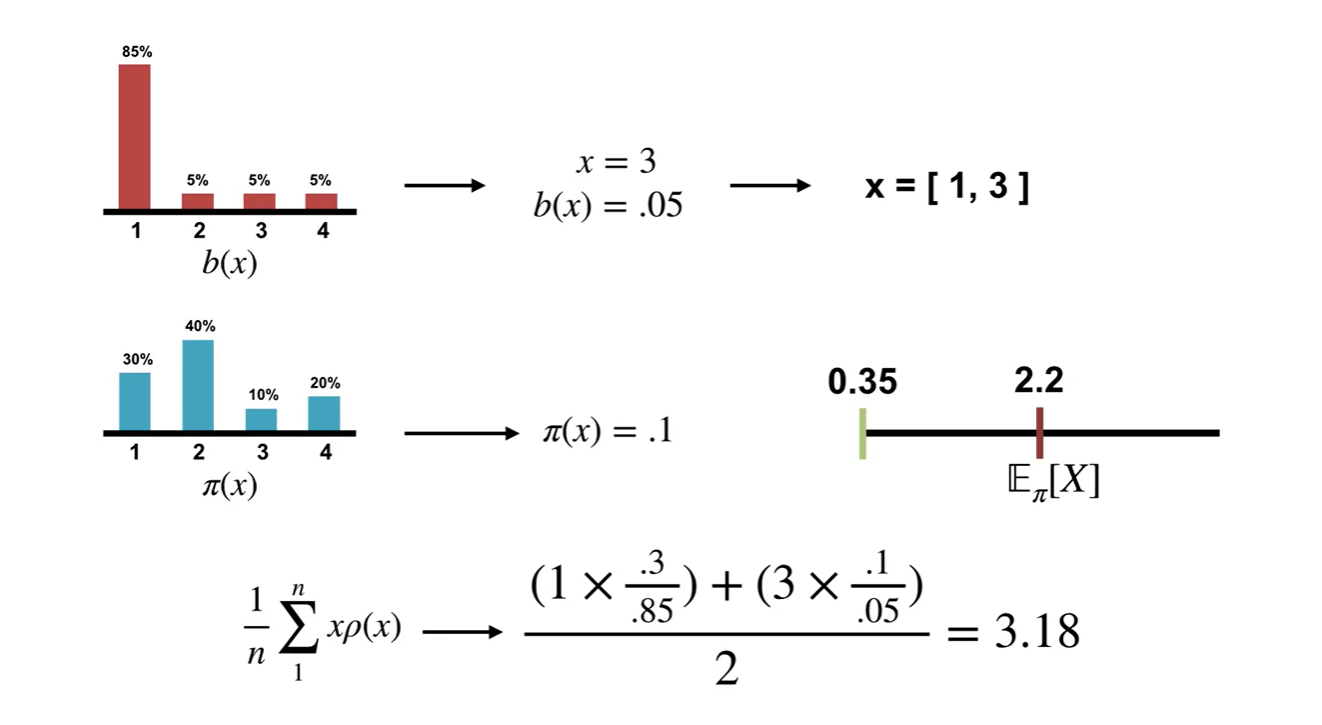
- 아래와 같은 와 distribution이 존재한다고 해보자.
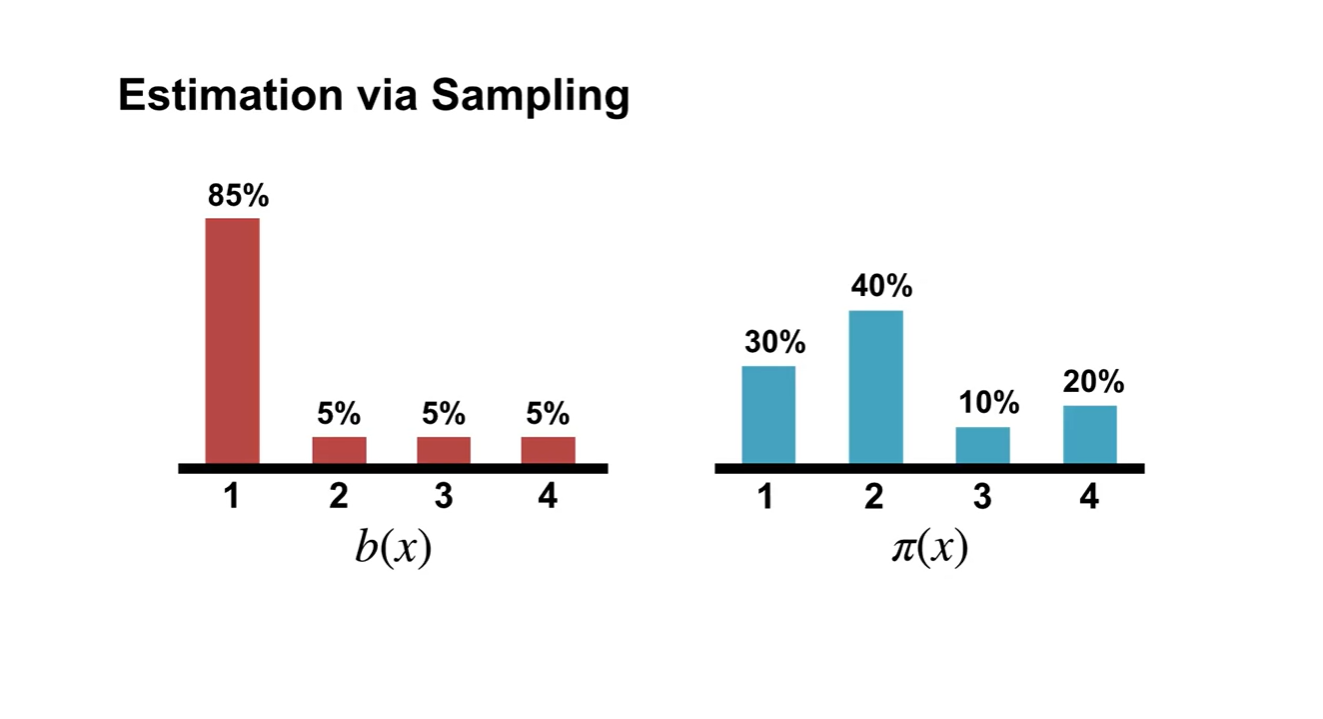
-
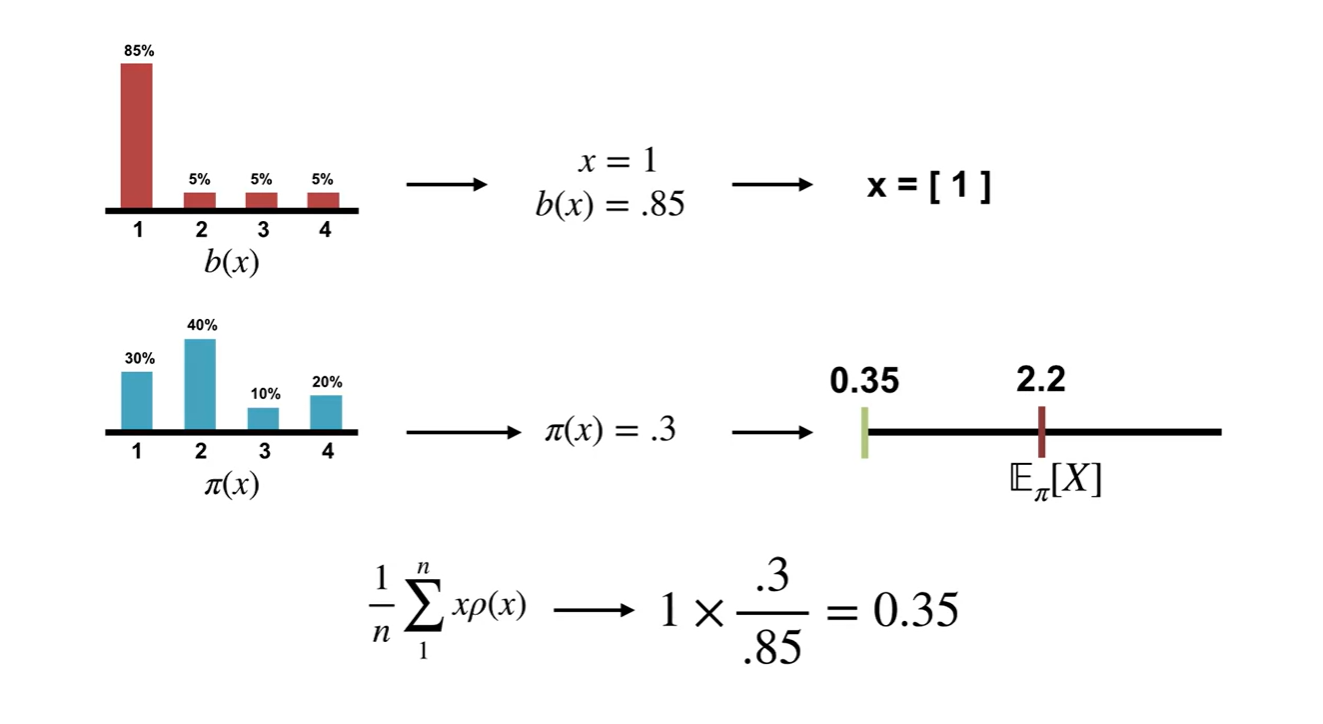
실제 Expected value는 갈색으로 표시된 지점이다.
-
Sample space인 distribution에서 random variable 을 뽑았다고 가정하여 ratio에 따른 기댓값을 계산해 보았다.
- 를 초록색으로 표시하였다.
-
-
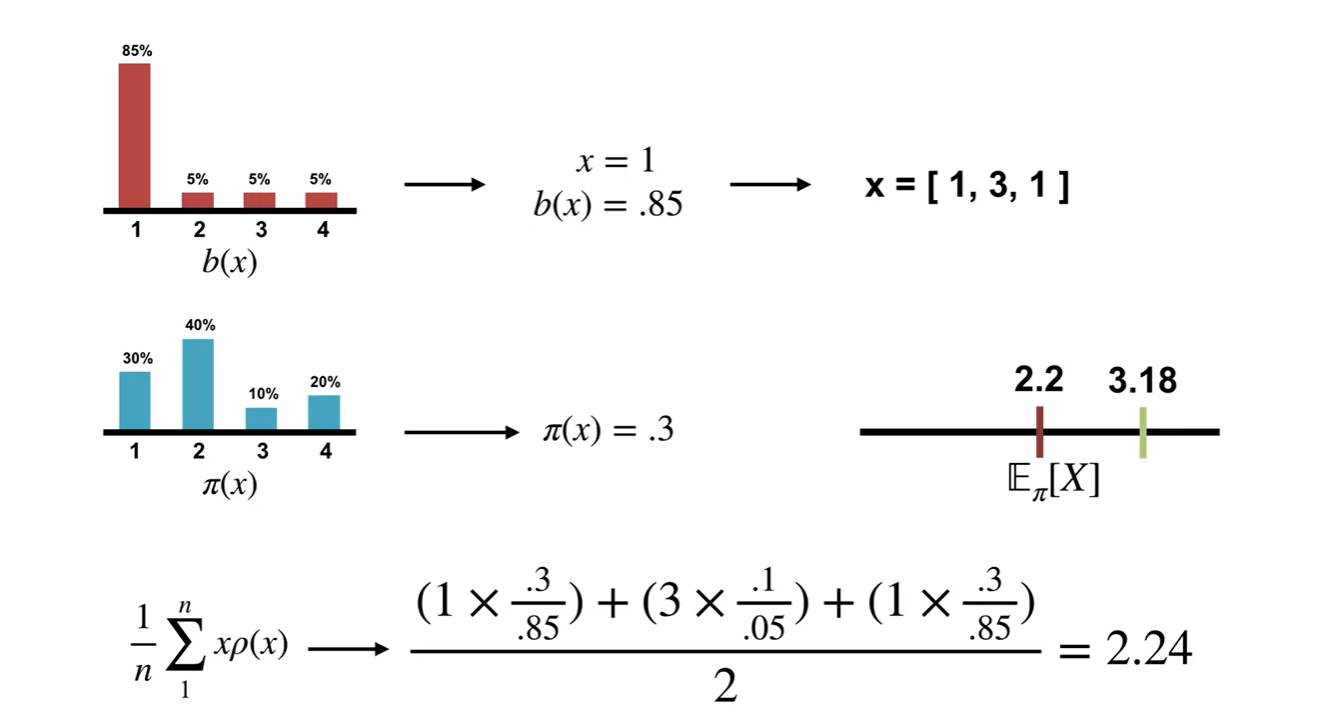
그 다음 random variable 이 뽑혔다고 가정해보자.
- Samples의 기댓값을 계산하면 이다.
-
또 다음 random variable 이 뽑혔다.
-
기댓값을 계산하면 이다.
- 이로써 에서의 기대치를 꽤 잘 추정할 수 있게 되었다.
-
- Summary
Off-Policy Monte Carlo Prediction
- Off-Policy Monte Carlo Prediction에 대해 알아보자.
-
이번 강의에서는 정확한 returns를 계산하기 위해 importance sampling을 어떻게 사용할 수 있을 것인지에 대해 이해한다.
- 또한 Off-policy learning을 위해 Monte Carlo prediction argorithm을 수정하여 정리할 것이다.
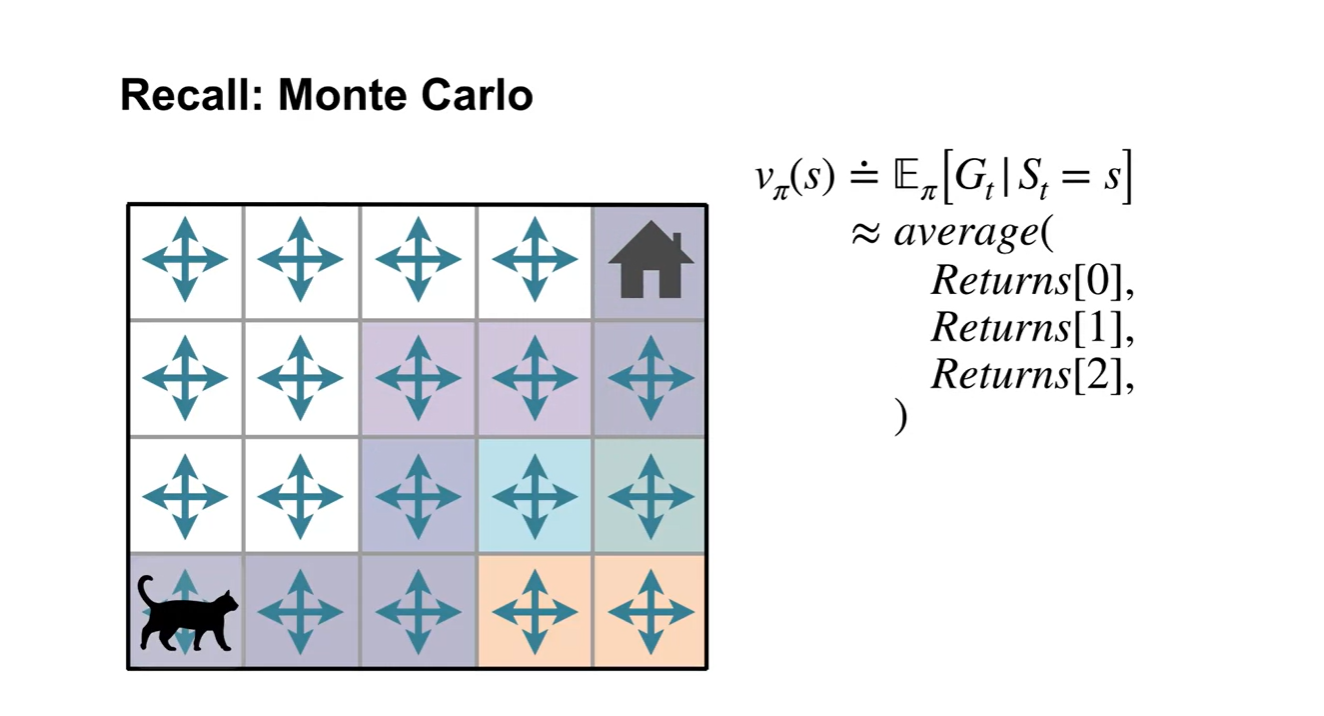
- Monte Carlo prediction은 다음과 같은 세 가지 색상의 경로로 움직이는 returns를 averaging하는 것을 말한다.
-
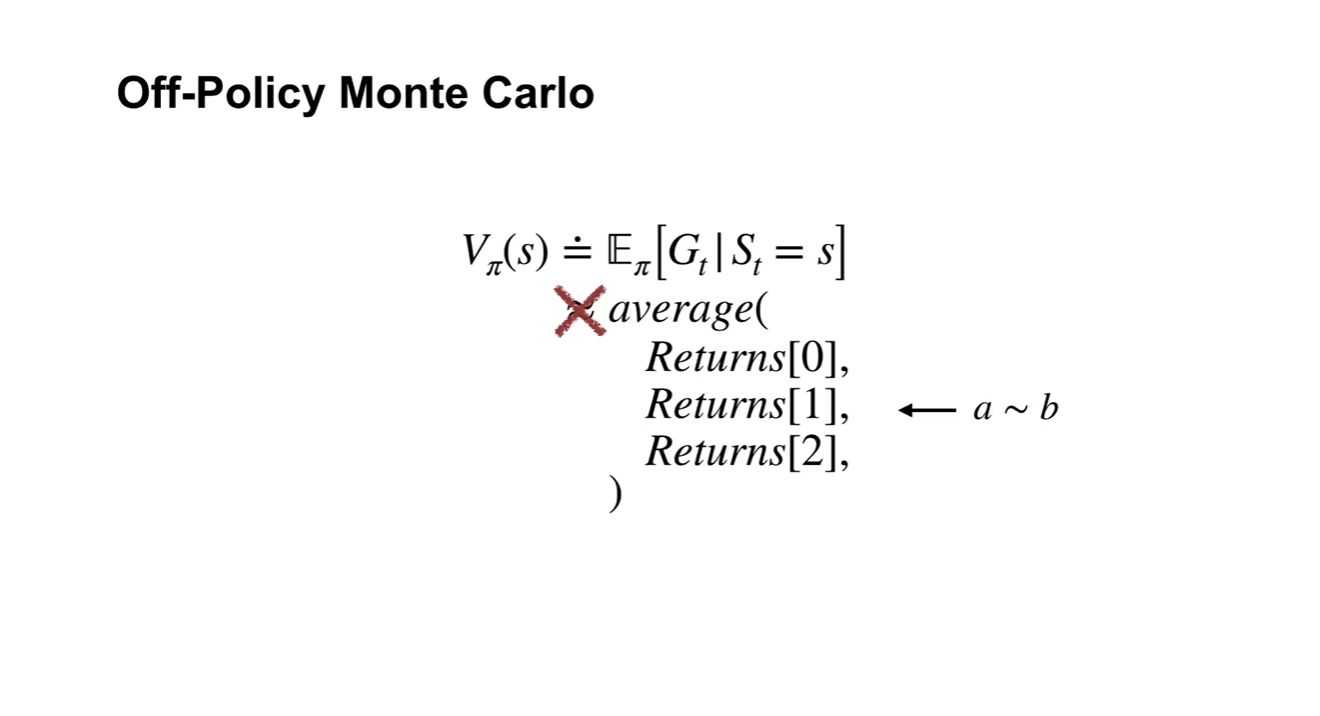
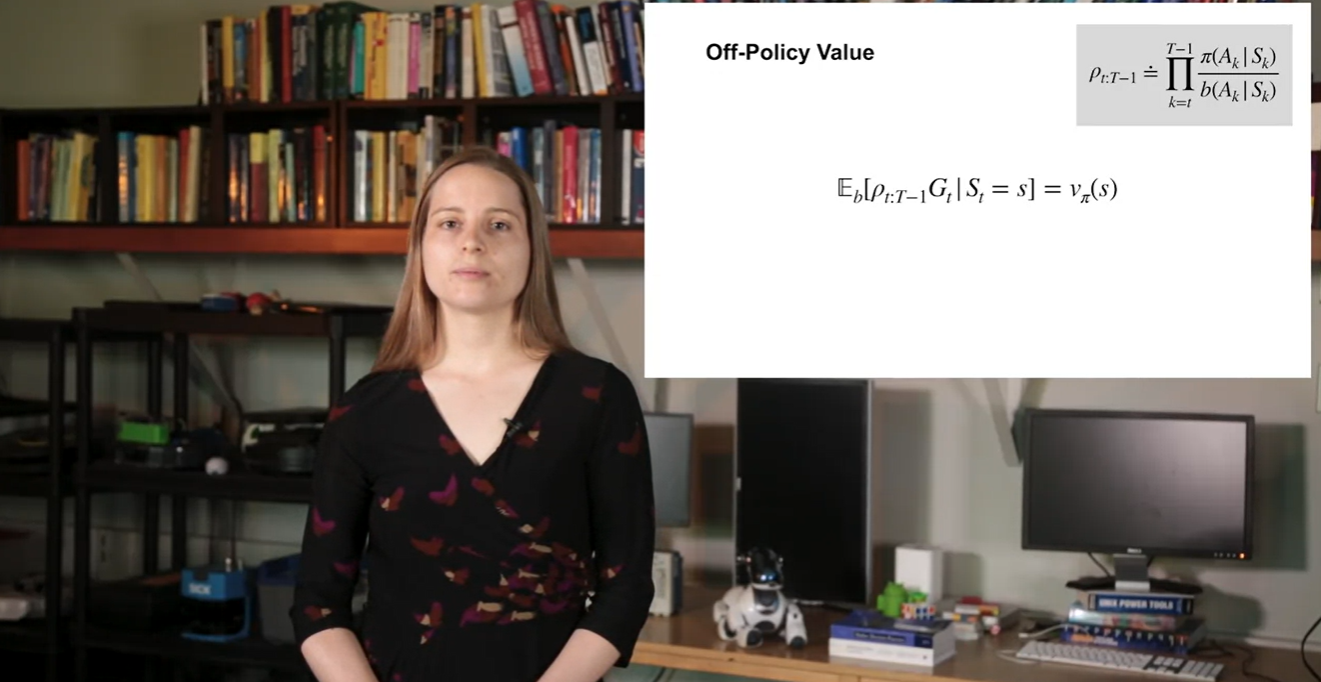
그러나 위에서 얻은 returns는 모두 space에서 sampling된 것이기 때문에 엄연히 말하자면 와 같다고 말할 수는 없다.
- Importance sampling에서 다루었듯이 space에서 sampling된 값을 고려하여 기댓값을 계산하여야 한다.
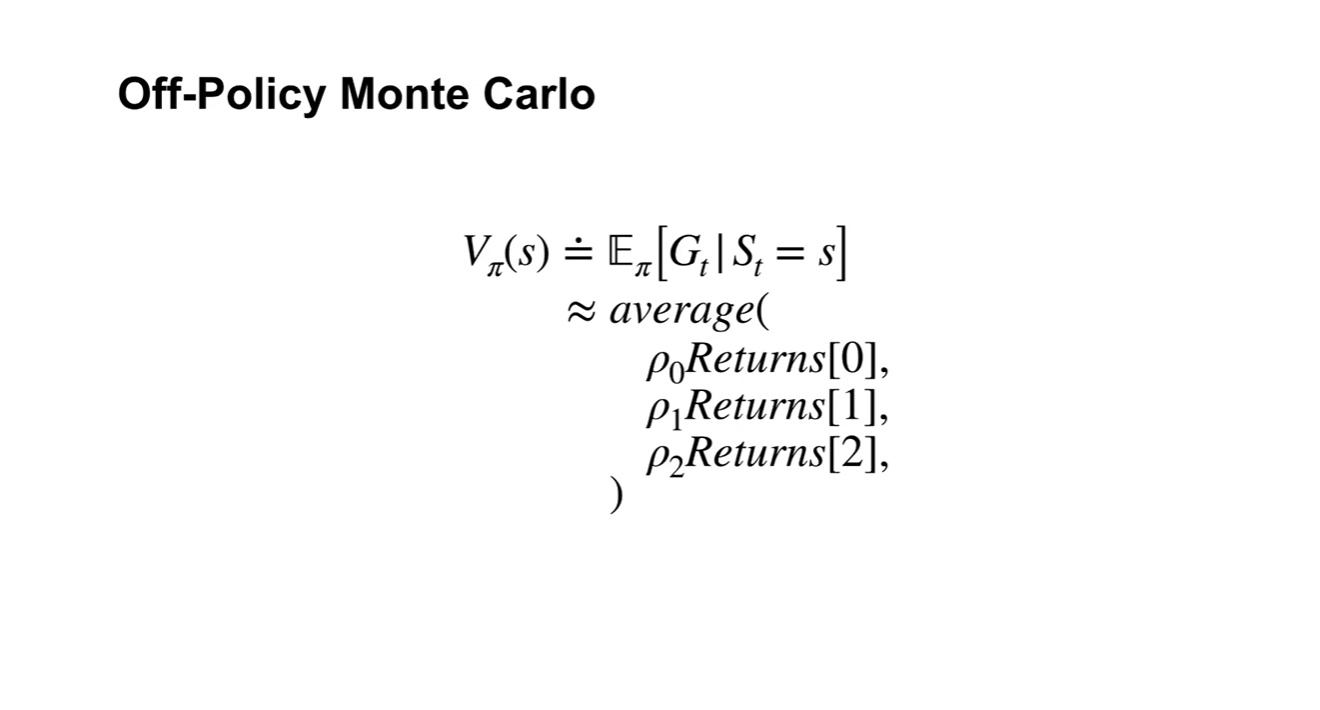
-
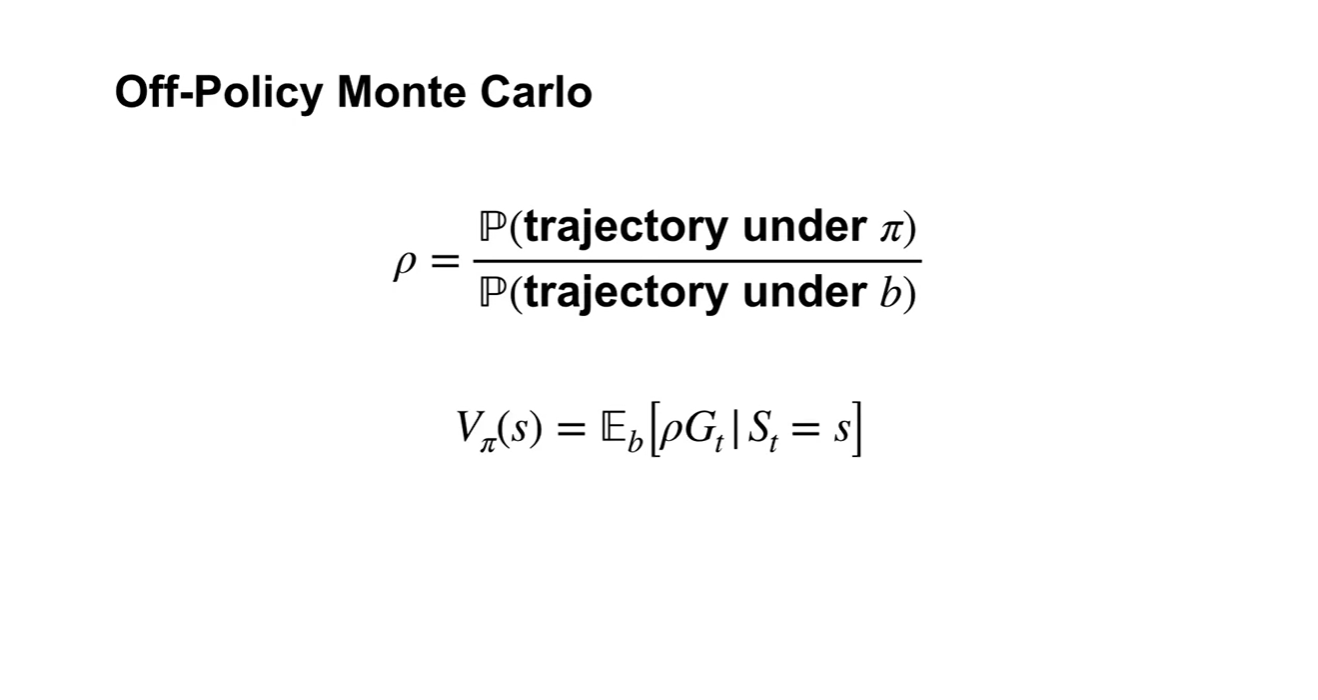
값은 under / under ratio를 말한다.
- Expected value는 로 계산한다.
-
Actions는 behavior 에 대해 sampling되었다.
- 기존 Policy 수식은 , 가 주어졌을 때 그 다음 states, actions의 상황에 놓일 확률을 모델링한다.
-
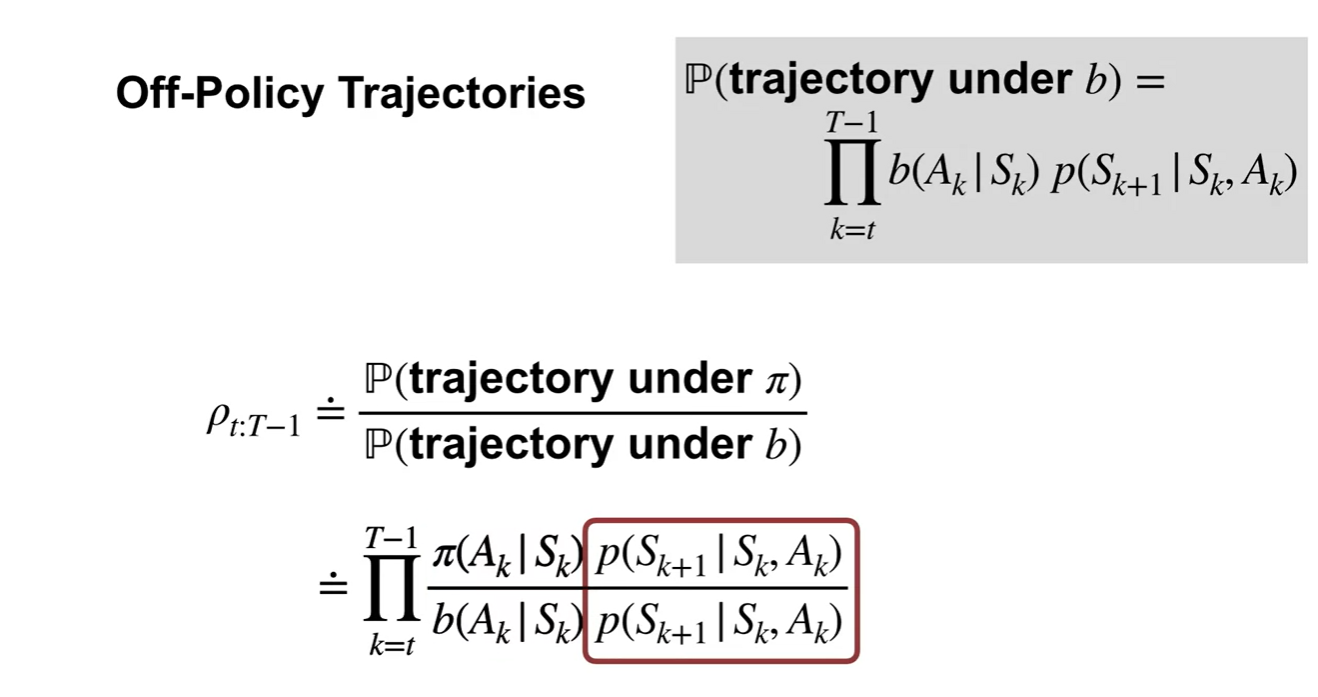
Behavior 에 관한 chain-rule로 풀어서 정리하면 다음과 같이 전개된다.
-

-
우리가 구하고 싶은 는 under / under 로 정의한다.
-
이 값은 로 정리할 수 있고,
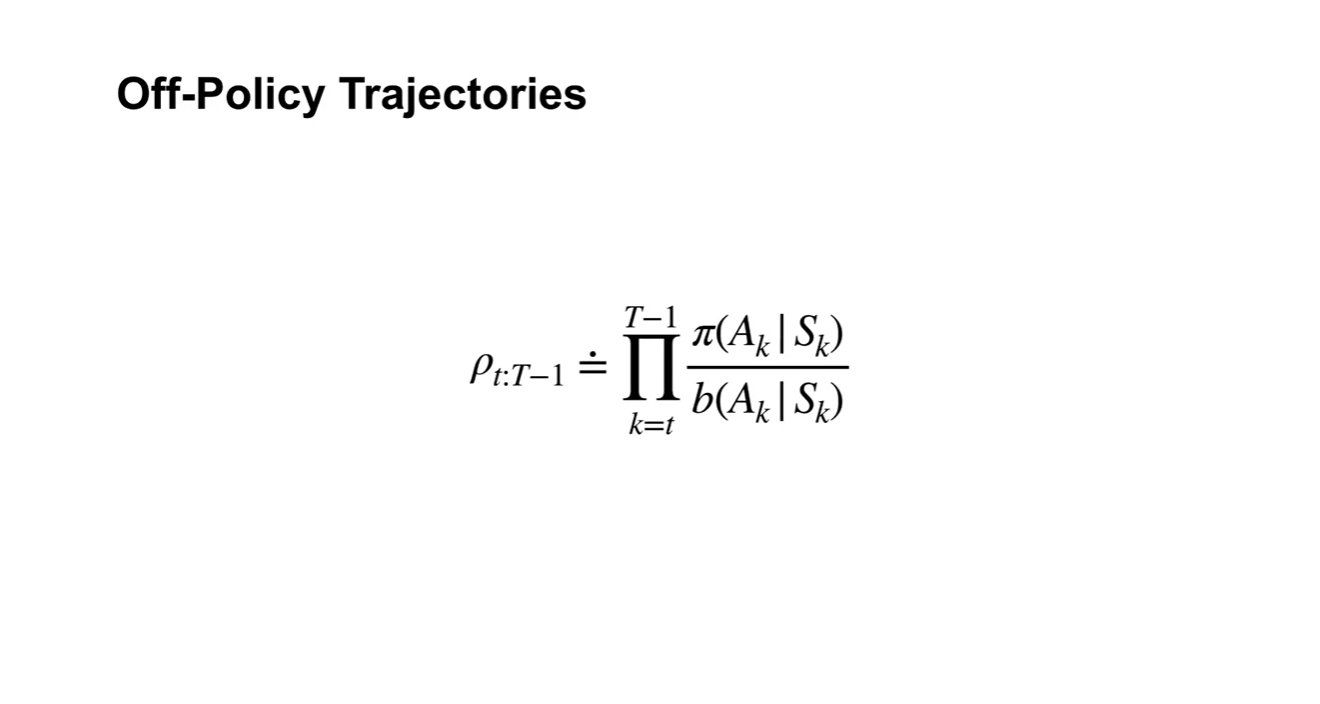
약분하면 로 표현된다.
-
- 따라서 Off-Policy Trajectories는 로 최종적으로 나타낸다.
-
이는 behavior 에 대하여 sampling된 데이터의 기댓값이라 말할 수 있다.
-
기존 MC prediction에서의 value estimation은 아래와 같은 알고리즘으로 구현되어 있다.
-
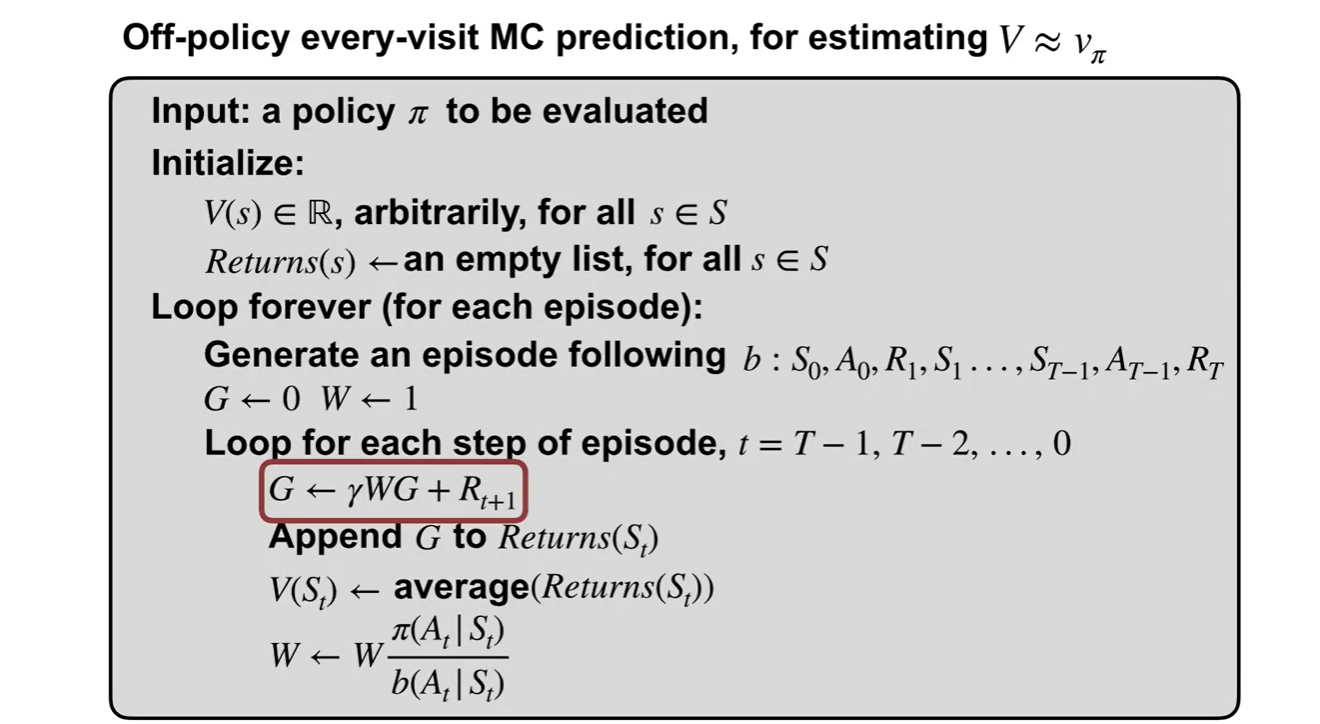
Off-policy MC prediction 알고리즘은 sample space와 real space의 ratio를 고려한 값까지 함께 returns 값에 추가시킨다.
-
-
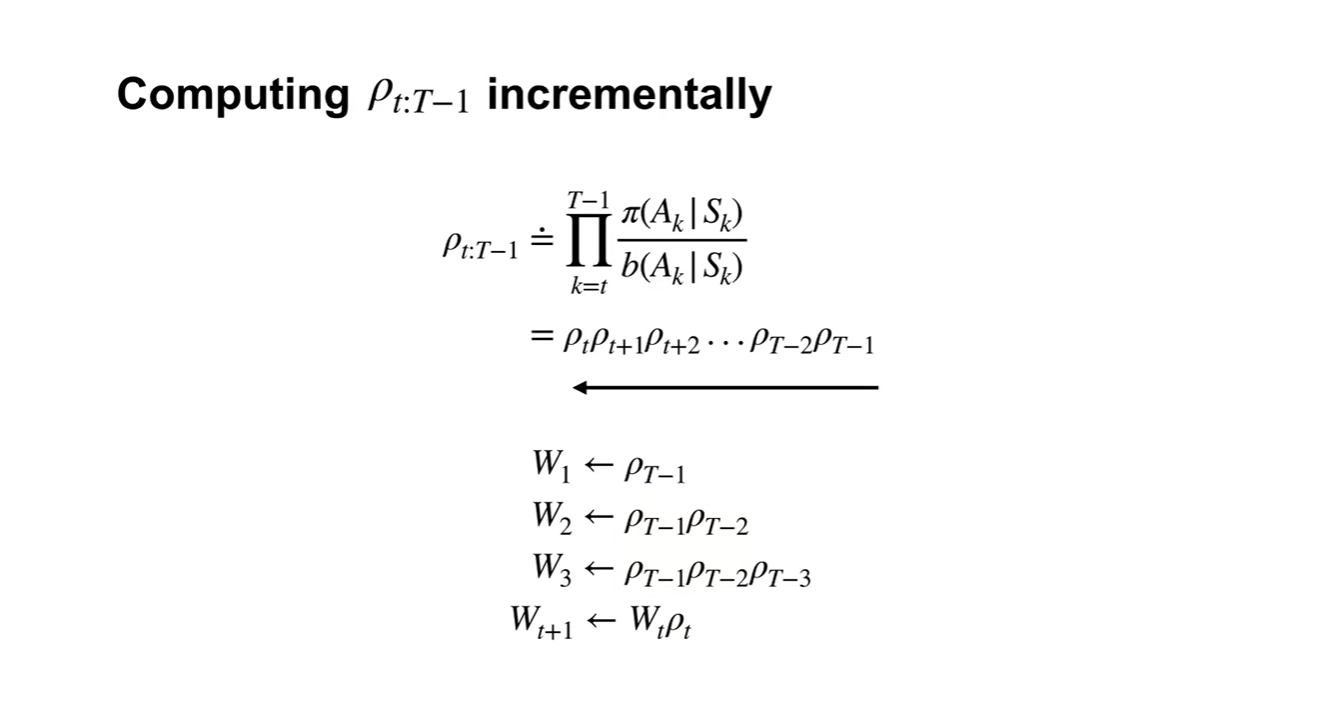
를 incremental하게 계산하는 방법은 다음과 같이, 가장 최근의 과거로부터 initial 까지의 값을 곱해주는 과정으로 전개된다.
- Summary

