오늘도 ChatGPT에게 먼저 질문했다.
이제는 답변을 정리해서 쓰기로 했다.
좋은 답을 내놓긴 하지만 장황하게 대답하는 경우가 많아서.
Q. What is CNN in Deep Learning?
- CNNs are inspired by the visual cortex of animals, which is responsible for processing visual information.
- They consist of multiple convolutional layers that extract features from the input images.
- The output of each convolutional layer is passed through a non-linear activation function.
- Pooling layers are often used to reduce the spatial dimensionality of the feature maps.
Q. What is the biggest change in CNN compared to earlier neural network architectures?
- The use of convolutional layers, which allows for the automatic extraction of relevant features from images
- traditional neural networks used fully connected layers, which required the input data to be flattened into a 1-dimensional vector, losing the spatial information in the process. This made it difficult to handle images and other high-dimensional data
- which apply a set of filters to the input image, extracting features such as edges, corners, and textures
- can learn increasingly complex features and relationships in the data
- allowing for higher accuracy and faster training times
Q. What do convolutional layers do in CNN?
- their purpose is to automatically extract relevant features from the input image.
- consists of a set of filters (also called kernels or weights), each of which is a small matrix that is applied to a specific region of the input image
- The filter slides across the input image, computing the dot product between itself and the region of the image it is currently positioned over
재정리 해보자.
- 이전 다층신경망(MLP)은 각 뉴런들이 선형 모델과 활성함수로 모두 연결된(Fully-Connected) 구조.
- : 활성함수(Activation Function)
- : 가중치(Weignt) 행렬
- 각 성분 에 대응하는 가중치 행렬 이 필요하다.
- 가 바뀌면 가중치도 바뀐다.
-
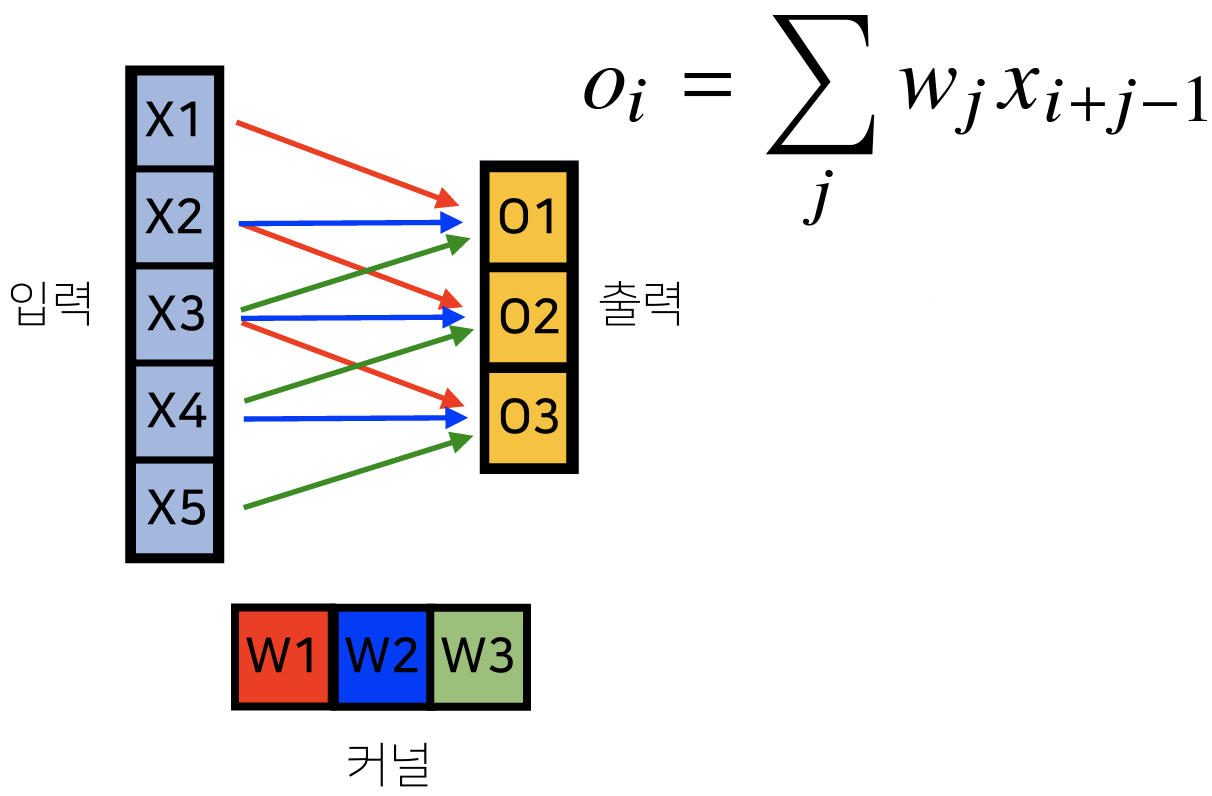
Convolution 연산은 커널(Kernel)을 입력 벡터 상에서 움직이며 선형 모델, 활성 함수가 적용된다.
- : 커널 사이즈
- : 가중치 행렬
- 모든 에 적용되는 커널은 로 같고 커널의 사이즈만큼 x상에서 이동하며 적용된다.
-
수학적 의미는 신호(signal)를 커널을 이용해 국소적으로 증폭 또는 감소시켜 정보 추출, 필터링 하는 것.
-
1차원뿐만 아니라 다양한 차원에서 계산가능하다.
-
정의역 내에서 움직여도 변하지 않고(
Translation Invariant) 국소적으로(Local) 적용 -
f: 커널, g: 입력
- 오직 입력에 해당하는 값만 바뀌고 커널은 그대로 유지한다.
- 오직 입력에 해당하는 값만 바뀌고 커널은 그대로 유지한다.
-
입력크기 커널 크기 , 출력 크기
→ , -
채널이 여러 개인 경우 커널의 채널 수와 입력의 채널 수가 같아야 한다.
- 이 때, 3차원 부터 행렬이 아니라 텐서(Tensor)라고 부른다.
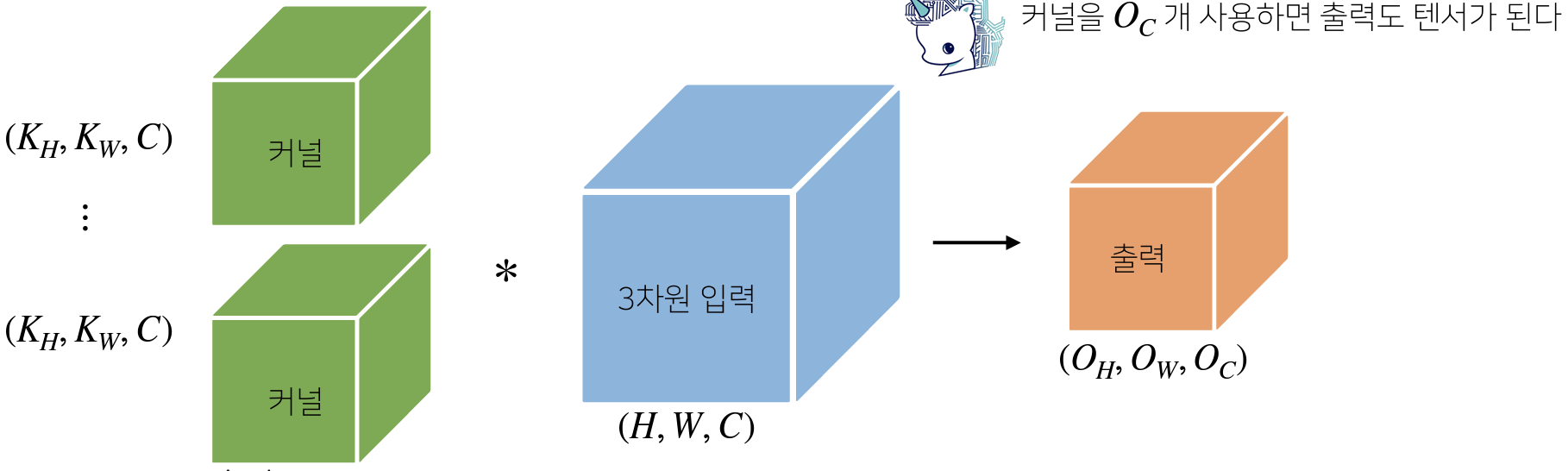
- 이 때, 3차원 부터 행렬이 아니라 텐서(Tensor)라고 부른다.
-
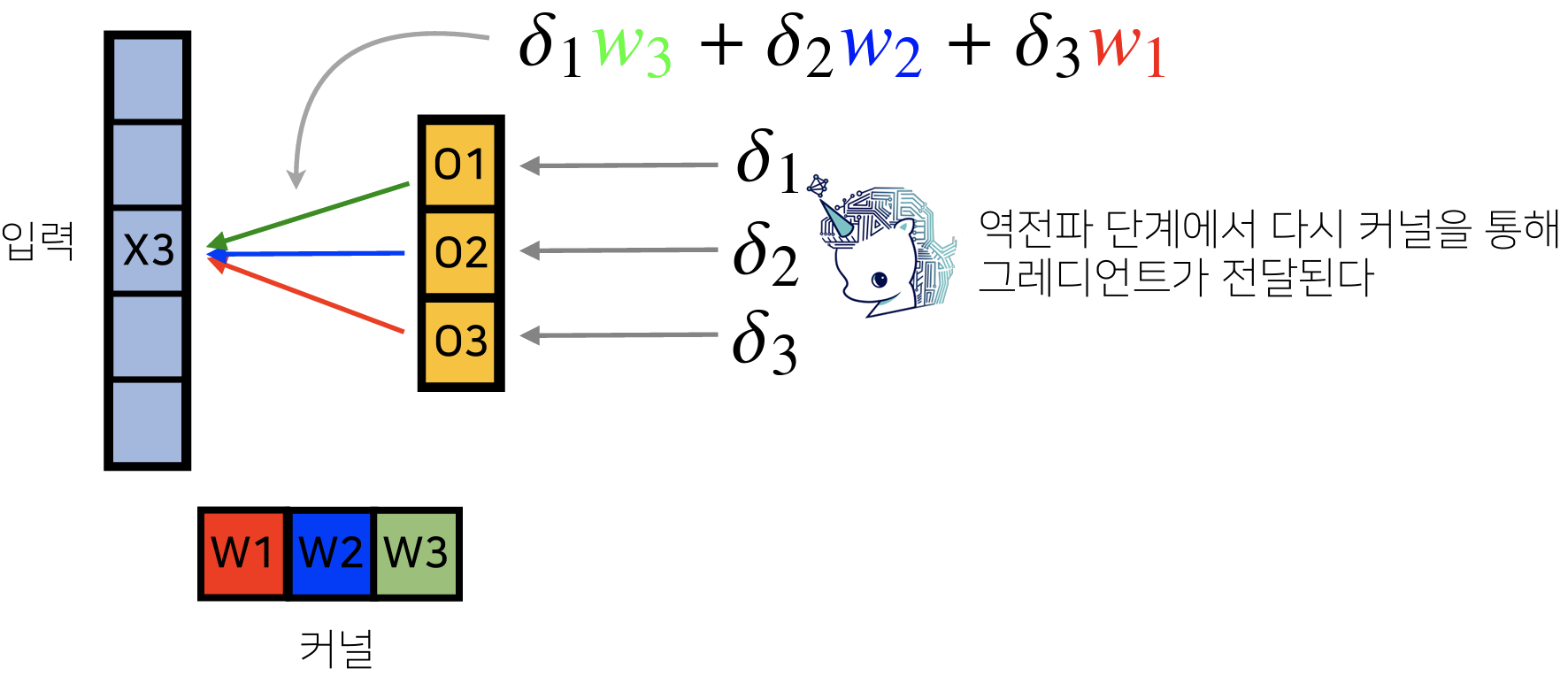
커널이 모든 입력에 공통 적용되기 때문에 역전파 계산할 때도 convolution 연산을 한다. (Discrete 일 때도 성립한다.)
- → , → , →
각 는 미분값.
위에선 수학적으로 접근했다면
이제는 단순하게 정리해보겠다.
-
CNN은 convolution layer, pooling layer, and fully connected layer로 구성된다.
- Convolution and pooling : feature extraction
-> Convolution Layer에서는
Kernel이 Input을 Stride만큼 옆으로 가며 Feature를 뽑는다. - Fully connected layer: decision making (e.g., classification)
- Convolution and pooling : feature extraction
-
EX)
- 5x5x3 Kernel 1개가 32x32x3 image를 읽으면 28x2x1 feature가 된다.
- 32x32x3 image를 5x5x3 kernel 4개 28x28x4 feature가 된다.
-
Stride : Kernel의 step size를 결정한다.
- 1이면 1픽셀, 2면 2픽셀을 움직이고 그에 따라 output size가 감소한다.
- 큰 값의 Stride를 사용하면 Output feature의 Spatial Dimensions을 줄여 computational complexity를 줄이고 Overfitting을 방지할 수있지만 정보의 손실 또한 발생한다.
-
Padding : Input의 spatial dimensions을 보존하기 위해 사용한다.
- Kernel이 Input을 Sliding 할 때 가장자리에 있는 픽셀은 비교적 잘 반영되지 않는다.
또한 Input에 비해 Output의 크기가 무조건 감소한다. - 이를 방지하기 위해 Convolution 연산 전에 Input 테두리에 추가적인 pixel을 더한다.
- 이러면 데이터의 축소도 막고 edge pixel도 활용할 수 있다.

- Kernel이 Input을 Sliding 할 때 가장자리에 있는 픽셀은 비교적 잘 반영되지 않는다.
-
Parameters 수 계산해보기
- Input : W = 40, H = 50, C = 128 / Output: W = 40, H = 50, C = 64 / 3x3 Kernel, Padding = 1 ,Stride = 1
일 때, Parameters의 개수는?
->
- AlexNet
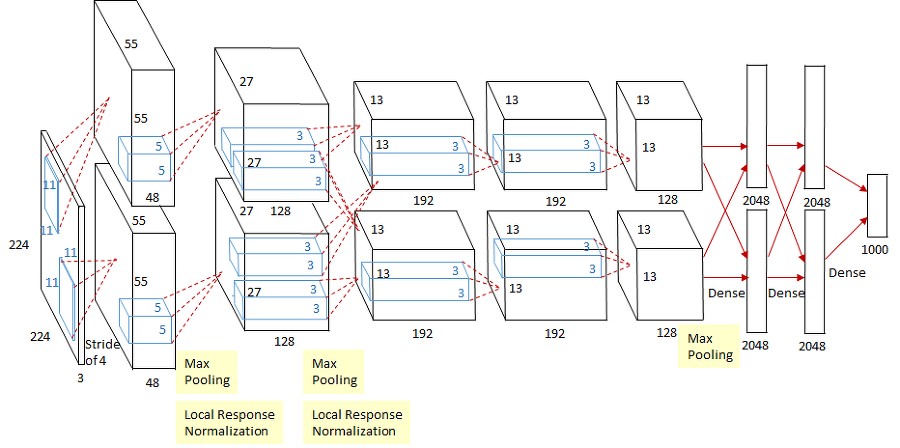
...
- Input : W = 40, H = 50, C = 128 / Output: W = 40, H = 50, C = 64 / 3x3 Kernel, Padding = 1 ,Stride = 1
참고 자료
막상 하면 모르니까 일단 하자.