Simscape Onramp 과정
Simscape에는 전기 모터, 냉동 시스템, 유압 액추에이터 등을 모델링할 수 있는 포괄적 라이브러리가 포함되어 있음
저항기, 파이프와 같은 블록이 있고, 엔지니어링 도면 만드는것과 유사
멀티 도메인을 빠르게 개발이 가능하다
시뮬레이션을 파라미터화 하고 제어기를 만들어서, HIL 테스트를 수행할 수 있다
간단한 전기, 기계 유체 시스템 모델링해보자
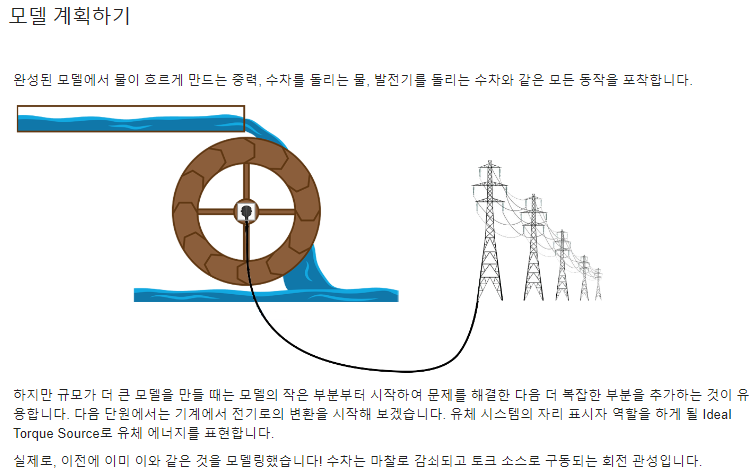
마지막으로 이 3 도메인 모두 사용하는 발전용 수차를 만들어보자. 이후 수차의 회전 속도가 일정하게 유지되도록 모델을 Simulink 피드백 제어 루프에 통합해보자.
마지막으로, 모터 제어 밸브 모델링 해보자
이중 질량 스프링 댐퍼
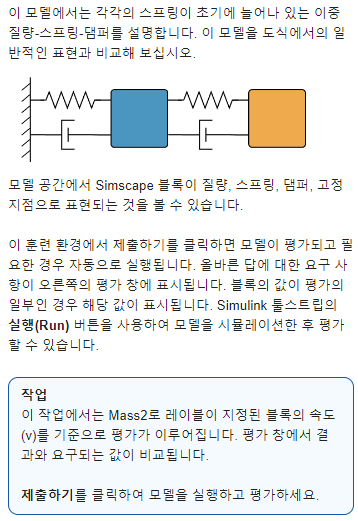
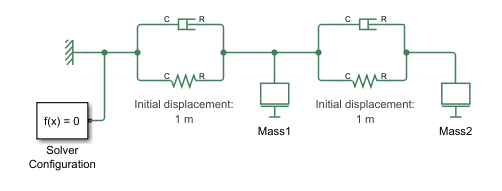
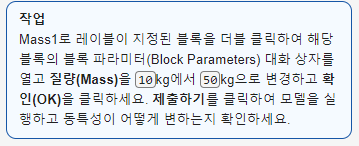
Simscape로 실제 구성요소를 나타내는 블록을 사용하고, 직관적인 방식으로 연결하여 물리시스템 모델링 가능.
블록간의 인터페이스는 물리 인터페이스를 나타낸다
Simscape 모델 실행하면, 알아서 물리네트워크 분석해서, 풀어야 할 방정식을 구한 다음 계산을 수행한다. Simulink 는 방정식을 직접 지정해야하지만 Simscape는 이렇게 하지 않아도 된다.
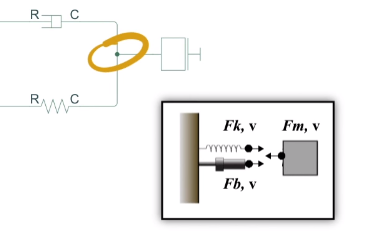
시뮬링크 기반이기 때문에, Simscape 물리 모델을 State Flow, Matlab, 다른 시뮬링크 모델과 연결할 수 있다
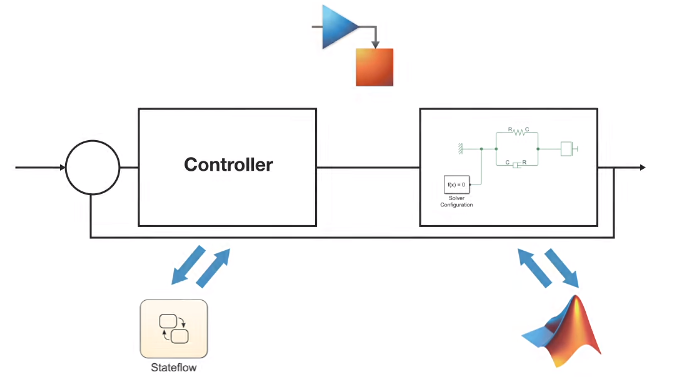
simscape Foundation 라이브러리에는 다양한 물리 도메인을 위한 블록과 유틸리티 존재
이 기능을 확장해서 차량의 동특성, 전력 시스템 구현 기능을 제공하기도 한다
Simscape Onramp에서는 Foundation 라이브러리만 사용
RC 회로(자유 응답)

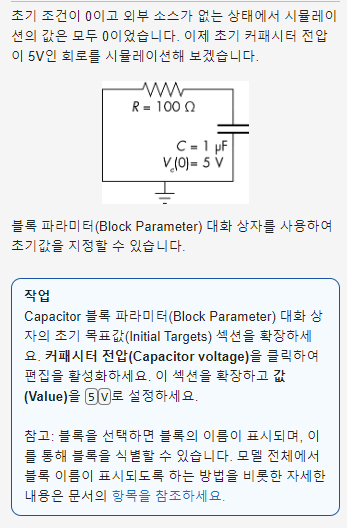
Simscape로 회로 만들 수 있다, 캐퍼시터 초기값 줄 수 있다
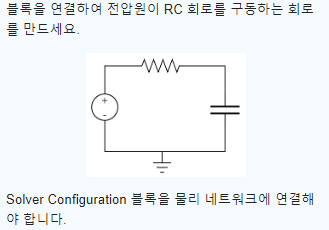
RC 회로(구동 응답)
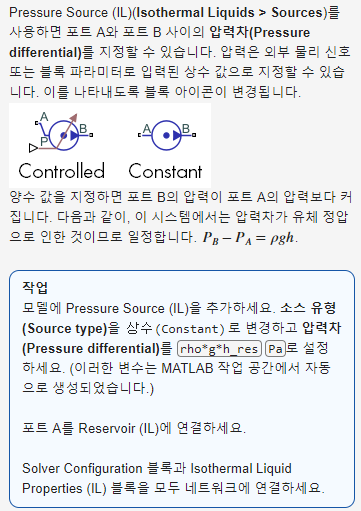
외부 입력에 대한 시스템 응답을 모델링하기 위해서는 소스 필요
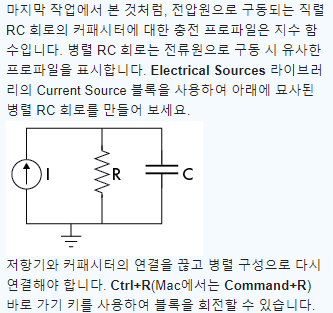
DC, AC 전압원 전류원 존재
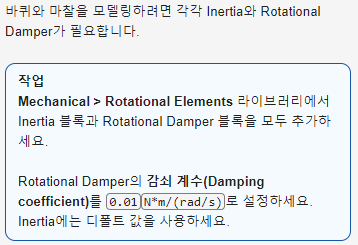
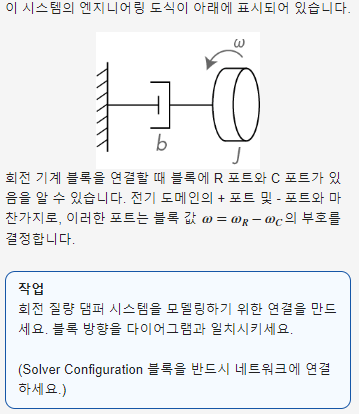
회전 질량 댐퍼
Simscape에서 물리량 측정하기
Simulink의 Scope, Data Inspector 사용 가능
Simscape 자체 툴인 Simscape Results 사용 가능
모델 시뮬레이션하고, Simscape Results로 각 블록의 변수 플롯 확인 가능
(ex: 캐피시터 충방전 시간에 따른 변화)
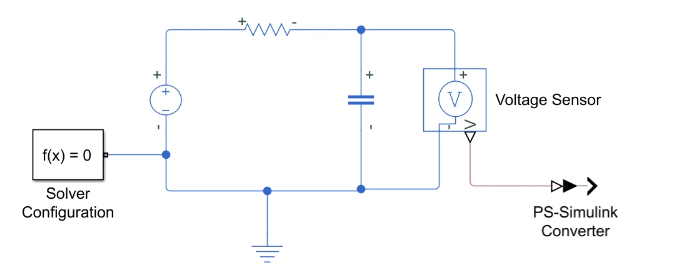
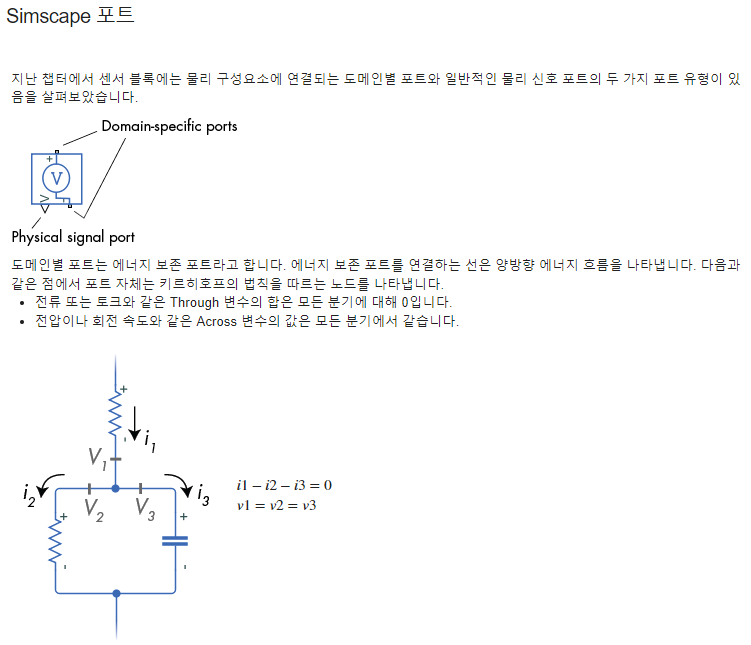
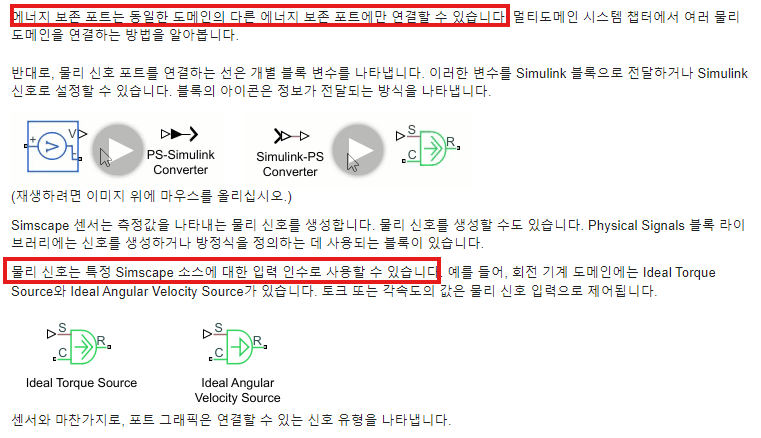
Simscape 센서로 물리 도메인의 특정 양 측정하고 물리 신호로 출력 가능, 이것을 Simulink 블록에 연결해서 사용 가능
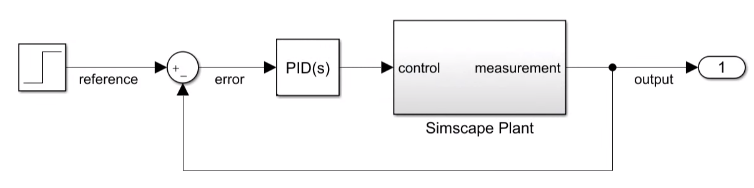
이런식으로 플랜트 출력을 제공하는데 사용
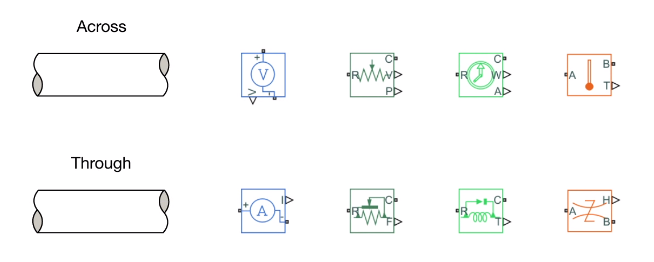
Across, Through 변수 있으니 유의
(!전압 센서는 저항과 병렬, 전류 센서는, 직렬로 연결해야한다.)
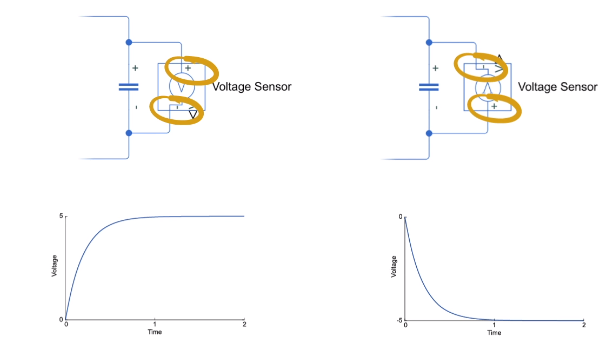
또한 양의 방향에 대한 규칙이 존재한다
물리 신호
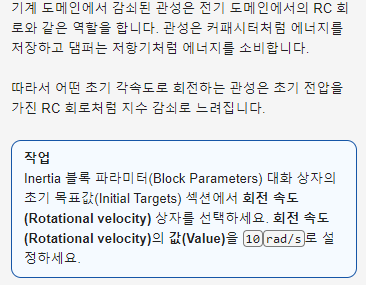
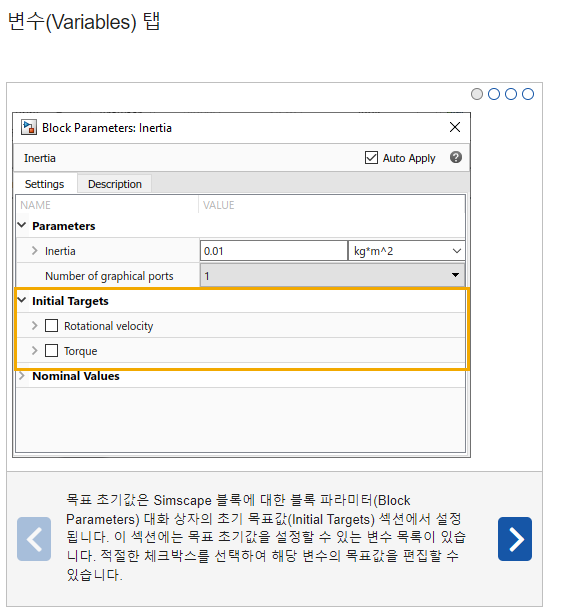
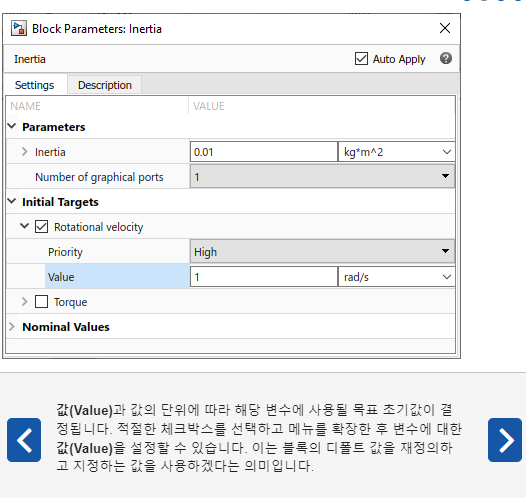
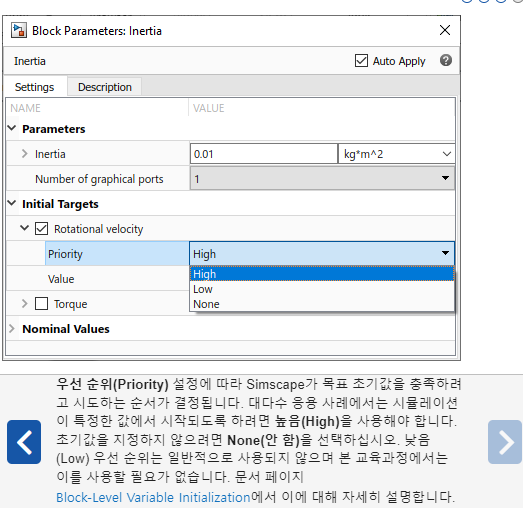
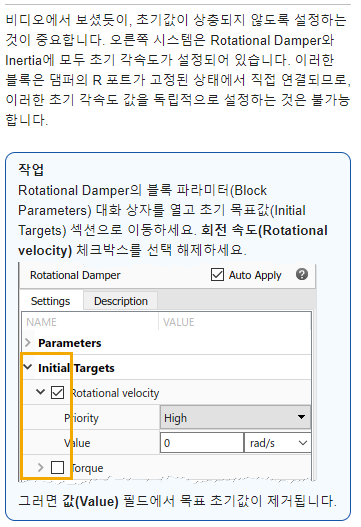
목표로 할 초기값
질량 댐퍼 시스템 모델을 Simulink 로 만들면 방정식 만들고 초기값 넣어야한다.
Simscape의 경우 방정식은 자동으로 만들지만 초기값은 사용자가 설정한 목표값을 기반으로 초기값도 알아서 계산해준다

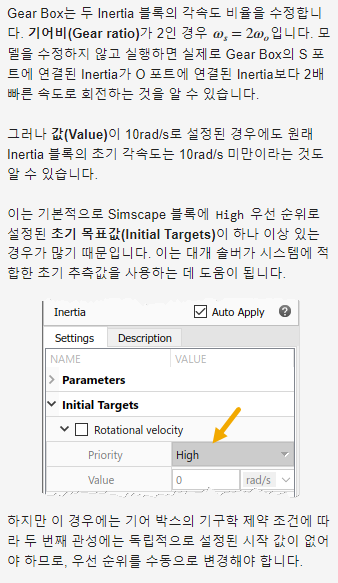
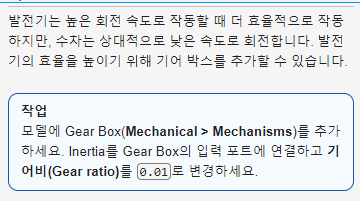
기어박스로 각속도 비율 수정 가능
로봇과 차량같은 대규모 시스템 -> 멀티 도메인 모델 필요
다양한 물리 라이브러리 있지만, 닥 물리 블록을 다른 물리 블록에 직접 연결 X
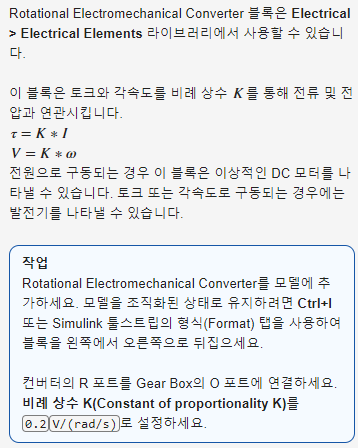
DC 모터처럼, 변환기 필요, Simscape에서는 컨버터 블록 사용함
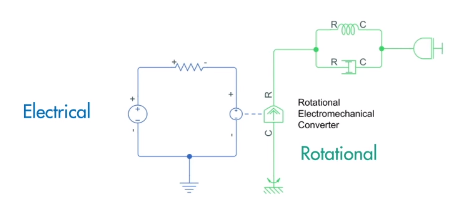
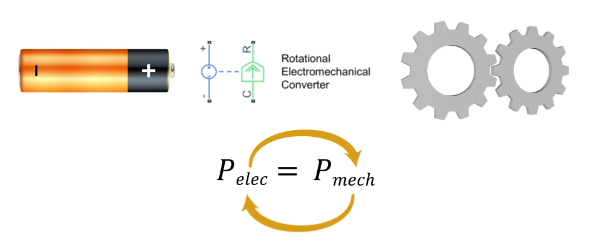
무손실 에너지 변환 블록이고, 에너지 변환도 양방향임
(전기로 모터 돌릴 수 있고, 모터로 발전기 만들 수도 있음)
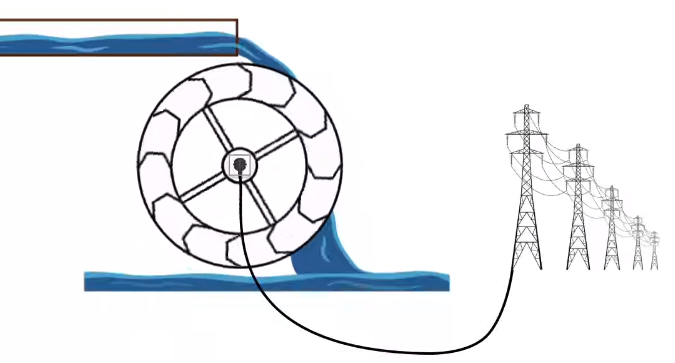
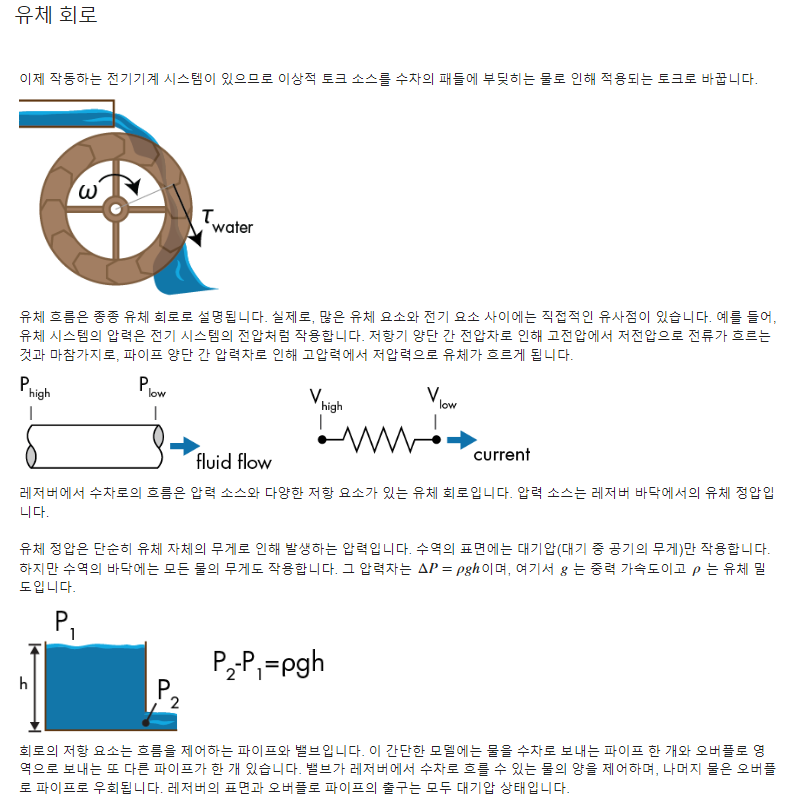
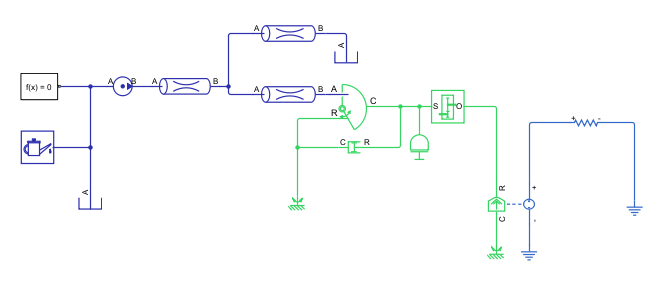
수력 -> 수차 회전 -> 전기 생성
(유체, 기계, 전기 세 가지 물리 도메인으로 만들어진 시스템)
수력 발전기 모델
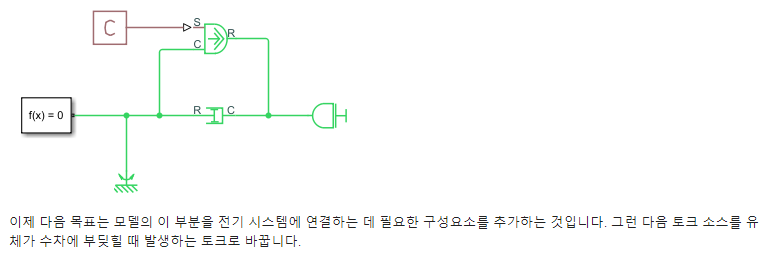
최종 모델링
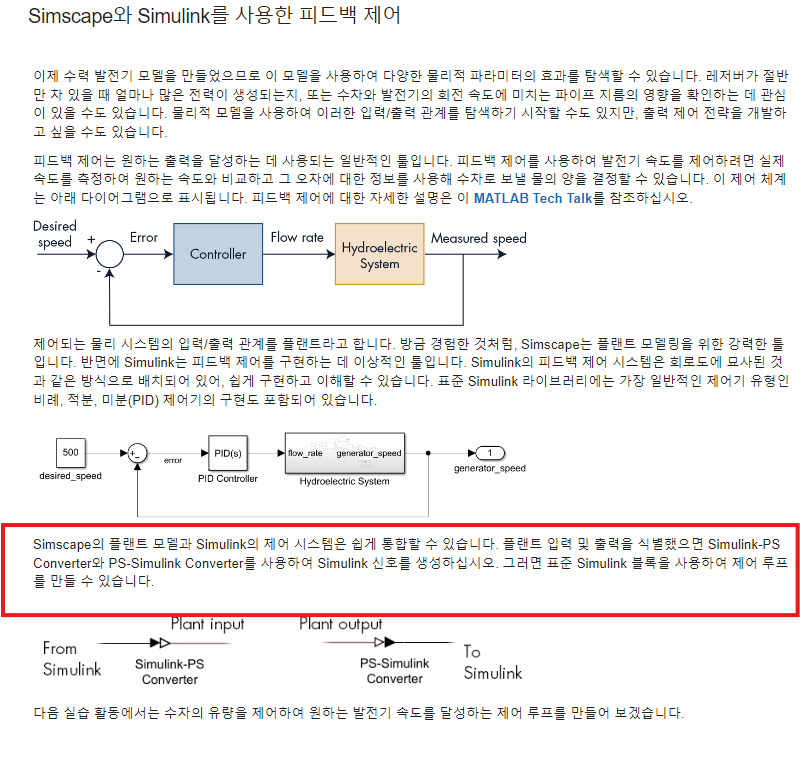
Simulink로 FeedBack 제어
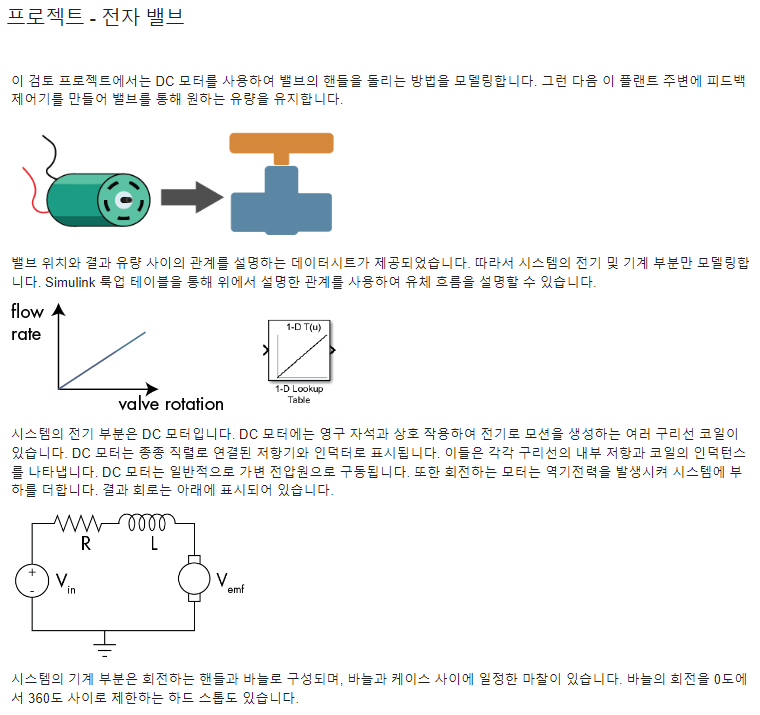
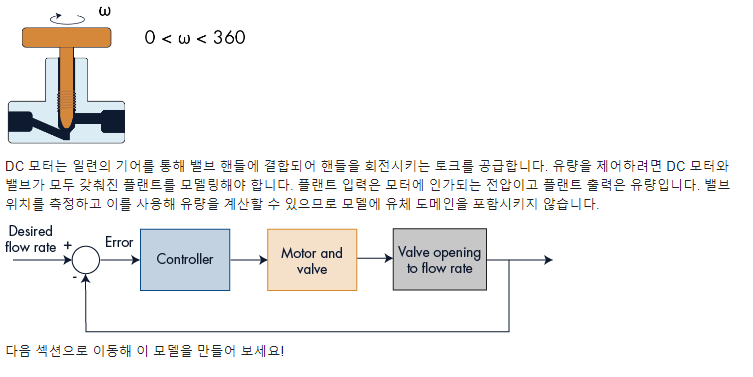
전자 밸브- 생략
정리