시스템
시스템 = 전달함수 + 상태공간
전달함수
라플라스 변환 : 시간영역 -> 주파수 영역
전달함수 : 입력과 출력의 비율
주파수 영역에서 더 간단한 계산 가능
상태변수
시스템 특성을 나타내는 변수
변위, 속도, 가속도를 기계시스템의 상태변수로 선정할 수 있음
변위 : x1 = x(t)
속도 : x2 = x'(t) = x1'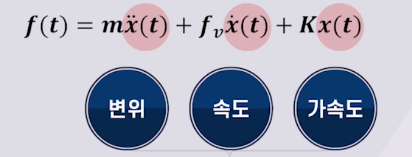
상태공간모델
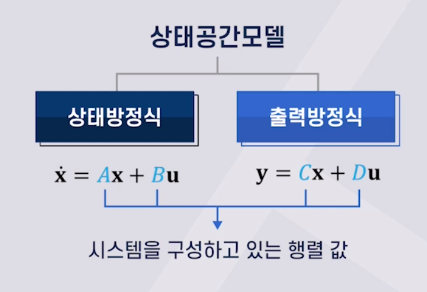
상태방정식 : 차수가 높은 미분방정식을 여러 개의 1차 미분방정식으로 나타낸 것
출력방정식 : 출력이 입력, 상태변수와 어떠한 관계로 이루어져 있는지를 보여주는 방정식
전달함수에서 제어 안정성
주파수 영역 -> 라플라스 변화
R(S) 입력 -> G(S) -> 출력 C(S)
시간 영역 -> 상태공간모델
제어기 설계 전 발산하는 불안정한 시스템, 수렴하거나 그 값을 유지하는 안정한 시스템인지 살펴봐야함
전달함수 G(S) = s + z / (s + p)
-> 극점의 위치에 따라 안정성 결정
-> 복소평면 s-plane에 극점의 위치 나타냄
-
극점 Pole
안정과 불안정을 파악할 수 있는 전달함수의 구성요소
전달함수의 분모를 0으로 만들어주는 값
극점이 하나라도 우방면 RHP에 있으면 불안정 -
영점 zero
분자를 0으로 만들어주는 값 -
상태공간모델에서 행렬의 값으로 안정성 판별
