실습에는 평면을 구현하는 부분이 없었기에 기존 코드, 구조체에 평면에 대한 함수를 추가하였다.
드디어 실습 자료를 벗어났다...!
추가된 코드
structures.h
struct s_plane
{
t_point3 center; // 평면의 어느 한 지점.
t_vec3 dir; // 평면이 가리키는 방향, 어떻게 기울여져 있는지
};평면에 대한 정보를 담을 구조체를 만들어준다. 평면은 특정 지점에서 특정 벡터를 바라보며 무한히 뻗어나가는 형태이기에 범위는 존재하지 않는다.
hit.c
#include "trace.h"
t_bool hit(t_object *world, t_ray *ray, t_hit_record *rec)
{
t_bool hit_anything;
t_hit_record *temp_rec;
temp_rec = rec;
hit_anything = FALSE;
while (world) // world->next로 훑어가며 등록된 구조체를 전부 체크함
{
if (hit_obj(world, ray, temp_rec))
{
hit_anything = TRUE;
temp_rec->tmax = temp_rec->t;
rec = temp_rec;
}
world = world->next;
}
return (hit_anything);
}
t_bool hit_obj(t_object *world, t_ray *ray, t_hit_record *rec)
{
t_bool hit_result;
hit_result = FALSE;
if (world->type == SP)
hit_result = hit_sphere(world, ray, rec);
else if (world->type == PL)
hit_result = hit_plane(world, ray, rec);
else if (world->type == CY)
hit_result = hit_cylinder(world, ray, rec);
return (hit_result);
}도형에 따라 다른 충돌 체크 식이 들어가므로 조건문으로 분기를 걸어주자.
hit_plane.c
#include "structures.h"
#include "utils.h"
#include "trace.h"
t_bool hit_plane(t_object *pl_obj, t_ray *ray, t_hit_record *rec)
{
t_plane *pl;
float numrator;
float denominator;
float root;
pl = pl_obj->element;
denominator = vdot(ray->dir, pl->dir);
if (fabs(denominator) < EPSILON)
return (FALSE);
numrator = vdot(vminus(pl->center, ray->origin), pl->dir);
root = numrator / denominator;
if (root < rec->tmin || rec->tmax < root)
return (FALSE);
rec->t = root;
rec->p = ray_at(ray, root);
rec->normal = pl->dir;
set_face_normal(ray, rec);
rec->color = pl_obj->color;
return (TRUE);
}공식

수직인 벡터끼리의 내적 결과는 0
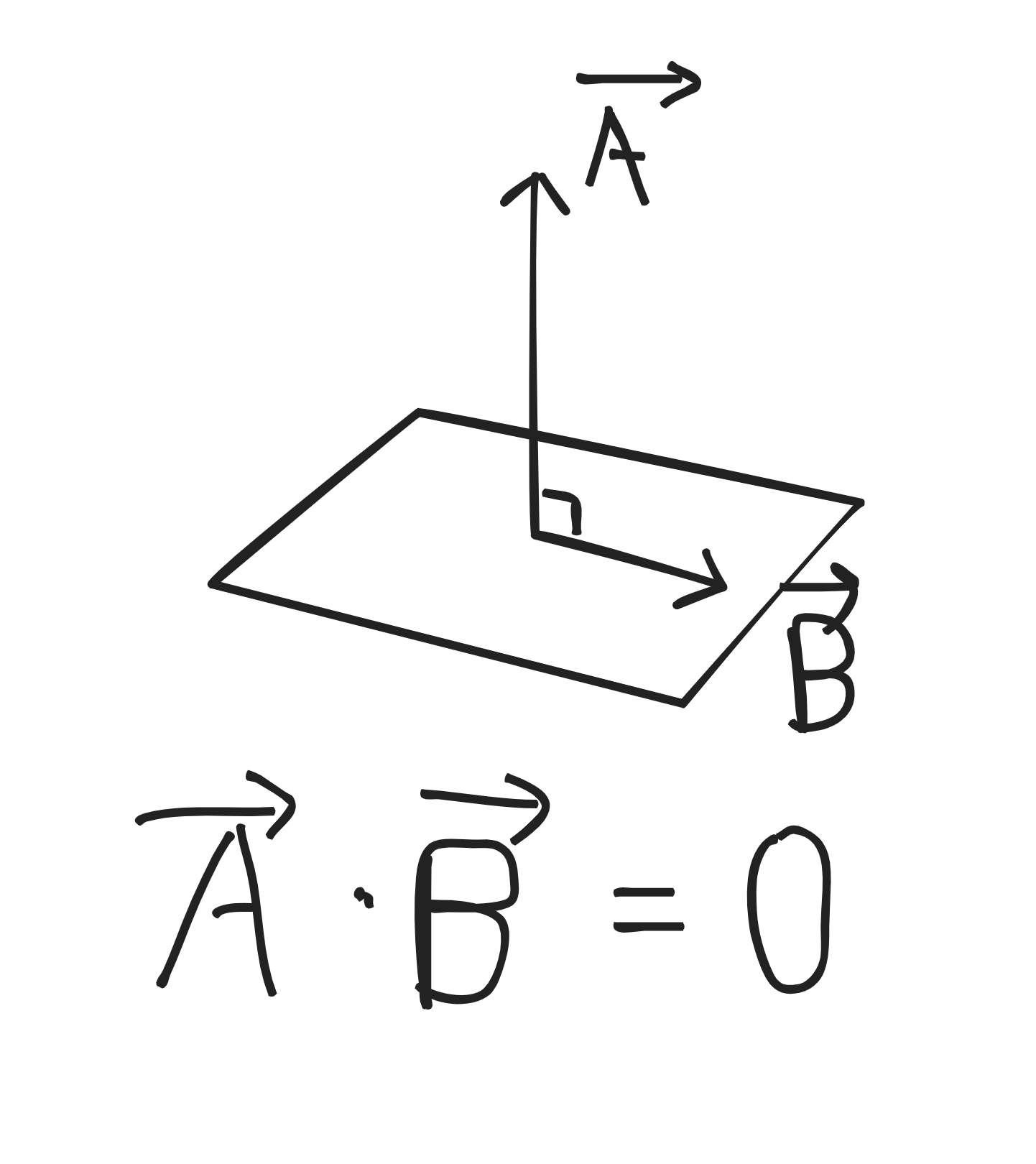
벡터의 내적이 또 등장한다. 서로 수직인 벡터를 내적하면 결과값이 0이 나온다는데, 생각해보면 당연한 결과다. 내적의 뜻은 어떤 벡터가 다른 벡터의 방향에 얼마만큼 도움을 주었는가 라고 말할 수도 있는데, 서로 수직이라면 그 어떤 도움도 주지 않았지만 방해도 주지 않았기에 0이라는 값이 나올 수 있는 것이다.
](https://user-images.githubusercontent.com/42318591/85204057-cf98b780-b34c-11ea-890a-c7830197aaff.png)
출처 : https://ansohxxn.github.io/c++ games/chapter3-2-2/
판별식을 이용한 충돌 공식
이제 다시 한 번 사진을 보자.
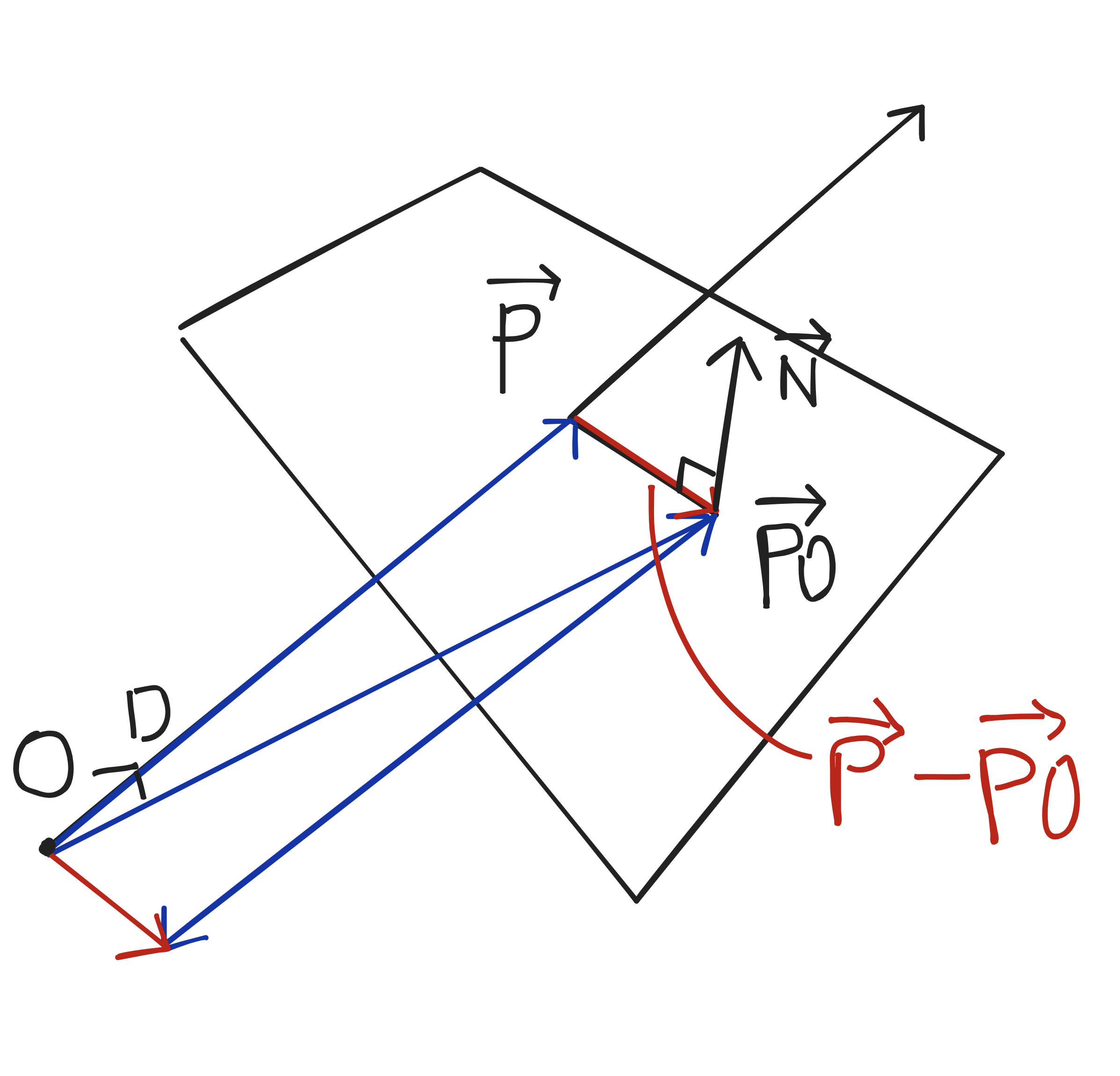
벡터 P는 카메라에서 출발한 임의의 광선이다.
벡터 P0는 인자로 제공되는 평면 상에 어딘가에 존재하는 점이다. 평면의 일부분이라고 할 수 있다.
벡터 N은 인자로 제공되는 평면의 방향 벡터이다. 이 방향 벡터의 수직으로 평면은 뻗어나가고 있다.
바로 위에서 언급했던 것처럼 서로 수직인 두 벡터를 내적하면 0이 나온다는 사실을 우리는 알고 있다.
벡터 N과 수직인 벡터라고 함은 평면의 일부분인 P0과 평면을 지나고 있는 점 P를 이은 벡터, 벡터 P - 벡터 P0이라고 할 수 있을 것이다.
이를 수식으로 표현한다면 다음과 같다.
이 수식을 전개하면 다음과 같아진다.
O는 원점, 벡터 D는 벡터 P의 단위 벡터, t는 P까지의 거리(스칼라)이다!
이 수식을 거리인 t에 대한 식으로 전개하면 다음과 같다.
위의 식이 판별식이 되어 t가 음수라면 해당 광선, 벡터 P는 평면과 만나지 않는 벡터가 된다.
평면의 벡터가 카메라의 벡터와 반대편일 경우에도 충돌이라고 판정을 해주어야 한다. 판별식의 조건을 절대값으로 체크하자.
코드로 구현할 경우
t_bool hit_plane(t_object *pl_obj, t_ray *ray, t_hit_record *rec)
{
t_plane *pl = pl_obj->element;
float numrator; // 판별식의 분자
float denominator; // 판별식의 분모
float root;
denominator = vdot(ray->dir, pl->normal);
if (denominator < EPSILON) // 분모의 값이 0보다 작거나 같을 경우 충돌하지 않는다.
return (FALSE);
numrator = vdot(vminus(pl->point, ray->orig), pl->normal);
root = numrator / denominator;
if (root < rec->tmin || rec->tmax < root)
return (FALSE);
rec->t = root;
rec->p = ray_at(ray, root);
// rec->normal = pl->normal;
rec->albedo = pl_obj->albedo;
// print_vec(normal);
return (TRUE);
}- 벡터 O : 광선의 시작점,
ray->orig - 벡터 D : 광선의 방향 벡터(단위 벡터),
ray→dir - 벡터 N : 평면의 뱡향 벡터(단위 벡터),
pl→normal - 벡터 P0 : 평면의 어느 한 지점,
pl→point
레퍼런스
