협동적응형순항제어 CSCC (Cooperative Smart Cruise Control)
장점
고속도로의 효율적 사용
주행 중 공기저항 감소로 자동차의 연비 향상
운전의 피로 감소
사고 위험도 감서
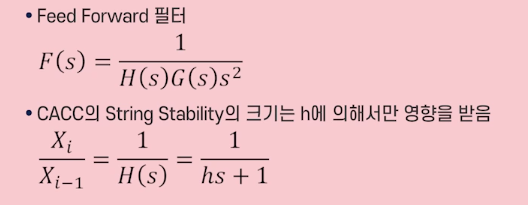
CACC
AFS 능동형 전륜 조향
유성기어에 의해 기계적인 연결을 유지하면서 입력 조향각 대비 출력 조향각 크기를 가변할 수 있음
-
Steer by Wire (SBW)
다양한 제어 전략 구현 가능, 무게를 줄일 수 있음, 연비향상
전원 고장 등에 대해 충분한 신뢰성 확보 필요, 기계식보다 비쌈 -
Active Steering System 능동형 조향시스템
MDPS (Motor Driven Power Steering) -> AFS (Active Steering/Front System) -> SBW (Steer by Wire)
SBW 대비 기계적 연결로 고장 대비 가능
운전자의 조향 입력 + 추가적 입력 = 바퀴의 구동
조향성능향상, 횡방향 안정성 향상
VGR 가변조향비
저속에서는 조향비를 낮추고 고속에서는 높여줌
저속에서는 편의성, 고속에서는 안정성 추구
VDC 차량동특성제어기
조향입력, 브레이크 등의 입력을 받아 차량의 과도한 조향각, 미끄러짐을 감지
능동적으로 출력 조향각을 조절하여 입력 조향각을 최대한 잘 따라갈 수 있도록 함
Torque vectoring
토크의 변화를 주어 벡터의 크기와 방향을 변화하는 기술
Vector : 크기와 방향을 모두 갖는 양
Torque vector : 바퀴로 전달되는 토크의 크기와 방향
언더스티어
운전자가 입력한 조향값보다 자동차가 덜 돌아간 것
차동장치
양쪽 바퀴의 속력이 달라도 구도이 가능할 수 있게 해주는 기계적 시스템
코너링 = '선회주행'을 할 때 좌우 바퀴 회전수가 달라야함
차량이 선회주행을 할 때 선회반경이 큰 바깥쪽 타이어를 더 빠르게 안쪽 타이어를 더 느리게 회전
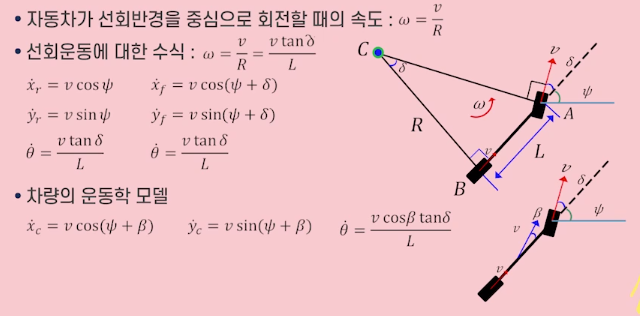
Kinematic Bicycle
자동차 양쪽 바퀴를 하나의 바퀴로 간략화하여 나타낸 운동학모델
운동학
시스템이 어떠한 방식으로 운동을 하는가를 보여주는 방식
운동의 원인이 되는 힘을 고려하기 보다는, 물체의 이동, 이동에 따른 궤적, 속도, 가속도 등을 기하학을 이용해 나타내는 것을 고려
자동차 운동학
-
가정
자동차가 평면을 돌아다님
바퀴에 있는 타이어는 노면과 미끄러짐 없이 궤적을 잘 따라감
일반 자동차처럼 앞쪽 바퀴만 조향가능
양쪽 바퀴를 하나의 바퀴로 간략화
자동차 속력은 일정 -
변수 정의
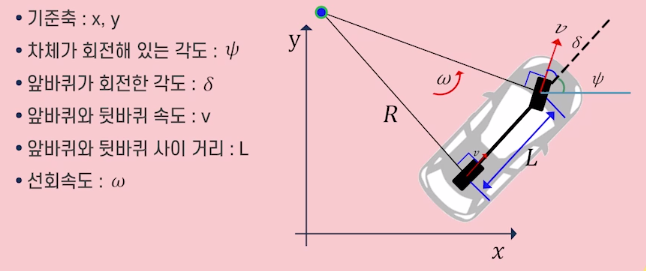
-
유도과정