유령정체 현상
고정 상수 값(L) : 앞차량을 따라가는 목표거리
오차 전파 현상 Error Propagation
뒤로 갈수록 오차가 점점 더 증가하는 현상
사람에 따라 사고를 발생시킬 가능성이 있음
String Stability
필요성
전체 대열에서 앞 차량의 오차가 뒤 차량오차로 전파되지 않음
Spacing Error
현재 상대거리와 목표 상대거리의 차이(delta)
String stability 만족여부 확인
전달함수를 통한 String Stability 해석 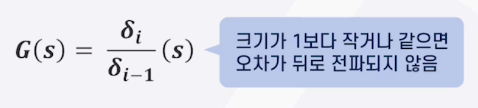
Constant Spacing Control
목표 상대거리 값을 일정한 상수로 설정하여 앞 차량과의 간격을 조절하는 방법
Cruise Control
내 차량이 고정속도를 유지하도록 하는 제어
Smart Cruise Control
고정 속도 운행 중 앞에 차량이 있다면 안전거리 유지하면서 주행
상대거리를 피드백 받음
Constant Spacing Control 한계
모든 차량에 같은 제어기가 설계되어 있다고 가정
PD 제어기 : 다수의 차량 시 안정성 보장 못함
Constant Time Gap (CTG)
Smart Cruise Control에서 앞차량과의 안전거리 유지 방법 중 하나
L = h * v
L : 상대거리
h : 비례상수, Time-Gap 파라미터
V : 속도
delta : 목표상대거리 오차 = theta + Ldes = theta + Ldes
Ldes : 목표 상대거리 = h * v (뒷차량 속도)
theta : 측정 상대거리 = 뒤차량의 위치 - 앞차량의 위치
Xdes'' : 자동차가 가져야할 목표 가속도 값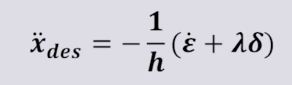
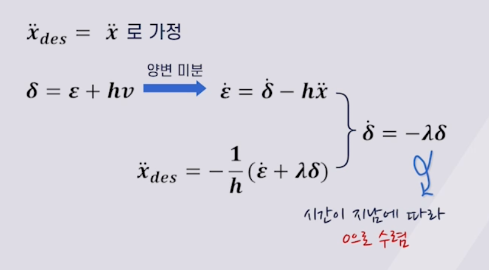
적절한 Lamba와 h값 선정 시 항상 1보다 작거나 값은 값이 되도록 설계 가능
