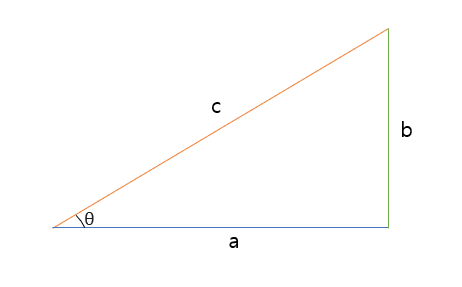
덧셈과 곰셈으로 벡터의 이동을 표현할 수 있었지만 벡터의 회전의 경우는 삼각함수가 필요하다.
sinθ=cb cosθ=ca tanθ=ab
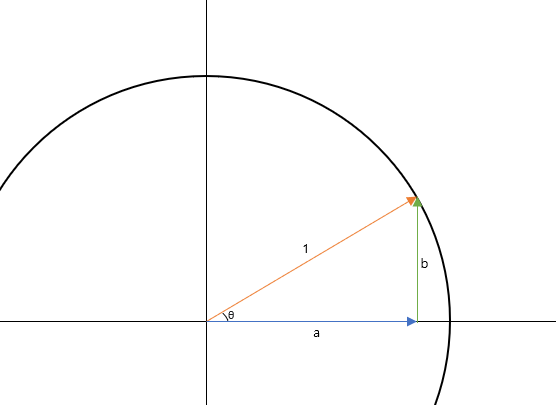
c의 길이가 1이라고 가정하면, sinθ=b, cosθ=a 가 된다.
따라서 반지름이 1인 원을 구성하는 점의 좌표는 (cosθ,sinθ)로 나타낼 수 있다.
만일 여기서 반지름을 1이 아닌 r로 설정하면 반지름이 r인 원을 구성하는 점의 좌표는 (r∗cosθ,r∗sinθ)가 된다.
피타고라스의 정리에 따라 하나의 공식을 도출할 수 있는데, 이는 다음과 같다.
sin2θ+cos2θ=1
삼각함수의 성질
sin함수와 cos함수는 다음과 같은 성질이 있다.
sin함수와 cos함수는 1≤sinθ≤−1, 1≤cosθ≤−1의 범위를 갖는다. sin함수와 cos함수는 360∘를 주기로 반복된다. sin함수 그래프는 원점 대칭, cos 함수는 y축 대칭을 이룬다. 이를 통해 아래의 성질을 도출할 수 있다. sin(−θ)=−sin(θ) cos(−θ)=cosθ
tan함수는 다음과 같은 성질이 있다.
tanθ=cosθsinθ
분모가 cos함수인데, 분수식에서 분모가 0이 되어서는 안되므로 cos함수가 0이 되는 90∘ 마다 tan함수는 존재하지 않는다. (−90∘, 270∘ 등)
호의 길이로 각도를 표현하는 방법으로 호도법으로 표현하는 각의 크기를 rad라고 한다. rad은 각도에 대응하는 호의 길이를 원의 반지름으로 나눈 값이다.
180∘에 해당하는 반지름 1의 반원의 호 길이가 π이므로, π(rad)=180∘가 성립한다. 1(rad)은 호의 길이가 1일 때, 생기는 부채꼴의 각도 π180∘이다.
벡터의 회전
회전은 x,y값이 모두 영향을 받기 때문에 계산이 어렵다.
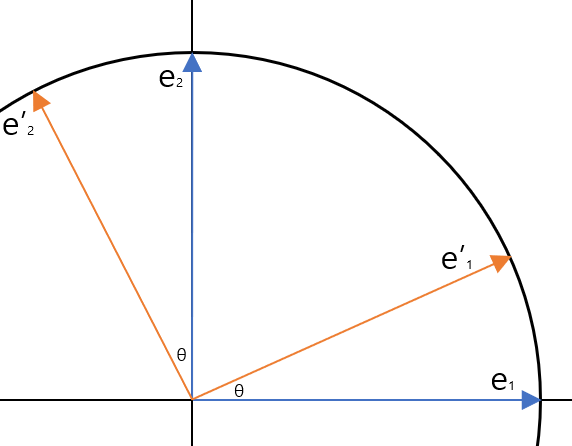
실벡터공간 R2 는 e1=(1,0),e2=(0,1)의 선형 결합으로 표현된다. R2를 θ만큼 회전하면 표준기저 e1,e2는 다음과 같은 e1′,e2′로 변한다.
e1′=(cosθ,sinθ),e2′=(−sinθ,cosθ)
따라서, 만일 벡터 v=e1+e2라고 두면, v를 θ만큼 회전한 v′=(cosθ,sinθ)+(−sinθ,cosθ)가 되므로 v′=(cosθ−sinθ,sinθ+cosθ)이다.
보다 일반적인 벡터 v=(x,y)는 x∗e1+y∗e2이고, v′=(x′,y′)=xcosθ−ysinθ,xsinθ+ycosθ)로 일반화된다.
x′=xcosθ−ysinθ y′=xsinθ+ycosθ
삼각함수의 역함수
벡터의 좌표에서 반대로 회전각도를 구하려면 삼각함수의 역함수가 필요하다. 전단사함수만이 역함수가 존재하는데, sin,cos함수는 전단사함수가 아니다. 이때 공역의 범위를 [−1,1]로, 정의역의 범위를[−90∘,90∘]으로 제한하면 sin,cos함수를 한정적으로 전단사함수로 만들 수 있다.
tan의 경우, 90∘마다 무한대로 발산하므로 −90∘,90∘은 정의역이 존재하지 않는다. 따라서, 정의역을 (−90∘,90∘)으로 제한하면 전단사함수가 된다.
정의역과 공역을 제한하면 각 삼각함수들은 전단사함수의 성질을 띄어 역함수가 존재할 수 있다. 이를 각각 표현하는 함수는 다음과 같다.