Full State Feedback
상태변수를 이용한 제어 방식 중 하나
모든 상태변수를 이용해 피드백 구조를 만들어 제어
상태 제어기 설계
u = -Kx
제어기의 이득값에 대한 계산 -> 전체 시스템의 안정을 돕는 것
시스템 행렬의 고유 값의 실수 부분이 음의 부부에 있을 것
x' = Ax+Bu
= Ax - BKx
= (A - BK)xA - BK = Acl : Closed-loop 시스템 행렬부분
-
상태공간모델 구성
-
제어기 설계 u = -Kx
-
적절한 k값 선정
-
Acl 고유값 확인
Pole Placement 방식
극점을 위치시킨다는 의미
상태공간에서의 시스템 행렬 고유 값 = 전달함수의 극점과 같은 역할
LQ (Linear Quadratic) 제어기
최적화 방식을 이용한 제어기 종류 중 하나
제어기 이득을 선정하는 방법 중 하나
- 시스템의 상태방정식 구하기
- Performance Index 또는 비용함수 정의
- Algebraic Riccati Equation 수식을 풀어 K값 선정
비용함수
= 목적함수 = cost function
최적화 하고자 하는 변수의 상관관계를 통해 이루어진 함수
최적화
비용함수가 최대 또는 최소가 되는 최적의 변수 값을 찾는 과정
1차함수: 최대, 최소값 존재X
2차, 4차함수 : 최대, 최소값 존재
-> 제곱 형태로 비용함수를 나타냄
LQ 제어기 비용함수
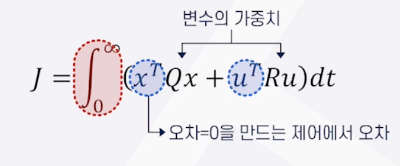
비용함수가 최소인 u 획득
시스템의 성능관련 x, 출력 u
Algebraic Riccati Equation
LQ 제어기 설계 시 만족해야 할 2가지 조건을 풀어주는 수식
1. 시스템 안정
2. 비용함수 최적화
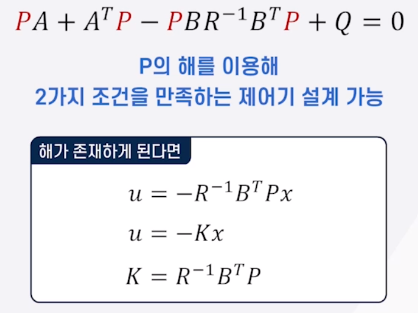
A, B: 상태공간 모델로부터 획득
R, Q: 비용함수 선정 시 정의
