Lecture 18
Continuous-state MDP
여태까지는 유한한 상태의 MDP에 대해 알아보았다면, 이제는 무한한 상태, 즉 연속적인 상태의 MDP에 대해 알아보자
예를 들어, 자동차의 경우 자동차에는 무한한 경우의 위치가 있기 때문에 state의 개수가 무한하다고 할 수 있다. ****
이 때, MDP를 어떻게 해결할 수 있는지 알아보도록 하자.
1. Discretization
Continuous-State MDP를 쉽게 해결하는 방법은 state space를 discretization하는 것이다
state space를 이산화하고 그 후에 value iteration이나 policy iteration같은 방법을 사용한다.
그러나 이산화를 사용하는 방법은 치명적인 단점 2가지가 있다.
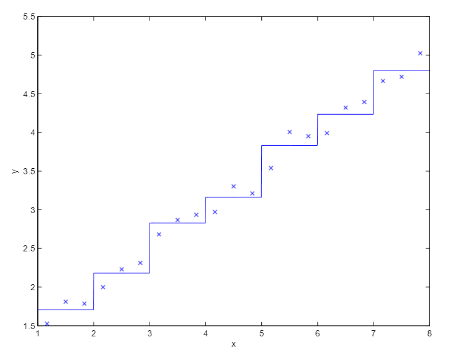
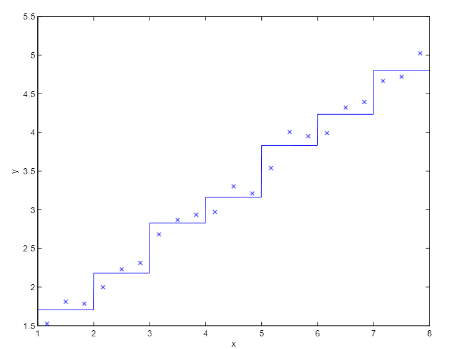
- 선형회귀의 경우, space를 이산화 하는 것이, 오히려 예측에 도움이 되지 않는다.
- 데이터의 수가 많고 feature의 수가 적은 경우→ 이산화 하는 것이 나쁘지 않을 수 있다.
- 그러나 그렇지 않은 경우, 원래의 선형회귀의 경우, 더 function을 부드럽게 만들 수 있음에도 이산화를 쓰면 그렇지 못하기 때문에 좋은 예측을 하지 못하고, 문제가 생긴다.
- Curse of dimensionality
- 만약에 m개의 차원을 k value로 이산화를 했다면 state의 총 개수는 개가 된다, 이 문제는 사실 작은 차원 때는 문제가 되지 않지만, 차원의 수가 커진다면 잘 작동하지 않는다.
2. Value function approximation
discretizaiton을 쓰지 않고 continuous-state MDP에서 policy를 찾는 방법인 value function approximation에 대해 알아보자.
value function approximation를 하기 위해서는 model(simulator)이 있어야 한다.
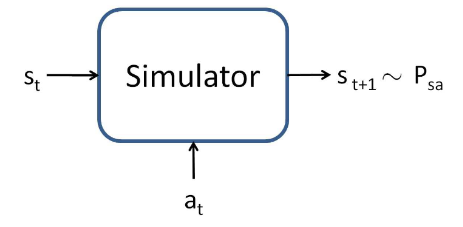
는 연속적인 상태이고, 는 행동이며, simulator의 결과물은 다음 state와 확률 이다.
- model을 만드는 여러가지 방법이 있는 데 그 중에 한 가지 방법은 physics simulator이다.
물리학적 문제에서 여러가지 상태를 알면, 그 때의 그 다음의 상태를 바로 알 수 있다.
예를 들어, 역진자 문제에서, 막대의 길이, 막대의 질량, 기타 등등을 알면 다음 진자의 상태를 알 수 있다.
- Learn from a data collected in the MDP
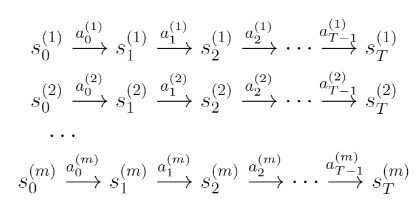
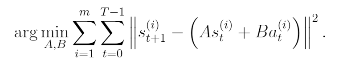
예를 들어, MDP에서 m개의 시도를 할 때, 각각 T개의 timestep이 있다.
이 때, 현재 상태와 현재의 행동을 통해 다음 상태를 예측할 수 있다. 곧,라고 할 수 있다.
선형회귀의 알고리즘과 비슷하다고 할 수 있기 때문에 위의 A,B는 model의 파라미터라고 할 수 있다.
이 때, 와 를 넣었을 때, 가 바로 결정 되기 때문에 deterministic model이라고 부른다.
또한, 이 랜덤함수의 결과물일 때, stochastic model 라고 한다.

(는 noise로서 을 따른다.)
지금 까지 알아본 것은 모두 linear function에 대한 것이고,
non-linear function에서도 next state를 구할 수 있다.
라고 할 때, 와는 non-linear한 feature의 state 와 action의 집합이다.
3. Fitted value iteration
17강의 value iteration과 어떤 것이 다른지 비교하면서 보면 좋을 것 같다.
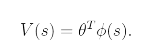
Fitted value iteration에서는 V(s)를 다음과 같은 식으로 정의할 것이다.
phi는 state의 몇가지 적절한 feature이다.
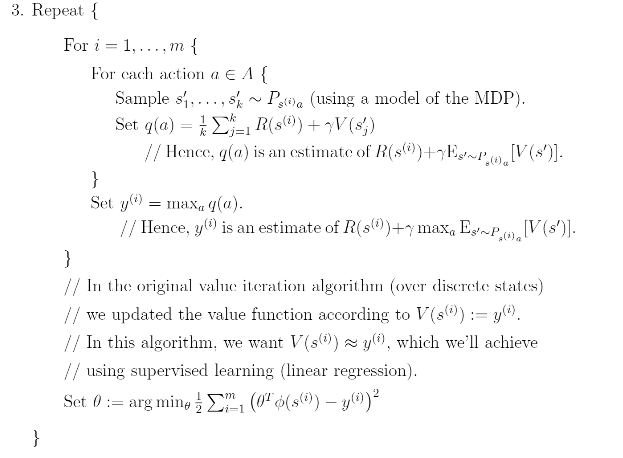
Fitted value iteration의 순서는 다음과 같다.
- 랜덤하게 m개의 state를 sampling한다.
- 를 0으로 초기화한다.
- (선형회귀에서는 x→y로의 매핑을 하지만, 여기서는 s→v(s)로의 매핑을 한다.) 다음과 같은 과정을 반복한다.
결론적으로,
Fitted value iteration은 에 대한 근사치를 준다.
는 다음과 같은 식으로 표현 할 수 있기 때문에
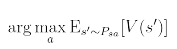
fitted value iteration을 통해 policy 또한 정의할 수 있다.
Computing과 approximating의 과정이 fitted value iteration의 loop 과정과 굉장히 유사하기 때문에, fitted value iteration을 통해 연속적인 state를 가진 상황속에서도 real time optimization 알고리즘을 쓸 수 있다.
